小车倒立摆系统的H∞控制研究
2022-07-13刘栩粼谢崇波
刘栩粼 谢崇波②
①四川信息职业技术学院电子与物联网学院
②四川信息职业技术学院软件学院
本文针对小车倒立摆系统在控制过程中存在的不确定性和外部扰动,提出了一种H∞鲁棒LQR控制器。首先,建立I级小车倒立摆的线性数学模型;然后,分别基于Riccati方程和LMI算法设计H∞鲁棒LQR控制器;最后,进行了仿真验证与分析。研究结果表明,H∞鲁棒LQR控制方法不仅调节时间短,而且能补偿系统所受到的内外干扰,保证了系统的鲁棒性和稳定性,较好地满足了系统性能要求。
1 引言
小车倒立摆系统(Cart-pole inverted pendulum system)作为一个典型的非线性欠驱动系统[1],被众多科研学者用于验证控制算法的正确性和可行性。比如,彭锦等人研究了线性二次型最优控制算法在小车倒立摆控制系统中的应用,得出二次最优控制不仅实现了二级直线倒立摆的稳定控制,并且具有较强的抗干扰能力[1];文献2基于小车倒立摆控制系统开设了《自动控制原理实验》教学实践课程,提高了课程组实验教学整体水平。但目前大多数控制方法都依赖于倒立摆控制系统的数学模型进行分析,模型与模型之间存在着偏差以及受到外部干扰等,会使系统无法获得理想的控制效果[3]。
为了解决上述问题,许多学者将鲁棒控制方法(Robust Control Method,RCM)应用于小车倒立摆系统。屠永等人针对倒立摆不确定系统的鲁棒性问题,只考虑被控系统模型的参数摄动对闭环系统的影响,对系统的输出反馈进行了优化设计[4];文献5在文献4的基础上,设计了基于LMI算法的鲁棒H∞控制器,使倒立摆系统具有更好的抗干扰性;李树奎[6]等人研究了倒立摆的虚拟现实仿真教学平台,所设计的控制器能使系统具有更好的稳定性;刘微微[7]等人通过增加系统自身的扰动及LQR控制器中加权阵R的改变,验证所设计的控制方法的鲁棒稳定性。
参考文献5至7鲁棒控制方法,本文在轨迹跟踪控制过程中,存在摆杆质量不确定性和外部扰动的情况下,主要以级小车倒立摆系统为研究对象,首先,建立其线性化的数学模型[9-11],接着,分别基于算法设计控制器,最后分别进行仿真验证与分析。研究结果表明,所设计的鲁棒控制器,不仅调节时间短,并且能较好地补偿系统所受到的内外干扰,提高系统的稳定性,实时控制性好,有利于工程的实际应用。内容安排如下:在第二节中,介绍级小车倒立摆系统的非线性数学模型;第三节设计基于算法的控制器;第四节展示所提出的控制方法的有效性,即倒立摆的摆杆和小车的位置、小车速度、摆杆角度、摆杆角速度以及控制输入量等5种响应的MATLAB/Simulink仿真结果。最后,在第五节中,对所提出的控制方法进行总结。
2 垂直起降飞行器模型
线性模型如下所示。
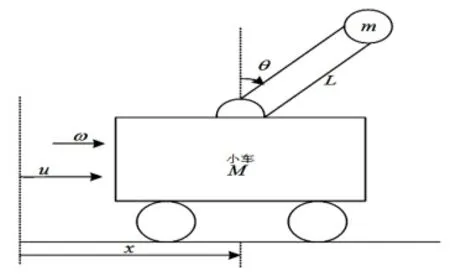
图1 小车倒立摆物理模型
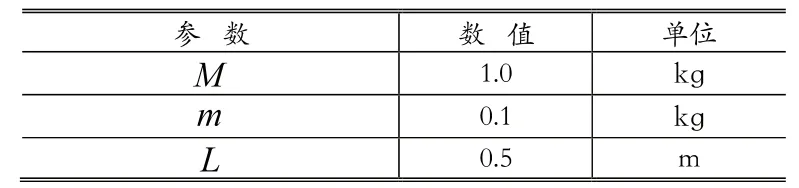
表1 倒立摆结构参数表
根据拉格朗日方程[15],且满足摆杆转角为小角度,即,可得到级小车倒立摆系统的动力学模型,如下所示。
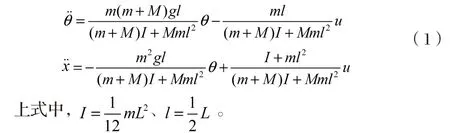

将以上的数学模型转化为标准的LQR最优控制问题模型,则可得到以下系数矩阵:
3 H∞鲁棒LQR控制器设计
从模型式(2)中不难发现,在摆杆质量不确定的基础上,加入干扰项,增加了对倒立摆系统控制的难度[16],因此,本文基于算法设计一个H∞鲁棒控制器。
针对以下不确定线性系统:


(2)闭环系统在LQR意义下是最优的;

则式(5)等价于:


可得到,扰动抑制性能等价于式(8):

3.1 Riccati方程的H∞控制LQR控制器
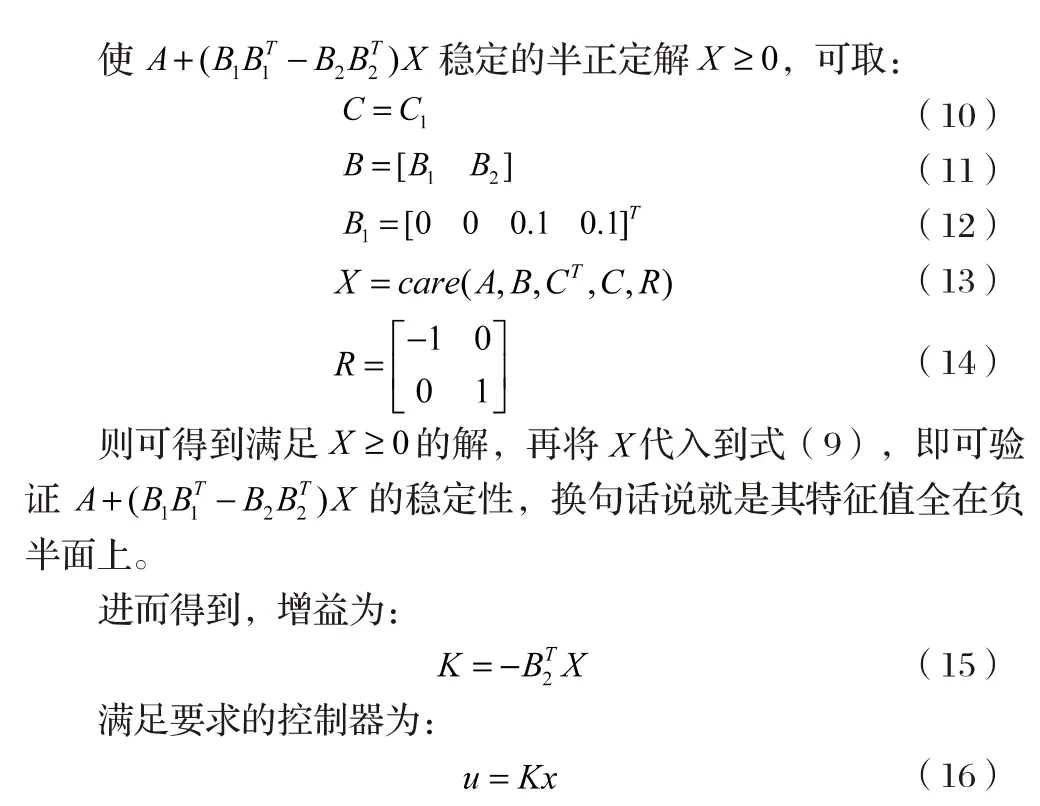
针对式(3),设计反馈控制器,使闭环系统稳定且满足式(8)的充分必要条件是:方程。

3.2 LMI的H∞控制LQR控制器
线性矩阵不等式(Linear Matrix Inequality,LMI)技术是控制科学、系统辨识、结构设计等领域里有效工具。许多控制理论、分析及综合问题都可以通过构造技术来进行求解。
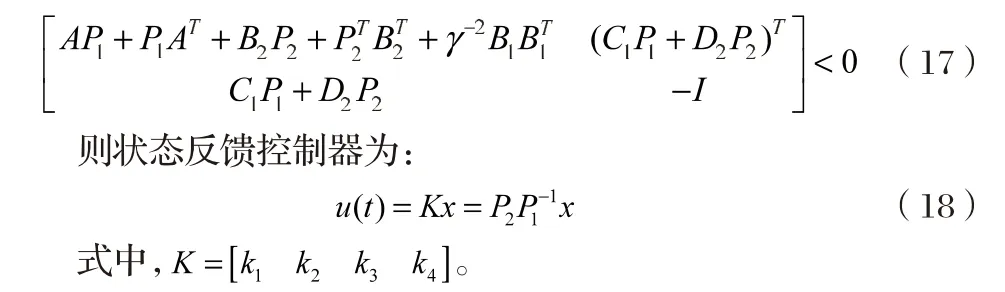
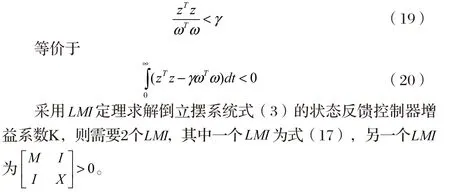
在式(18)反馈下,闭环系统具有鲁棒H∞性能指标,即:
4 仿真结果
结合小车倒立摆系统的数学模型式3、表1,设小车的质量和摆杆为刚体,在外界存在干扰的情况下,摆杆的质量变为原来的1.2倍时,取其他数据在第3节中已经提供,分别利用第3.1节、3.2节中算法对控制器进行求解状态反馈控制器。最后,得到仿真结果如图2~图4所示。
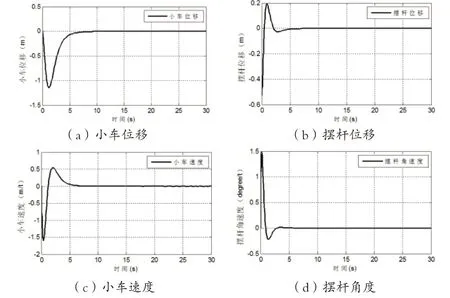
图2 响应过程
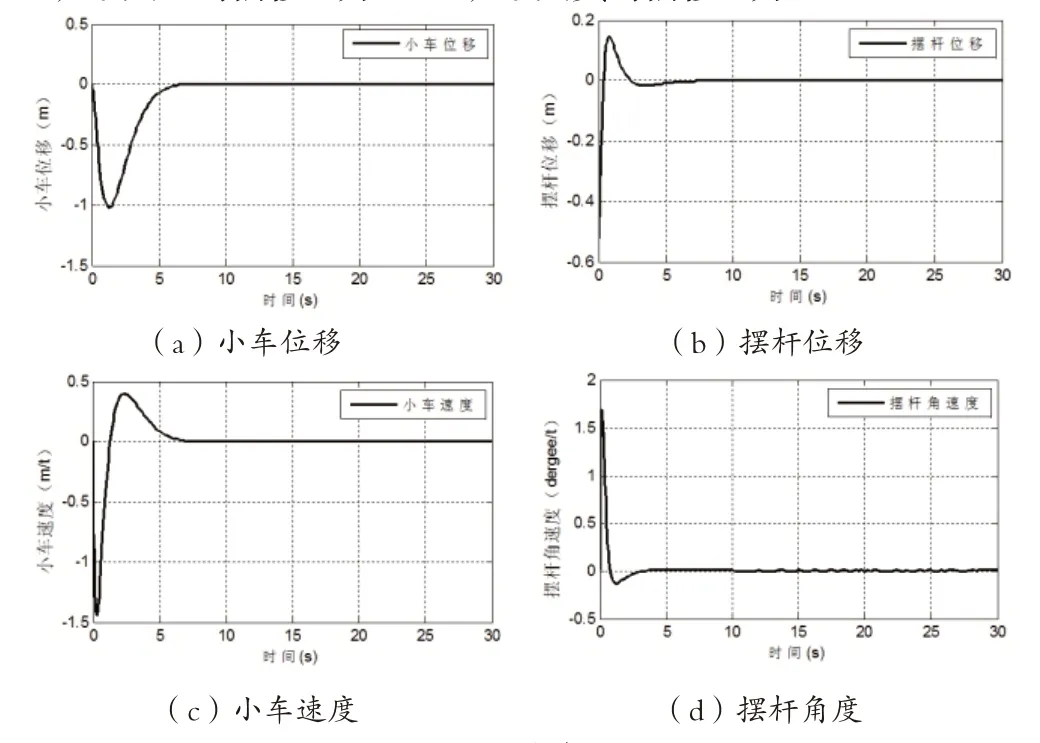
图3 跟踪过程
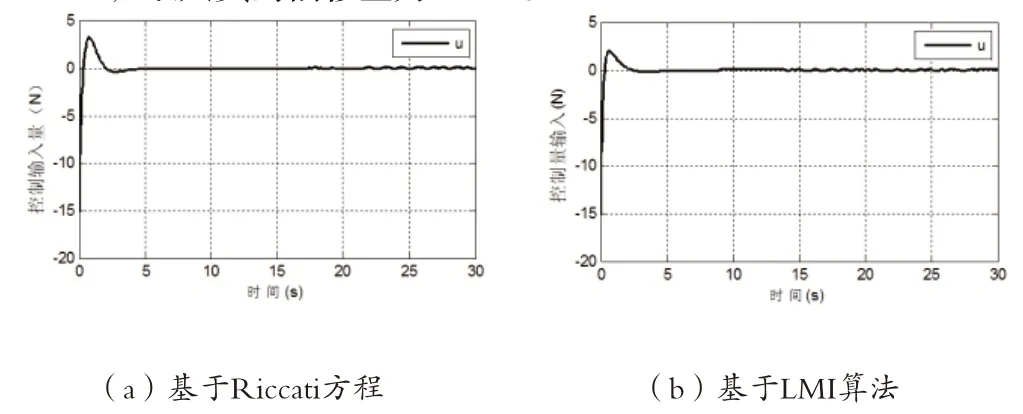
图4 两种输入控制力的跟踪过程