一种脐橙采摘机器人视觉快速识别方法的探讨
2022-07-11卢峰胡利军
卢峰,胡利军
(江西环境工程职业学院,341000,江西赣州)
在国家实施乡村振兴战略的背景下,赣南脐橙产业逐步成为赣南果农的主要收入来源。但是,以往的脐橙采摘主要采用较为传统的人工采摘作业方式,需要耗费大量的劳动力资源,工作量巨大。随着我国农业科技的不断发展及农业劳动人口总额的降低,脐橙采摘正在向智能化、自动化的方向发展。现阶段,绝大多数脐橙种植地区仍然主要依靠人工采摘,如何利用脐橙采摘机器人提高采摘效率,解决我国农业劳动力不足正是我们研究的问题。在脐橙采摘机器人完成采摘作业的过程中,需要利用视觉系统对果实进行识别与定位,机器人的果实识别准确度与定位效率决定了视觉系统的性能水平,从而对脐橙采摘效果带来直接影响。
基于此,必须对脐橙采摘机器人的视觉系统进行深入研究与创新,研发一种视觉系统,使得脐橙采摘机器人在采摘过程中可以实时、快速定位空间果实并准确采摘。
1 脐橙采摘机器人视觉系统概述
应用脐橙采摘机器人是脐橙智能采摘的趋势,可以实现对脐橙的实时定位并快速采摘。在实时定位的过程中,识别定位的精准度与效率是最关键的影响因素。因此不断提升视觉系统识别定位的准确度与实时性,可以改进并优化脐橙采摘机器人的工作性能,从而提升采摘效率,有利于进一步推广应用。
脐橙采摘机器人的视觉系统一般由以下几个部分组成:摄像机、计算机、图像处理与距离测量设备。现阶段,大部分脐橙采摘机器人应用一个或两个摄像机,所以应用的识别技术主要为单目视觉技术或双目视觉技术。在采摘前,脐橙采摘机器人会应用视觉系统中的摄像机捕捉果实的实时图像,在获取图像后进行处理与分析,从而分辨并识别出果实部位,最后确定脐橙的精准空间坐标。
本文研究的脐橙采摘机器人采用控制器、摄像头、上位机组成的视觉系统,其中控制器采用美国国家仪器公司(简称NI)的myRIO-1900 作为图像处理设备,NI myRIO 是针对教学和学生创新应用的嵌入式系统开发平台,内嵌Xilinx Zynq 芯片,使用户可以利用双核ARM Cortex-A9 的实时性能及Xilinx FPGA 定制化I/O,学习从简单嵌入式系统开发到具有一定复杂度的系统设计,用户可以实时应用,通过myRIO-1900 自带的内置WiFi 功能模块进行无线操作,也可以通过USB有线传输程序下载。图1 为myRIO 实现WiFi 连接的不同方式:myRIO 可以通过一个外置的无线路由器来实现WiFi 连接,如图1(a)所示;myRIO 自身也可以被配置为一个WiFi 热点,上位机和其他智能终端都可以通过其发射的无线网络连接至myRIO上,如图1(b),这样就不需要再通过第三方的无线路由器来实现连接,在实际应用中会显得更加便捷。

图1 myRIO 实现WiFi 连接的不同方式
系统采用单个摄像头进行图像采集,上位机应用编程处理。由于myRIO 有丰富的板载资源,拥有40 条数字I/O线,支持SPI、PWM 输出、正交编码器输入、UART 和I2C,以及8 个单端模拟输入、2 个差分模拟输入、4 个单端模拟输出和2 个对地参考模拟输出,可方便地通过编程控制与连接各种传感器及外围设备,因此视觉系统组成框图如图2 所示。
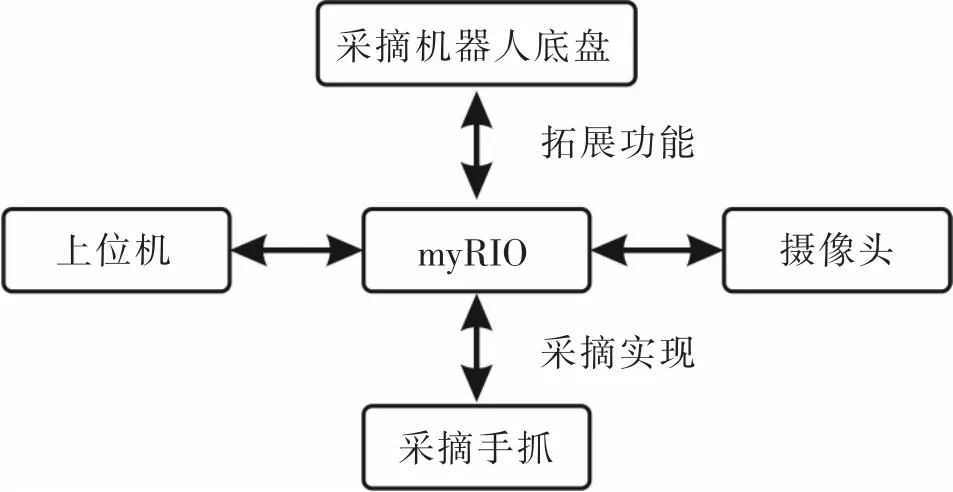
图2 视觉系统组成框图
2 脐橙采摘机器人视觉系统的果实识别
本文研究的脐橙采摘机器人视觉系统采用NI 公司的LabVIEW 软件,它是一种图形化的编程语言开发环境,已经广泛地被工业界、学术界和研究实验室所接受,被视为一个标准的数据采集和仪器控制软件,其采用图形化编辑语言G 编写使用。对于脐橙采摘我们使用LabVIEW 软件中的Vision Development Module 视觉开发模块,其优势在于机器视觉应用的开发可在之前采集的程序基础上,增加机器视觉相关的算法。LabVIEW 提供了丰富的功能算法,例如边缘检测、颗粒分析、模式匹配、文字识别等,方便了对脐橙采摘的视觉识别。图像采集处理过程如下。
(1)脐橙图片采集。通过图像采集系统中的Acquire Images 相机采集脐橙实物图片,分别对不同光照程度下的脐橙进行数据采集。
(2)采集脐橙数据模板。使用Color Classification颜色分类模块,创建颜色分类样本,选取脐橙样本,尽可能选取不同光照条件下有不同阴影的脐橙。采集完颜色模板后,对其进行训练,采集的模板越多,机器人视觉识别越精细,随后保存采集到的颜色模板。
(3)图像存储。将图像存储到缓存中,方便重新利用它们。将当前的图像复制到一个图像缓存中,以便后续的步骤再利用此图像。图像缓存共有10 个可以利用。
(4)抽取彩色平面。从HSL 图像中抽取饱和度平面,将彩色图像转换成灰度图像。由于我们采摘的脐橙图片是彩色的,我们需要得到一幅灰度图像,以便处理函数能接受灰度图像。
(5)二值化处理。对灰度图像进行二值化处理,处理后图像中只有黑白两色,而不是灰度图或彩色图。采用手动二值化,选择Manual Threshold 手动,可以手动调整阈值范围,从而得到所需的目标。
(6)填充缺口。对图像中丢失的模块进行填充,使得脐橙图像更易识别。
(7)脐橙大小检测。选择合理的脐橙图像半径范围,得到满足条件的脐橙圆心坐标和半径,如图3 所示,为方便机器人后续采摘提供条件。
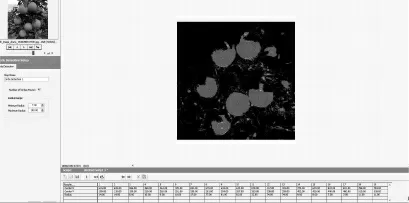
图3 脐橙检测
我们通过以上对脐橙采摘图像的处理,目标是优先选取图像中脐橙直径识别最大的脐橙个体进行采摘,更易实现我们采摘机器人的采摘功能。
3 实验分析
本研究提出的快速视觉系统由摄像机、上位机、NI myRIO-1900 控制器等组成。在应用过程中通过多角度拍摄20 组图像,采用VI 程序文件进行实时识别实验。为了验证系统的识别情况,采用摄像机随机选取20 个直径范围为50~120 mm 的目标脐橙进行识别测试,如图4 所示,记录和测量坐标中心点和脐橙直径。结果脐橙识别成功17次,漏检1 次(未检出水果),误检2 次。除此之外,在特征分析的过程中所采集的脐橙图片样本具有良好的代表性,能达到较好的采集效果;但如果遇见干扰性较强的橙色背景光线,识别效果较差,还需要进行样本优化或进行其他数据处理。
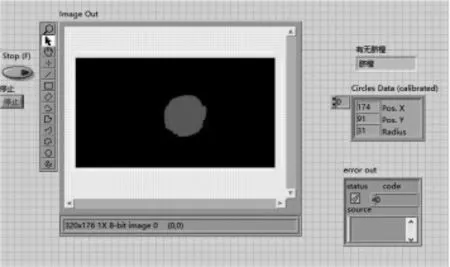
图4 脐橙识别试验
4 结语
本文对脐橙采摘机器人的视觉系统加以探讨,并提出了一种脐橙机器视觉识别的方法,希望可实现采摘机器人的快速视觉识别与精准定位。考虑进一步提升采摘识别效率及减少橙色背景光线的干扰,本方法还有一定的改进提升空间。
