家用智能看护机器人高精度里程计估计算法
2022-07-14余雷刘怡明张灵霖徐扬
余雷 刘怡明 张灵霖 徐扬

摘要:为了解决家用智能看护机器人车轮轮胎和地面作用力与电机输出力矩不平衡,易导致看护机器人产生滑动、里程计估计精度低的问题,引入牵引系数描述机器人滑动情况,推导含牵引系数的看护机器人运动学模型,以增量式光电编码器和惯性测量单元2种传感器为输入,将含牵引系数的运动学模型应用于基于扩展卡尔曼滤波算法的看护机器人里程计估计算法,搭建看护机器人实验系统完成算法验证。结果表明:在家用瓷砖地面,看护机器人分别以0.1,0.2,0.4 m/s的速度移动时,与传统里程计估计算法相比,所提出的机器人里程计估计算法的误差降低了40%左右。将含牵引系数的运动学模型应用于机器人里程计估计算法,可有效降低看护机器人的里程计估计误差,为提高看护机器人在室内地面的自主导航精度提供了一定的参考。
关键词:机器人控制;智能看护机器人;里程计估计;多传感器融合;牵引系数
中图分类号:TP242.6文献标识码:A
DOI:10.7535/hbkd.2022yx03006
High precision odometer estimation algorithm for household intelligent nursing robot
YU Lei,LIU Yiming,ZHANG Linglin,XU Yang
(School of Mechanical and Electrical Engineering,Soochow University,Suzhou,Jiangsu 215031,China)
Abstract:In order to solve the problem that the imbalance between wheel tire of home nursing robot and the ground force and the motor output torque is easy to the sliding of the robot and the low accuracy of odometer estimation,the traction coefficient was introduced to describe the sliding condition of the robot,and the kinematic model of robot containing traction coefficient was deduced.Two sensors of incremental photoelectric encoder and inertial measurement unit were adopted as inputs to apply the kinematic model containing traction coefficient in the odometer estimation algorithm based on extended Kalman Filter algorithm.Finally,a robot experimental system was formulated to complete the algorithm verification.The results indicate that when the robot moves at the speed of 0.1,0.2,0.4 m/s on home ceramic ground,the estimation error of the proposed robot odometer is reduced by about 40% compared with the traditional odometer estimation algorithm.Applying the kinematic model with traction coefficient to the robot range meter estimation algorithm can effectively reduce the odometer estimation error of the nursing robot,thus providing a certain reference for the improvement of the independent navigational accuracy of the home nursing robot on indoor grounds.
Keywords:
robot control;intelligent nursing robot;odometer estimation;multisensory fusion;traction coefficient
隨着人口老龄化问题的日益紧迫,独居老人在家中发生意外时无法自救的问题愈发引起社会的广泛关注[1]。在这种背景下,基于物联网技术和机器人技术的家庭智能看护机器人逐渐得到人们的认可[2-3]。然而,目前家庭智能看护机器人的研究仍处于初期阶段,实现看护机器人在家庭复杂室内环境下的精准导航依然是该领域极具挑战性的研究方向之一。看护机器人能够实现精准导航主要依赖于机器人的状态估计、控制算法、路径规划算法和环境感知能力,其中,机器人的状态估计精度是决定看护机器人导航精准程度的基础,里程计是获知机器人位姿和速度、实现机器人定位与导航的重要信息来源。家庭地面材质比较光滑,极易引起轮胎与地面间的作用力同电机输出力矩之间的不平衡,导致机器人产生滑动。传统的机器人运动学模型并未考虑滑动问题,对机器人在空间移动时的状态(如位置和方向)估计往往有偏差,导致机器人里程计估计发生偏差,降低了看护机器人的自主导航精度。此外,由于人们往往会低估真实世界中机器人状态估计的难度,相对于其他方面而言,对家用智能看护机器人高精度里程计估计算法的研究相对较少[4-5]。因此,研究看护机器人受滑动影响时的高精度里程计估计算法十分必要。
看护机器人的里程计估计误差无法彻底消除,且会随着时间的增加而发散。为了抑制里程计发散,目前最常用的方法是通过编码器、惯性测量单元[6-9]、GPS[10-12]和视觉传感器[13-17]等多传感器的融合,实现传感器间的特性互补,进而降低估计误差。但是,当轮胎与地面的滑动效应较为严重时,用于多传感器融合的传统机器人运动学模型同样会产生偏差,导致里程计估计精度降低。目前,处理机器人运动学模型偏差的主要方法是使用高斯白噪声进行误差补偿,但这种假设与真实情况偏差较大,估计精度提升较小。REICHARD等[18-19]提出了引入瞬时转动中心点实时估计机器人的动力学模型,使用扩展卡尔曼滤波器对中心点进行实时估计,但计算量较大。
本文在看护机器人运动学模型推导过程中,引入一个牵引系数,应对机器人滑动产生的影响。该牵引系数与地面和轮胎之间的作用力有关,将随着地面材质的不同发生变化,但对同一种地面,该牵引系数近似为常数。为了验证牵引系数对机器人里程计估计精度的影响,将该模型应用于基于多传感器融合的里程计估计算法进行了对比。
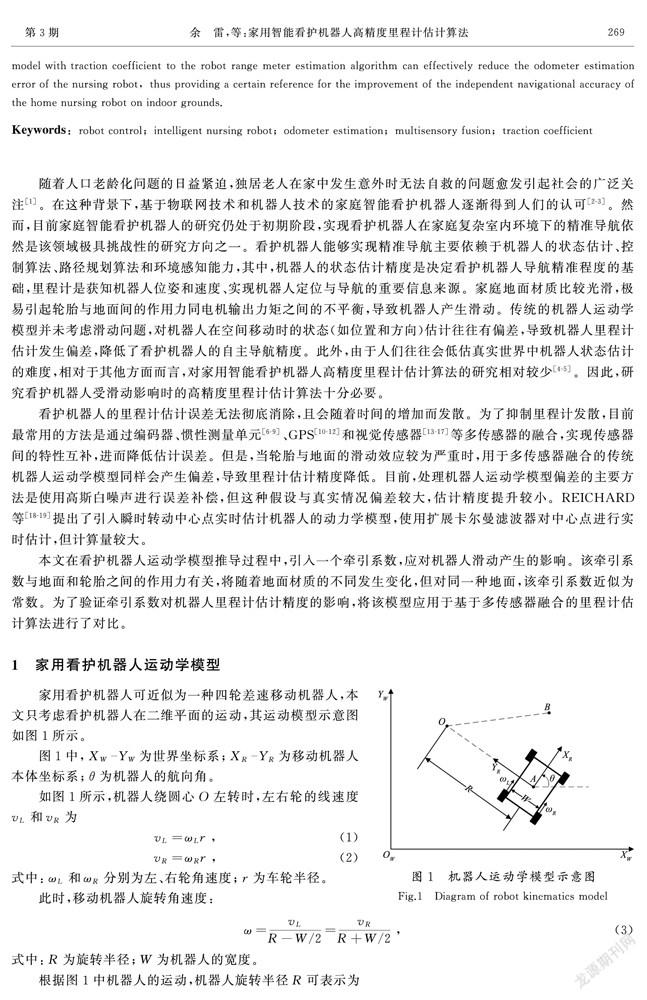
1家用看护机器人运动学模型
家用看护机器人可近似为一种四轮差速移动机器人,本文只考虑看护机器人在二维平面的运动,其运动模型示意图如图1所示。
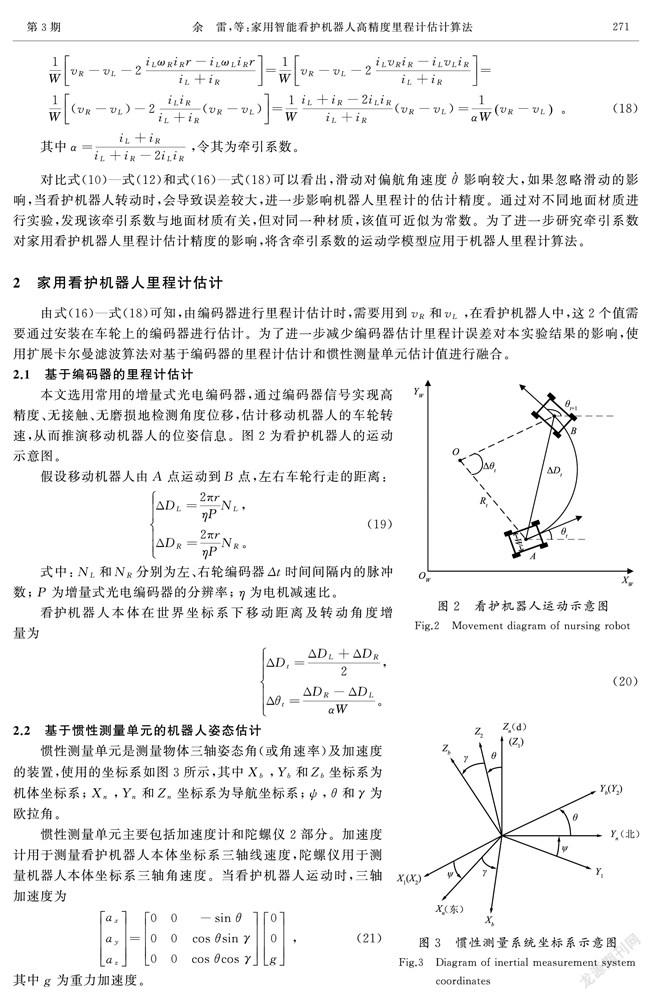
2.1基于编码器的里程计估计
2.2基于惯性测量单元的机器人姿态估计
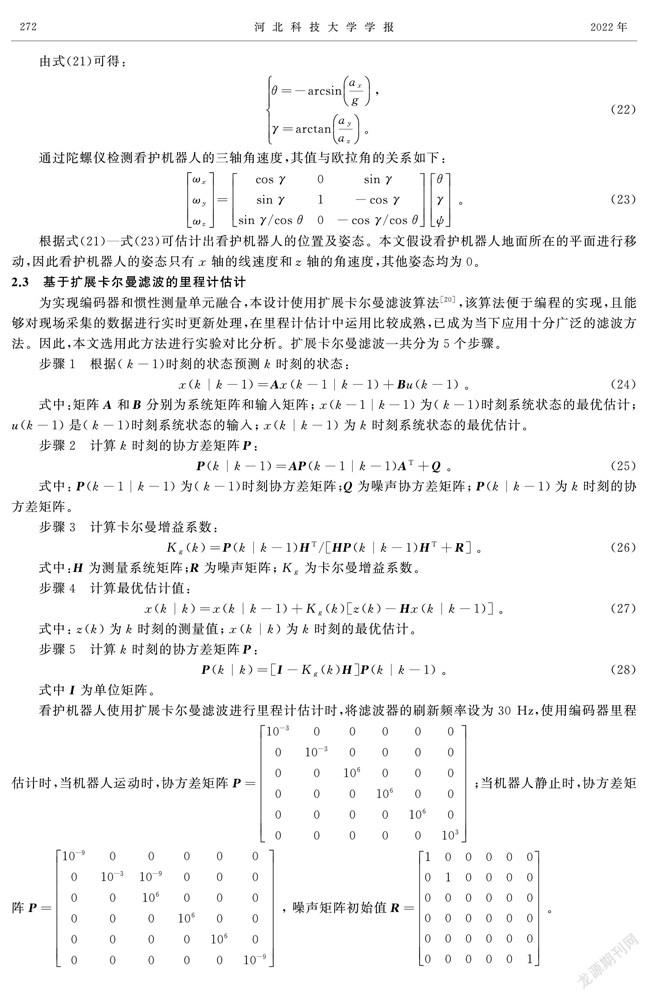
2.3基于扩展卡尔曼滤波的里程计估计
为实现编码器和惯性测量单元融合,本设计使用扩展卡尔曼滤波算法[20],该算法便于编程的实现,且能够对现场采集的数据进行实时更新处理,在里程计估计中运用比较成熟,已成为当下应用十分广泛的滤波方法。因此,本文选用此方法进行实验对比分析。扩展卡尔曼滤波一共分为5个步骤。
3实验平台设计与结果分析
3.1实验平台设计
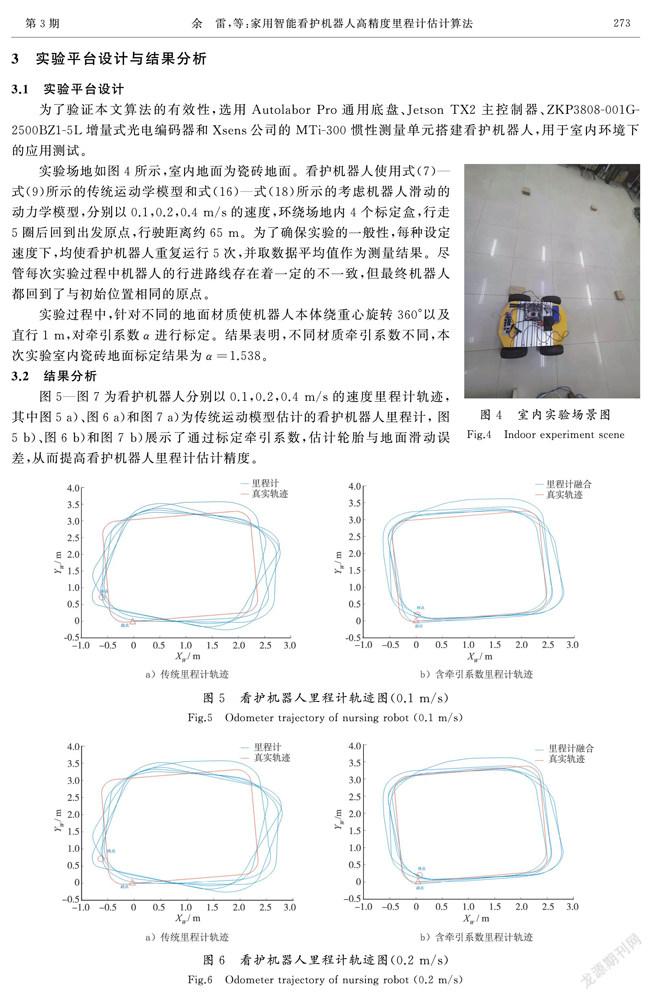
为了验证本文算法的有效性,选用Autolabor Pro通用底盘、Jetson TX2主控制器、ZKP3808-001G-2500BZ1-5L增量式光电编码器和Xsens公司的MTi-300惯性测量单元搭建看护机器人,用于室内环境下的应用测试。
实验场地如图4所示,室内地面为瓷砖地面。看护机器人使用式(7)—式(9)所示的传统运动学模型和式(16)—式(18)所示的考虑机器人滑动的动力学模型,分别以0.1,0.2,0.4 m/s的速度,环绕场地内4个标定盒,行走5圈后回到出发原点,行驶距离约65 m。为了确保实验的一般性,每種设定速度下,均使看护机器人重复运行5次,并取数据平均值作为测量结果。尽管每次实验过程中机器人的行进路线存在着一定的不一致,但最终机器人都回到了与初始位置相同的原点。
实验过程中,针对不同的地面材质使机器人本体绕重心旋转360°以及直行1 m,对牵引系数α进行标定。结果表明,不同材质牵引系数不同,本次实验室内瓷砖地面标定结果为α=1.538。
3.2结果分析
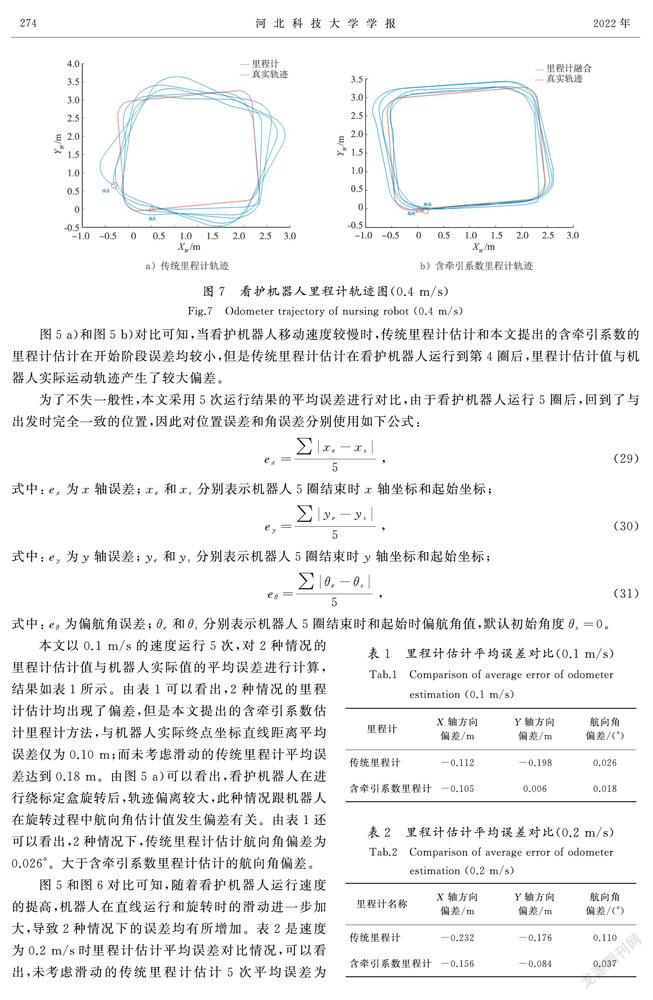
图5 a)和图5 b)对比可知,当看护机器人移动速度较慢时,传统里程计估计和本文提出的含牵引系数的里程计估计在开始阶段误差均较小,但是传统里程计估计在看护机器人运行到第4圈后,里程计估计值与机器人实际运动轨迹产生了较大偏差。
为了不失一般性,本文采用5次运行结果的平均误差进行对比,由于看护机器人运行5圈后,回到了与出发时完全一致的位置,因此对位置误差和角误差分别使用如下公式:
本文以0.1 m/s的速度运行5次,对2种情况的里程计估计值与机器人实际值的平均误差进行计算,结果如表1所示。由表1可以看出,2种情况的里程计估计均出现了偏差,但是本文提出的含牵引系数估计里程计方法,与机器人实际终点坐标直线距离平均误差仅为0.10 m;而未考虑滑动的传统里程计平均误差达到0.18 m。由图5 a)可以看出,看护机器人在进行绕标定盒旋转后,轨迹偏离较大,此种情况跟机器人在旋转过程中航向角估计值发生偏差有关。由表1还可以看出,2种情况下,传统里程计估计航向角偏差为0.026°。大于含牵引系数里程计估计的航向角偏差。
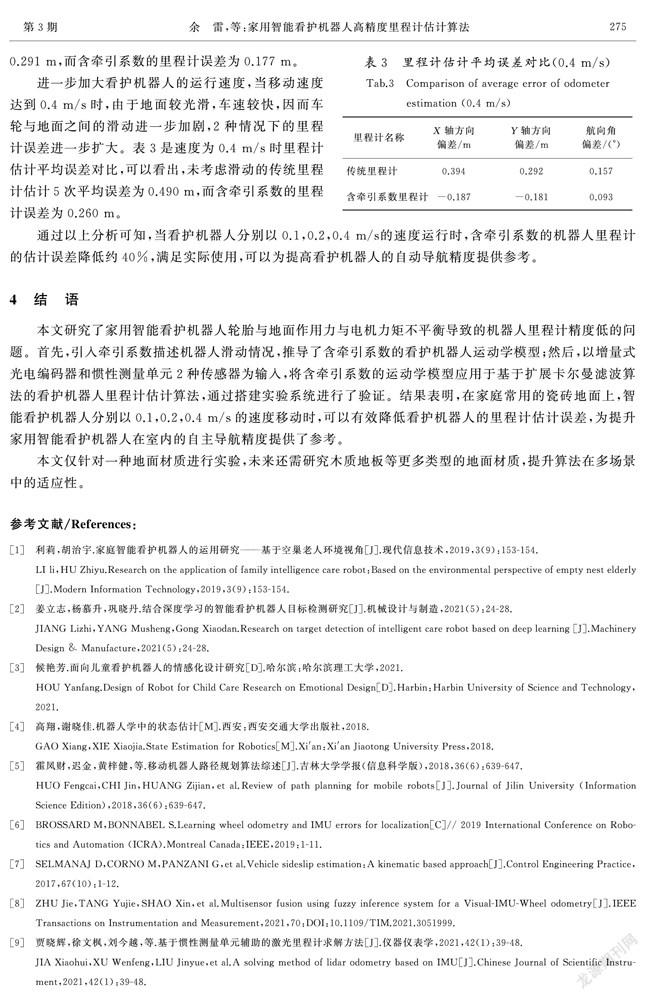
图5和图6对比可知,随着看护机器人运行速度的提高,机器人在直线运行和旋转时的滑动进一步加大,导致2种情况下的误差均有所增加。表2是速度为0.2 m/s时里程计估计平均误差对比情况,
可以看出,未考虑滑动的传统里程计估计5次平均误差为0.291 m,而含牵引系数的里程计误差为0.177 m。
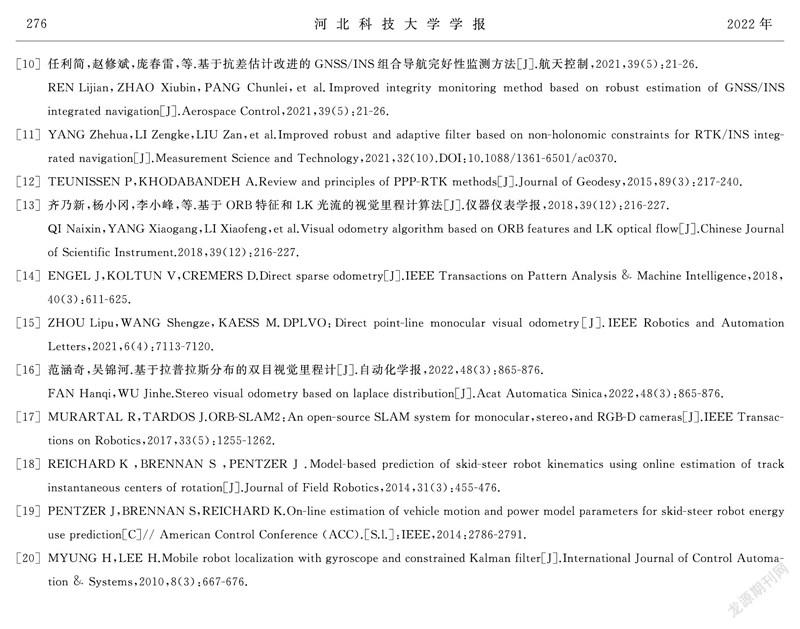
进一步加大看护机器人的运行速度,当移动速度达到0.4 m/s时,由于地面较光滑,车速较快,因而车轮与地面之间的滑动进一步加剧,2种情况下的里程计误差进一步扩大。表3是速度为0.4 m/s时里程计估计平均误差对比,可以看出,未考虑滑动的传统里程计估计5次平均误差为0.490 m,而含牵引系数的里程计误差为0.260 m。
通过以上分析可知,当看护机器人分别以0.1,0.2,0.4 m/s的速度运行时,含牵引系数的机器人里程计的估计误差降低约40%,满足实际使用,可以为提高看护机器人的自动导航精度提供参考。
4结语
本文研究了家用智能看护机器人轮胎与地面作用力与电机力矩不平衡导致的机器人里程计精度低的问题。首先,引入牵引系数描述机器人滑动情况,推导了含牵引系数的看护机器人运动学模型;然后,以增量式光电编码器和惯性测量单元2种传感器为输入,将含牵引系数的运动学模型应用于基于扩展卡尔曼滤波算法的看护机器人里程计估计算法,通过搭建实验系统进行了验证。结果表明,在家庭常用的瓷砖地面上,智能看护机器人分别以0.1,0.2,0.4 m/s的速度移动时,可以有效降低看护机器人的里程计估计误差,为提升家用智能看护机器人在室内的自主导航精度提供了参考。
本文僅针对一种地面材质进行实验,未来还需研究木质地板等更多类型的地面材质,提升算法在多场景中的适应性。
参考文献/References:
[1]利莉,胡治宇.家庭智能看护机器人的运用研究——基于空巢老人环境视角[J].现代信息技术,2019,3(9):153-154.LI li,HU Zhiyu.Research on the application of family intelligence care robot:Based on the environmental perspective of empty nest elderly [J].Modern Information Technology,2019,3(9):153-154.
[2]姜立志,杨慕升,巩晓丹.结合深度学习的智能看护机器人目标检测研究[J].机械设计与制造,2021(5):24-28.
JIANG Lizhi,YANG Musheng,Gong Xiaodan.Research on target detection of intelligent care robot based on deep learning [J].Machinery Design & Manufacture,2021(5):24-28.
[3]候艳芳.面向儿童看护机器人的情感化设计研究[D].哈尔滨:哈尔滨理工大学,2021.HOU Yanfang.Design of Robot for Child Care Research on Emotional Design[D].Harbin:Harbin University of Science and Technology,2021.
[4]高翔,谢晓佳.机器人学中的状态估计[M].西安:西安交通大学出版社,2018.GAO Xiang,XIE Xiaojia.State Estimation for Robotics[M].Xi′an:Xi′an Jiaotong University Press,2018.
[5]霍凤财,迟金,黄梓健,等.移动机器人路径规划算法综述[J].吉林大学学报(信息科学版),2018,36(6):639-647.HUO Fengcai,CHI Jin,HUANG Zijian,et al.Review of path planning for mobile robots[J].Journal of Jilin University (Information Science Edition),2018,36(6):639-647.
[6]BROSSARD M,BONNABEL S.Learning wheel odometry and IMU errors for localization[C]// 2019 International Conference on Robo-tics and Automation (ICRA).Montreal Canada:IEEE,2019:1-11.
[7]SELMANAJ D,CORNO M,PANZANI G,et al.Vehicle sideslip estimation:A kinematic based approach[J].Control Engineering Practice,2017,67(10):1-12.
[8]ZHU Jie,TANG Yujie,SHAO Xin,et al.Multisensor fusion using fuzzy inference system for a Visual-IMU-Wheel odometry[J].IEEE Transactions on Instrumentation and Measurement,2021,70:DOI:10.1109/TIM.2021.3051999.
[9]贾晓辉,徐文枫,刘今越,等.基于惯性测量单元辅助的激光里程计求解方法[J].仪器仪表学,2021,42(1):39-48.JIA Xiaohui,XU Wenfeng,LIU Jinyue,et al.A solving method of lidar odometry based on IMU[J].Chinese Journal of Scientific Instrument,2021,42(1):39-48.
[10]任利简,赵修斌,庞春雷,等.基于抗差估计改进的GNSS/INS组合导航完好性监测方法[J].航天控制,2021,39(5):21-26.REN Lijian,ZHAO Xiubin,PANG Chunlei,et al.Improved integrity monitoring method based on robust estimation of GNSS/INS integrated navigation[J].Aerospace Control,2021,39(5):21-26.
[11]YANG Zhehua,LI Zengke,LIU Zan,et al.Improved robust and adaptive filter based on non-holonomic constraints for RTK/INS integ-rated navigation[J].Measurement Science and Technology,2021,32(10).DOI:10.1088/1361-6501/ac0370.
[12]TEUNISSEN P,KHODABANDEH A.Review and principles of PPP-RTK methods[J].Journal of Geodesy,2015,89(3):217-240.
[13]齊乃新,杨小冈,李小峰,等.基于ORB特征和LK光流的视觉里程计算法[J].仪器仪表学报,2018,39(12):216-227.QI Naixin,YANG Xiaogang,LI Xiaofeng,et al.Visual odometry algorithm based on ORB features and LK optical flow[J].Chinese Journal of Scientific Instrument.2018,39(12):216-227.
[14]ENGEL J,KOLTUN V,CREMERS D.Direct sparse odometry[J].IEEE Transactions on Pattern Analysis & Machine Intelligence,2018,40(3):611-625.
[15]ZHOU Lipu,WANG Shengze,KAESS M.DPLVO:Direct point-line monocular visual odometry[J].IEEE Robotics and Automation Letters,2021,6(4):7113-7120.
[16]范涵奇,吴锦河.基于拉普拉斯分布的双目视觉里程计[J].自动化学报,2022,48(3):865-876.FAN Hanqi,WU Jinhe.Stereo visual odometry based on laplace distribution[J].Acat Automatica Sinica,2022,48(3):865-876.
[17]MURARTAL R,TARDOS J.ORB-SLAM2:An open-source SLAM system for monocular,stereo,and RGB-D cameras[J].IEEE Transactions on Robotics,2017,33(5):1255-1262.
[18]REICHARD K ,BRENNAN S ,PENTZER J .Model-based prediction of skid-steer robot kinematics using online estimation of track instantaneous centers of rotation[J].Journal of Field Robotics,2014,31(3):455-476.
[19]PENTZER J,BRENNAN S,REICHARD K.On-line estimation of vehicle motion and power model parameters for skid-steer robot energy use prediction[C]// American Control Conference (ACC).[S.l.]:IEEE,2014:2786-2791.
[20]MYUNG H,LEE H.Mobile robot localization with gyroscope and constrained Kalman filter[J].International Journal of Control Automation & Systems,2010,8(3):667-676.[ST][JP]
