一种基于云模型的水肥配比控制策略
2022-07-09唐先红吴云志安徽农业大学安徽合肥230031
唐先红,吴云志 (安徽农业大学,安徽合肥 230031)
水肥一体化技术自出现以来,许多国家,尤其是发达国家在技术开发上投入了巨大的精力。种植环境数据的融合技术国外已应用广泛,实现了农业智能装备控制系统与环境检测系统的高效结合。在国外,以色列、美国、荷兰、日本等国家的水肥一体化技术普遍应用于大棚作物种养和实际农田生产中,均已经取得良好的经济效益。其中,沙漠农业领域水肥一体化技术最发达国家是以色列;荷兰等国家水肥一体化设备比较发达,智能施肥灌溉技术也发展得很成熟,精准配肥智能灌溉技术实现较早;以色列已经建立了全国灌溉系统,并应用于果树等农作物种植中,随着现代农业的发展,加拿大已由传统种地逐渐转为根据农业决策数据种地;文献显示美国的微灌技术推广应用最广泛,此外美国大力发展和应用变量施肥技术,处于世界领先水平,并提出正确的时间、区域、营养元素及用量进行施肥的“4R”计划,以减少环境污染。针对水肥耦合控制的方法研究,国内外的研究热点是模糊控制。李帅帅等设计了模糊PID控制策略实现对肥液电导率的控制,使其维持在一定数值,并应用于大棚施肥自动控制系统;詹攀等分别设计了FPID控制方式和VFPID控制方式,精准控制和提高水肥溶液浓度和酸碱度的配制浓度;Jiang等设计了模糊控制方法对电磁阀占空比进行调制,使得肥液浓度维持在目标范围;Zhang等设计神经网络PID控制,控制泵速以实现单肥路水肥精准配比;Bi等将灰度预测方法运用于模糊PID控制,实现水肥精准控制,并应用于农业示范区。我国水肥一体化技术和设备已大量应用于设施农业基地,但仍存在水肥配比控制精度低以及控制方法对于被控系统动态变化适应性弱等问题。鉴于此,针对水肥配比控制,笔者设计了基于云模型的模糊PID控制方法,实现了根据水肥配比值的动态变化对PID控制参数的实时修正,改善了PID控制对被控系统动态变化适应性较弱的问题。
1 水肥配比控制策略设计
水肥一体化系统在进行水肥配比控制时,灌溉主管路中水流速由于水压等原因实时发生变化需要一种适应水流速变化,及时调节注肥管路中肥液流速的控制方法,实现动态调控注肥管路中肥液流速,维持水肥配比值在误差范围内。且对于常规的PID算法,控制参数经实际测量后,得到具体的数值,不再发生变化,难以满足系统动态控制的需求。而基于云模型的模糊PID控制算法是一种自适应算法,能够根据云模型推理结构及时调节PID控制的参数、、,使水肥配比调节具有精准性,因此采用基于云模型得模糊PID控制方法进行系统中的水肥配比控制。云模型模糊PID控制器结构如图1所示。
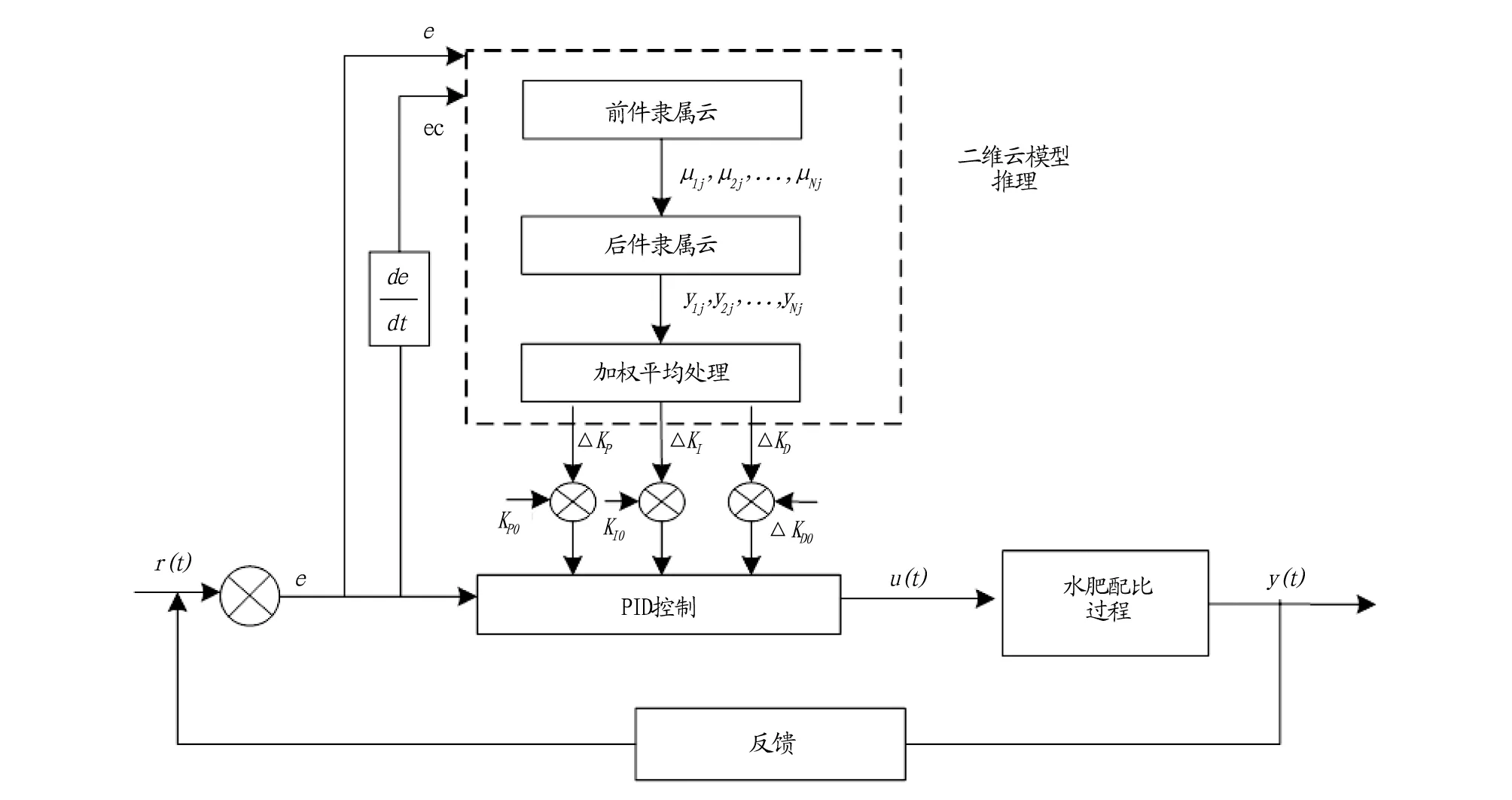
图1 云模型模糊PID控制器结构 Fig.1 The structure of fuzzy PID controller based on cloud model
基于云模型的模糊PID控制器设计总体方法是以水肥配比过程中实际输出()和目标输出()之间的误差及其变化率ec为依据,通过二维云模型推理对PID控制器的控制参数进行调节,使其满足控制系统要求。云模型模糊PID控制器由2部分组成:二维云推理结构和PID控制结构。由云模型推理结构推理得到PID控制修正值,Δ、Δ、Δ,并结合PID控制初始值0、0、0,作为PID控制3个控制参数:、、。最终由系统输出控制量()改变注肥管路中隔膜泵的速率,实现对水肥配比值的调节,使水肥配比达到动态平衡。
二维云模型推理结构由前件隶属云和后件隶属云共同构成。根据输入变量的数字特征确定前件云,通过前件云发生器输出隶属度,其中为前件云的规则条数;根据输出变量的数字特征确定后件云,将作为后件云输入,经后件云发生器生成隶属度为的,其中为后件云的规则条数;对后件生成的1、2,…,,经过加权平均处理,得到Δ、Δ、Δ。再加上PID控制的初始值0、、0,作为系统PID控制的参数,输出控制量实现对水肥配比的控制。
2 隶属云与控制规则设计
在基于云模型的模糊PID控制中,将水肥配比值的偏差和偏差变化率ec作为系统的输入,对和ec划分7个语言子集{NB、NM、NS、ZE、PS、PM、PB},对应的每一个语言子集的数字特征如表1所示。

表1 前件云模型数字特征Table 1 The digital features of the preceding cloud model
根据水肥配比控制过程的输入参数和ec的数字特征,及设置云滴生成数=1 000,通过正向云发生器生成控制系统输入参数的前件云模型如图2所示。
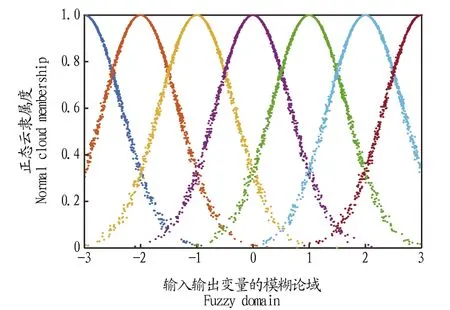
图2 前件隶属云模型Fig.2 The forepart belonging to the cloud model
在基于云模型的模糊PID控制中,将Δ、Δ、Δ作为系统的输出变量,对输出变量划分7个语言子集{NB、NM、NS、ZE、PS、PM、PB},每一个语言子集的数字特征如表2所示。

表2 后件云模型数字特征Table 2 The digital features of the latterpart cloud model
根据系统的3个输出参数的数字特征,及设置云滴数为=1 000,对应后件隶属云模型如图3所示。云模型从左至右分别代表了语言值NB、NM、NS、ZE、PS、PM、PB。

图3 后件隶属云模型Fig.3 The latterpart belonging to the cloud model
根据控制阶段实际需求,对控制规则进行确定。在PID控制系统中,比例项起到加快系统响应速度作用;积分项起到减小系统稳态误差作用;微分项作用是将达到系统控制目标时,防止系统的超调和震荡。根据PID控制中控制参数作用,设计以下调整原则:
(1)e较大时,即系统设定值与实际值差值较大时,需增大加快系统响应速度,减小防止微分过饱和。
(2)当和ec适中时,在保证响应速度和防止系统超调的前提下、、均不宜过大。
(3)当e较小时,适当增大减小系统的稳态误差;适当引入减小系统的震荡。
结合参数调整原则和以往相关领域学者经验,制定基于水肥配比控制的3×49条模糊控制规则,推理规则表如表3所示。每一行3个输出语言变量从左至右分别是输出参数Δ、Δ、Δ论域中的语言变量。

表3 推理规则 Table 3 Inference rule
3 云模型推理流程
云模型推理结构由前件隶属云和后件隶属云以及推理规则构成,隶属度的推理由前件隶属云完成,后件推理输出由后件隶属云完成。
通过输入当前水肥配比值与目标水肥配比值的差值及其变化率ec,经推理得到PID控制的修正值,由PID输出控制量,控制隔膜泵。采用基于云模型的模糊推理算法,根据误差的变化在线修正了PID控制系数,使PID控制适应水肥配比动态变化。具体推理过程如下:
(1)首先,计算出系统的输入变量即偏差和偏差变化率ec。
Input=(,ec)
(1)
(2)由输入变量激活推理规则中前件隶属云,并计算出相应隶属度。
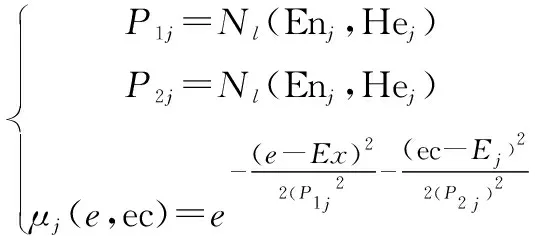
(2)
式中,1为变量的论域上第个云模型生成的正太随机数,2为变量ec的论域上第个云模型生成的正太随机数,为前件云推理输出。
(3)每一个推理规则前件根据推理规则表,映射到推理后件对应的隶属云,得到推理输出。

(3)
式中,为输出变量的论域上的第个云模型生成的正态随机数,为后件推理输出,为PID控制的3个修正值。
(4)对各推理规则的输出经加权平均即得PID控制得修正系数。
根据推理流程,设计了基于云模型的模糊推理算法,具体算法流程图如图4所示。其中,为推理规则条数,为实验中变量论域中的个云模型生成的云滴数目。根据实际需求构建了输入变量与每一个PID控制修正值间的49条控制规则,在进行模糊推理实验时,设置输入输出变量论域中云模型的生成云滴数为500,最终通过对推理结果进行加权平均得到PID控制的修正值。

图4 云模型推理算法流程 Fig.4 Reasoning algorithm flow of cloud model
4 试验与分析
根据二维云模型推理结构的设计流程,以及相应的算法实验,完成云模型推理结构的构建。任意输入5组(,ec)数据,对云模型推理结构进行验证,经二维云模型推理得到PID控制修正值结果如表4所示。
对表4中第5组数据进行分析,当=2.3,ec=1.0时,即隶属于PM和PB的程度较大,ec隶属于PS的程度较大,PID控制修正值Δ、Δ、Δ分别为-1.63、1.52、1.17。对照推理规则表3可知,云模型推理输出与规则设计相符。
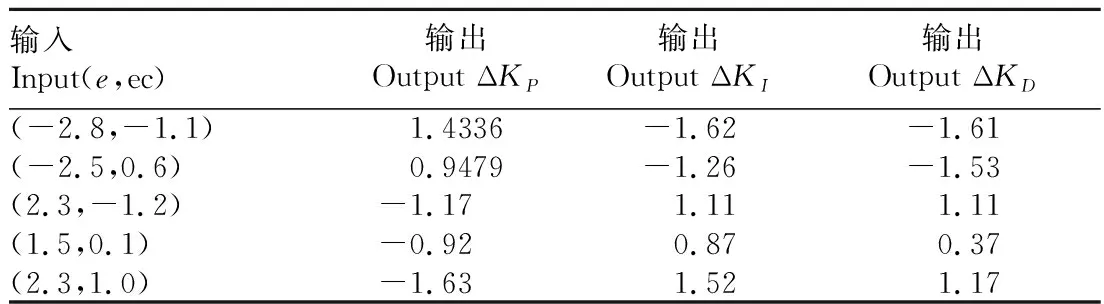
表4 云模型推理结果Table 4 Reasoning results based on cloud model
5 结语
通过构建基于云模型的水肥配比控制策略,实现了根据输入值的动态变化对PID控制参数的在线修正,改善了PID控制对被控系统动态变化适应性较弱的问题。在未来的研究工作中,将继续针对具体的农业生产实际需求,结合水肥的实际流动情况构建相关模型,使控制策略发挥更好的效果。
