重型自卸车防侧翻模型预测控制研究
2022-07-18廖子文宫爱红胡明茂
廖子文,宫爱红,胡明茂
(湖北汽车工业学院 机械工程学院,湖北十堰 442002)
统计数据表明,汽车侧翻事故仅占重型卡车事故的8%至12%,但是造成的损失却占全部重型货车事故损失的60%左右[1],这已成为除汽车碰撞外危害社会、财产安全的第二大因素,其带来的损失也不言而喻[2]。与其他车辆相比,重型自卸车由于其质量大、重心高的特点,更易发生侧翻事故[3]。国内外学者针对提高车辆侧翻稳定性以及其它有关性能进行了研究。赵伟等[4]通过建立的二自由度参考模型,研究了差动制动与主动转向两种控制方式;张宝珍等[5]针对SUV车辆提出了后轮脉冲主动转向系统,运用Carsim和Simulink联合仿真验证了系统的可行性;宗长富等[6]设计了动态的横向载荷转移率阈值,运用PID控制策略及差动制动的控制方法在不同工况下进行客车的侧翻仿真控制;陈松等[7]利用线性二次型最优控制理论设计了控制器,并采用微粒子群优化算法对控制器的权系数进行了优化;乔宝山等[8]建立了含Dugoff轮胎模型的8自由度整车动力学模型,设计了基于差动制动和差动驱动的综合控制器;欧健等[9]基于不变集理论,对半挂车模型、驾驶员行为不确定性等的非线性特性问题进行了研究;Li等[10]设计了一种三维动态稳定性控制器,通过上下级两部分控制模块实现对车辆的侧翻控制;Li等[11]建立了轮胎的纵向和侧向力的表达式,对越野车的八自由度模型与主动悬架控制进行了研究。
上述研究大部分用了PID与LQC的控制方法,这类方法无法对控制系统添加约束,就会导致控制动作不受约束,控制器容易达到饱和状态,同时因为环境因素以及状态参数的影响,设计的理论模型与实际模型存在较大的偏差,控制效果并不理想。而MPC控制方法能克服这种模型误差带来的影响,通过不断的滚动优化校正偏差,提高预测的准确性。因此本文采用模型预测控制的方法设计重型自卸车的主动防侧翻控制器,并基于MATLAB/Simulink与TruckSim联合仿真在两种典型工况下进行仿真验证。
1 重型自卸车动力学建模
以重型自卸车为研究对象,构建行驶过程中的车辆动力学模型。考虑型自卸车簧载质量占比大,且质心位置较高,忽略车辆的垂向、纵向运动,考虑整车的侧向、横摆、车身侧倾的3个自由度,所建模型如图1所示。

图1 三自由度自卸车模型
侧向运动方程为
(1)
横摆运动方程为
(2)
侧倾运动方程为
(3)
式中:m为整车质量;ms为簧载质量;ux为自卸车的纵向速度;β为质心侧偏角;γ为横摆角速度;φs为车身侧倾角;δ为前轮转角;hs为侧倾臂长;a、b为质心距前后轴长度;Ix、Iz为整车质量绕X、Z轴的转动惯量;kf、kr为前、后悬架的等效侧倾刚度;cf、cr为前、后悬架的等效侧倾阻尼;Ff、Fr为前、后轮所承受的侧向力;g为重力加速度。
考虑整车侧倾特性,忽略道路环境、轮胎的侧倾变形等因素,则前后轮所承受的侧向力及侧偏角为:
(4)
式中:ktf、ktr为前、后轮的等效侧偏刚度;βf、βr为前、后轮的侧偏角。
2 重型自卸车防侧翻控制策略
基于MPC的重型自卸车防侧翻控制策略流程如图2所示。
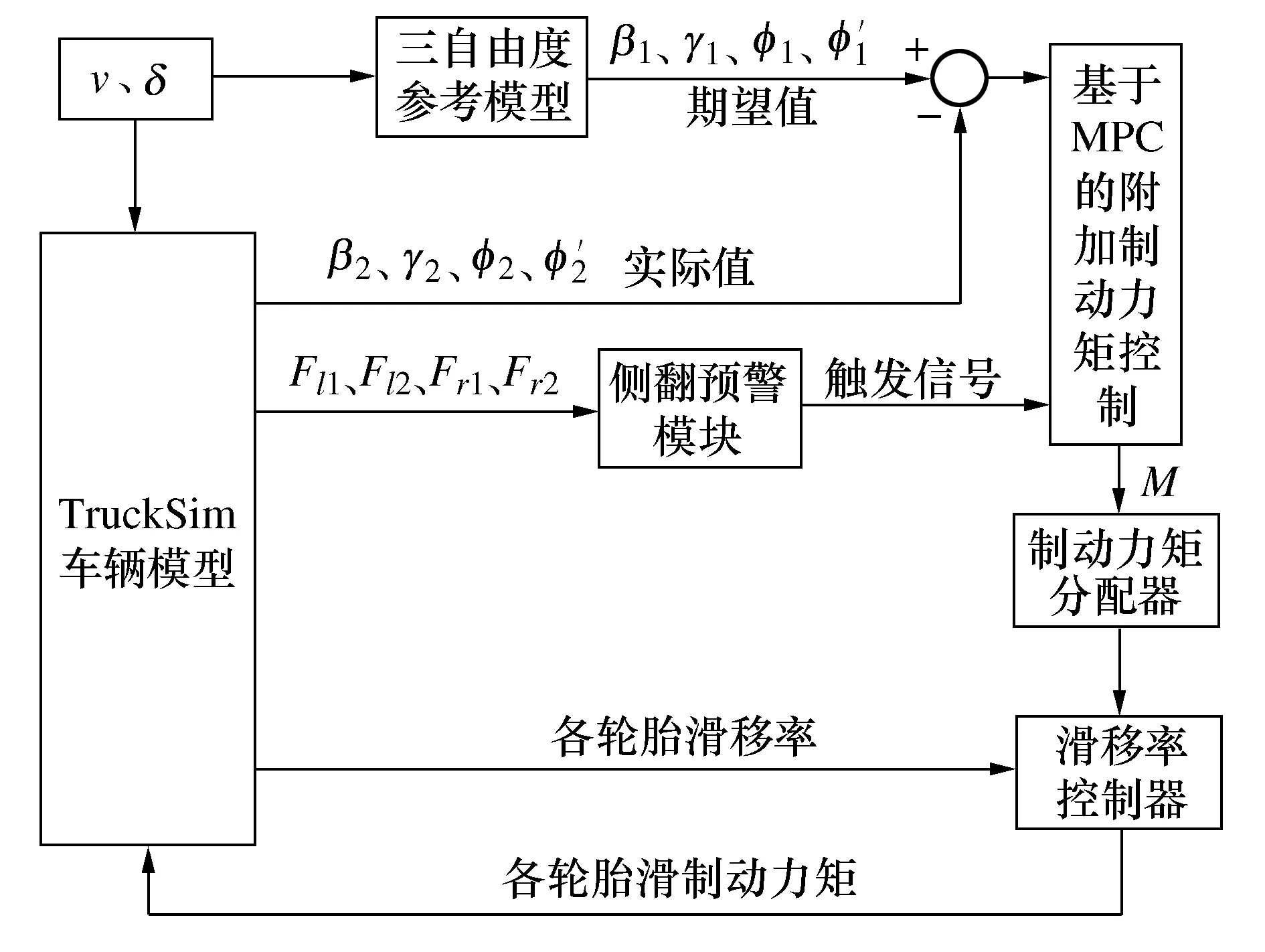
图2 防侧翻控制策略流程图
首先由三自由度车辆模型获取车辆质心侧偏角、横摆角速度、侧倾角与侧倾角速度作为当前的期望参考值;再与TruckSim输出的实际车辆的4个状态值相减,作为两者的状态偏差;通过建立的预警模块决定是否触发MPC控制器;其次,将状态偏差作为MPC控制器的输入,决策出重型自卸车的附加横摆稳定力矩,并根据制动力矩分配器,将附加力矩分配到各车轮;最后,为控制在差动制动环节中出现的轮胎抱死现象,建立滑移率控制器抑制力矩的作动效果。
2.1 侧翻预警及滑移率控制
为了防止MPC控制器一直处于激活状态,以横向载荷转移率(Lateral-load transfer ratio,LTR)作为侧翻门槛值。
(5)
式中:Fli、Fri分别表示左、右车轮上的垂直载荷;n、p分别表示车轴的数量及位置。当LTR=0时自卸车无侧倾;当LTR=1时左或右车轮离地,自卸车侧倾。重型自卸车以LTR作为侧翻门槛值时,范围在0.7~0.9[12]之间,本文选取的门槛值为0.8。
为了防止车辆出现车轮抱死而导致转向失控、侧滑等危险工况,需在进行差动制动侧翻控制的同时结合防抱死制动系统(Anti-lock braking system,ABS)共同作用[13]。以滑移率作为控制目标,将其保持在0.18~0.22之间[14],当某一车轮的滑移率低于0.18时,施加制动;当某一车轮的滑移率高于0.22时,取消对此轮的制动,本文选取的滑移率指标值为0.2。
2.2 MPC控制器设计
(6)
其中:
由于受到外界环境因素的干扰,以及车身非线性特性的影响,计算的质心侧偏角与横摆角速度期望值与实际值存在偏差,需要增加一个横摆稳定力矩M实现对重型自卸车质心侧偏角及横摆角速度的调整,使其趋于期望值。因此通过控制器决策出需施加横摆稳定力矩的大小,通过制动力矩分配器分配到各车轮上,达到对车辆侧翻稳定性的有效控制。
在此,实际车辆简化动力学方程为:
(7)

将式(7)减去式(6),得到MPC控制系统的状态空间方程为
(8)
系统输出方程为
(9)
其中:

将式(8)、式(9)离散化得到:
(10)

x(k+1)=Aex(k)+Beu(k)
(11)
⋮
(12)

则k+Np时刻的预测输出方程为
(13)
则控制系统的预测输出方程可定义为
(14)
其中:


为了使自卸车的实际质心侧偏角、横摆角速度以及车身侧倾角跟上期望值,将目标函数设置为
式中:Yref(k+1)为参考序列;Q、R为权重矩阵;‖U(k)‖2的作用是防止自卸车失稳,使控制动作不要过大;p为权重矩阵;ε为松弛因子,确保每次优化都能得到可行解。
在控制中,需对系统输出添加以下约束:
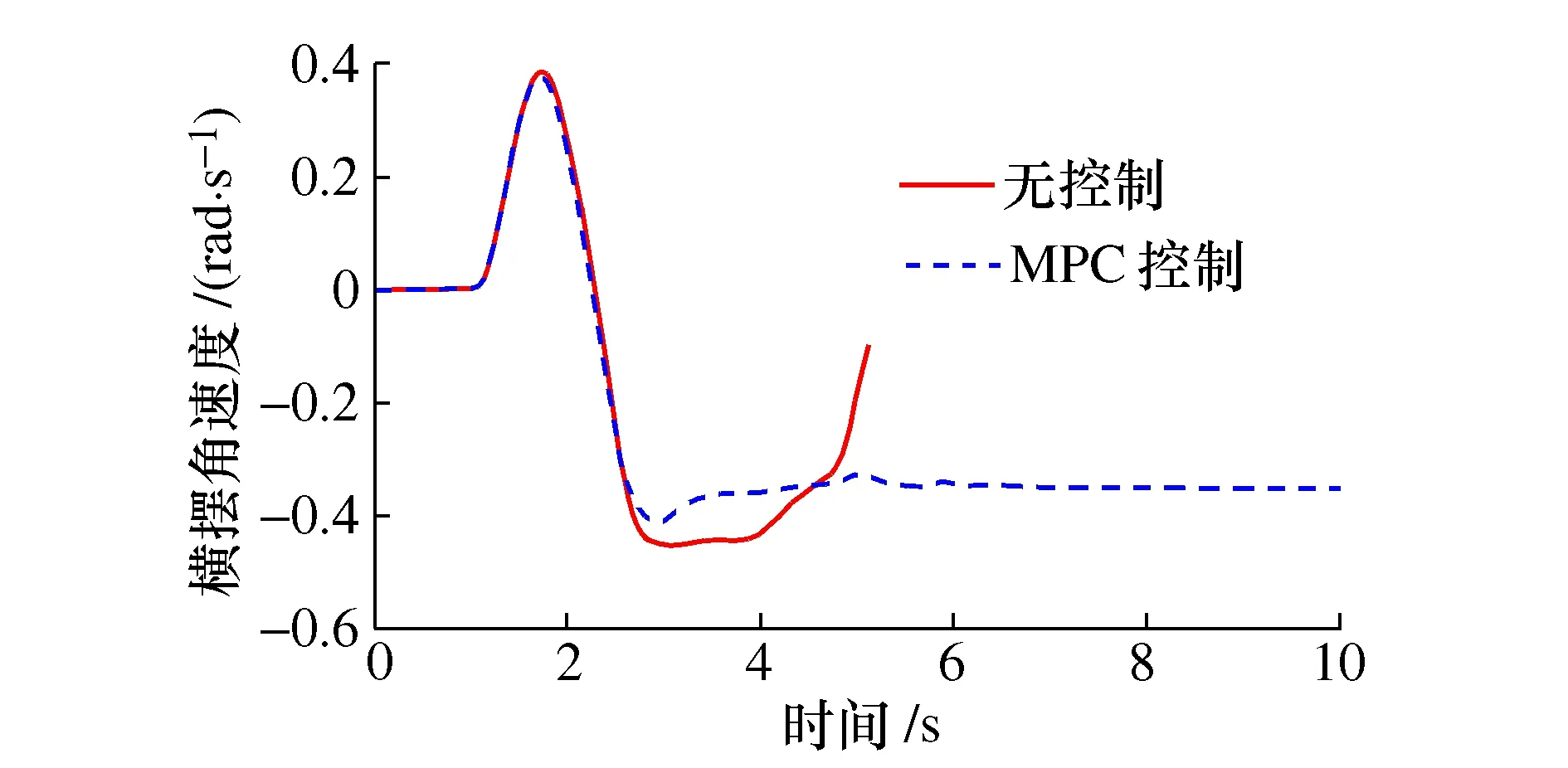
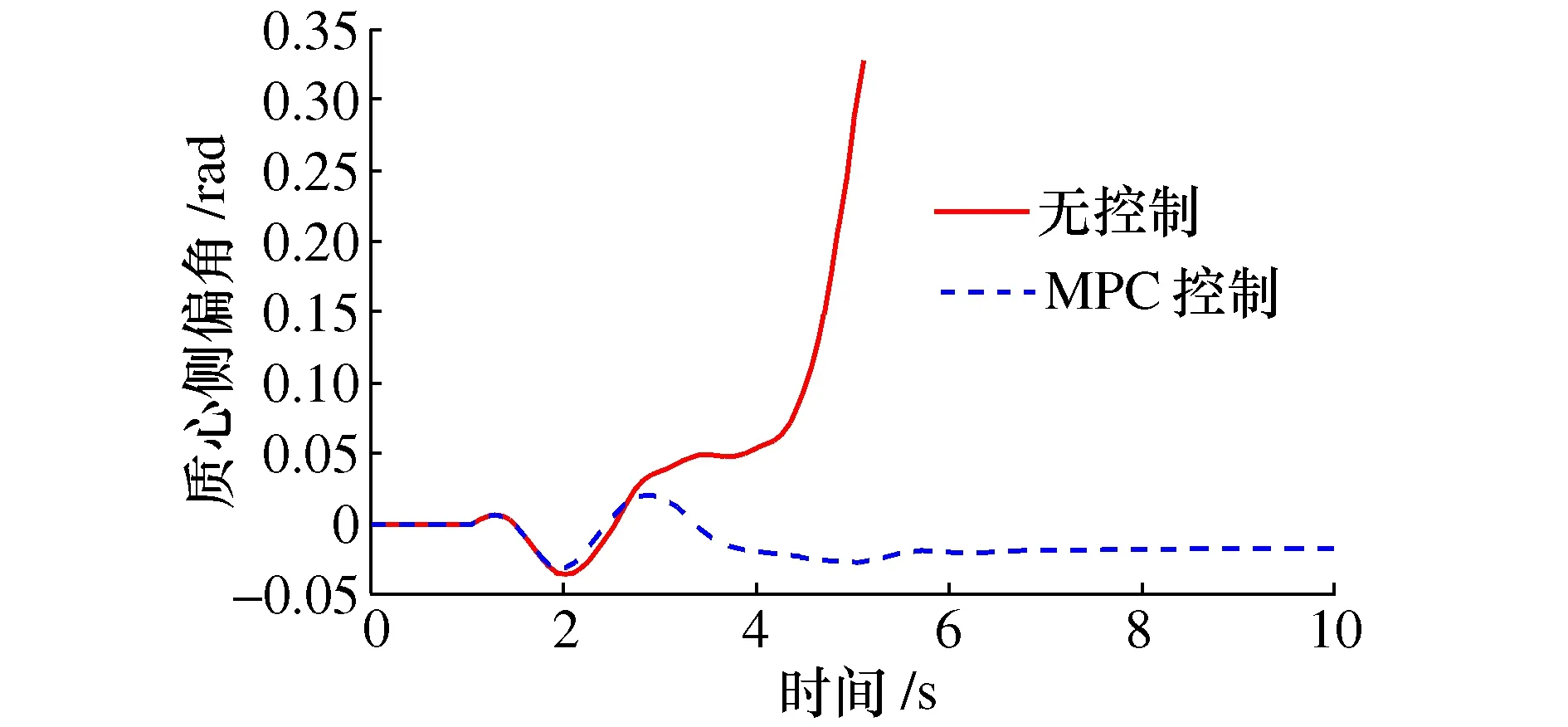
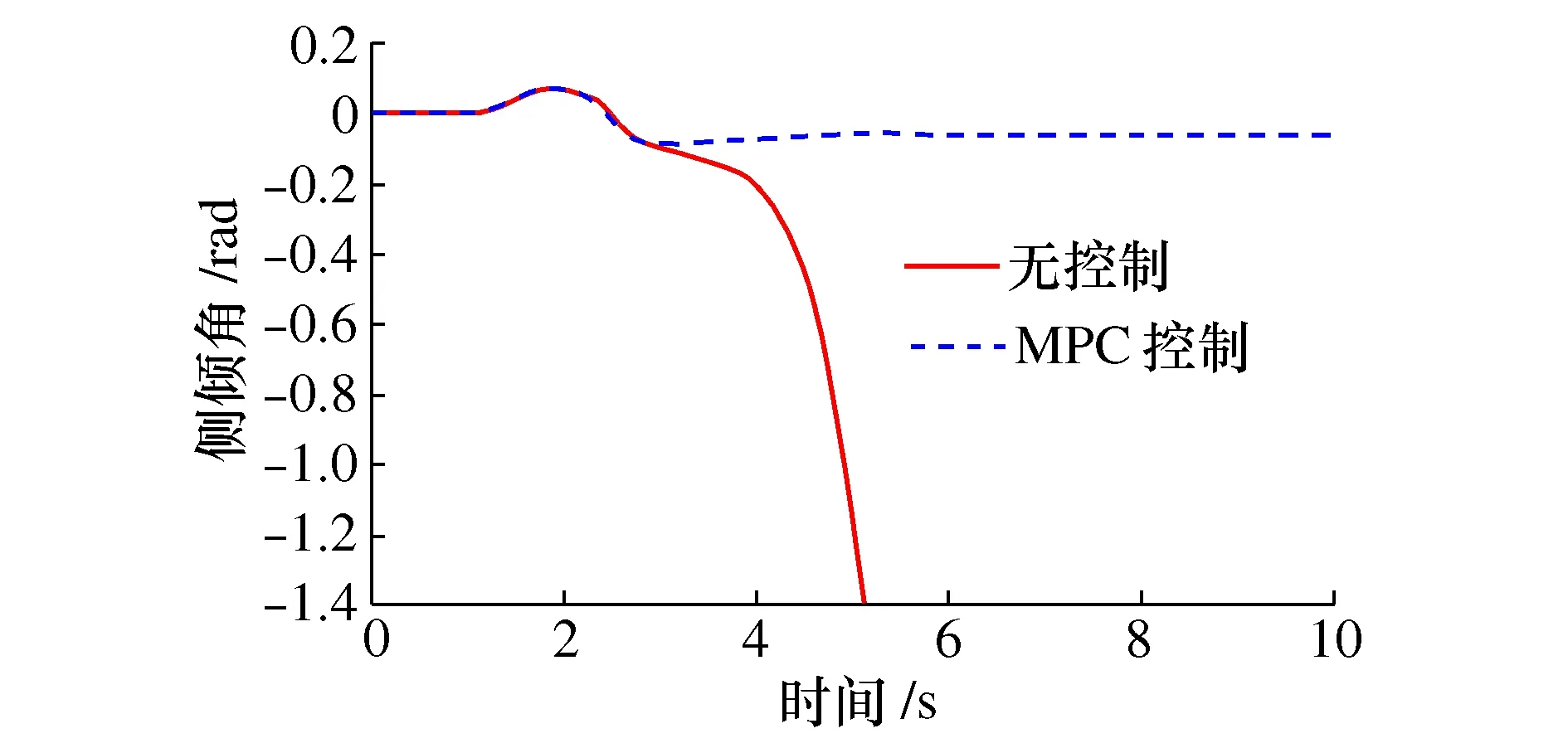
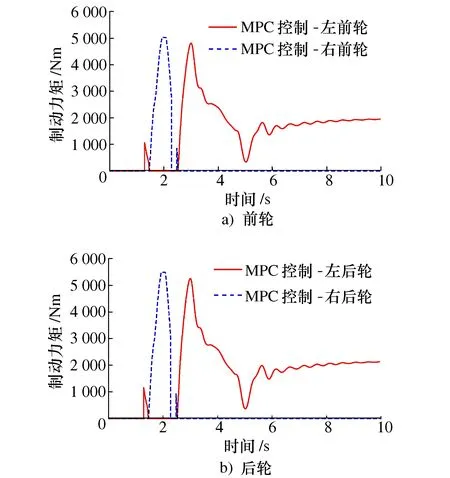
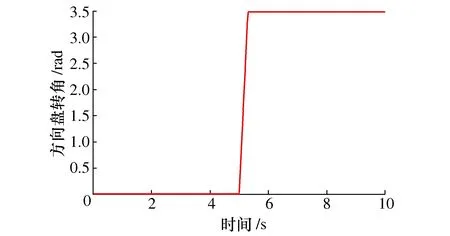
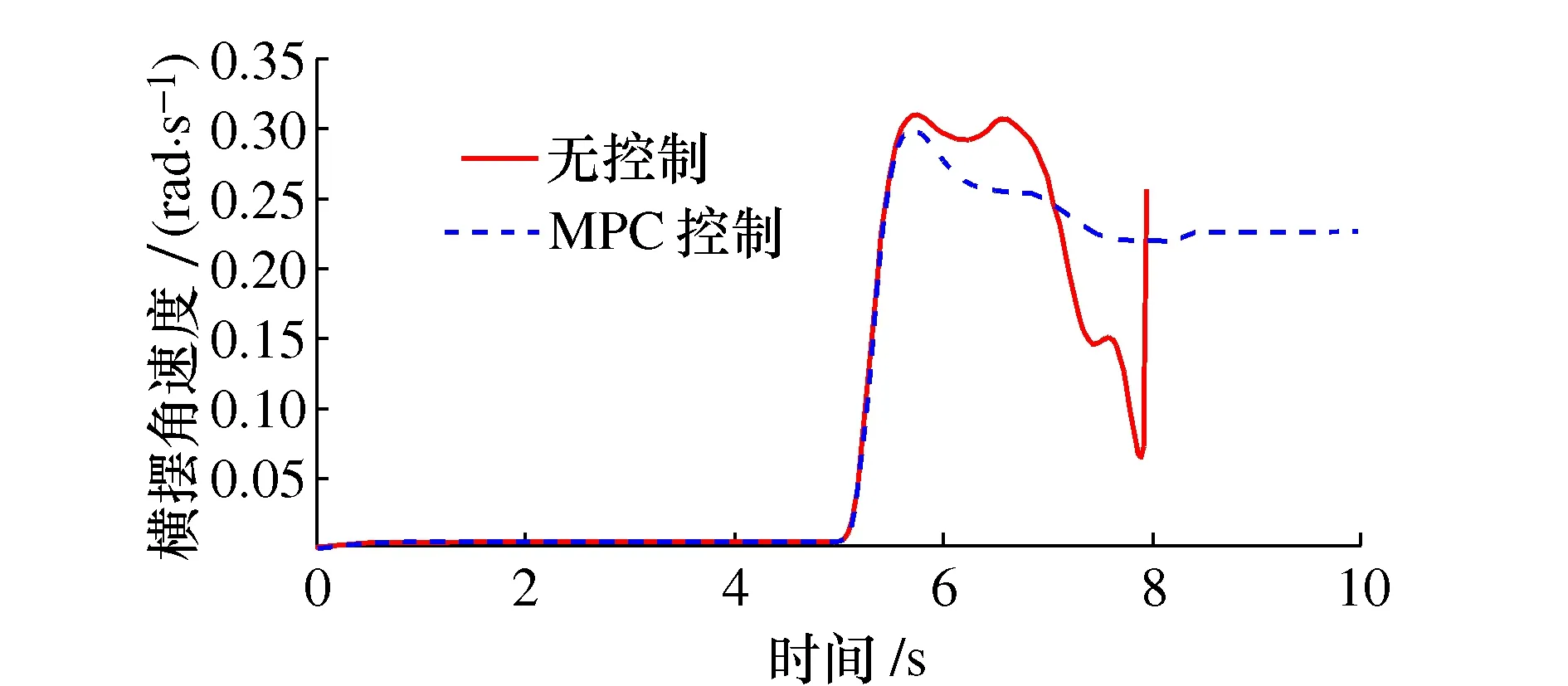
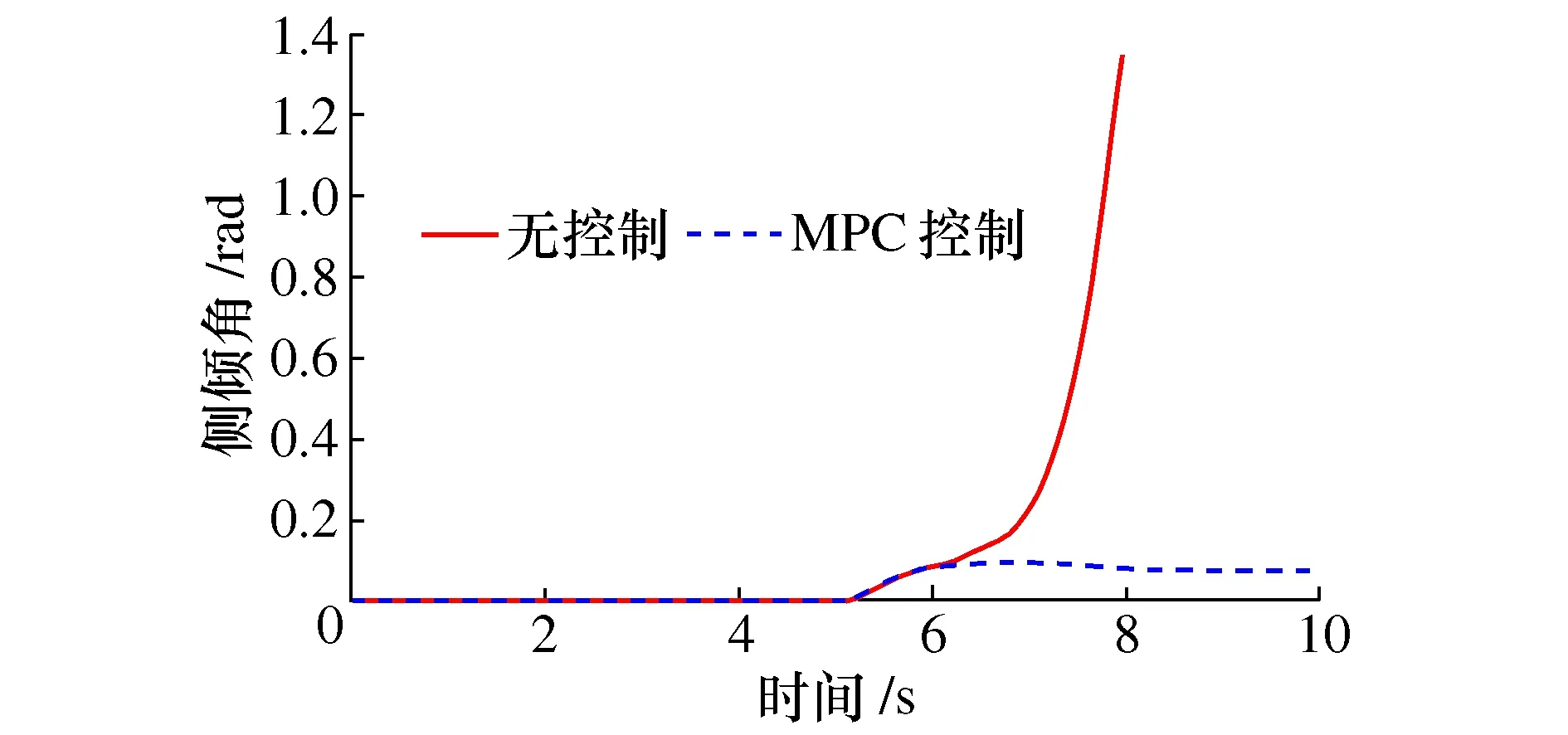
ymin(k+i) i=1,2,…,NP (16) 将式(16)代入式(15)中,使求最小目标优化问题转化为二次规划问题,利用MATLAB进行求解。 通过差动制动方式控制相应车轮制动,抵消带来不稳定状态的横摆力矩,从而提高车辆的侧倾稳定性,防止车辆侧翻[15]。当制动对象为重型车辆时,采取单侧车轮制动的方式有利于将总制动力更加均匀的分配给各车轮,能够有效避免因制动力过于集中,造成目标车轮抱死。故本文选取单侧车轮制动法,方案如表1所示。 表1 制动车轮选取方案 制动力矩分配方程如下: (17) 式中:R为车轮半径;Ti为车轮分配的制动力矩。 为验证基于MPC的附加力矩控制系统的有效性,在MATLAB/Simulink中搭建控制系统模型,在TruckSim中搭建重型自卸车模型,采用联合仿真的形式验证鱼钩工况和阶跃工况下的自卸车侧翻稳定性。 鱼钩工况下的方向盘转角输入如图3所示,最大转角约为5.2 rad,经历了两次大幅度回转运动。试验时选用干沥青路面附着系数为0.8,自卸车主要参数整车质量为11 200 kg、簧载质量1 200 kg、车速为50 km/h,仿真步长为10 s。 图3 鱼钩工况方向盘转角输入 图4~图6为有控制系统与无控制系统作用的自卸车参数对比。图4表示为横摆角速度的变化状况,无制动处理下的横摆角速度最高达到了0.45 rad/s,之后车辆发生侧翻;而在加入MPC控制器的作用下,横摆角速度在鱼钩工况下的两次急转后最终趋于稳定,车辆保持了侧翻稳定状态。图5表示为质心侧偏角的变化状态,无制动处理下的质心侧偏角在两次急转后于2.1 s开始急剧上升,在4.5 s时达到峰值0.33 rad,表明车辆处于失稳状态;而加载控制器后的质心侧偏角在两次波动后趋于稳定值-0.02 rad,车辆处于稳定状态。图6表示为侧倾角的变化状态,明显的表现了无控制状态下的侧倾角在第二次回转运动后急剧增大,车辆失稳;而处于控制作用的侧倾角曲线平缓并趋于稳值,表明了车辆的侧翻稳定性。 图4 鱼钩工况下横摆角速度 图5 鱼钩工况下质心侧偏角 图6 鱼钩工况下侧倾角 图7为控制下的前后轴轮胎制动力矩分配图。如图7a)所示,自卸车在第2 s做出急速左转运动后时,控制系统根据决策结果对右前轮施加了近5 000 Nm的控制力矩以降低侧翻趋势;在第3 s做出急速右转运动后时,对左前轮施以近4 800 Nm的控制力矩以降低侧翻风险,之后在预警模块与滑移率控制模块的作用下,控制器持续工作,对左前轮持续施加约2 000 Nm的控制力矩,最终使车辆处于稳定状态。图7b)表示了后轴的制动力矩分配过程,与图7a)趋势一致,最终使车辆趋于稳定状态。 图7 轮胎制动力矩 阶跃工况用以实现对车辆在高速情形下规避障碍的仿真。如图8所示,车辆行驶至5 s左右时,开始紧急左转运动,方向盘转角达到3.5 rad。试验时选用干沥青路面附着系数为0.8,车速为80 km/h,仿真步长为10 s。 图8 阶跃工况方向盘转角输入 图9表示了横摆角速度的变化状况,无制动处理下的自卸车在横摆角速度达到最大值0.31 rad/s后发生侧翻;而加了控制系统作用的横摆角速度在达到峰值后因为对车轮施加了力矩的效果,横摆角速度先有所下降后趋于稳定。图10表示了质心侧偏角的变化状况,无制动处理下的质心侧偏角在车辆急转后急剧增加,在约8 s时达到峰值,表明了车辆的失稳状态;而加了控制器的质心侧偏角在急转后先增加,之后在控制器的作用下有所回调并趋于稳定,数值接近0。图11表示了侧倾角的变化状态,曲线趋势与图10相似,方向相反,也是在控制系统的作用后趋于稳定。 图9 阶跃工况下横摆角速度 图10 阶跃工况下质心侧偏角 图11 阶跃工况下侧倾角 图12为控制下的前后轴轮胎制动力矩分配图。不同于鱼钩工况,阶跃工况只进行一次急速转向运动。如图12a)所示,自卸车在第6.5 s做出急速左转运动后时,控制系统根据决策结果对右前轮施加了近4 000 Nm的控制力拒以降低侧翻趋势,之后为保持车辆稳定性系统持续输出,最终使车辆处于稳定状态。图12b)表示了后轴的制动力矩分配过程,与图12a)趋势一致,最终使车辆趋于稳定状态。 图12 阶跃工况下轮胎制动力矩 针对重型自卸车行驶中易发生侧翻、失稳等问题,提出了一种基于MPC的防侧翻控制策略,通过搭建三自由度车辆动力学模型,以质心侧偏角、横摆角速度、侧倾角及侧倾角速度为状态输入,使实际值逼近期望值,运用差动制动的控制方法使车辆保持稳定状态。运用MATLAB/Simulink与TruckSim对两种工况进行联合仿真,结果表明了基于MPC的附加力矩控制系统能极大地提升重型自卸车稳定性,降低侧翻风险,验证了模型的准确性与有效性。2.3 制动力矩分配

3 仿真分析
3.1 鱼钩工况仿真试验

3.2 阶跃工况仿真试验


4 结论
