含大规模风电电力系统的安全稳定风险预防控制方法
2022-07-12鲍颜红张金龙衣立东徐泰山任先成
鲍颜红,张金龙,衣立东,徐泰山,任先成,吴 峰
(1. 南瑞集团有限公司(国网电力科学研究院有限公司),江苏省 南京市 211106;2. 智能电网保护和运行控制国家重点实验室,江苏省 南京市 211106;3.国网宁夏电力有限公司,宁夏回族自治区 银川市 750010)
0 引言
随着风电的迅猛发展,风电并网规模逐渐增加[1],风电出力不确定性给电力系统安全稳定分析与决策带来极大的挑战[2-4]。基于确定性的传统方法难以应对不确定性对系统安全经济运行的影响。风险理论通过量化随机事件发生的可能性和严重性,可以有效量度不确定性因素对系统整体的影响,保证系统的风险水平在可接受范围内。
对于新能源出力不确定性的处理,通常采用置信区间法[5-6]或场景法[7-10]:区间法基于一定的置信水平决定不确定量的上下边界,生成电力系统大、小运行方式进行分析计算,存在计算结论过于保守的问题;场景法能够对新能源不确定变量进行抽样,产生可能出现的场景,通过多个确定性场景来表征不确定变量,针对每个场景进行安全稳定分析计算获得该场景的运行风险,综合所有场景运行风险获得系统安全稳定运行风险。
预防控制通过改变当前运行点防止事故发生后可能造成的系统安全稳定问题,增加了正常运行的费用,收益与是否发生故障和故障后果直接相关,因而选择最佳控制策略具备博弈的本质特征[11]。在运行方式安排的风险决策应用方面,文献[12]提出通过在优化模型的目标函数或者约束条件中计及概率风险指标,实现对新能源电力系统规划和运行中不同层次风险决策的有效指导。目前,通常采用的不确定优化方法主要包括随机优化[13-14]和鲁棒优化[15-16]两类。随机优化在处理的离散场景规模较大时求解时间较长。鲁棒优化通过设定不确定参数的波动范围,寻求最恶劣场景下的决策方案,存在控制代价过大的问题。满足安全稳定要求的预防控制策略计算是复杂的高维非线性规划问题,实际大电网安全稳定问题具有高维、强时变、强非线性的本质,相对采用数学规划的求解方法,基于控制性能指标的启发式方法易于满足实际应用中对于计算方法适应性和计算速度的需求,得到更广泛的应用[17-18]。
对于考虑风电出力不确定性存在安全稳定运行风险越限的场景及故障,本文提出了一种安全稳定风险在线预防控制方法。参照电力系统事故等级评价标准将允许的运行风险转化为机会约束条件,在此基础上建立了包括限制风电集群出力弃电风险的预防控制措施控制代价最小目标优化模型。基于集群并行计算平台采用并行隐式枚举校核获得满足目标函数的控制措施。
1 风险指标
1.1 弃电风险
对于风电不确定性,一般将预测误差处理为正态分布的随机量。假设某风电场预测功率X的概率分布如图1 所示,其中X~N(μ,σ2)。

图1 风电场预测功率概率分布示意图Fig.1 Schematic diagram of probability distribution of predicted power of wind farm
预防控制通过改变当前运行点将系统安全稳定运行风险降低至可接受范围,限制风电出力和降低送电端火电机组出力是常用的控制措施。若限制风电场A 的最大功率为Plim,A,则其弃电风险fR为:

式中:fA(x)为风电场预测功率的概率分布函数。风电功率预测误差下限与上限值通常为3 倍标准差,当限制最大功率为μ+σ时,弃电风险如图1 阴影所示。
风电大规模开发、集中并网是目前高比例风电电网的主要形式,可以把对系统安全稳定影响接近的风电场站聚类为一群,并以风电集群为单元计算弃电风险并进行控制,群内风电场站可按保守或等比例原则分摊调整量。其中,风电集群的功率区间及概率,可以在风电场预测出力区间及概率的基础上,通过概率潮流计算获得。通过聚类分群可实现不确定性变量有效降维,大大减少控制场景数目,提高计算效率。
1.2 安全稳定风险
预想故障k的安全稳定运行风险计算式如下:

式中:Rk为故障k的安全稳定运行风险;Pck为预想故障k发生的概率;k∈CS,CS为所有预想故障集合;ST为聚类后的所有类场景子集集合;ρm为第m类场景子集中所有场景概率之和;φmk为第m类场景下故障k的严重度。
预想故障集合包括所有可能存在安全稳定运行风险且故障概率大于门槛值的故障,为简化分析仅考虑线路的首末端故障,对考虑概率分布的风电不确定出力进行抽样获得风电场出力场景,系统安全稳定运行风险为预想故障集合中所有故障安全稳定运行风险之和。
对预想故障进行时域仿真计算可以获得系统是否安全稳定的定性结论,当系统保持安全稳定时可以认为其不存在安全稳定运行风险。采用扩展等面积准则(EEAC)量化分析等方法可以定量评估安全稳定裕度,但系统安全稳定裕度的强非线性特性导致运行工况的较小变化会引起裕度的突变,因而其作为风险评估的故障严重度指标并不合适。实际上如果系统故障后无法保证其安全稳定性,故障后的动态导致保护和安全控制动作切除机组和负荷,最终会过渡到与初始状态不同的安全稳定状态。相对而言,故障越严重,故障发生后切除的负荷总量和机组总量越大,因此采用某一场景下故障造成的负荷损失和切除机组量作为故障严重度指标是一个相对合理的选择。
按照上述方法可以计算系统安全稳定风险,当运行风险越限时进行预防控制,但由于难以合理确定运行风险门槛值,因而影响其实用性。可以参照电力系统事故等级评价标准确定允许的最大切除机组量和切负荷总量,将系统允许的运行风险转化为如下机会约束条件:

式中:i=1,2,…,nlc,nlc为负荷安全等级总数;Pr(·)为概率函数;α为设置的机会约束置信水平;ΔPwg(k,m)和ΔPld,i(k,m)分 别 为 第m类 场 景 下 故障k发生后切除机组总量和切除不同安全等级负荷总 量;k∈CS,CS为 所 有 预 想 故 障 集 合;Pwg,lim和Pld,lim,i分别为允许的最大切除机组总量和不同安全等级切负荷总量。
在暂态安全稳定评估的故障时域仿真计算中考虑第二道防线安全控制装置和第三道防线低频低压减载、解列装置动作建模,统计故障直接引发和第二、三道防线安全自动装置切除负荷损失、切除水火电机组以及风电机组脱网量;同时考虑风电机组频率和电压保护动作切除的风机总量,获得故障后暂态过程切除的负荷总量和机组总量。若故障后系统过渡到稳态时依然存在支路过载和断面越限等静态安全问题,采用文献[19]方法进行紧急控制策略搜索计算获得需要切除的负荷总量和机组总量,将其与暂态过程对应值相加作为该故障发生后切除的负荷总量和机组总量。
2 含风电的风险预防控制模型
通常含大规模风电电力系统安全稳定问题与输电通道输送功率相关,当输送功率过大时存在安全稳定问题,导致风机脱网和损失负荷。降低送电端水火电机组出力和限制风电出力,以及为平衡功率同步增加受电端水火电机组出力是常用的控制措施。由于在预防控制中采取限制可中断负荷的控制代价过大,而且一般情况下通过调整或限制机组出力即可满足要求,因此本文不考虑限制负荷的控制措施。
2.1 目标函数
考虑优化目标为预防控制措施的控制代价最小,包括调整水火电机组出力的控制代价和限制风电集群出力的弃电风险,有

式中:NG为水火电机组总数;NW为风电机组总数;和分别为水火电机组g提供上调和下调功率的单位报价;和分别为水火电机组g被调用的上调和下调功率;Pw,lim,j为风电集群j受限的最大出力,fR(Pw,lim,j)为对应的弃电风险;λW为风电弃电代价因子。
2.2 约束条件
预防控制模型中的机会约束条件见式(3)、式(4)。其他确定性约束条件如下。
1)潮流平衡约束
采用交流潮流方程如下:
式中:m∈ST;i,j∈SN,SN为系统所有节点集合;、、、、分别为节点i在场景m的水火电机组有功出力和无功出力、风电场有功出力和无功出力、有功和无功负荷功率;Vim、θim分别为节点i在场景m的电压幅值、电压相角;Yij、αij分别为节点导纳矩阵的幅值、相角。
2)水火电机组出力约束

式中:Pg,max和Pg,min分别为水火电机组g的出力上限和下限;Pg,0为水火电机组g的当前出力;和分别为水火电机组g的爬坡和滑坡速率;Δt为调度时间。
3)风电集群出力约束

式 中:Pw,min,j为 风 电 集 群j的 有 功 出 力 允 许 下 限;Pw,max,j为预测的风电集群j的有功最大出力。
4)功率平衡约束

式中:Pw,0,j为风电集群j的当前出力。
5)系统备用约束

6)系统安全约束

式中:Iijm为在场景m的节点i和节点j之间支路电流有 效 值;Iij,max为 支 路 电 流 额 定 值;Vim为 在 场 景m的节 点i电 压;Vi,min和Vi,max分 别 为 节 点 电 压 下 限 和上限。
上述约束条件主要包括预防控制措施采取后的潮流平衡约束和对控制措施的约束,除此以外,约束条件还包括上文所述的安全稳定风险机会约束条件式(3)和式(4)。虽然式(3)和式(4)没有显式表示系统安全稳定性,但已将系统安全稳定运行风险要求转化为允许的最大切除机组量和切负荷总量机会约束条件,通过寻找最小控制代价的控制措施满足系统安全稳定约束。式(3)、式(14)共同构成安全稳定风险预防控制模型,该模型为机会约束规划问题。
3 模型求解
求解机会约束规划的传统方法是把机会约束转化为各自确定的等价类,然后用确定性规划的方法求解。上述考虑安全稳定风险约束的数学优化模型,除了常规的代数微分方程外,还需要用差分方程和逻辑语句来描述第二、三道防线等动作事件,本质上为逻辑-差分-微分-代数方程,含有强非自治性、强非线性,其求解不可能脱离数值积分,如故障后存在静态安全问题还需要进行紧急控制策略搜索计算,因而难以将将机会约束规划转化为确定性规划问题。而通过随机模拟技术处理机会约束条件,并利用遗传算法、粒子群算法等求解的启发式方法,由于计算时间过长而难以满足在线应用需求。
在当前的在线动态安全分析(dynamic security analysis,DSA)系统中通常利用分布式并行计算技术,采用同构的计算节点组成计算集群,将多个场景和故障分析计算的繁重任务分配到计算集群的计算节点上进行并行计算,然后在管理节点上汇总计算结果。目前大规模集群并行计算平台具有强大的计算能力,计算节点可用的核数目达到上千个。
本文基于集群并行计算平台,通过计算水火电机组和风电集群控制性能指标,设计了求解上述机会约束规划的并行计算方案,可以满足在线应用需求。
3.1 控制性能指标
采用EEAC 量化分析方法[20]能够获得预想故障下电网的暂态安全稳定裕度和模式,进一步可以得到安全稳定模式中元件的参与因子[21]。
依据安全稳定裕度、模式和元件的参与因子,以及过载元件的静态灵敏度,文献[17]定义了水火电机组出力调整的静态安全和暂态稳定控制性能指标,由此可以定义如下水火电机组出力调整的综合控制性能指标:

式中:Ig为水火电机组g有功出力调整的暂态和静态安全稳定综合控制性能指标;Ig,ta和λ1分别为暂态稳定控制性能指标和权重;Ig,ol和λ2分别为静态安全控制性能指标和权重。通常情况下暂态稳定控制措施也有利于改善过载元件的静态安全,因此可以优先考虑暂态稳定控制,λ1取较大值,λ2取较小值,具体取值根据实际电网情况确定。
当暂态功角稳定裕度较低时系统功率、电压和频率大幅波动会引发切除负荷、水火电机组和风机脱网,而输电线路过载严重时也需要切除更多的机组和负荷,由于故障发生后切除的负荷、水火电机组总量和风机脱网量与安全稳定裕度强正相关,因此上述定义的控制性能指标也可以作为安全稳定风险的控制性能指标。
风电机组本身并不参与同步机群的摇摆,主要通过改变同步机群间的功角差,影响系统的暂态稳定性,其中关键影响因素为风电机组与同步机群的相对距离,文献[22]定义了分别处于临界机群(S 机群)和余下机群(A 机群)风电机组的暂态功角稳定参与因子。获得风电机组参与因子后,可以基于参与因子进行风电场站聚类,将各个故障以及故障多个模式下参与因子均相近的风电场站聚类为一群,聚类后的风电集群参与因子可取为其中各个风电场参与因子的平均值,之后即可计算风电集群的控制性能指标。
3.2 求解过程
计算各火电机组和风电集群的控制性能指标后,可以按照设定的门槛值筛选获得有效控制措施。
将式(17)定义的综合控制性能指标除以单位调节量的控制代价可以得到综合性能代价比指标。对于水火电机组而言,为了满足控制目标式(5)的要求,将增出力机组和减出力机组按照控制性能代价比指标从大到小的顺序依次进行控制,可以获得接近控制代价最小的控制方案。由于不同风电集群的弃电风险差异较大且与采取的控制量相关,因此难以预先确定各风电集群的控制顺序。为了获得满足式(5)要求的控制方案,采用组合优化方法,对水火电机组、各风电集群分别按照控制精度要求形成控制量由小到大的若干控制方案。然后,在水火电机组、各风电集群控制方案之间进行枚举组合,删除不满足优化模型中确定性约束条件的组合,由此形成所有可能的控制方案,即可从中寻找控制代价最小的控制方案。
基于集群并行计算平台,在每一个控制方案下进行存在安全稳定风险的场景及其预想故障的并行安全稳定评估计算,可以获得故障发生后切除的负荷总量和机组总量,统计所有场景及其预想故障的损失负荷总量和机组总量及其对应的发生概率,即可判断是否满足式(3)和式(4)的机会约束条件。在所有满足机会约束条件的控制方案集合中按照目标函数式(5)选择最终的控制方案。
如对所有可能的控制方案均进行计算则计算时间难以满足在线应用的要求。引入并行正则采样排序(PSRS)算法对目标排序法进行并行化[23],实现了控制方案安全稳定风险评估计算的并行隐式枚举,步骤如下:
步骤1:基于改进的PSRS 算法对所有可能控制方案按照目标函数值由小到大的顺序进行排序,将所有控制方案按顺序均匀抽样并分配至P个计算节点。
步骤2:各计算节点按目标函数值递增顺序进行控制方案j下预防控制场景及其故障的安全稳定评估计算,多个预防控制场景及其故障计算可在计算节点的多个CPU 上并行进行,之后判断机会约束条件是否满足,若不满足,则j++,转步骤3;若满足约束条件则发送目标函数值给其他计算节点,并停止计算。
步骤3:若计算节点收到其他计算节点发送过来的目标函数值,则将目标函数值和当前正在计算的值进行对比。若当前计算的目标函数值已经大于其他计算节点发送的目标函数值,则停止计算并发送消息通知管理节点,转步骤4;若所在计算节点还有可能找到最优解,则继续进行步骤2。
步骤4:对于管理节点,若收到了所有计算节点的结束通知,则找出所有计算节点中目标函数最小值即为最优值,其所对应的控制方案为问题的一个最优解。
4 算例仿真验证
以DSA 系统中某断面时刻t0在线数据为例,含大规模新能源的某省级电网局部网络示意图如图2所示。图中:风电场W1 至W6 通过B2 厂站汇集入网,W7 至W10 通过B3 厂站汇集入网。图中330 kV及以上电压等级线路有功潮流对应未来t0+15 min的基本运行方式(风电预测功率取期望值),根据风电功率预测系统实际应用情况,风电功率预测均方根误差取为10%。

图2 局部电网示意图Fig.2 Schematic diagram of part of power grid
在线DSA 系统考核的预想故障数目为234 个,基于DSA 安全稳定风险评估结果,选取存在安全稳定风险的“B2-B3 双回N-2 故障”为例进行分析。
B2-B3 双回线故障后存在暂态稳定问题,振荡中心位于B8-B9 双回线(上述4 回线组成割集断面),基于EEAC 进行量化分析可知,B1、B2、B7、B8等送端电网的机组属于临界群,B3、B6、B9 等受端电网的机组属于余下群。计算各风电场的暂态功角稳定参与因子并基于参与因子进行风电场聚类,W1至W6 和W7 至W10 可以分别聚类为一群,聚类后的风电集群参与因子如表1 所示。

表1 风电集群暂态功角稳定参与因子Table 1 Transient angle stability participation factor of wind power cluster
除了暂态稳定问题外,B2-B3 双回线故障后潮流转移至B8-B9 线路引起过载,位于临界群的W1至W6 风电场出力是影响B2-B3 双回N-2 故障下场景聚类和安全稳定风险的主要因素。基于W1 至W6 风电场出力的联合概率分布(μ=783.9,σ=40.83)进行抽样,获得风电场出力场景并聚类,对每一聚类场景进行故障时域仿真计算和静态安全紧急控制策略搜索计算,获得故障造成的负荷损失和切除机组量并将其作为故障严重度,而后基于式(2)计算故障k的安全稳定运行风险(故障概率Pc,k取值为0.8)。经计算可得,临界群风电集群不同出力场景的概率及其安全稳定风险如图3 所示,临界群风电场不同出力场景下的发电负荷损失总量及其累积概率分布如图4 所示。

图3 风电场出力概率分布及安全稳定风险Fig.3 Probability distribution of wind farm output and security and stability risk
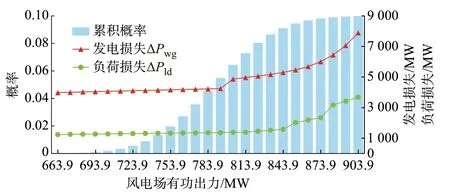
图4 发电和负荷损失及累积概率分布Fig.4 Power generation and load loss and cumulative probability distribution
式(3)、式(4)中的Pwg,lim、Pld,lim,i和α分别取值为4 200 MW、1 700 MW、0.9,由图4 可知Pr(ΔPwg<4 200 MW)=0.27、 Pr(ΔPld<1 700 MW)=0.91,即式(3)不满足要求,需要进行预防控制满足机会约束要求。
考虑15 min 为一轮控制周期,并结合电网风火上网电价,取目标函数式(5)中火电机组单位控制代价为93.75 元/MW、风电机组单位控制代价为202.5 元/MW、风电弃电代价因子λW为5.0。依据式(15)计算的部分候选控制措施综合控制性能指标和可调空间如表2 所示。表2 中,“子网1_Gx”表示子网中的发电机组x。

表2 部分候选控制措施综合控制性能指标和可调空间Table 2 Comprehensive control performance indices and adjustable spaces of some candidate control measures
对部分满足机会约束条件的控制方案下采取不同控制措施的目标函数进行对比,情况如图5 所示,最优控制方案为方案4,具体为:子网1_G1 火电出力减少30 MW,限制B2 厂站W1 至W6 并网风电上限为793.9 MW,承担3.56 MW 的弃电风险,子网2_G3 火电出力配套增加30 MW 以满足功率平衡约束;λW=5。另外,不同风电弃电代价因子下,最优控制方案变化情况如图6 所示,可见随着因子增大,更倾向于采取火电控制措施。

图5 不同控制措施下目标函数变化Fig.5 Change of objective functions with different control measures
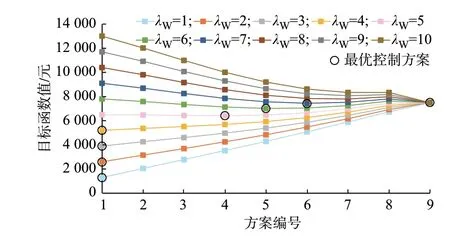
图6 不同λW 下最优控制方案变化情况Fig.6 Changes of optimal control schemes with different λW
本章案例分析在100 台计算节点上展开(单个节点配置为4 个主频为2.27 GHz 的E5520 CPU,共16 核,内存为8 GB,操作系统为Rocky 4.2),算法采用C++和Fortran 语言编写。
考虑任务并行计算能力为1 600,单个故障下场景聚类数目平均不超过20,风电集群聚类数目平均不超过10,单方式、单故障的静态和暂态安全稳定分析耗时最大约30 s,在线考核的234 个预想故障中存在安全稳定风险的预想故障占比不超过2.5%,则15 min 的决策周期内,最大可并行迭代30 轮,每轮校核约14 个方案,总可校核方案个数约420 个,考虑并行隐枚举策略,一般情况足以满足在线计算要求。
5 结语
本文考虑含大规模风电电力系统的不确定性,提出了一种安全稳定风险在线预防控制方法,能够为调度运行人员实时准确掌握系统安全稳定边界以及在线风险防控提供技术手段。
1)参照电力系统事故等级评价标准将允许的运行风险转化为机会约束条件,可以避免难以确定系统安全稳定运行风险门槛值的问题,此基础上建立包括限制风电集群出力弃电风险的控制措施代价最小目标优化模型,有助于促进新能源消纳。
2)在计算水火电机组和风电集群控制性能指标基础上,提出了一种求解机会约束规划的并行隐式枚举计算方法,计算时间可以满足在线应用需求。
鉴于互联大电网下热稳定、电压稳定、暂态稳定等多类安全稳定问题相互交织,下一步将深入研究如何提高在线风险预防控制计算的准确性和计算效率。
