基于多圆检测的矿山相似模拟场实时位移反馈方法
2022-07-16龚平顺
龚平顺,洪 炎
(安徽理工大学 电气与信息工程学院,安徽 淮南 232001)
0 引言
矿山相似模拟实验[1-4]模型是根据一定比例还原模拟矿区的地质情况,并采用相似材料来制作的力学模型。开采过程中,通过模型的坍塌情况来分析模拟矿区煤层的沉陷[5],典型的相似模拟场模型中会布置多个尺寸相同的圆形靶点。目前通常采用全站仪等设备对靶点坐标进行检测,检测过程耗时长,处理速度慢,无法实时捕捉模拟场塌陷变化。近年来,数字散斑[6,7]配合摄影测量[8]为监测模型断裂提供了可替代方法,但散斑的遮挡可能会导致裂隙发育这一重要参数难以观测,这也阻碍了该技术在相似模拟场中的广泛应用。常见的圆检测方法有基于随机抽样一致性的圆检测算法,基于遗传算法的多圆检测法,基于卷积神经网络的多圆检测法,基于Hough变换的圆检测算[9]。这些算法在单独的圆检测和复杂环境中都有各自的优点,但在实验环境基本统一的矿山相似模拟场多圆检测中却会导致算法的时间、空间复杂度急剧增加,不利于工程实践。Hough梯度法原理通过梯度方向的映射投票,在Canny边缘检测[10]基础上,可以实现圆心、半径的快速诊定,其多圆检测效果非常适合用于矿山相似模拟场靶点坐标反馈。为此,本研究提出基于机器视觉的多圆检测法,以解决矿山相似模拟场的多靶点场位移实时反馈和沉陷监测。
1 矿山相似模拟实验特点
矿山相似模拟实验旨在研究实验模型坍塌过程中靶点发生的位移变动和裂隙发育。其中裂隙的发育可以通过肉眼清楚地观察,而由于实验场景的应用不同,靶点的微小变动很难被人工捕捉。目前普遍使用的靶点基本呈圆形且数量众多,如图1所示,多靶点呈密集分布特征。

图1 实验完整铺设模型
在传统的靶点位移探测中,通常的模型制作几何相似比约为几百比一,采用全站仪手段测量只能监测到几厘米的位移变动,根据模型制作比例还原到实际矿山变动值可达几米,难以精确还原矿山开采的真实情况。为此,提出了基于像素场位移的数据分析手段,按照模型制作几何相似比选择合适的像素点尺度建立映射模型,(以精确到0.1 mm的像素点位移为例,还原到实际矿山上即为几厘米的变动值)以力求在最大程度上还原实际开采情况。
2 多圆检测方法
基于多圆检测的矿山相似模拟场实时位移反馈方法,其基本流程包括:利用固定高清相机分时采集模型不同开挖时期的图照数据,并存入图像数据库中;对图像进行灰度处理,引入Canny边缘检测计算出边缘双阈值,做连接性分析获得二值图像;采用Hough梯度法进行圆检测分离出圆形边缘,并进一步反馈出每一张图片各靶点的圆心和半径;在获取单幅图片的所有靶点坐标后,采用图形循迹的方式对规划路径重排序,将坐标按需求顺序排列实现测线分类。同时对比于不同时刻的坐标变化,便可得到实时坐标位移。最后对不同开采阶段的坐标位置分析研究,得到模拟实验所需要数据,处理流程如图2所示。
3 算法介绍
3.1 Canny边缘检测
Canny算法的实现主要包括四个方面。首先,算法采用高斯滤波器对图像进行平滑处理;其次,根据平滑后图像的梯度大小和方向计算图像的梯度大小和方向;第三,算法中局部区域的干扰采用非极大值抑制技术进行;第四,通过设定的高低阈值技术进行虚假边缘的去除;最后得到连接后的真实边缘。
算法具体步骤如下:
(1) 高斯滤波平滑图像:采用二维高斯函数,对图像进行平滑滤波,其高斯函数为
(1)

图2 技术流程图
(2) 计算梯度大小和方向:计算平滑后图像f(x,y)的水平,垂直方向偏导数为
(2)
(3)
求出水平,垂直方向偏导数后,计算梯度模值P(x,y)和梯度方向θ(x,y)分别为
(4)
(5)
(3) 非极大值抑制:根据梯度方向判断梯度幅值的极大值,将非边缘点赋值删除,抑制后的候选边缘点保留。
(4) 双阈值检测和边缘连接:设置高低阈值在2∶1至3∶1之间,分析弱边缘点八邻域内是否存在强边缘点,有则保留弱边缘点。
3.2 Hough梯度法
Hough梯度算法步骤:第一步根据每个点的模向量找到圆心,这样三维的累加平面就转化为二维累加平面;第二步根据所有候选中心边缘的非零像素值确定各圆半径。
该算法首先先找圆心疑似点,再对疑似点进行半径确定:在canny边缘检测后得到图像的边缘信息后,分以下步骤:①利用边缘点的梯度信息,沿着梯度方向画线,将线段经过的所有累加器中的点值加一。 此步原理是:圆上的点沿着梯度方向画线,这些线会交于圆心。②统计排序霍夫累加器中的投票时,得票是越高,说明更多得边缘梯度线经过该点,是圆心的可能性就更大。③针对某个圆心计算所有边缘点到其的距离,认为频数较大的距离为可能半径值。
Circles=cv.HoughCircles(image,cv.HOUGH_GRADIENT,dp,minDist,circles=None,param1=None,param2=None,minRadius=None,maxRadius=None)
在具体实施过程中,对于首张图像采用人工干预,用尺度测量工具测量目标检测靶点圆的半径大小(以像素为单位),设置minRadius和maxRadius的阈值。Param1为canny边缘检测的梯度值,因开采过程中图像前景与背景变化不大,简单计算首张图片靶点附近梯度值即可获取。对于dp,minDist以及param2的值采用默认值。
3.3 基于图形循迹排列的测线分类
为解决图像处理后的反馈坐标与标识符号不能一一对应,我们提出了一种基于图形循迹排列的测线分类方法,将反馈出的坐标绘制成散点图,规划设计的测线安排为图像循迹提供路线,之后将路径上的点坐标按顺序重排列,即可分类出所需观察测线。
4 实验设计和结果分析
按照规定表计算的用量制作好材料,加水拌匀。然后按各分层用量将材料分层铺设,装入模板中。为便于将模型材料压实,铺设时每次成型厚度严格按照设计厚度铺设,模型中岩层的结构面在成型过程中通过撒适量的云母粉来模拟。每一层中按节理方向和节理密度设置缝隙,撒入云母粉,模拟裂隙及节理情况,模型放置3天后去掉侧护板,让其干燥10天。
实验考虑到拍摄视场大,需配置高像素相机,故采用2400万像素工业相机两个(6000 pixel×4000pixel),配备12 mm定焦镜头两个,计算标准测量距离4300 mm,相机间距为1880 mm。为保持良好光线,使用200 W白光光源补光。2000×2000 mm十字标定尺用于对左右相机进行标定。当开始实验时,在系统软件中打开相机,观察实时图像,调节相机高低、角度,以标定板为参考,保证左右图像高低一致,绿色十字线与标定板对中,如图3(a)所示。调节镜头的焦距以及光圈,保证两台相机图像清晰,亮度均匀,如图3(b)所示。

图3 相机系统调试
相机标定是获取相机内外参数的过程,本系统的相机标定方法是将标识板上的准确距离设为比例尺,用两个摄像机通过不同方位拍摄标识板获得图像数据,识别标识点的坐标,采用一定算法计算得到相机的内外参数。
相似材料模拟实验模型全景如图4所示,图5、图6为模型施工铺设并且布置好靶点、测线后的完整图,测线从上到下分别命名为A、B、C、D、E以及F,每条测线上的靶点编号为1至29,总体分布从上至下,从左至右为A1至A29,B1至B29,C1至C29,D1至D29,E1至E29以及F1至F29。横向布置的黑色条形区模拟实际煤矿,从上至下共五条,本次实验开采部分为最下方煤层区,采用从右向左的推进开采方式,随着时间推移观察模型的变动情况。为方便区分,实验选取两次实验模型板,一块进行圆检测效果图测试,另一块做沉陷分析。

图4 实验模型全景

图6 实验完整铺设模型4
4.1 圆检测效果测试
基于多圆检测的矿山相似模拟实验实时位移方法主要关注于两点:①对区域内所有圆形靶点的识别;②对每个靶点识别的准确度。
图7(a)为实验模型4完整铺设图,图7(a)中,框选后的方形区域放大后即为图7(c)和图7(d),为方便主观视觉评价,对识别圆形边缘用红色框选,可以看出识别区域的准确度较好。图7(b)为实验模型2的多圆检测整体效果图,为便于观察,圆形检测采用填充式识别由图中可以看出,已对区域内所有圆形完成识别。

图7 圆检测效果测试
4.2 沉陷分析
下面是实验模型板3开采三天后的样图(图8)。实验在模拟实验板上设置了六条测线,每条测线29个靶点,共174个靶点用于检测。以拍摄后的图照分辨率为5184×2912为例,对应于实验板宽3 m,高1.5 m。按照长边换算,每一个像素点对应0.58 mm的空间位移变动。拍摄全程保持双目摄像机固定,正对模型架且自动拍摄,在减弱水平变形的同时确保监测相对位移的准确。
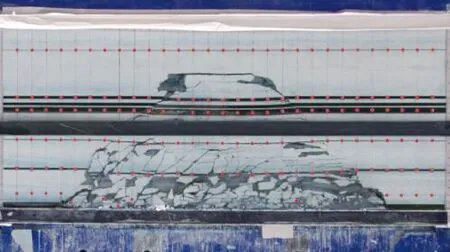
图8 实验完整铺设模型3效果测试
由图8可知,算法已完成对图中所有存在圆形靶点的识别,对于开采区附近已脱落的靶点不再考虑沉陷分析,默认已达到最大沉陷量。
沉陷分析结果专注于三个测量结果:①整体岩层随着时间的大致变化情况;②单条侧线的沉陷情况;③单个靶点随时间的变动情况。结合这三种分析图,从点、线、面上描述矿山相似模拟场的沉陷情况,可以有效反映模型的沉陷状态。下面是沉陷图:

图9 沉陷图(18/09/2021 11:41)
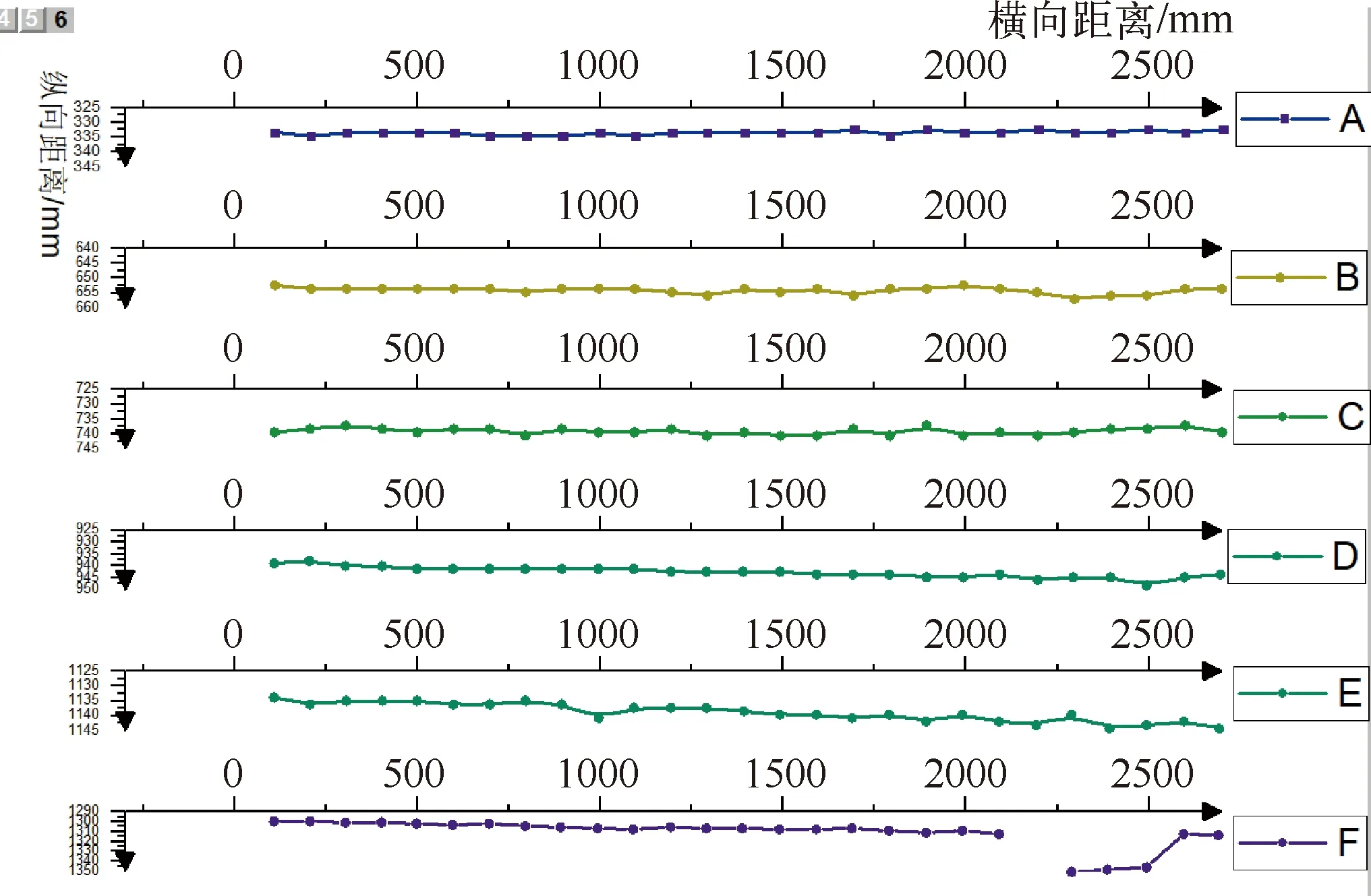
图10 沉陷图(18/09/2021 18:23)

图11 沉陷图( 19/09/2021 13:44)

图12 沉陷图(20/09/2021 18:12)
(1) 整体岩层随时间的大致变化情况
图9~图12为实验板开采三天过程中六条测线的像素点的状态情况,整体分析可以看出模型的坍塌趋势,采用像素点场位移便于直接观察数据结果。
(2) 单条测线的沉陷情况
选取模型中两条测线B、C做测线沉陷图,当像素点尺度与模型的尺度比符合模型制作几何相似比时,即可将像素点位移场的变动作为实际矿山坍塌情况的近似参考。如图13、图14所示,一个像素位移变动值表示0.58 cm的实际矿山坍塌情况。四条测线的沉陷情况经插值、拟合后的映射模型状态相比于沉陷图(图12)更加贴近于矿山开采过程的真实状态,体现了基于像素点场位移在矿山相似模拟实验中的优越性。
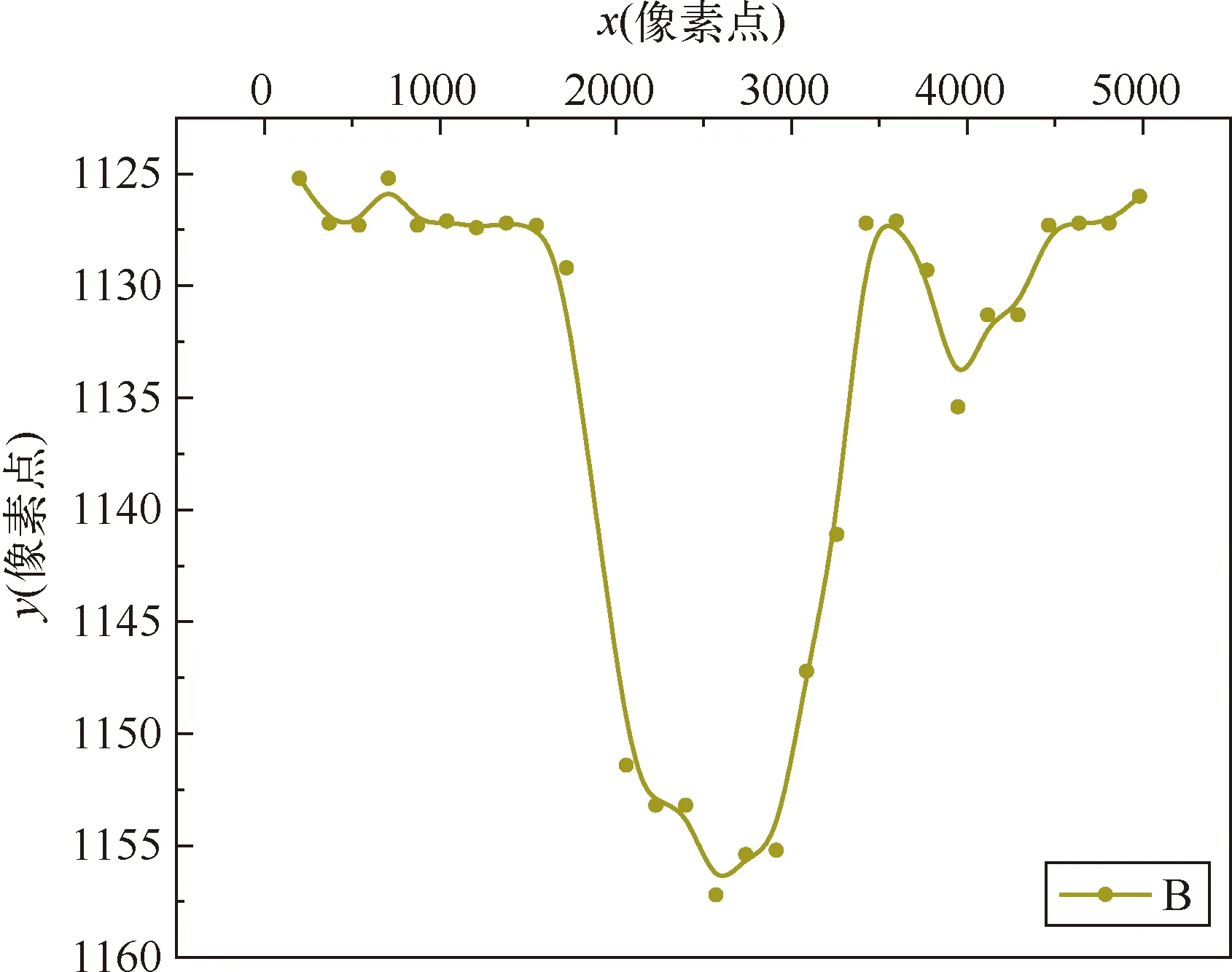
图13 B测线沉陷图

图14 C测线沉陷图
(3) 单个靶点随时间的变动情况
在实验中,选取了每条测线的最大沉陷靶点,即A17、B17、C17、D17、E17以及F17做出了他们每两个小时推移而发生的空间坐标沉陷图(图15),共36 h的时间里,在最后一天的开采中,F测线基本坍塌到底部,F17靶点已经脱落,视作已达到最大沉陷量33 mm,E测线上的E17靶点达到最大沉陷量29.4 mm,皆与实际测量相符。

图15 单个靶点沉陷图
5 结论
(1) 矿山相似模拟实验数据采集通常采用全站仪法自动化水平不高,且只能定性分析,而数字散斑技术在相似模拟场实验应用中又存在裂隙发育难以观察等缺陷。
(2) 基于多圆检测的矿山相似模拟场靶点坐标识别法,解决了相似模拟场靶点阵列坐标的实时检测;利用像素场位移反馈机制生成的测线沉陷图有效反映了更加真实的采掘沉陷状况,提高了相似模拟场实验的准确性和实时性,这为相似模拟实验分析矿山开采沉陷提供了一种新思路。
