冰激力作用下的破冰船尾部振动响应分析
2022-07-19郭建捷崔海鑫李聪王伟
郭建捷,崔海鑫,李聪,王伟
(中国船舶及海洋工程设计研究院,上海 200011)
船舶在冰区航行过程中,冰雪环境时会对船舶运动稳性产生较大影响;当船舶周围有大面积的浮冰聚集,船舶航速将大大降低,影响推进效率;船舶在破冰过程中撞击冰层,极易造成船体结构及附体的变形或损伤;特别的,当破冰船吃水深度较浅时,螺旋桨就会离水线较近,此时若船载货量较少,螺旋桨在冰水中旋转引起碎冰冲击船底表面产生的脉动冰激力,使船体结构产生较大振动响应,对船体结构及船员健康造成危害。目前,学者对船体冰载荷进行了大量的模型试验和数值计算模拟,对冰桨相互作用的研究主要是针对螺旋桨的性能分析,包括利用非线性有限元软件对冰桨相互作用下的螺旋桨性能进行研究,并分析碰撞过程中螺旋桨压力的变化规律及动态响应;通过冰桨接触近场动力学模型模拟冰桨铣削过程,分析冰桨接触冰载荷变化特性等。而针对以冰桨相互作用产生的冰激力作为激振力来评估船体振动响应却鲜有报道。为此,考虑通过对破冰船螺旋桨与海冰相互作用的模拟和分析,进行冰激力作用下的破冰船尾部振动响应数值预报,为船体结构振动评估提供支撑。
1 冰-桨激振力计算
1.1 冰-桨相互作用过程
冰-桨相互作用示意于图1。考虑船舶在冰区航行首部破冰时,破碎的冰块在水流的作用下会沿着船底向船尾部移动,当碎冰块运动到螺旋桨的流场区域,在其流场作用下,冰块会被吸进螺旋桨区域,冰块在螺旋桨的切削作用下会加速运动,并被螺旋桨高速抛出,进而撞击船底壳产生冰荷载。

图1 桨-冰相互作用示意
1.2 碎冰离散元模型
碎冰的离散元模型见图2。

图2 碎冰模型
利用Voronoi二维图方法将海冰范围划分为不规则多边形集合,构建碎冰平面几何模型,见图2a)。选择合适粒径的球体单元紧密排列成覆盖整个碎冰区域的平整冰模型。运用切割算法生成碎冰区离散元模型,见图2b)。通过该方法可得到与实际碎冰区相似的分布。
1.3 船-桨离散元模型
首先对螺旋桨作用下的船体外流域进行数值模拟,以获取船体艉部周围的流场信息,为后续碎冰离散元计算提供前提数据。为此,采用自主开发的离散元计算软件IceDEM建立完整的船-桨模型,见图3。船-桨具体参数见表1。

图3 离散元计算中的船-桨模型
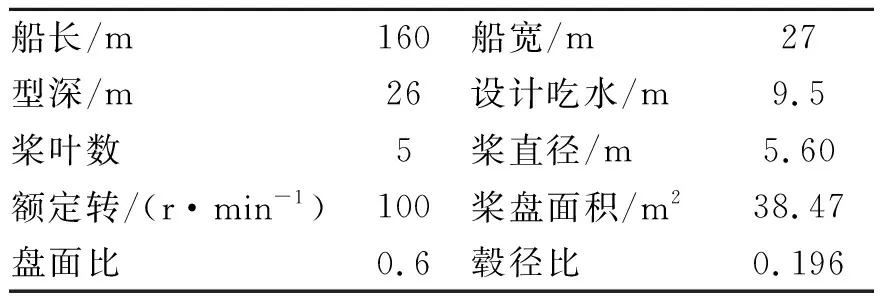
表1 船-桨参数
采用OpenFOAM的不可压缩两相流求解器interDyMFoam,结合标准k-ε湍流模型和流体体积法,模拟螺旋桨由启动至稳定旋转时,自由水面及水下流场的瞬态变化过程。
采用snappyHexMesh工具划分计算域网格,见图4。

图4 计算域网格
总单元数量为13 895 418,总节点数量为14 610 739。计算域分为静止域(船体)和旋转域(螺旋桨)两个部分,后者的网格以(0.0,0.0,7.7)为中心点,绕轴以100 r/min的速度旋转,真实模拟螺旋桨的运动。
计算域及边界条件见图5。、、方向的总长度分别为1 000、120、30 m,船体处于计算域的中央区域,可以较好地捕捉船体周围的外流场,特别是螺旋桨后方的尾流区。计算域顶部边界为开敞大气压,水流进口处边界=1.3 m/s,出口处边界自由出流,其余为无滑移固壁边界。假设起始自由水面位于=14.4 m处,水面以下相体积分数=1,=0。

图5 计算域及边界条件
1.4 海冰与螺旋桨流场的耦合
螺旋桨的转速为100 r·min,螺旋桨的旋转周期为1.6 s。计算流场信息的输出间隔为0.1 s,将由此生成的16个流场速度文件作为离散单元的流场速度输入条件。由于离散单元是在GPU并行环境下进行计算,因此需要将读入的流场速度信息在并行环境下与离散单元建立关系。
每个离散元单元都与划分的网格一一对应,因此首先需要将流场的数据点与网格相对应,具体参照离散元的网格对应方法,见图6。
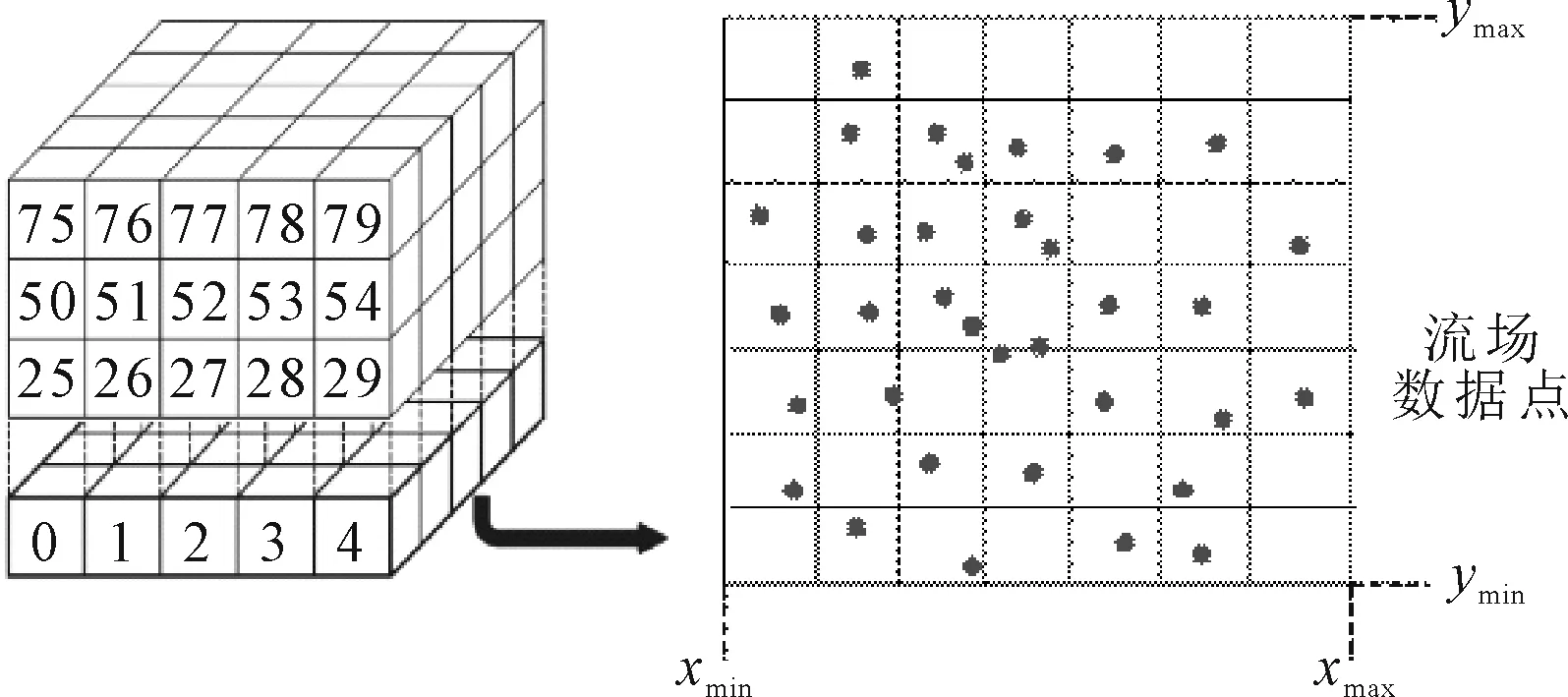
图6 流体速度信息的网格划分图
在三维计算空间中,划分均匀的计算网格,将流场速度数据点与各网格的编号相对应如下。
=++
(1)
式中:为流体数据点的网格编号;、为,方向划分网格的总数;、以及分别为流体数据点在,,三个方向的网格编号,如下式:

(2)

(3)

(4)
式中:、和分别为流体数据点在笛卡尔坐标系下的坐标;、以及分别为网格,,三个方向的最小边界值;为网格的尺寸。
1.5 计算结果分析
建立海冰-螺旋桨-流体耦合模型见图7,模拟不同海冰冰厚下,海冰与螺旋桨的相互作用。螺旋桨的转速为100 r/min,计算流场信息的输出间隔为0.1 s。冰层范围10 m×14 m,海冰密集度60%。

图7 海冰-螺旋桨-流体耦合模型
根据海冰冰厚划分4种冰况,见表2。

表2 离散元计算冰况
计算得到不同冰厚下船底部所受最大脉动压力见图8。

图8 不同冰厚下船尾部的最大压力分布
从图8可以看出:不同冰厚下船底所受的压力分布不同,这是由于碎冰单元在流场的作用下存在很大的随机性,但整体上呈现压力随冰厚增大而增大的趋势。以冰厚为0.2 m的工况为例,艉部所受3个方向冰载荷见图9。

图9 0.2 m冰厚下艉部冰荷载时程曲线
由图9可见:船艉部的冰载荷在方向主要集中在负方向,方向则相对对称,方向冰载荷为正方向;随着时间的推进,各方向冰载荷大小并没有明显的规律,呈现很大的随机性。不同冰厚下艉部所受冰载荷见表3。

表3 船艉部冰荷载统计 kN
由表3可见,3个方向的冰荷载大小均随冰厚的增加和增大,说明冰厚对艉部冰荷载的影响是明显的。
2 船体艉部振动响应计算分析
2.1 全船三维混合有限元模型
2.1.1 有限元模型的建立
采用MSC. Patran建立全船三维混合有限元模型见图10。

图10 全船三维混合有限元模型
其中艉部舱段所有板材及强构件腹板、船底肋板等构件采用四边形壳单元模拟;采用梁单元模拟次要构件、强构件面板及支柱。机舱横舱壁至船首区域的船体结构则用梁单元模拟,并在横剖面处建立MPC单元实现船体梁单元与艉部舱段的有效连接。由船舶实际情况简化得到一维梁模型质量和刚度等属性值。材料模型为线弹性体,根据高强钢材料特性设置弹性模量为206 GPa,泊松比为0.3,密度为7 850 kg/m。
2.1.2 附连质量与阻尼
附连水质量采用基于流固耦合分析的源汇分布法,在MSC.Nastran中通过定义有限元模型湿表面单元和吃水高度来自动实现其计算。对于阻尼,由于目前还不能通过数值计算得到,为保守起见,选取由ABS推荐的恒定临界阻尼值1.5%。
2.1.3 激振力施加方法
冰区航行船舶的有害振动主要是由螺旋桨激励引起的,特别是海冰与螺旋桨相互作用的激振力有可能引起船体艉部产生很大的结构响应。激振力通过Patran中Tabular Input功能以随时间变化的集中力形式加载到有限元模型对应位置的节点上,例如,见图11。

图11 艉部脉动冰激力加载方法示意
2.2 瞬态响应性能分析
2.2.1 工况及载荷
对于瞬态响应分析计算,选取工况为正向行驶,碎冰密集度60%,冰厚0.2 m,螺旋桨转速100 r/min。如图12所示,将IceDEM离散元计算软件计算的船体外板上碎冰撞击产生的脉动冰激力,通过有限元等效节点法转化后,分别以、、三个方向的分力作为输入加载到有限元结构模型对应节点位置上。

图12 加载冰力时程曲线
在船艉底部定义局部坐标系,并标记出各加载点作用位置,见图13。
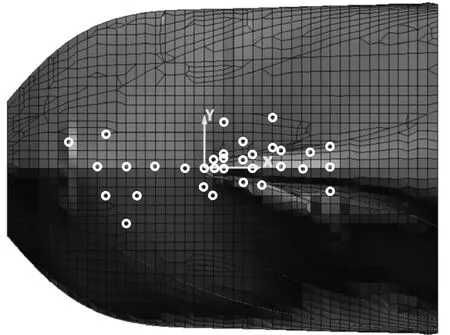
图13 局部坐标系及激振力作用位置示意
2.2.2 动力响应测点
采用模态叠加法对船体结构振动时域响应进行分析计算,其中计算步长为0.01 s,总计算时间为10 s。如图14所示,分别在各层甲板以及甲板间的支柱上选取典型位置,提取动力响应计算结果。
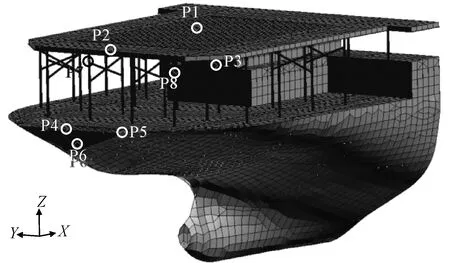
图14 动力响应测点位置示意
2.2.3 计算结果分析
各测点的动力响应峰值结果汇总于表4。
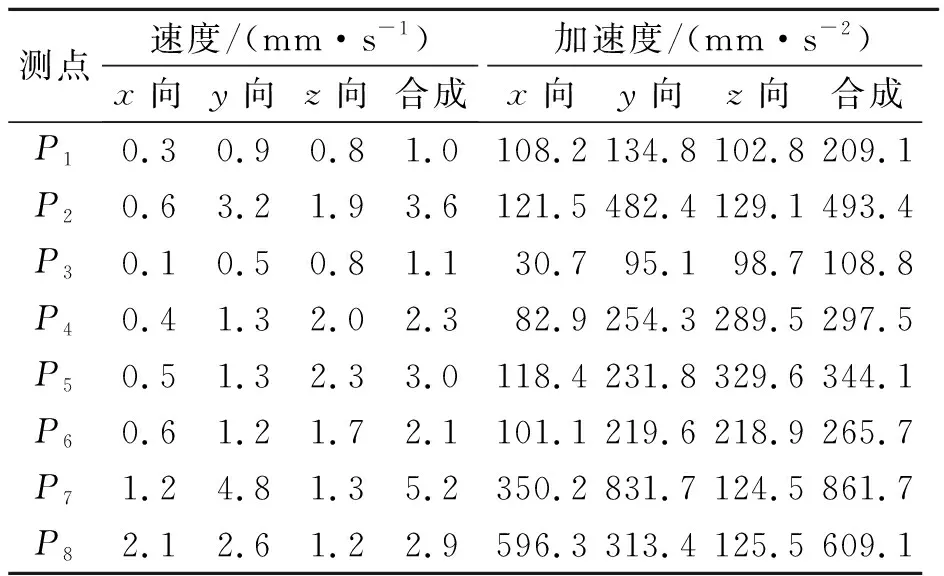
表4 各测点动力响应峰值
从计算结果可知,测点P、P和P分别位于艉封板上即艉部舱段自由端处,因此垂向响应幅值相对较大,其中P最大垂向速度达到2.3 mm/s,最大垂向加速度达到329.6 mm/s。值得注意的是,P位于02甲板自由端处,横向速度峰值达到3.2 mm/s,大于垂向速度,P即支柱上测点最大横向速度达到4.8 mm/s,这是由于总体布局的要求该船02甲板需要较大甲板面,故向外延伸形成较长悬臂结构,且下方仅通过支柱支撑在主甲板上,整体横向刚度较弱。根据GJB1045.1—90《舰艇船体振动评价基准》第4章的评估要求,选取各测点的速度响应峰值作为评估对象。从表4合成速度峰值结果可知,除测点P外,其他测点的速度峰值均小于下限值4 mm/s,评价为良好;测点P速度峰值达到5.2 mm/s,超出下限值但低于上限值22 mm/s,评价为可接受。从船员舒适度角度考虑,破冰船结构设计中应对甲板悬臂结构的横向刚度给予适当关注,对船体结构进行进一步优化。
3 结论
1)采用离散单元方法,通过构建海冰、螺旋桨、流体耦合模型,能够较好地模拟螺旋桨与海冰相互作用的过程并获得冰力在艉部的分布情况,可为破冰船艉部振动响应分析提供可靠输入。
2)从计算结果看出,与螺旋桨空泡脉动压力(3~4 kPa)相比,船底表面所受的冰压力要大得多,因此仅以海冰撞击船底引起的表面力作为激振力是合理的。
3)在海冰与螺旋桨流场耦合过程中,发现在冰-桨作用区域,每个计算网格中至少存在10个以上的流场数据点,可对各网格内的流场信息进行求和平均,最后通过网格编号建立起颗粒与流场速度信息间的关系,将流场速度信息赋予海冰离散元模型中。
4)对于海冰离散元模型与水动力学的耦合,可进一步考虑波浪作用下海冰的破碎、堆积情况,以模拟海冰周围更加真实的海洋环境,提升结构冰荷载预测的精度。