基于Mirauge3D和Context Capture的无人机倾斜摄影空中三角测量优化研究
2022-07-09王审娟
王审娟
(三和数码测绘地理信息技术有限公司,甘肃 天水 741000)
随着农村房地一体项目和美丽乡村建设项目如火如荼地开展,以及倾斜摄影技术的日益完善,传统的生产地籍图和立面图的作业方式也发生了改变[1-2]。倾斜摄影技术已经被广泛应用到大比例尺地形图生产、地籍图生产、立面图生产和4D 产品生产中来,随着实景三维中国项目的推进,倾斜摄影成果的用途越来越广泛。基于垂直摄影的摄影测量软件目前已经很多,且基本上都可以满足生产需要,然而倾斜摄影测量软件目前并不多,且每款软件都有不足,很难利用一款软件解决实际项目生产中的需求。本研究从倾斜摄影空中三角测量解算入手,对目前两款用户较多的软件,利用两组影像数差异较大的实际生产数据进行测试,结果表明,所测试的两款软件在对倾斜摄影数据进行空中三角测量解算时,各有优劣势,通过将两款软件的优势相结合,不但可以提高空中三角测量解算的精度,且提升了解算的成功率,可为从事相关工作的作业人员提供一种新的思路,来提高自身的技术水平,提高工作效率,为数据按时生产提供保障。
1 无人机倾斜摄影技术
1.1 无人机倾斜摄影测量
无人机倾斜摄影是指在无人机的飞行平台上挂载多个航摄仪,完成对地面影像数据的采集。常见的搭载的是5 个相机,其中1 个垂直相机,4 个侧视相机,侧视相机与垂直相机夹角一般为45°,侧视相机焦距为垂直相机焦距的1.4 倍[3-4]。目前由于无人机对荷载质量有要求,加上相机价格昂贵,因此搭载的常为非量测数码相机[5-6]。该相机存在畸变差,因此在使用影像进行数据解算时,都是需要对影像数据进行畸变纠正的[7]。畸变纠正一般有软件外部纠正和软件内部纠正两种,由于不同软件对数据纠正解算原理不一样,因此常用的为软件内部纠正,这样便于软件更好地对数据进行解算。利用建模软件对倾斜摄影数据进行解算,可以得到空中三角测量加密成果和实景三维模型,基于上述产品,又可以生产传统的4D 产品和立面图、地籍图等产品。
1.2 无人机倾斜摄影建模流程
无人机倾斜摄影建模主要包括两部分,即外业数据采集和内业数据加工处理。外业数据采集是指按照一定作业流程,通过航飞的方式获取航摄影像,主要包括航飞前的测区资料收集和调查,空域申请、航线规划、控制点喷涂和测量、外业数据获取。内业数据处理是指利用专业的建模软件,通过自动或半自动的操作方式,将倾斜摄影数据转为实景三维模型的过程。倾斜摄影建模主要流程包括数据预处理,空中三角测量,像控点转刺与平差调整,多视影像密集匹配,密集数字地表模型(Digital Surface Model,DSM)生成,不规则三角网(Triangulated Irvegulav Network,TIN)构建与优化,白膜生成、纹理映射和格式转换输出[8-10],其主要作业流程如图1 所示。
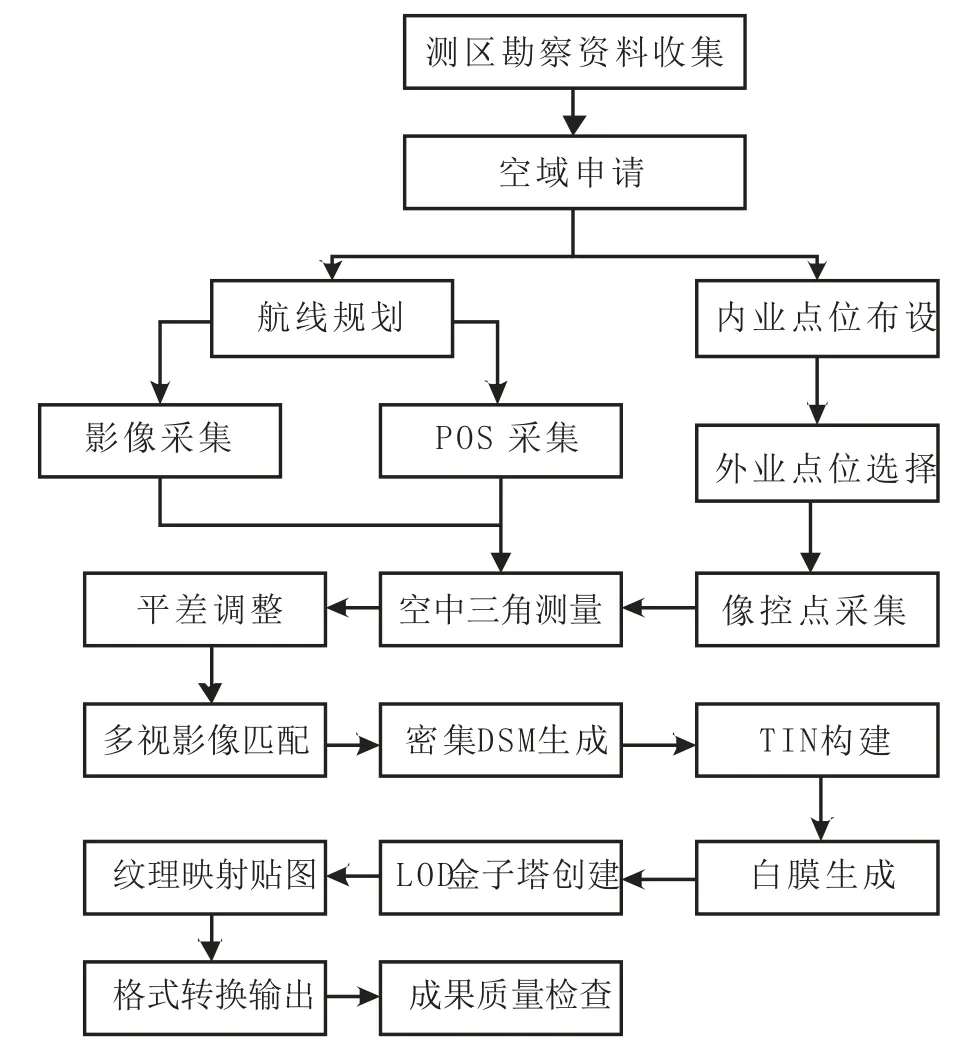
图1 无人机倾斜摄影建模流程示意图
2 空中三角测量原理
航摄影像,具有一定的重叠度,然后基于特征检测、特征提取、图像相似度计算、特征匹配、平差调整等一系列算法,得到基于定位定姿系统(Position and Orientation Systen,POS)坐标系下的虚拟坐标,然后结合外业采集的像控点,将像控点转刺到影像对应的实际位置上,再通过平差调整,将虚拟坐标系下的虚拟坐标转为控制点坐标系下的绝对坐标。通过空中三角加密解算,就可以得到立体像对,通过立体像对,就可以获得影像上任何一点的三维坐标,基于此,才可进行地形图等其他测绘产品的生产。
3 实景三维模型生产原理
空中三角加密成果只是一个定位点,对于后期生产实景三维模型是不够用的。其加密的成果,只是少量稀疏的三维点坐标,这些点坐标,由于密度低,不能准确地反映实地的地形起伏变化。为了解决这一问题,在算法方面,引入了多视影像密集匹配技术。多视影像密集匹配是基于现有的空中三角成果,计算测区每个物方点的三维坐标,并将计算得到的结果保存下来。通常主要分为构建尺度空间、特征点检测及定位和确定特征点方向3 步。得到密集的三维点坐标后,需要通过构建不规则三角网的形式,对离散的三维坐标点进行构网,这样就可以得到TIN 模型,而TIN 模型是目前公认的,最能准确描述地表的真实起伏形态。在构建三角网的时候,应遵循构建的面互不交叉、互不重叠这一原则。
实景三维模型可以真实准确地反映现实状态,而构建的TIN 模型属于白膜,没有贴图,这样给人的感觉不直观、不真实,因此需要对其进行纹理映射。纹理映射目前主流的方法有正向映射和反向映射。纹理映射依据的核心理论是共线方程,即摄影测量基础理论中的物像空间中的物点、纹理影像空间中的像点和投影中心这三点共线。依据共线方程与影像的外方位元素将三角网上的3 个点坐标投影至影像的像方坐标系中,结合建模工作前期计算过程中金字塔解算、点云匹配、空中三角运算等工作,最后计算出3 个投影点的纹理坐标,通过这个三角形在二维影像上形成的区域将所需的纹理投影至三角网上,最后通过处理筛选多幅影像内的纹理进一步选出贴近现实的模型纹理,这样就可以得到带有纹理贴图信息的三维模型,也就是常说的实景三维模型。
4 项目验证
4.1 测区概况
(1)测区1 位于某一农村村落,房屋较密集,测区面积约1 km2,高差约10 m,项目主要是通过倾斜摄影的方式生产地籍图。结合地形和项目需求,选用旋翼机,搭载5 镜头相机,垂直焦距35 mm,侧视焦距均为50 mm,航向、旁向重叠度均设置为85%,航飞90 m,地面采样分辨率为1.3 cm,航飞2 架次,共获得有效影像数13 055 张,5 个相机共用下视镜头POS 数据,按照150 m 距离均匀采集像控点40 个。
(2)测区2 位于某城区某一巷道,巷道两侧树木较少,房屋较规整,长约150 m,项目主要是通过倾斜摄影的方式生产立面图。结合巷道实际情况和项目需求,选用旋翼机,搭载5 镜头相机,航飞80 m,地面采样分辨率为1.2 cm,沿巷道走向对巷道两侧建构筑物进行倾斜摄影,航飞1 架次,共获得有效影像数1 540 张,5 个相机共用下视镜头POS 数据,采集像控点6 个。
4.2 建模软件简介
(1)Mirauge3D(以下简称M3D)软件。该软件是北京中测智绘自主研发的一款实景三维建模软件,可自动对POS 数据坐标进行转换,可自动将二维影像转为实景三维模型,支持海量数据的运算。独特的空中三角测量机制,将海量数据自动划分为多个任务,依次完成每个任务的解算,最后利用单机模式完成区块空三成果的自动融合,在空中三角解算方面,具有非常明显的优势。但是通过对现有版本进行测试,该软件生产的模型,优势不明显,在多数情况下,是难以满足项目需求的,因此该软件并不适合用于模型的生产。
(2)Context Capture(以下简称CC)软件。该软件是Bentley 公司名下的一款自动建模软件,支持多源数据、点云数据的建模,软件解算效率高,生产的模型精细度很高,支持集群提取特征点,单机完成平差调整,输出成果格式多,是目前用户使用最多的一款建模软件。但是该软件劣势也比较明显,就是不适合用于解算影像数较多的空中三角,通过率并不理想。
4.3 基于M3D 软件的空中三角测量解算
对测区1 和测区2 的数据进行预处理。M3D 软件中不允许导入的影像存在重名,因此需要对影像和POS 进行重命名。利用拖把更名器对5 镜头影像进行重命名,确保5 镜头影像无重名;对POS 数据重命名,确保POS 名和影像名一一对应。按照常规操作,新建工程,导入影像和POS 数据,完善相机参数,根据像控点求出测区平均高程,提交空中三角测量任务,打开并设置引擎路径,开始空中三角测量解算。解算完成后,查看成果,测区1 和测区2 解算成果均无明显分层,将像控点全部进行转刺,并提交平差任务。平差完成后,查看平差报告,可得出:测区1 中加密点重投影中误差为0.94 个像素,加密点中误差为0.76 个像素,像控点平面中误差为0.054 m,约为,高程中误差为0.061 m。测区2 中加密点重投影中误差为0.91 个像素,加密点中误差为0.74 个像素,像控点平面中误差为0.049 m,高程中误差为0.057 m。测区1 和测区2 中加密点重投影中误差均小于1 个像素,加密点中误差均小于0.8个像素,空中三角测量成果可用,但是精度较差。
4.4 基于CC 软件的空中三角测量解算
对测区1 和测区2 数据进行预处理。CC 软件中允许影像重名,因此无需对影像进行重命名。新建工程,导入影像和POS 数据,完善相机参数,对影像进行快速检查,影像无损坏,均可使用。按照软件默认参数,提交空中三角测量任务,设置路径并开启引擎,完成对任务的解算。解算完成后,查看成果,测区1 解算成果不可用,出现了明显的分层,5个镜头数据分成了5 个层;测区2 成果无明显分层,转刺像控点并平差,平差结束后查看平差报告,报告中加密点重投影中误差为0.31 个像素,加密点中误差为0.28 个像素,像控点平面中误差为0.011 m,高程中误差为0.015 m。测区2 空三解算成果可用,精度较好。
4.5 基于M3D 和CC 软件的空中三角测量解算
将M3D 软件中2 组测试数据空中三角测量成果导出为可交换格式的xml,在导出时将连接点也一并导出,将导出的成果导入CC 软件中,并在成果的基础上再次提交一次任务,加密点重新进行计算,待解算完,查看空中三角测量报告。具体数值见表1。
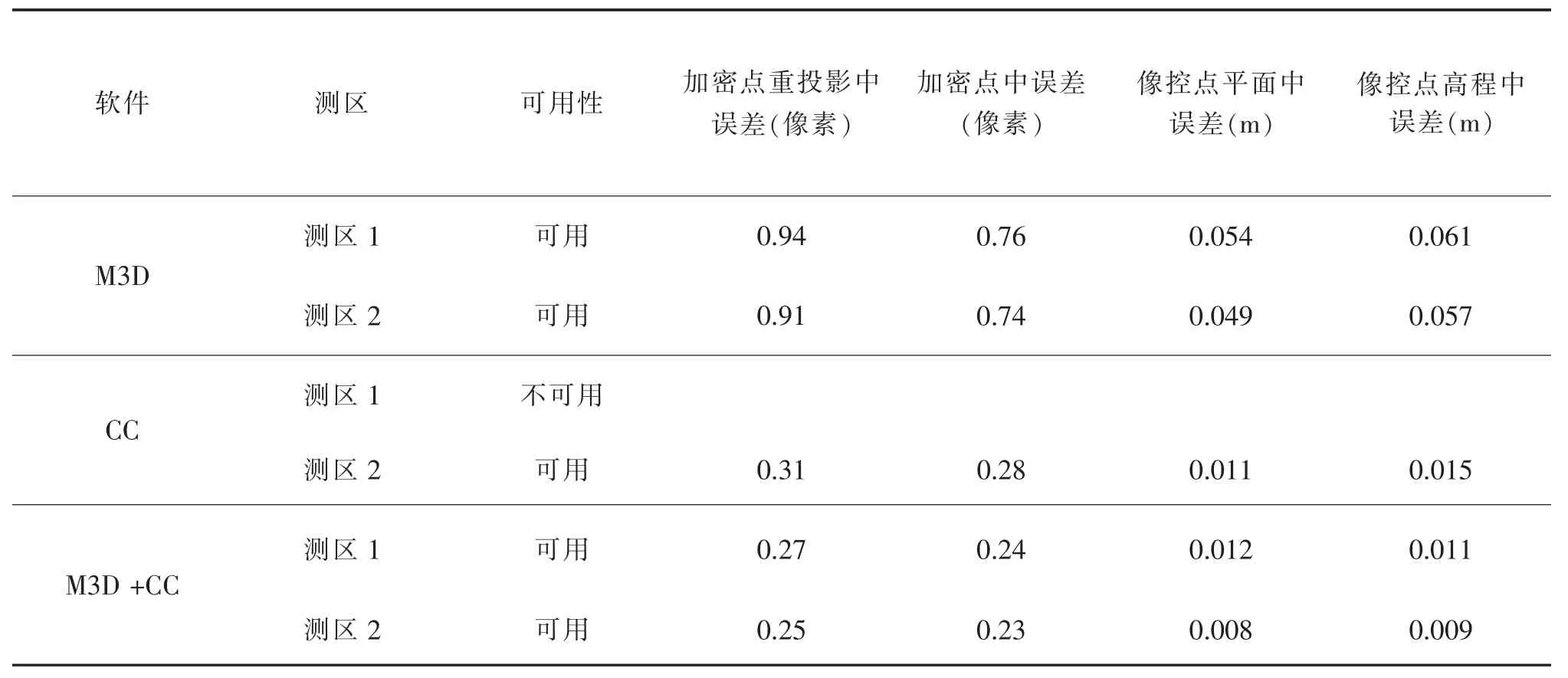
表1 在不同测区各软件成果统计表
通过表1 可以看出,M3D 在空中三角测量解算时,通过率很高,但是精度较差,在精度要求高的前提下,其不具有明显的优势;CC 在空中三角测量解算时,通过率较低,但是精度较高,适合用于高精度空中三角测量,但是由于失败率高,因此在实际作业过程中,可能会浪费很多时间在解算上;将M3D解算的成果导入CC 软件再次解算,不但空中三角测量解算通过率提高了,而且精度也有了明显的提升,对于多数项目而言,该方案可能更适合用于项目的生产。
虽然优点很明显,但是也存在一定的缺点。第一,两款软件搭配使用,对作业员要求比较高,需要作业人员掌握两款软件;第二,两款软件均属于商业软件,同时采购两款软件,对多数单位来说,并不容易实现。
5 结束语
本研究以2 组数据为例,对两款软件在空中三角测量解算环节的精度和通过率进行对比分析,得出两款软件各自的优势,并将二者的优势相结合,再次进行空中三角测量解算验证,实验表明,将二者的优势相结合,不但可以提高空中三角测量环节解算的通过率,而且精度也有了明显的提升。对于要求不高的项目,可以采用M3D 软件直接进行解算;对于影像数少,要求高的项目,可以采用CC 软件作业;对于要求较高,且影像数多的项目,可以采用本研究的方案进行作业。
