急流条件下的水下检测系统运动响应分析
2022-07-11董睿文吴振磊
甘 进 董睿文 王 彬 吴振磊
(武汉理工大学船海与能源动力工程学院1) 武汉 430063) (武汉理工大学水下检测技术研究中心2) 武汉 430063) (武汉长江航道救助打捞局3) 武汉 430014)
0 引 言
随着长江水域不断地发展,长江水域中包括航道整治工程排体的搭接、桥梁水下墩柱的冲刷状况,以及大坝水下坝体的健康状态等亟须检测,以保证水下结构物的质量和安全.在流速大(流速超过1.5 m/s,可达3 m/s)的长江水域中进行精确且有效的检测难度极大.赵钢等[1]通过单波束扫描声呐对水下结构物扫测后发现,在受到风浪的条件下进行地水下检测难以反映水下结构物的真实情况.来记桃[2]研究发现在复杂和急流环境条件下进行的水下检测成果往往不够直观.
水下机器人(remote operated vehicle, ROV)是具有代表性的移动式水下检测装置,ROV技术成熟可靠,工作时间更长,已广泛应用于海上作业[3-5].ROV抗流性能弱,大多用于流速小的海域检测.长江水域流速大,水下检测系统要满足在急流条件下进行水下检测需要有较强的抗流性能,一般通过增强ROV动力装置或者增大ROV重量提高ROV的抗流能力,但增强动力装置的要求很高且价格昂贵,增大水下机器人重量又会使水下检测系统体积增大,受到更大的来流阻力.
长江水域中水质的浑浊会极大地影响到光学设备(如摄像机)的拍摄.声呐设备受到水质的影响较小,用ROV搭载声呐设备完成对水下结构物地水下检测是目前主流的使用方式,该方法检测的区域广、操作灵活、功能多,能够深入到水下复杂条件的海洋湖泊中进行检测.在声呐探测方面,图像声呐主要有:单波束扫描声呐、多波束前视声呐、三维成像声呐、侧扫声呐等[6].同时,声呐设备具有一定的重量,ROV搭载声呐设备会使得ROV的重量增加,会导致水下检测系统运动响应的增加.
基于此,文中开发一套急流条件下的水下检测系统,通过探究流速、张力缆刚度系数、来流角度对水下检测系统的影响,解决急流条件下水下结构物水下检测的难题,以保证水下结构物的质量和安全.
1 水下检测系统方案与使用方法
1.1 水下检测系统方案
急流条件下的水下检测系统主要包括ROV、抱缆装置、张紧型锚缆系统以及声呐设备四个部分,选取便携折叠式3 t吊机用以下放水下检测系统.整体设计方案见图1.
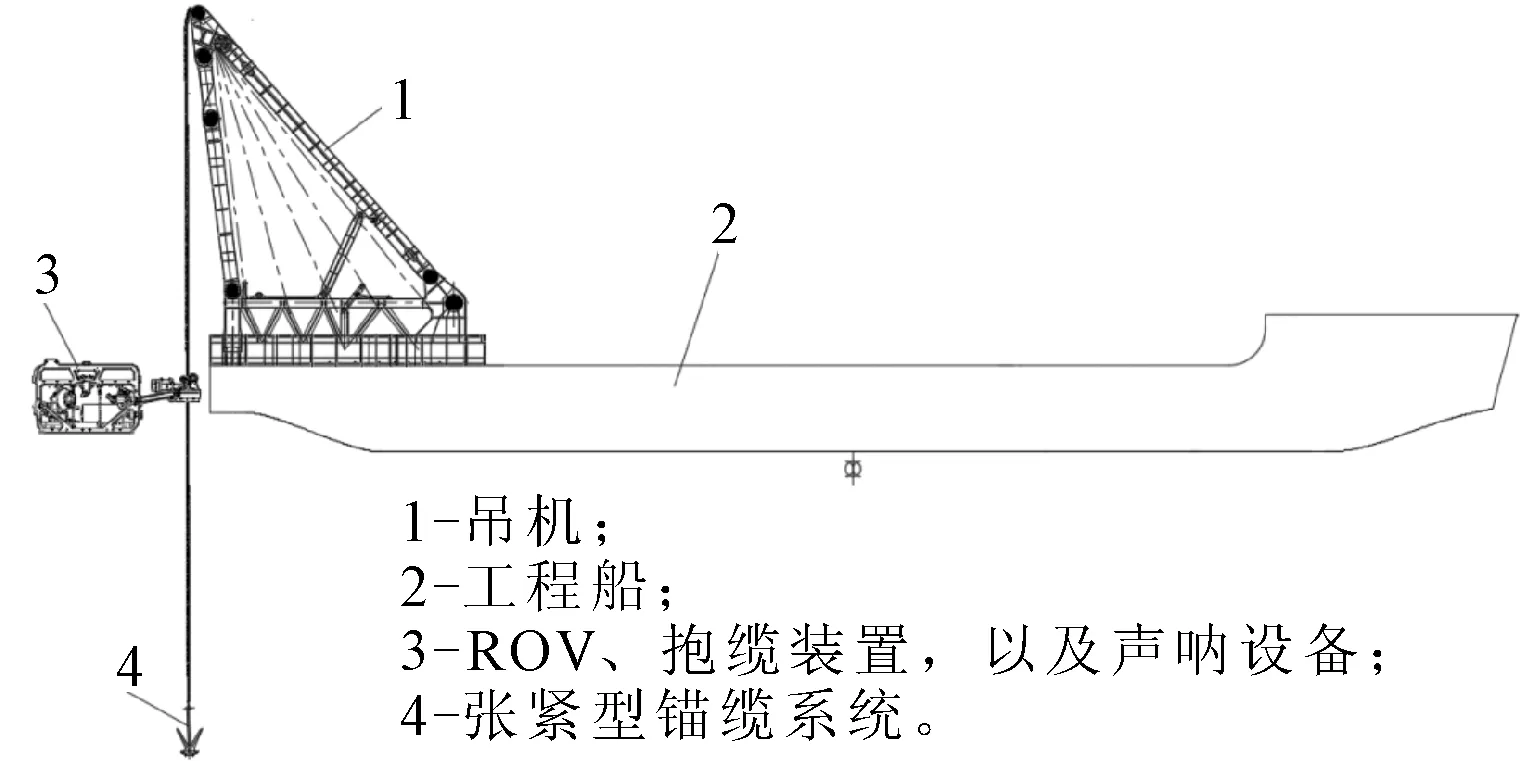
图1 整体方案设计图
在选取BlueView BV5000水下三维全景成像声呐设备的基础上,以“江豚”IV-C作为ROV部分的研究对象.ROV驱动主要有以下三种驱动方式[7]:①采用电机驱动滑轮沿张力缆滚动的方式实现ROV的升降;②通过改变ROV体积来改变其在水中所受浮力,从而实现ROV的升降;③采用螺旋桨驱动的方式实现ROV的升降.受到ROV驱动方式的启发,决定主要利用①③相配合对ROV进行驱动.为使水下检测系统在工作时保持稳定,该水下检测系统中应设计相应的锚缆系统避免ROV在急流下发生较大幅度地漂移以保证声呐设备的正常检测.在近海中多采用拉紧型、全锚链式系留方式、松弛式弹性系留方式.该水下检测系统用于急流条件下的长江水域,故设计了张紧型锚缆系统包括张力缆和锚体部分,锚体采用重量为2.5 t纯铁块,锚体可使张力缆的张力达到约20 kN.
张紧型锚缆系统中的张力缆选取18×19+IWS(钢芯)钢丝绳,表1为张力缆参数.

表1 张力缆参数
抱缆装置整体结构是以齿轮传动为主体的联动机构,依靠抱缆装置提供的摩擦力实现ROV与张力缆的相对固定,其具体结构见图2.主动齿轮、直流无刷电机、滚珠丝杆螺母副、从动齿轮、拉力传动杆共同构成了齿轮的联动机构,将电机所传递的扭矩转换成拉力,利用拉力传动杆将拉力传递到张力缆抱紧环之上,从而实现将拉力转换为压力传递给张力缆座,实现张力缆座与张力缆之间的摩擦固定.

图2 抱缆装置整体结构细节图
1.2 使用方法
步骤1对作业环境进行评估(包括流速、风速等),并完成对水下检测系统各部分的常规检测,保证水下检测系统各部分的正常运行.
步骤2完成ROV、抱缆装置、张紧型锚缆系统以及声呐设备的独立安装并运送至工程船上.
步骤3下放张紧型锚缆系统,控制吊机将锚体沉放到水底进行锚泊定位,使张力缆处于张紧状态成为ROV下运动的轨道,将ROV降到指定位置;
步骤4对ROV、抱缆装置、张紧型锚缆系统以及声呐设备进行连接安装,将声呐设备安装在ROV上,张紧型锚缆系统的张力缆与ROV通过抱缆装置相连接.待水下检测系统安装完毕后,启动吊机,通过吊机将水下检测系统移动到水下结构物处,利用ROV搭载的声呐设备对水下结构物进行快速且有顺序地扫描,实现整体外形测绘;
步骤5通过控制ROV与吊机的运动,将水下检测系统移动到水下结构物的重点区域,实现对重点区域的检测,获得相应的声呐成像图像;
步骤6完毕之后进行水下检测系统的拆除,包括回收ROV、抱缆装置、张紧型锚缆系统以及声呐设备,进行张紧型锚缆系统的张力缆与ROV连接处抱缆装置的拆除以及声呐设备的拆除等.
2 水下检测系统数值分析模型
在AQWA中设置水深为60 m,水下检测系统布置在深度30 m处,张力缆设置为60 m.张力缆布置在机器人的首部,通过ROV抱缆装置上的滚轮以及抱紧环的卡锁进行升降和固定.水下检测系统实际模型结构形式较为复杂,在AQWA的计算分析模型中对水下检测系统进行适当的简化,原则上在保证计算收敛的基础上,最大程度上还原真实模型,水下检测系统数值计算模型见图3a).
水下检测系统水动力模型整体坐标系定义:①X方向为浮体的长度(纵向)方向;②Y方向为浮体的宽度(横向)方向;③Z方向为浮体的高度(垂向)方向;④风、浪、流入射方向与X轴正方向之间的夹角定义为入射角,逆时针方向为正.0°表示X轴正方向与波浪传播方向一致,其坐标选取见图3b).数据记录时,0°表示水下检测系统遭遇迎浪迎流,90°表示水下检测系统遭遇横浪横流,与计算角度相差180°.
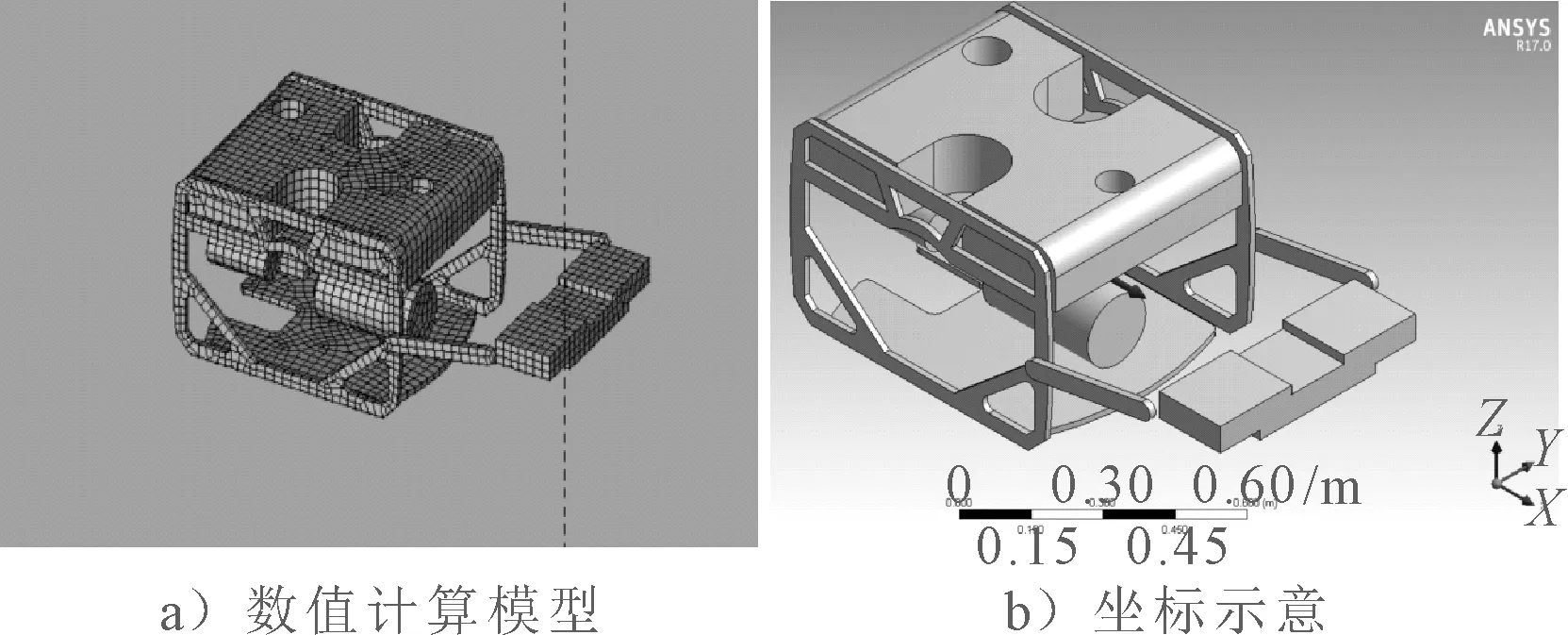
图3 水下检测系统数值计算模型图和坐标示意图
AQWA基于三维势流理论计算波浪场中的浮体受到的波浪荷载,视流体为理想流体,无旋、不可压缩,不考虑流体粘性.AQWA 的分析模块主要包括:AQWA-Line辐射衍射计算、AQWA-Fre不规则波频域计算、AQWA-Librium系泊缆索的初始静动稳定计算、AQWA-Drift慢漂流的随机波浪时域计算、AQWA-Naut规则波和不规则波的非线性时域计算.基于AQWA并针对急流条件下的水下检测系统在波浪和流的联合载荷作用下的张力缆张力和运动响应等问题[8],应用AQWA-Line进行辐射衍射分析,通过AQWA-Naut求解在特定载荷作用下,水下检测系统的张力缆张力和运动响应的时间历程,对水下检测系统的张力缆张力和运动响应进行分析.
AQWA中可通过建立与求解分布源积分方程和运动微分方程,得到流场的总速度势、附加质量和附加阻尼.由于急流条件下的水下检测系统在实际工作过程中完全浸没于水中,因此不受到风荷载的作用,计算过程中只需考虑波浪和流对结构的影响.模型计算过程中仅考虑ROV以及张紧型锚缆系统的运动响应等问题,将流荷载考虑为定常载荷,AQWA中对于定常流载荷的处理方式是用户自己定义各方向的流载荷系数,AQWA根据系数与给定的流速度和方向来计算流载荷.
3 水下检测系统水动力特性分析
3.1 运动响应频域分析
在AQWA计算分析过程中,需要设置模型的重心位置和转动惯量等参数,水下检测系统中ROV的重心及转动惯量等相关参数见表2,其结构的转动惯量是通过ANSYS的static structure分析模块求得.
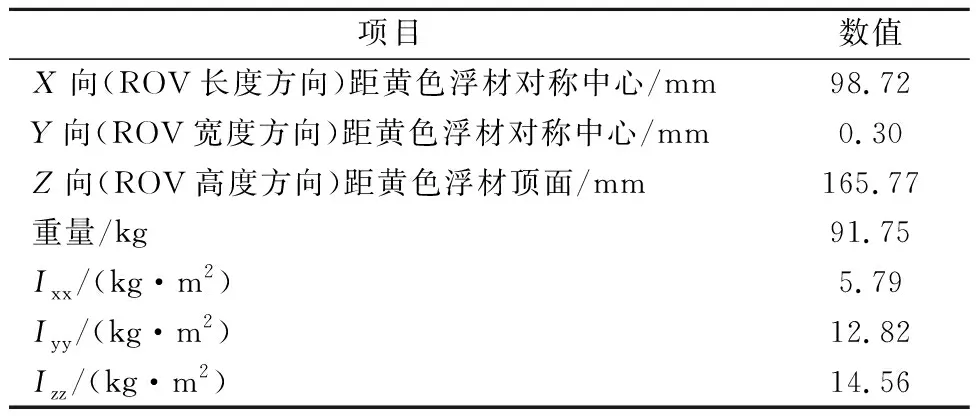
表2 水下检测系统数值计算模型参数
通过频域计算分析,该水下检测系统的附加质量几乎没有发生改变,横摇附加质量约为29.61 kg,纵摇附加质量约为41.08 kg,横摇阻尼与纵摇阻尼很小几乎为零.该水下检测系统在迎浪0°与逆浪180°,斜浪45°与斜浪135°浪向角下,横摇幅值响应算子与纵摇幅值响应算子的值十分接近.图4为横摇和纵摇幅值响应算子,横摇幅值响应算子RAO在波浪角度为横浪90°且频率为0.1 Hz时,数值最大可到达0.85.纵摇幅值响应算子RAO在波浪角度为迎浪0°且频率为0.1 Hz时,数值最大可到达0.74.由频域扫频结果可知,水下检测系统最危险波浪频率为0.1 Hz(0.16 rad/s),因此时域计算时取波浪频率为0.1 Hz(0.16 rad/s),计算最危险波浪频率下水下检测系统的运动响应.水下检测系统检测时所受环境载荷参数见表3.
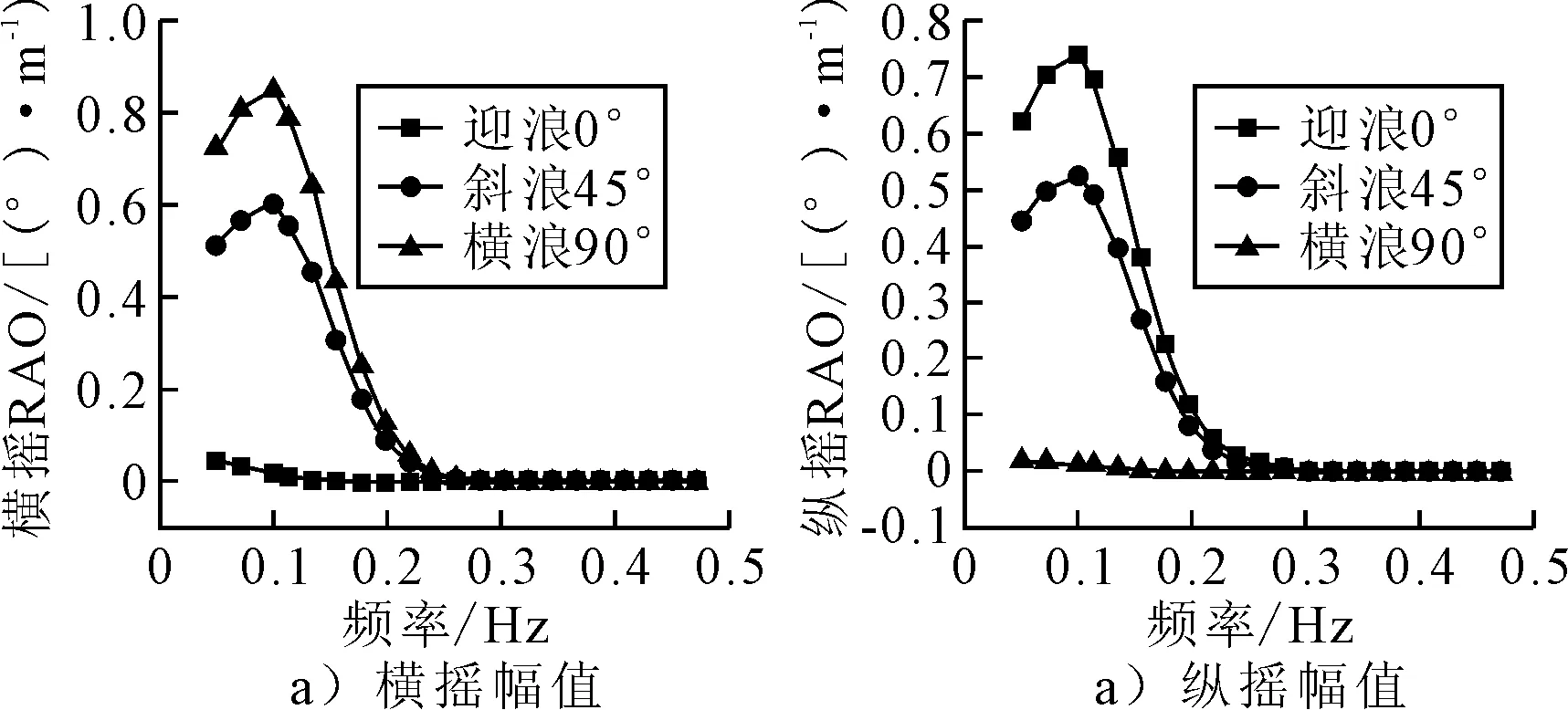
图4 横摇、纵摇幅值响应算子
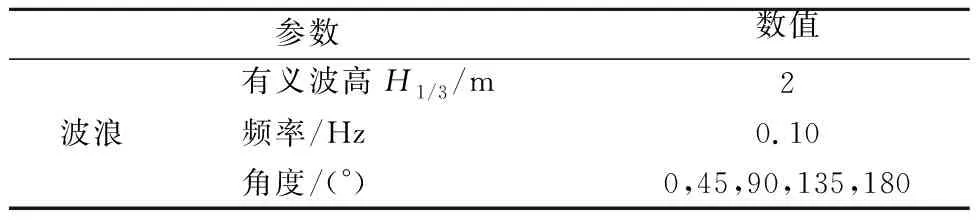
表3 环境载荷参数
3.2 运动响应时域分析
3.2.1流速的影响分析
结合水下检测系统在急流条件下的检测环境,分析在张力缆刚度系数为160 kN/m,迎流0°时,不同流速下的张力缆张力以及水下检测系统运动响应,其计算结果见表4.
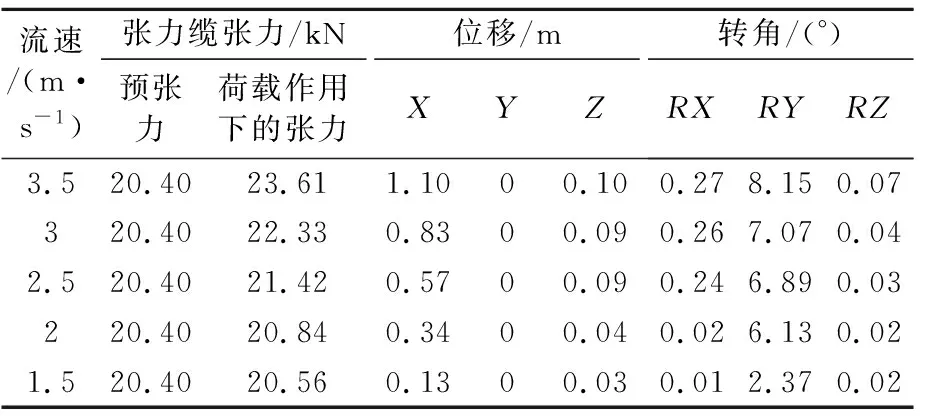
表4 不同流速下的张力缆张力以及水下检测系统运动响应
由表4可知:随着流速的递减,水下检测系统在X(纵向)位移减小,其他运动响应参数也在不断地减小.计算发现,RY(纵摇)角度较大,这是由于迎流0°时,在流荷载的冲击下水下检测系统点头效应(纵摇)比较明显.在3 m/s流速下,RY(纵摇)角度为7.07°,此时水下检测系统可利用自身的浮力与ROV自身的螺旋桨推力使水下检测系统在急流条件下保持较好的稳定性,保证声呐设备在水下进行检测.
3.2.2张力缆刚度系数的影响分析
为保证水下检测系统在张力缆约束作用下水下检测的稳定性,分析讨论张力缆刚度系数对水下检测系统在检测过程中的运动响应的影响.对于抱缆装置而言,抱紧环最大直径为18 mm,合金钢的弹性模量为206 GPa,张力缆最大刚度系数约为1 700 kN/m.选取小一寸直径的钢丝绳,即直径为14 mm的张力缆,张力缆最小刚度系数约为120 kN/m,见表5.计算在3 m/s流速,迎流0°时,不同张力缆刚度系数对张力缆张力以及水下检测系统运动响应的影响.
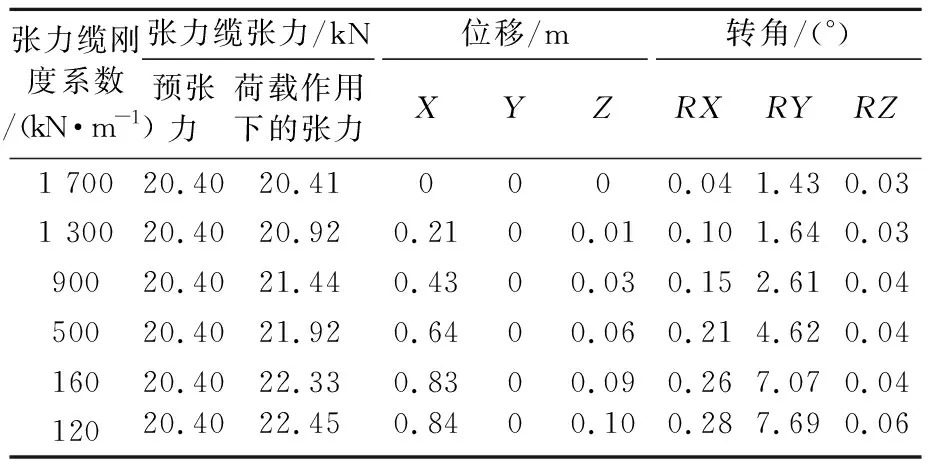
表5 不同张力缆刚度系数对张力缆张力以及水下检测系统运动响应的影响
由表5可知:随着张力缆刚度系数的变化,水下检测系统位移与转角变化呈现出相同的趋势.降低张力缆刚度系数会使得张力缆对水下检测系统的约束作用降低从而导致水下检测系统运动幅值的增加.为保证水下检测系统检测时的稳定性以及检测结果的可靠性,需限制搭载声呐设备的ROV的位移和转角,在检测过程中最好采用张力缆刚度系数较大的张力缆,更有利于声呐设备的稳定探测.在3 m/s流速下,采用刚度系数为160 kN/m的张力缆,可保证声呐设备的正常检测.
3.2.3来流角度的影响分析
为保证水下检测系统能在多角度来流的冲击下稳定地进行水下检测,将主要探讨在3 m/s流速,张力缆刚度系数为160 kN/m时,不同来流角度对张力缆张力以及水下检测系统运动响应的影响,见表6.
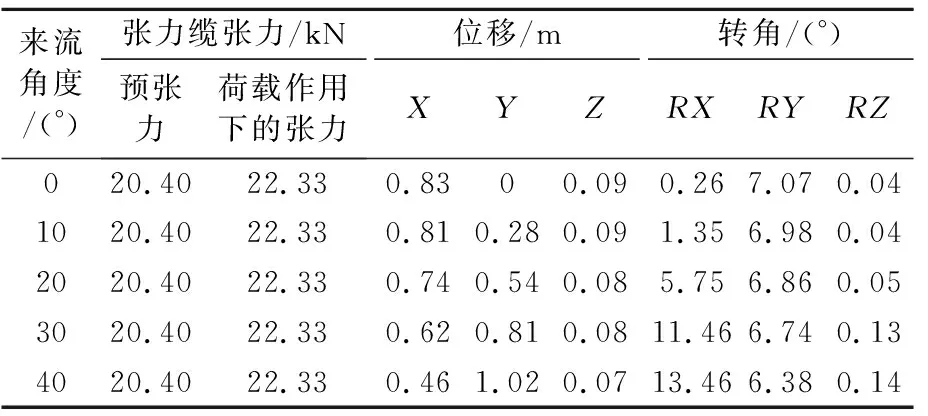
表6 不同来流角度对张力缆张力以及水下检测系统运动响应的影响
由表6可知:在来流角度增大时,Y(横向)受流荷载冲击越来越大从而导致RX(横摇)角度和Y(横向)位移有明显增长的趋势,X(纵向)位移有明显减小的趋势,其他运动响应参数略微减小.来流角度对水下检测系统的运动响应影响较大,需要多考虑来流角度的影响,水下检测系统应该以较好的姿态来减少大角度来流所带来的影响.来流角度较小时RX(横摇)角度较小且Y(横向)位移的偏移较小,检测时来流角度小于20°,可保持水下检测系统的稳定性保证声呐设备的检测.
4 结 论
1) 根据急流条件下水下检测系统水下检测的实际情况,确定了多种检测工况,计算了在不同流速、张力缆刚度系数、来流角度的运动响应水平.根据计算结果可知,在来流角度小于20°的急流条件下,采用锚体为2.5 t纯铁块且张力缆为刚度系数到达160 kN/m的钢丝绳18×19+IWS(钢芯)的张紧型锚缆系统,可满足声呐设备正常检测和水下检测系统的设计要求,使得水下检测系统能够良好地进行检测工作.在实际工程中,应根据实际情况调整好水下检测系统在水下检测时的姿态并采用锚体重量较大与张力缆刚度系数较大的张力缆以增强稳定性,可保证声呐设备正常检测.
2) 文中所采用的基于水动力分析软件AQWA分析水下检测系统运动响应的数值分析方法,能用于评估水下检测系统的合理性和安全性;计算多种检测工况下的水下检测系统运动响应等,为急流条件下的水下检测系统提供技术保障;在方案设计上,提出了张紧型锚缆系统约束ROV,使得水下检测系统在急流条件下的检测具有更好的稳定性,为急流条件下的水下检测系统进一步优化设计提供了可能性.
