基于协调变量的多机协同打击制导方法与试验验证
2022-07-12唐钟南辛宏博王玉杰陈清阳杨希祥
唐钟南,辛宏博,王玉杰,陈清阳,王 鹏,杨希祥
国防科技大学空天科学学院,长沙 410073
随着世界各军事强国逐步建立区域协同防空体系,单飞行器突防作战成功率大大降低,多对一协同作战理念开始受到广泛重视[1-4].2017年12月,叙利亚反对派采用十余架自杀式无人机重创俄罗斯驻叙利亚赫梅米空军基地,摧毁了至少7架军机,这是近年来无人机集群作战的首个实战案例,显示出这一作战样式的巨大作战效能和开发应用潜力.在2020年亚美尼亚与阿塞拜疆的战争中,阿塞拜疆使用察打一体无人机和小型自杀式无人机的“组合拳”摧毁了亚美尼亚绝大部分防空系统,充分显示了小型无人机遂行打击任务的高效.在小型无人机的集群协同突防领域,目前学者们对于协同的定义通常默认为时间协同[5-8],包括同时到达、紧密时序到达和松散时序到达等,对于空间协同的定义和研究还较少.
时间协同是指通过多机同一时间对目标发动打击,在短时间内达到敌方防空系统火力通道上限,“撕裂”敌防空网;亦或者是通过多弹按时序到达,有利于突破分层设置的地面掩体等目标.时间协同的方法主要有固定时间法和协调导引法.固定时间导引法通过对各机指定期望飞行时间,通过相应的控制方法使得实际飞行时间在有限时间内收敛到预定值,实现时间协同.为了实现对攻击时间的控制,常用的设计方法有:(1)偏置比例导引[9],通过对比例导引附加时间控制项,利用闭环反馈控制时间误差;(2)滑模控制[10],设计时间误差为0的滑模面使得运动状态收敛;(3)最优控制[11],基于最优控制理论设计,通常攻击角约束也一并纳入考虑.由于涉及到预期飞行时间和剩余飞行时间的误差反馈控制,剩余时间估计方法是固定时间导引法的研究的一个重要内容,一般是基于某种已知的制导律,采用微分方法进行近似公式推导[12].本质上固定时间导引法是一种独立导引方式,各机仅仅依靠自身获得的信息进行飞行时间的控制,并且需要确定可行的固定时间范围.实际飞行中由于大规模集群中各机航向、速度的差别,可能导致无法得到满足所有个体的可行时间范围.
协调导引法通过在固定时间导引法设计的导引律的上层引入协调层或者搭建领弹——被领弹架构,应用现代控制理论、图论等相关知识设计协同制导律[13-15].协调导引法本质是使集群在飞行过程中自主协调预期时间,达到某种协调变量一致的状态从而使得最终同时到达目标,相较于固定时间法无需预设飞行时间,在一些方案中也可以不需要剩余时间估计的过程[16-17],对未来复杂战场环境下执行协同作战任务具有更强的适应性,但是制导律的稳定性和通信抗扰能力是亟待解决的问题[18].
目前国内外关于空间协同还没有较为一致的定义[19-20],相关研究内容也较少.一种定义是:飞行器在导引算法的控制下调整各自到目标的视线,使得集群中个体尽可能呈现空间上的均匀分布或者收敛至预先设计的特定空间分布.通常用视线角描述无人机的空间分布,有时还需要满足距离限制.目前的研究多集中于控制终端攻击角[21-23],缺少对飞行过程中的视线角的约束.空间协同的技战术意义在于: (1)尽可能实现对于目标的多方位、立体化打击,最大限度地分散调动敌方防空火力,提高突防概率和毁伤效果;(2)空间均匀分布有利于增强目标可观性,提高多机协同观测精度.Shaferman和Shima[24]基于最优控制理论设计了视线角协同制导律,但是需要实时测量目标航向角,实现难度较大.Wei等[25]考虑了攻击区域限制,设计的制导律能够保证集群在一定视线角范围内飞行.Lee和Tsourdos设计的制导律考虑了多对一拦截问题中相对拦截角的限制,不足之处在于各飞行器之间相对视线角只能相同[26].
时空协同技术对于集群提高复杂战场环境适应性,实现全向饱和打击具有重要意义.本文第一部分介绍了基于时空约束条件下的制导协调变量选取和制导阶段划分过程;第二部分根据制导阶段划分所得到的协调段和末制导段分别设计相应的航迹控制算法;第三部分构建数值仿真环境,对所提制导方案和相应算法进行仿真验证;第四部分搭建集群协同打击验证系统,设计并完成了外场试验,对试验结果数据进行了分析讨论;第五部分给出了本文的结论.
1 协同制导方案
1.1 制导阶段划分
如图1所示,UAV-i和Target分别代表第i架无人机和目标.无人机飞行速度VM,R为平面相对距离,θ代表速度角,λ为目标航向角,σ为无人机速度前置角.忽略飞行时的侧滑角,视 σ为导引头的目标视角.以法向加速度aM为控制量,得到小型无人机的制导方程(1)式:

图1 制导模型示意图Fig.1 Diagram of the guidance model
当前末制导过程中最常用的制导律为比例导引律,具有结构简单,所需导引信息少的优点.比例导引方程为:

其中,N为导引系数,联立(1), (2)式,可以推导得到:

其中,σ0和R0分别为 σ和R的初始值.由(3)式可以得到一个重要结论:飞行速度、导引系数恒定的前提下,比例导引的弹道可以由一组R,σ初始值唯一确定,即各机初始R,σ相同时,若不考虑风场等扰动因素,航迹的形状与命中目标的时刻相同.
在末制导段通过调整导引系数N实现飞行时间调整,通常需要估算剩余飞行时间,适用于比例导引的剩余飞行时间估计公式为:

时变的比例导引系数计算公式为[27]:

其中:N0为初始导引系数,一般取3~5;K=k/,k为一常系数;tgo0为剩余飞行时间tgo的初始值;ε(t)=T-t-tgo为当前飞行时刻剩余飞行时间误差,其中T为期望飞行时间,t为当前时刻,以起飞时间为零时刻起算.时变系数制导律为:

由(4)式可以看出R,σ相同时,各机具有相同的剩余飞行时间,因此时变系数计算得到的下一时刻的比例导引系数相同,结合(3)式可知各机初始R,σ相同时,定常比例导引律的弹道唯一性结论此时仍然适用于上述时变系数导引律.
根据上述弹道唯一性结论,可以初步制定以下任务方案.
(1)协调段:在传统中制导段过程中完成,采取集群协调算法使得集群内所有个体同时达到R,σ状态一致.
(2)末制导段:各机同时切换至变导引系数导引律,由于各机经过协调段飞行后已经具有相同的R,σ,可以以相对于各机初始视线而言的相同弹道同时命中同一目标.协调段飞行可以使得初始视线呈现预期的空间指向,从而达到空间协同.
1.2 协调变量选取
为对协调段进行空间约束,保证R,σ收敛时集群位于特定空间位置,引入协调段制导模型如图2所示.圆形虚线为防空火力射界,表示无人集群的初始位置矢量,n为无人机数量,θi表示第i架无人机的初始速度角,ri则表示第i架无人机的转弯半径,协调段初始时刻为t0,集群的初始状态集如下:
图2 协调段制导模型Fig.2 Guidance model of the coordination phase

类似于初始状态集,协调段终点时刻tf集群状态集表示为:

R*,σ*保证比例导引下到达目标时间相同,φ*保证末制导飞行过程中的空间相位均匀分布.在协调变量收敛到一致的情况下,集群可以实现时空协同打击.
综上所述,协调段航迹搜索的目标在于寻找威胁圈上合理的攻击位置序列{φ1,φ2,···,φn},使得协调变量满足前文所述要求,即确定无人机初始状态集与目标状态集之间的映射关系f(i,j):

2 制导算法设计
2.1 协调段航迹规划算法
传统Dubins方法生成的航迹可能出现直接穿越防御射界的问题,文献[28]给出的变半径避障Dubins航迹生成方法,在传统方法的基础上添加了一段圆弧,得到了不进入防御射界的前提下的最短路径,如图3所示,路径由始末圆弧、附加圆弧、连接直线组成,分别用C1,S1,ARC,S2,C2,表示.改进Dubins航迹按照初始圆和终止圆转向划分为四种情况,图3表示了一种初始圆右转、终止圆左转的航迹.

图3 改进的Dubins航迹生成方法Fig.3 Improved Dubins track generation method
为了保证所有个体协调变量的同时收敛,需要进行等长路径搜索.将不同路径到达时间的标准差作为路径映射的特征参数,基于特征参数进行映射f(i,j)的搜索与更新,特征参数Sf(i,j)表达式为:


其中,lf(i,j)_n和tf(i,j)_n分别为第n架无人机在当前映射f(i,j)下的路径长度和到达时间.对映射f(i,j)的搜索与更新主要遵循以下原则:①在保证收敛精度的前提下提高收敛速度;②单机的路径长度尽可能短;③寻求可行解而非最优解.变半径Dubins算法对最大转弯半径不做限制,选取目标相位φ和转弯半径r作为航迹搜索的调整变量,给出如下双层迭代搜索策略.
(2) 内层:根据外层当前生成的搜索序列,各机基于变半径Dubins方法计算对应的四种路径长度,并取最短的一条路径作为备选;而后计算所有无人机备选路径的平均长度,除以平均飞行速度得到平均飞行时间;各机备选路径长度除以平均时间得到本机期望速度,若期望速度小于最小飞行速度,则在下次循环时增加本机转弯半径,若某架飞机期望速度大于最大飞行速度,则增大该机以外所有无人机的转弯半径;计算并更新特征参数,直至满足收敛条件或到达最大迭代次数.
考虑到变半径Dubins航迹规划方法的特点,从任意位置出发到达防御射界上位置状态的路径的长度并无上界约束,意味着可以通过调整初始圆或者终止圆的半径得到任意长度的路径(不小于最短路径).因此不考虑搜索实时性的前提下,在解空间内必然存在不少于一个的可行解使得集群能够达到路径长度的协同,亦即时间协同.随着集群规模的扩大,迭代搜索空间迅速增大,双层迭代搜索策略可以尽可能提高求解搜索的收敛速度.本文的协调算法寻求可行解而非最优解,适当放宽变半径Dubins方法中最大转弯半径的限制可以有效的提高收敛速度,并且末制导段采取了变导引系数的时间控制制导律,可以在一定程度上消除协调段搜索带来的路径长度误差,实现时空协同打击.
2.2 末制导算法
如图4所示,小型无人机在三维空间内飞行,将比例导引律分别应用于小型无人机的纵向通道制导和横侧向通道的制导.

图4 三维协同攻击示意图Fig.4 3D engagement geometry of the cooperation attack

距离矢量变率为:

其中,r为三维距离,rx,ry,rz和分别为距离和距离变率在惯性坐标系内的分量.在纵向平面上,采取定常系数比例导引律,在横侧向平面,采取时变导引系数导引律:
其中,azc=NzVCpitch,ayc=yVCyaw,为制导律计算得到的不限幅加速度指令,azcmax,azcmax为对应的加速度指令的最大限幅.azM,ayM分别为控制系统实际给出的加速度指令,Nz,y为导航参数,Nz通常取3~5,y按照式(4)~(6)计算得到,所有无人机初始导引参数保持一致.
3 算法仿真验证
3.1 算法流程
基于第2节的制导算法,给出算法流程如图5所示.
图5 分段制导算法流程Fig.5 Segmented guidance algorithm flow
算法流程中,η1为第n架无人机路径时间与集群平均路径时间之差的阈值,η2为特征参数Sf(i,j)的阈值,rf(i,j)_n和rf(i,j)_n_max分别为第n架无人机当前转弯半径和最大转弯半径,Δr为表示循环不满足阈值要求后转弯半径的增量.实际飞行过程中由于环境因素、路径跟踪误差影响,需要每隔一段时间检查当前集群编队的特征参数,如果超过阈值,以当前时刻作为初始时刻开始重规划.当集群按照协调段规划航迹飞行达到R,σ状态一致收敛后,同时切换至末制导,按照比例导引方法计算控制指令,对目标发起打击.
3.2 仿真算例
算例一
设定集群飞行速度为60 m·s-1,三机集群的初始状态集为P1=([0 m, 0 m], 3 0°, 50 m),P2=([850 m,-100 m], 9 0°, 50 m),P3=([850 m, 850 m], 1 35°, 50 m),目标坐标为(400 m, 400 m),防御射界半径为R*=250 m,协调速度前置角σ*=45°.末制导段期望飞行时间为5 s,无人机最大可用过载为4g.特征参数阈值η1=0.5,η2=0.8.由于协调段飞行的误差积累会导致各机到达防御射界的时刻略有不同,在仿真中,设置末制导切换时刻为第一架无人机到达防御射界的时刻.
在导引系数N=4的比例导引下,集群的航迹如图6(a)点划线所示.各机飞行过程中的相位差Δφ相对于理想值 120°的最大偏差达到31.7°,相对偏差为26.4%;最长飞行时间与最短飞行时间之差ΔT=3.41 s,分别为各机飞行时间的36.1%, 29.2%,26.5%.结果说明打击全程仅靠比例导引律制导下,各机空间分布不均匀,相对飞行时间存在较大的偏差.将本文前述方法应用于集群攻击后,航迹如图6(a)实线所示,最长飞行时间与最短飞行时间之差缩短为0.03 s.从制导段切换的细节放大图像看,采用协调算法后,末制导切入的速度前置角基本收敛到 σ*,误差小于1°.末制导段各机飞行航迹呈现空间相对坐标的对称同步变化,飞行全过程相位差不超过3°,飞行时间也基本保持一致,验证了1节中比例导引的弹道唯一性结论.从末制导弹道来看,在变系数导引律的作用下,无人机主要在前半段弹道调整航向以实现飞行时间的收敛,各机最大过载为2.7g;后半段弹道较为平直,过载较小,保留了较强的机动能力,具备对机动目标跟踪的潜力.

图6 仿真结果.(a) 三机σ*=45°分段制导仿真结果; (b) 四机σ *=0°分段制导仿真结果Fig.6 Simulation results: (a) 3-UAVs segmented guidance when σ *=45°; (b) 4-UAVs segmented guidance whenσ*=0°
算例二
四机集群的初始状态集P1=([0 m, 0 m], 3 0°, 50 m),P2=([750 m, -100 m], 9 0°, 50 m),P3=([800 m, 800 m],135°, 50 m),P4=([100 m, 850 m], - 45°, 50 m),协调速度前置角 σ*=0°,其余参数与算例一保持一致.集群的航迹如图6(b)所示.
比例导引下各机飞行过程中的相位差 Δφ相对于理想值90°的最大偏差达到26.4°,相对偏差为29.3%;最长飞行时间与最短飞行时间之差ΔT=1.85 s,为最短飞行时间的19.6%.将本文前述方法应用于集群攻击后,航迹如图6(b)实线所示,最长飞行时间与最短飞行时间之差缩短为0.05 s.从末制导弹道来看,与算例一类似,在前半段完成大幅度的航向调整,各机最大过载为3.3g;后半段基本指向目标平直飞行.
上述两个算例中,采用协调算法虽然一定程度上增加了集群的飞行时间,但相比于仅采用比例导引律的飞行仿真结果,集群的时空协同性大大提高.基于VS2010编译环境实现本文算法,在windows7系统、intel i7-9700F处理器、16 GB内存的计算机上进行100次仿真,上述两个算例的平均运行时间分别为31 ms, 72 ms,可以实现在线规划,并且可以推广到更大规模的无人机集群.经大量仿真,对于不同数量、不同初始条件的集群,本文所提出的协调算法均能给出合理的航迹.
4 飞行验证
4.1 集群协同打击验证系统
集群协同打击验证系统的硬件部分主要由飞行平台、地面站终端、通信数传设模块、模拟目标组成,其总体架构如图7(a)所示.
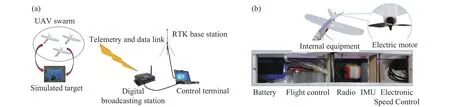
图7 系统组成.(a) 协同打击验证系统架构; (b) 模型机设备情况Fig.7 System construction: (a) architecture of the collaborative attack verification system; (b) installation of the model UAV
选择泡沫模型机作为飞行验证的基本平台,采用手抛起飞、滑跑降落的起降方式,具备多次起降飞行的能力,飞行成本低廉.模型机的主要硬件有自驾仪、红外导引头、导航定位与测速设备、通信数传电台、全电动力系统等,其外观与主要设备安装情况如图7(b)所示.模型机通信与数传采用433 MHz无线电台,硬件系统基于有线与无线连接进行局域网组网.试验时为降低成本,模型机未安装导引头,采用GNSS定位信息对导引头测量信息进行模拟.
4.2 航线设计
考虑到试验成本,试验采取三机编队,为便于现场指挥,指定一架为长机,另外两架分别为僚机1与僚机2.以地面站为原点,给出飞行试验相关点相对坐标如表1所示,设计打击试验航线如图8所示,主要包含以下三部分:
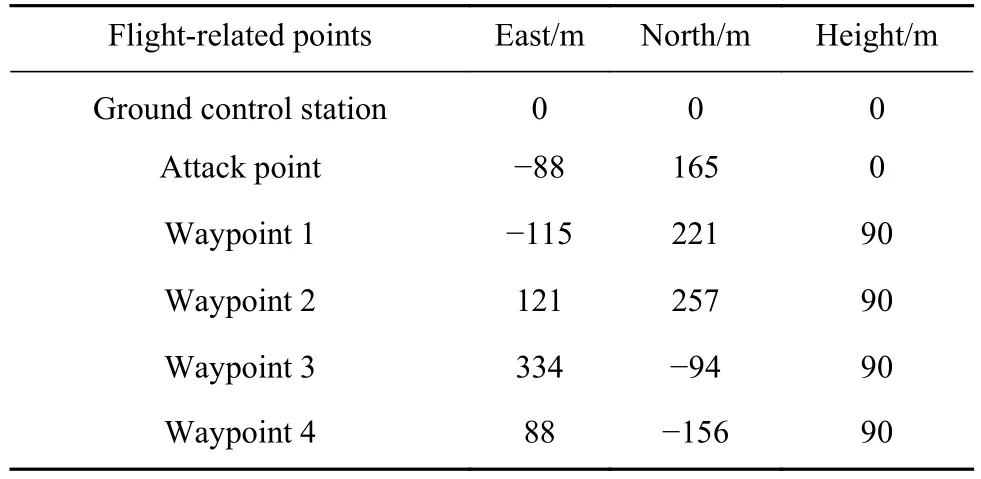
表1 飞行相关点的相对坐标Table 1 Relative coordinates of flight-related points
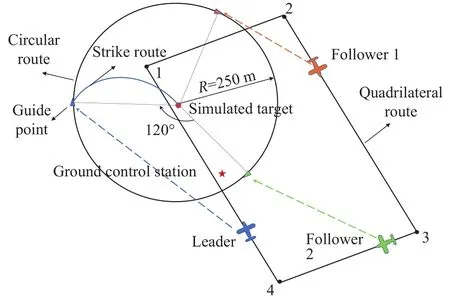
图8 试验航线设计Fig.8 Verify the flight route design
1)四边形航线.该航线用于无人机集群起飞后在空中盘旋待命使用,1,2,3,4分别为航线的四个航路点(Waypoints),考虑到飞行空域限制,四边形航线有一部分位于模拟目标防御射界内,在实际作战飞行时,启动中制导航线规划与飞行时集群应均位于敌方防御射界外,不存在某些个体提前进入的情况;
2)顺时针圆航线.考虑到试验的不确定性,取σ=90°,即集群沿圆切线切入后进行圆盘旋调整,消除协调段过程中由于环境因素带来的误差.同时参考文献[29]进行集群协同观测,提高对目标的定位精度,获取相对二维距离R.本文未考虑避撞问题,采取各机从不同高度进入圆航线的策略,打击发起前调整至同一高度.
3)打击航线.如图所示,当集群空间分布满足比例导引时间协同的要求后,集群自主启动打击或者由地面站判断并上传打击开始指令,三机同时切换至打击模式,开始俯冲打击,直至命中目标.
地面站大致位于飞行区域的中心位置附近,便于目视观察和指令数据的传输.飞行试验相关的点的坐标如表1所示.
4.3 试验结果
飞行试验数据由自驾仪记录,写入机载存储设备并经由无线链路下载至地面站终端,读取最后一次三机对地打击的试验数据,最终绘制得到3机编队的各类轨迹和数据图表.
由于长机最早起飞,以长机起飞时刻为零时刻基准,下文所述时间均采用此基准.在飞行第183 s后各机开始进行队形变换,由四边形航线切换至等相位圆盘旋航线.图9(a)显示了t=248.4~268.4 s时刻内3机编队顺时针接近圆周等相位分布的过程.以长机当前相位为基准零位,逆时针方向相位为正,僚机1、僚机2的参考相位分别超前和滞后 120°,记为±120°.由飞行数据得到队形变换过程中僚机的实际相位的变化情况如图9(b)所示,可以看到相位误差在期望值附近存在30°左右的周期性变化,打击发起时刻(t=348 s)相位偏差约为5°.误差的来源主要有两方面:一方面模型机的飞行性能较弱,其巡航速度约为18 m·s-1,速度调节与舵面控制能力有限;另一方面由于试验当天存在持续的西南风(约3 m·s-1),风场对模型机的飞行存在较大的影响.模型机在强风环境下航线跟踪精度降低,未严格按照圆航线飞行.

图9 协调段飞行数据.(a)协调段二维航迹; (b)僚机相对相位变化Fig.9 Flight data of the coordination phase: (a) 2D track of the coordination phase; (b) relative phase change of wing UAVs
协调段的主要目标除了保证集群等相位分布外,还有R,σ一致性要求.三机经协调段飞行后打击发起时刻的协调变量偏差的具体值如表2所示.图10分别给出了200 ~ 350 s内R,σ收敛过程的示意.图10(a)显示在约275 s时各机到目标二维距离基本收敛到250 m左右,打击发起时刻二维距离偏差最大为10.5 m;图10(b)中 σ取值范围为 [0,2π],逆时针为正,各机前置角在约250 s时基本收敛后存在约±10°的浮动,打击发起时最大误差约为8.5°.考虑到外部环境的影响,R,σ的收敛情况在误允许范围内,表明了协调段控制的有效性.
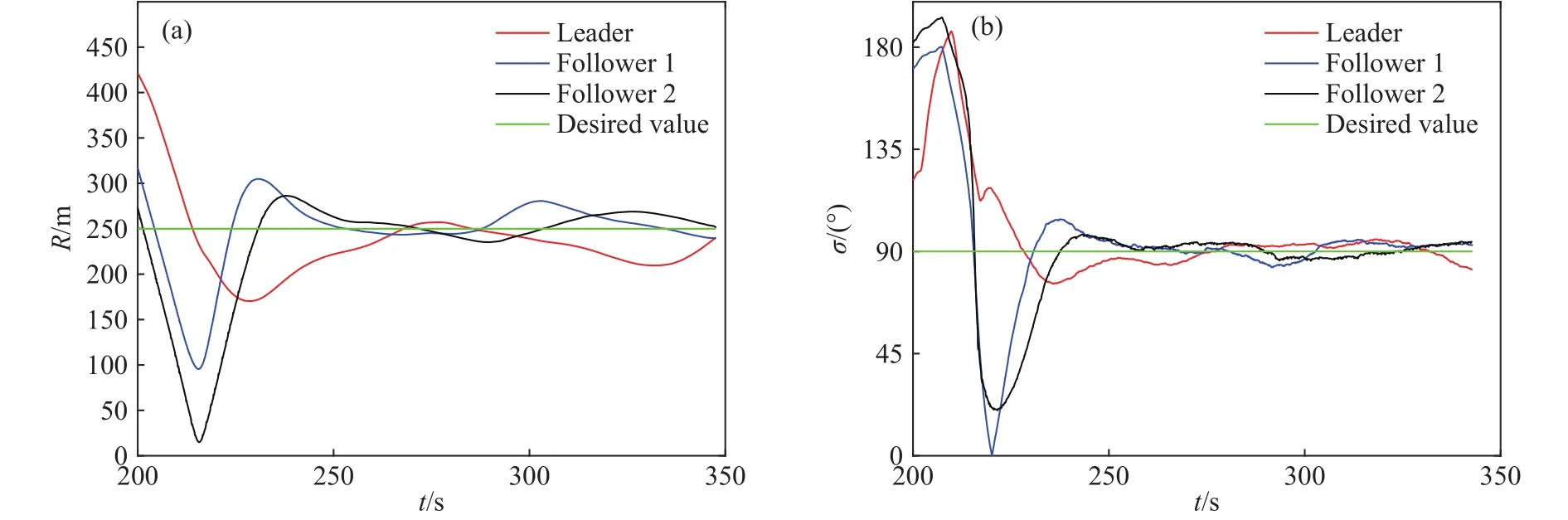
图10 协调变量.(a) 二维距离R变化;(b) 速度前置角σ 变化Fig.10 Coordinated variables: (a) change process of the 2D distance; (b) change process of the velocity leading angle

表2 打击发起时刻协调变量偏差Table 2 Coordinate variables deviation at the attack initiation time
图11(a)显示了部分圆盘旋过程和末制导段飞行二维航迹.如图11(b)所示,t=300 s时地面站发送等高度切换指令后各机很快调整到同一高度,在t=348 s时,地面站发送打击开始指令,各机同时调整航向,迅速指向目标,发起俯冲打击.从三维航迹可以直观地看出三机调整到相同的高度并发动协同打击的全过程.三机飞行航迹具有较好的一致性,在飞行全程中保持了均匀的空间相位分布.
图11 末制导段航迹.(a)末制导段二维航迹; (b) 末制导段三维航迹Fig.11 Track of terminal phase: (a) 2D track; (b) 3D track
利用旋翼机定点拍摄的三机同时飞向目标的特写以及最终命中目标的情况分别如图12所示.从图12(a)可以直观地看出三机从不同方向等相位间隔飞向目标,较小的时间偏差命中目标.从图12(b)中各机命中时和目标上靶心标记的相对位置可以看出三机打击的水平偏差和高度偏差很小.

图12 实拍图像.(a)打击前一时刻各机位置; (b) 打击瞬间图像Fig.12 Real images: (a) positions of UAVs at the moment before striking; (b) images of an instant hit
三机的打击空间偏差和飞行时间的具体值由表3给出.可以看出,高度和水平方向偏差均小于0.5 m,命中精度较高.末制导段最早到达时间和最晚到达时间差为1.3 s,考虑到试验过程中由于外部风场等误差因素的影响,这样的时间偏差相比于仅采用比例导引制导的方案而言是比较小的,时间协同性明显提升.
表3 末制导段飞行时间和空间偏差Table 3 Flight time and space deviation of the terminal phase
5 结论
集群协同作战是未来无人作战的重要形式,本文以比例导引的弹道唯一特性为基础,基于协调变量把打击任务过程划分为协调段和制导段,将复杂的协同制导问题降维,分别设计了协调段航迹规划和末制导段协同控制算法,在求解精度和实时性上具有明显优势.从试验结果看,多UAV集群可以实现协调变量一致收敛,打击时间和空间精度较高,表明了算法的有效性和集群协同打击系统设计的合理性,为多机协同打击提供了一种通用的解决方案.下一步将引入集群对目标的协同观测,实时估计目标的运动状态,基于观测获得的目标位置、速度等信息,将本文算法与碰撞点预测方法结合,实现对运动目标的协同打击.
