爬壁机器人固定/有限时间滑模轨迹跟踪控制研究
2022-07-18赖欣李嘉禾彭天宇张晨蕾王森
赖欣,李嘉禾,彭天宇,张晨蕾,王森
(西南石油大学 机电工程学院,成都 610500)
爬壁机器人作为一种能够用于极限作业的特种机器人,可以替代人类在高空垂直立面位置作业。现在爬壁机器人已经在多个行业尤其是建筑行业、消防业、核工业、石油化工业和制造业等行业得到了极为广泛的应用[1]。
随着爬壁机器人技术的发展,控制系统相当于爬壁机器人的“大脑”,决定着爬壁机器人的运动策略。爬壁机器人轨迹跟踪控制问题受到越来越多的关注。这主要是因为爬壁机器人作为一种受非完整约束的系统,其约束不可积,因而其镇定、控制及规划等问题变得较为困难与复杂[2]。同时,在实际系统中存在外干扰等不确定性因素,使得一些基于确定模型设计的控制律在实际应用中达不到预期效果。
针对非完整约束系统的轨迹跟踪方法研究,通常都希望能获得更快的系统收敛速度。随着现代控制理论的发展,滑模变结构控制作为一种典型的非线性控制方法能够有效改善机器人的稳定性和操纵性,从而提高执行任务的能力[3]。滑模变结构控制算法简单、对外部干扰不敏感、系统响应速度快、物理实现容易[4]。因此近年来,一些研究者采用自适应滑模控制方法进行轨迹跟踪研究[5-7],并取得了一定的成效。所以研究爬壁机器人运动系统的滑模变结构控制方法具有十分重要的意义。现有的轨迹跟踪控制器误差收敛通常采用指数趋近律、等速趋近律、幂次趋近律[8],这些都属于无限时间收敛,也就是需要在时间趋于无限的条件下才能跟踪上期望轨迹。而有限/固定时间滑模控制在解决系统不确定性和外部扰动方面被认为是一个有效的鲁棒控制方法,并且终端滑模控制[9]能够保证有限时间收敛。有限/固定时间滑模控制方法具有算法简单、响应速度快、对外界噪声干扰和参数摄动鲁棒性强等优点。因此本文设计了收敛时间有限的轨迹控制器,使爬壁机器人可以在有限时间内跟踪上期望轨迹;在有限时间控制器的基础上又设计了一种系统收敛时间与系统初始状态无关,只和控制器参数设计有关的固定时间控制器。本文首先建立爬壁机器人的运动学方程,设计了一种双闭环控制回路,将整体系统分为外环的位置系统和内环的姿态系统,分别设计了爬壁机器人角速度与线速度的有限/固定时间滑模控制器,控制爬壁机器人实现对期望轨迹的跟踪。
1 运动模型建立
运动学模型是爬壁机器人完成轨迹跟踪作业的基础理论依据。爬壁机器人跟踪期望轨迹的运动在数学上可表示为关于坐标轴的函数。爬壁机器人的角速度、线速度等变化都可以化解为对于时间高阶微分形式。我们需要建立运动学方程来描述机器人内部变量与时间之间的对应关系式。
本文设计的机器人采用四轮驱动方式,由4个独立的驱动电机驱动。靠着内侧轮和外侧轮之间的电机转速差实现机器人的转弯运动。首先在二维平面坐标系中建立以O为原点的笛卡尔坐标系XOY。
图1中以轮式爬壁机器人运动方向建立横向轴X0以及纵向轴Y0,以爬壁机器人的质量中心O0为坐标原点,建立随爬壁机器人一同运动的参考坐标系X0O0Y0,假设爬壁机器人的几何中心与质心重合。其中:θ为机器人前进方向与X轴之间的夹角;θr为爬壁机器人运动到某一时刻时的航向角;vc为爬壁机器人前进的线速度;ω为机器人的角速度,则爬壁机器人在笛卡尔坐标系中的位姿为q=[X(0),Y(0),θ]T,而qr=[X(r),Y(r),θr]T表示为机器人运动期望位姿。
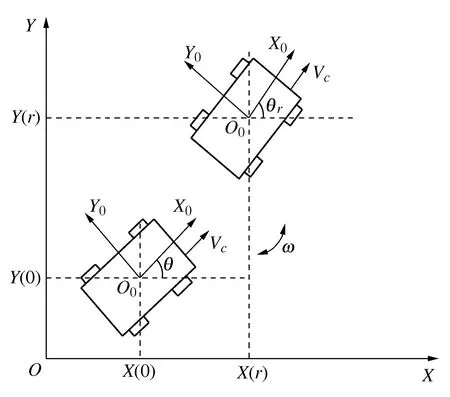
图1 爬壁机器人运动学模型
根据上述设定,假设P=[vc,ω]T作为爬壁机器人的控制输入,可以求得爬壁机器人的运动学方程公式为:
(1)
式中:vX为vc在X轴上的分量;vY为vc在Y轴上的分量。将式(1)化为矩阵形态有
(2)
根据Campion等论述[10],任何轮式移动机器人都可以采用两个自由度特征值δm和δs表示。其中δm表示为空间自由度,也就是爬壁机器人工作的空间维度,本次设计的δm=2;δs表示为驱动自由度,是轮式机器人可独立改变运动方向的驱动轮数目,由于此次爬壁机器人采用差速转向模式,所以δs=0。综上,本次设计的爬壁机器人自由度特征值组合为 [δmδs]=[2 0]。对应的特征量组合的轮式爬壁机器人状态方程表示为[11-12]
(3)
这里的η1对应的是vc;η2对应为ω。以此类推,不难求得期望位姿的状态方程为
(4)
设qe为位姿误差,根据参考坐标系和全局坐标系之间的变化关系可以得出
(5)
对式(5)两边同时求微分,并代入式(2)、式(4)中可以得到爬壁机器人的位姿误差状态方程为
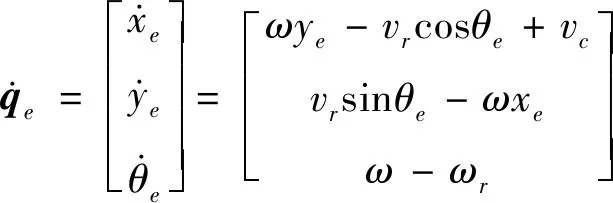
(6)
设计的控制器需要控制电机输出合适的驱动力来控制爬壁机器人运动位姿收敛于期望点,因此当时间趋于无穷时,位姿误差向量qe的范数收敛于0[13],即
(7)
2 控制器设计
为了提高轨迹跟踪的精确度,本文提出一种双闭环滑模控制方法,基于前面运动学模型中得到误差微分方程,以Lyapunov稳定性为基础结合固定时间/有限时间收敛理论,利用反演法思想反推控制函数得到控制需要的线速度以及角速度,并验证系统的稳定性和收敛性,实现准确跟踪期望轨迹。
在前面运动学方程中提到,本次设计的爬壁机器人为2自由度系统,输出存在3个变量:[x,y,θ]。本次设计选择将爬壁机器人的位置坐标 (x,y) 为主动跟踪,航向角θ为从动跟踪[14],设计的双闭环系统结构如图2所示。该闭环路径跟踪系统由内外环组成:外环为位置子系统,内环为姿态子系统;通过外环控制器完成对爬壁机器人位置坐标 (x,y) 的跟踪,同时位置子系统控制器输出一个中间指令信号θr传递给内环的姿态子系统控制器;内环通过姿态控制器实现对这个中间指令信号的跟踪。

图2 双闭环路径跟踪控制流程图
3 滑模控制
针对一阶非线性系统状态方程为

(8)
则在其状态空间中存在一个超平面s(x),将整个状态空间分割为s>0,s<0和s=0这3个部分。其中s=0被称为滑模切换面,当系统内所有的运动点到达这个面时,必定满足

(9)
式(9)的存在为Lyapunov函数渐进稳定性提供了必要条件:存在一个Lyapunov函数v(x)=s2(x),在s=0的滑模切换面附近v为一个非增函数。当s(x)→∞,必有v(x)→∞,因此可以得出该系统渐进稳定。滑模设计律的方法为如下几步:首先,根据给定系统状态设计可以满足快速收敛且具有良好动态品质的滑模切换面;其次,设计滑模控制趋近律,辅助切换函数快速收敛;再次,结合切换函数以及滑模趋近律推导出滑模控制率;最后,验证系统的稳定性和收敛性。
3.1 固定/有限时间稳定理论
系统的稳定性是系统本身的结构特性,指的是系统受到的小的扰动作用消除后,一定时间后被调量与规定量之间的偏差值的收敛性。稳定性一直是控制系统最重要的指标之一。除此之外,收敛性同样是评价控制系统好坏的重要指标。在早期的控制系统的设计过程中,指数收敛是所有闭环系统中最快的收敛方式。近段时间以来,非线性系统的有限时间控制发展迅速。当系统收敛时间逼近与系统初始状态的有界时间函数的上界时,系统状态能在有限时间内收敛到平衡点。下面将给出固定/有限时间稳定性描述[15-16]。
有限时间稳定 对于类似于式(8)的非线性系统,如果系统的收敛时间T(x0)可以用一个关于系统初始状态的有界函数表示,则式(8)这样的非线性系统具有有限时间稳定的平衡态。
引理1 全局有限时间稳定
针对如下系统
(10)
如果存在一个正定函数V(x),且该函数满足

(11)
其中b>0,0<λ<1为系统参数,则系统(10)满足全局有限时间稳定,且收敛时间为
(12)
固定时间稳定 对于式(8)所示的非线性系统,如果该系统的收敛时间T全局有界并且为一个不依赖系统初始状态的常数,则称该非线性系统具有固定时间稳定的平衡态。
引理2 全局固定时间稳定
针对系统(10),如果存在一个正定函数v(x),如果该函数满足
(13)
其中a>0,b>0,1<λ1<2,0<λ2<1为系统参数,且λ1+λ2=2,则系统(8)满足全局固定时间稳定,其收敛时间满足
(14)
3.2 有限时间滑模控制器设计
爬壁机器人的运动学模型为:
(15)
在运动学模型(15)中,其中位置子系统模型为:
(16)
首先假设两个虚拟控制器vc,x,vc,y分别为:
(17)
则式(16)可以简化为:
(18)
然后定义位置子系统误差和速度子系统误差方程为:
(19)
分别设计切换面和有限时间趋近律如下[17]:
(20)
式中:i=x,y,bi都为正数;0<λi<1。
然后利用Backstepping思想反步稳定性函数,设计控制器为
(21)
那么不仅可以保证位置子系统满足Lyapunov稳定,还能够保证其在有限时间内收敛到平衡态[18]。
1) 位置子系统稳定性和有限时间收敛特性分析
首先定义Lyapunov函数为

(22)
则
(23)
然后将式(20)代入式(23)中可得
(24)

根据式(17)可以求得实际的控制器vc和期望的姿态角θr为:
(25)
针对姿态子系统,即
(26)
定义状态误差及其微分方程为:
(27)
构造切换面和有限时间趋近律:
(28)
式中:aθ、bθ都为正数;0<λθ<1。
然后利用Backstepping思想反步稳定性函数,设计控制器为

(29)
那么不仅可以保证姿态子系统满足Lyapunov稳定,还能够保证其在有限时间内收敛到平衡态。
2) 姿态子系统稳定性和有限时间收敛特性分析
定义Lyapunov函数为
(30)
则有
(31)

(32)

3.3 固定时间滑模控制器设计
位置子系统误差和速度子系统误差方程为式(19),分别设计滑模切换面和固定时间趋近律如下:
(33)
式中:i=x,y,ai和bi都为正数;1<λi,1<2,0<λi,2<1,且λi,1+λi,2=2。
然后利用Backstepping思想反步稳定性函数,设计控制器。首先对式(33)求导得

(34)
将式(34)代入式(33)中可得控制器方程如下:
(35)
那么不仅可以保证位置子系统满足Lyapunov稳定,还能够保证其在固定时间内收敛到平衡态。
1) 位置子系统稳定性和固定时间收敛特性分析
首先将式(22)代入式(23)可得:
(36)

根据式(16)可以求得实际的控制器vc和期望的姿态角θr为:
(37)
针对姿态子系统,即
(38)
定义状态误差及其微分方程为:
(39)
构造切换面和固定时间趋近律:
(40)
式中:aθ、bθ都为正数;1<λθ,1<2,0<λθ,2<1,且λθ,1+λθ,2=2。
然后利用Backstepping思想反步稳定性函数,设计控制器为

(41)
那么不仅可以保证姿态子系统满足Lyapunov稳定,还能够保证其在固定时间内收敛到平衡态。
2) 姿态子系统稳定性和固定时间收敛特性分析
定义Lyapunov函数为

(42)
则有
(43)
(44)

以上是爬壁机器人轨迹跟踪控制器的设计,下面分别对直线、正弦、圆轨迹进行跟踪仿真。
3.4 轨迹跟踪仿真
仿真参数设置如下:
固定时间滑模控制参数设置为:
(45)
(46)
有限时间滑模控制参数设置为:
(47)
(48)
1) 跟踪直线轨迹
给定直线期望状态为:
(49)
爬壁机器人的初始状态为:
(50)
普通滑模、有限滑模、固定滑模跟踪直线的仿真结果如图3和图4所示,跟踪直线的线速度和角速度仿真如图5和图6所示。
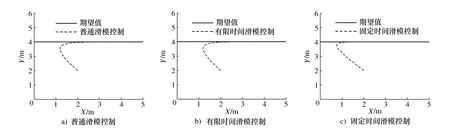
图3 跟踪直线轨迹

图4 跟踪直线误差图

图5 跟踪直线线速度
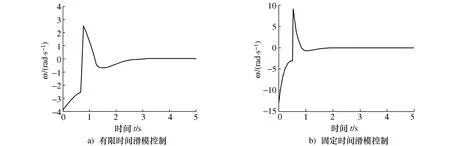
图6 跟踪直线角速度
结合下面仿真结果可以看出,普通滑模控制、有限时间滑模控制和固定时间滑模控制均能完成对爬壁机器人期望轨迹的跟踪。从同一起初位置跟踪轨迹的收敛速度从快到慢依次为:固定时间滑模控制,有限时间滑模控制,普通滑模控制。收敛时间分别为3 s、2 s和1 s;从对爬壁机器人位置状态x、y、z的跟踪误差曲线上来看,跟踪精度最高的为固定时间滑模控制,其次是有限时间滑模控制。但从跟踪直线角速度来看固定时间滑模控制的超调略微大于有限时间滑模控制。
2) 跟踪正弦轨迹
正弦曲线期望状态为:
(51)
爬壁机器人的初始状态为:
(52)
普通滑模、有限滑模、固定滑模跟踪正弦的仿真结果如图7和图8所示,跟踪正弦的线速度和角速度仿真如图9和图10所示。

图7 跟踪正弦轨迹
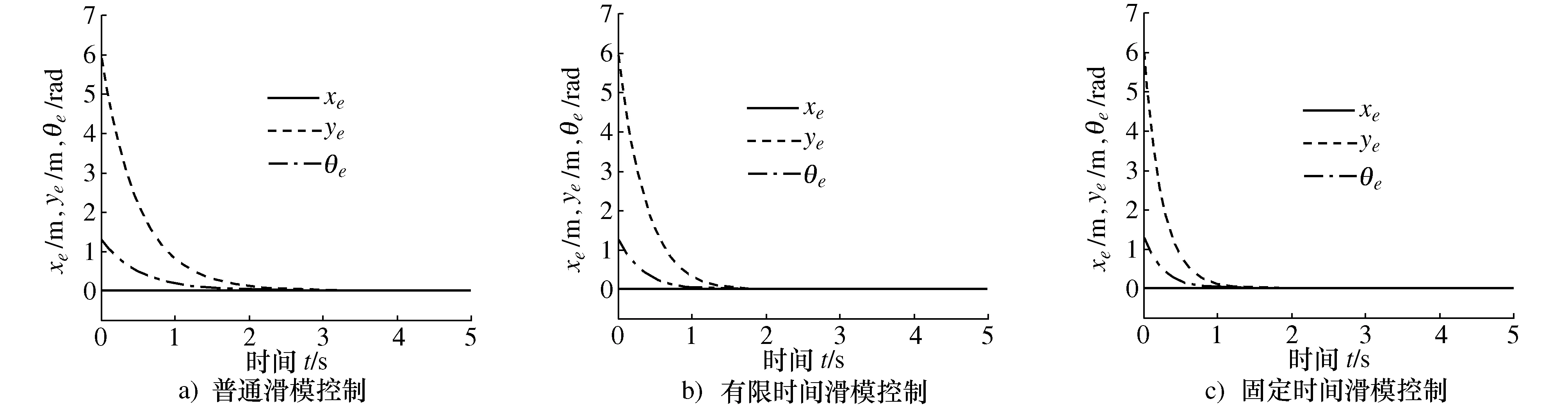
图8 跟踪正弦误差
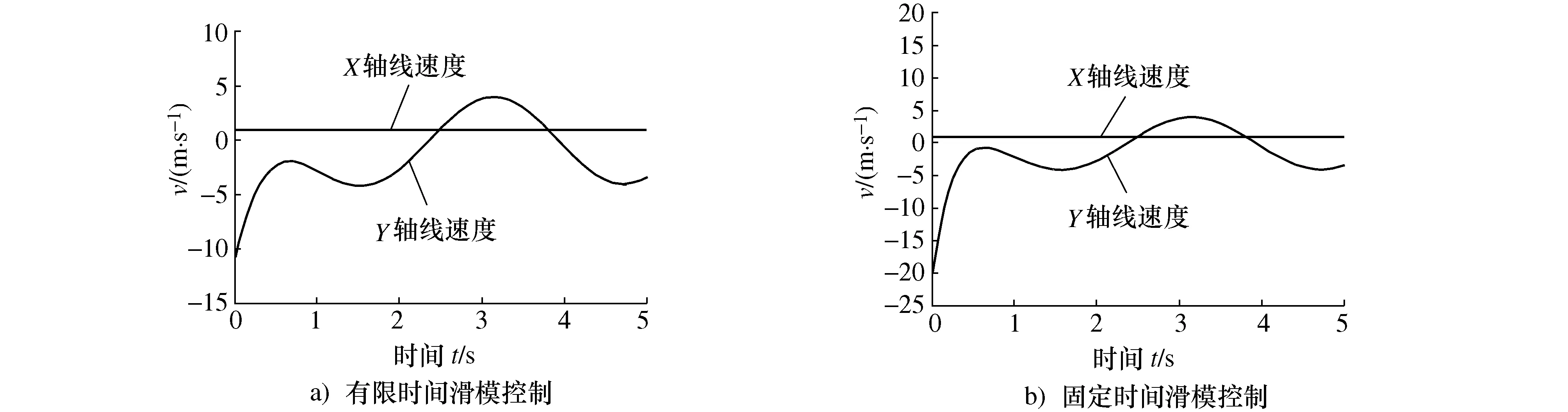
图9 跟踪正弦线速度
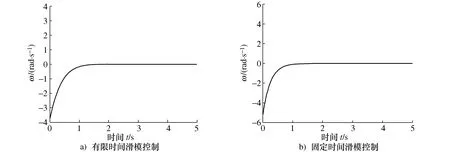
图10 跟踪正弦角速度
结合图7到图8来看,跟踪速度最快的依然是固定时间滑模控制法,其次是有限时间滑模控制和一般滑模控制;从跟踪误差收敛情况来看,固定时间滑模控制和有限时间滑模控制收敛速度明显比普通滑模控制更快收敛到0。
3) 跟踪圆轨迹
给定圆轨迹期望状态为:
(53)
爬壁机器人初始状态为:
(54)
普通滑模、有限滑模、固定滑模跟踪圆的仿真结果如图11和图12所示,跟踪圆的线速度和角速度仿真如图13和图14所示。
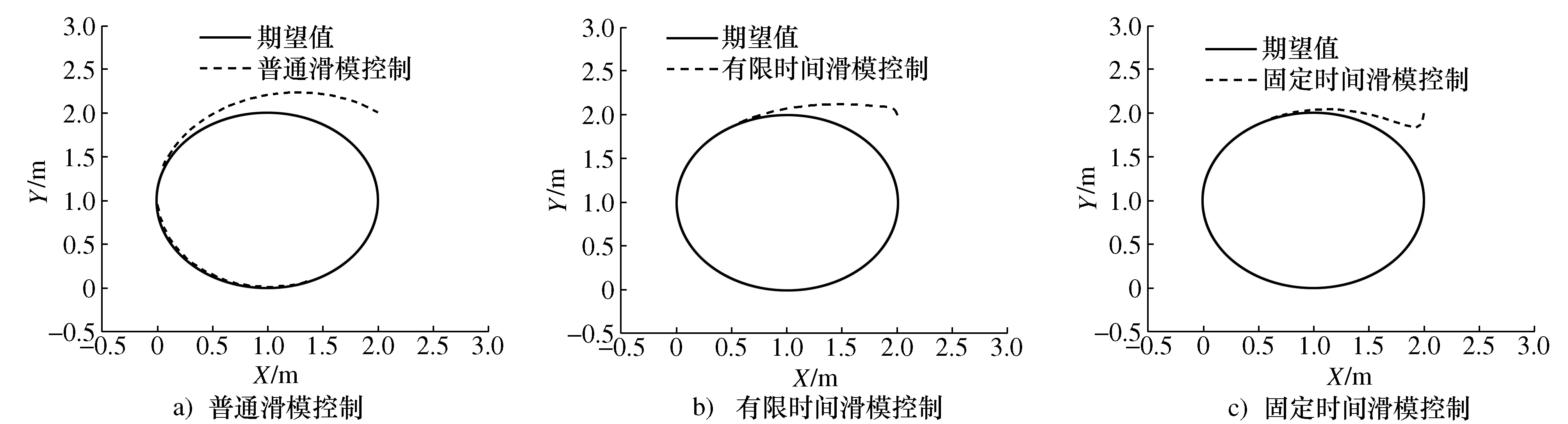
图11 跟踪圆轨迹图
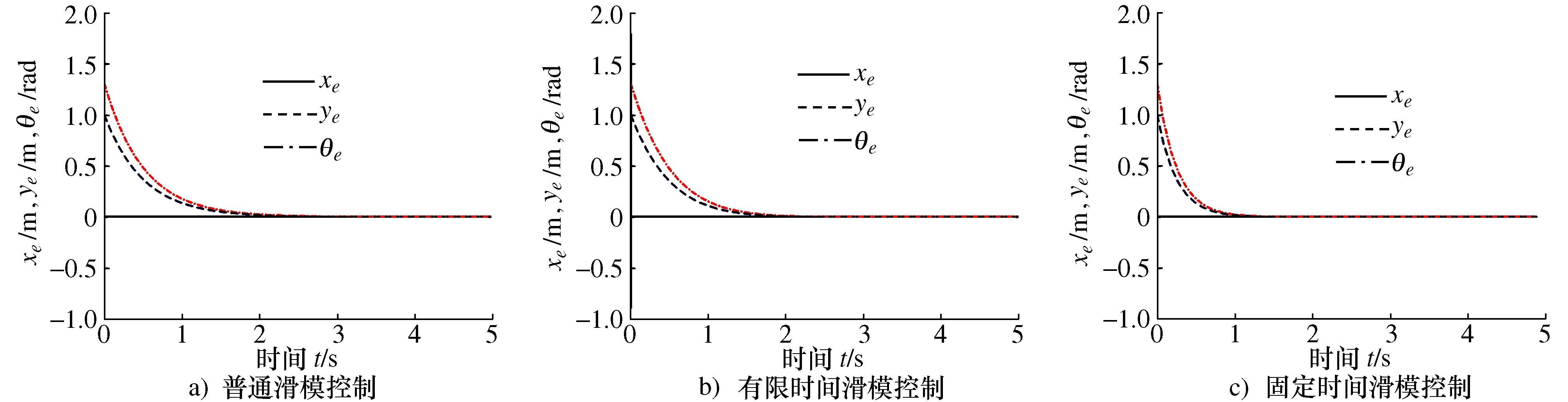
图12 跟踪圆误差
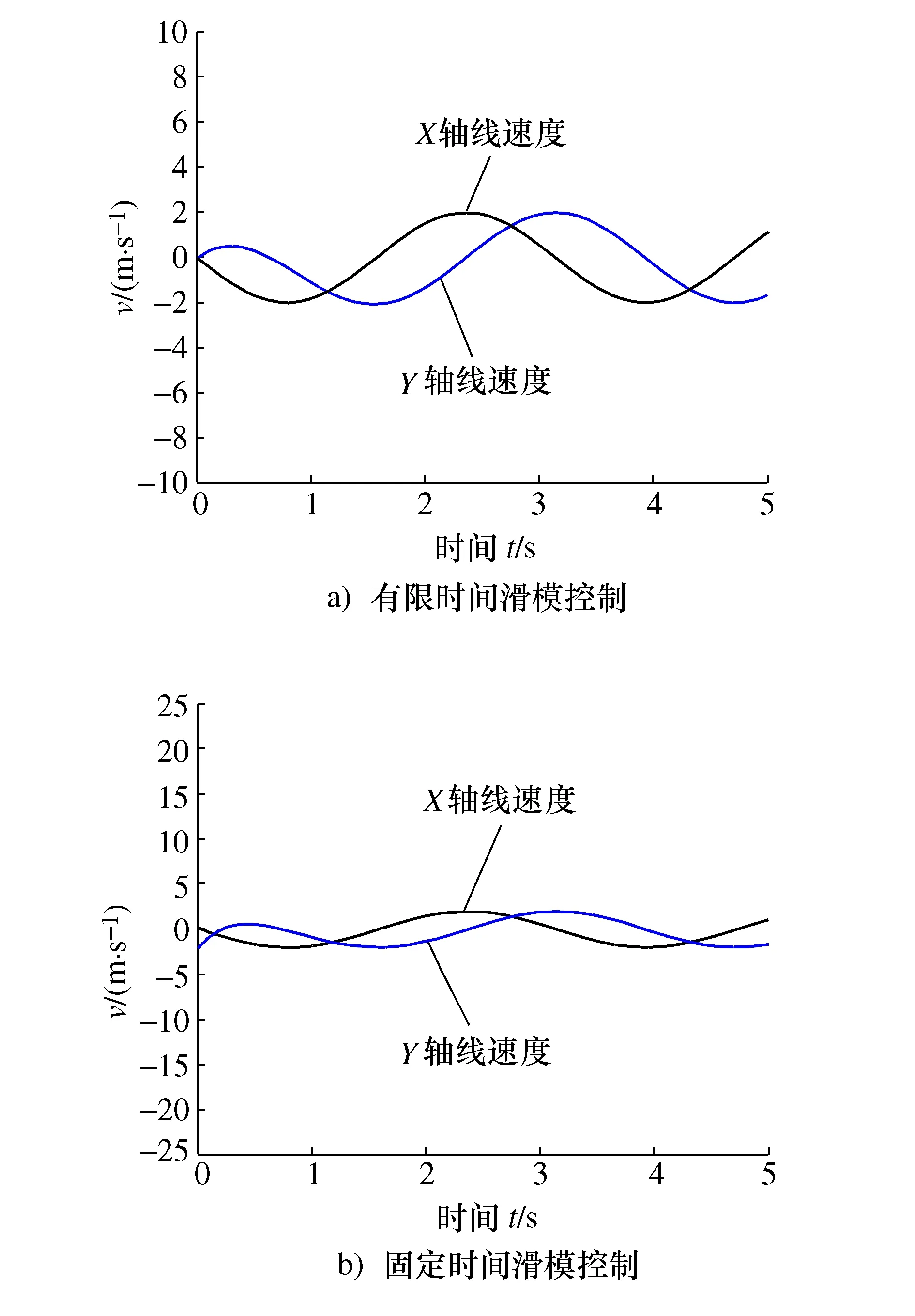
图13 跟踪圆线速度
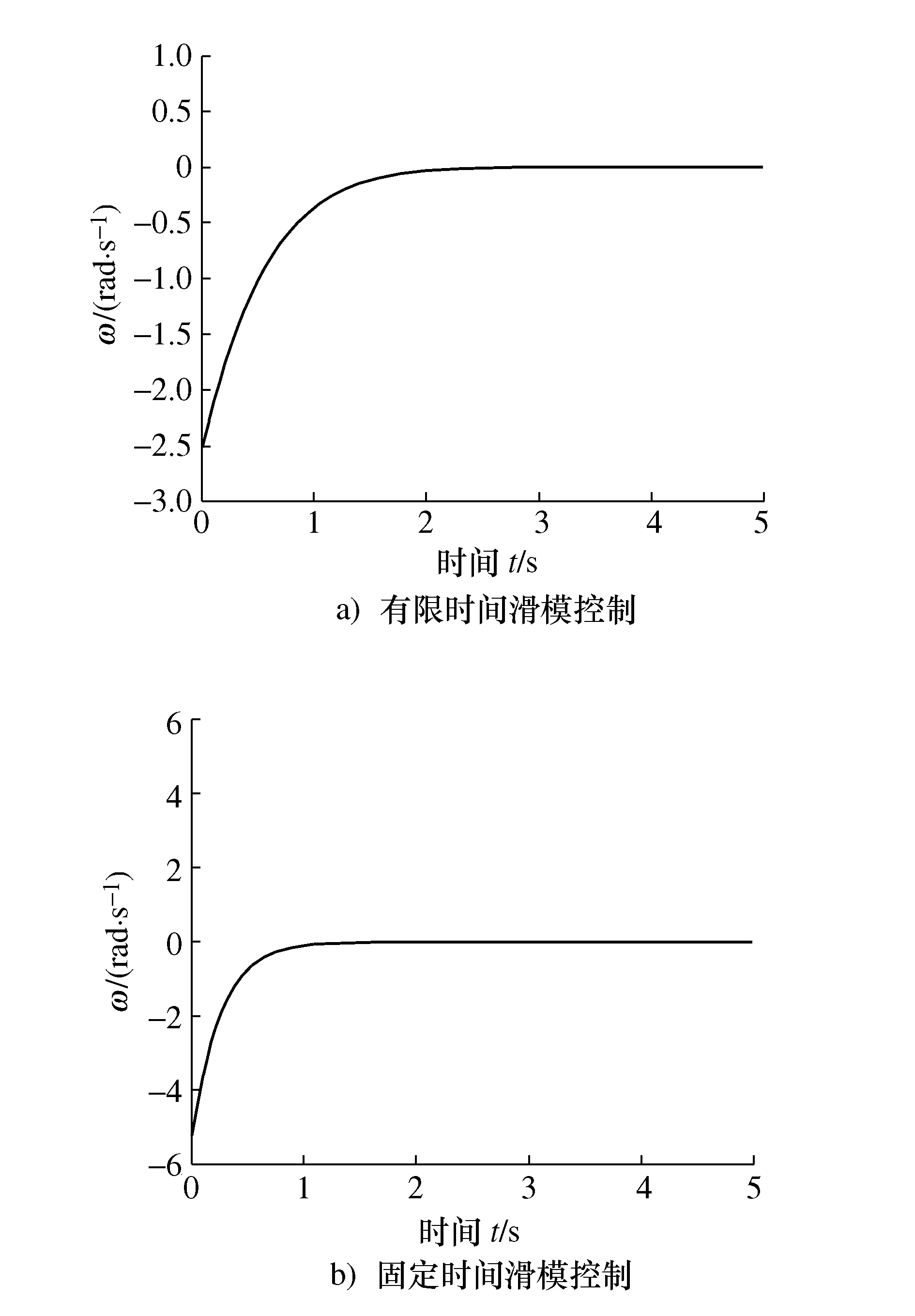
图14 跟踪圆角速度
对圆轨迹的跟踪结果来看,固定时间滑模和有限时间滑模控制均快于普通滑模控制结果。跟踪速度误差收敛情况,普通滑模收敛时间约为2.5 s,有限时间滑模在2 s左右收敛到0;固定时间滑模误差收敛速度最快,仅为大约1 s左右。所以跟踪精度来说为固定时间滑模控制>有限时间滑模控制>普通滑模控制。
综合上述仿真结果来看,固定/有限时间滑模控制均比普通滑模控制算法跟踪速度更快且跟踪误差更小、跟踪精度更高。结合图5、图6、图9、图10、图13、图14来看,两种控制算法均具有良好的稳定性。
4 结论
1) 针对现有爬壁机器人轨迹跟踪精度存在的问题并结合工程实际需求,建立并推导了爬壁机器人的运动学方程和位姿误差方程。根据爬壁机器人自由度特征量与被控变量的关系,提出了一种采用外环的位置控制和内环的姿态控制结合的双闭环控制方法。
2) 设计了固定/有限时间滑模控制器和验证了系统稳定性。固定/有限时间滑模控制引入非线性系统使系统具有有限时间稳定的平衡态,并利用Backstepping思想反步稳定性函数,保证姿态子系统满足Lyapunov稳定,还能够保证其在固定/有限时间内收敛到平衡态。有限滑模控制器时间可以预知,但依赖于系统设置的初始条件。固定时间滑模控制收敛时间不依赖于初始条件,并且收敛时间快于有限滑模控制。
3) 利用MATLAB分别对两种控制算法进行了跟踪圆轨迹、正弦轨迹、直线轨迹的跟踪实验,并与一般的滑模控制算法对比。结合仿真结果证明了固定/有限滑模控制没有抖震,且比一般滑模控制更高的跟踪精度与更快的跟踪速度。在性能上来看,固定滑模控制更优于有限时间滑模和固定时间滑模。
