无人机倾斜摄影在矿区开采面沉降监测中的应用研究
——以山西省寿阳县新元煤矿为例
2022-07-08秦啟耀
秦啟耀
广西安全工程职业技术学院,广西 南宁 530000
矿产资源开采容易引发矿产上覆岩层的移动变形,从而导致地表沉降及地面建筑损毁。为保障矿区人民生命财产安全,必须对采空区地表进行变形监测,目前一般采用沿开采工作面布设倾向线和走向线监测点的方式进行沉降监测[1]。传统监测多采用GNSS 观测、水准测量、导线测量等方法,需要在测区范围内大量布点,这些方法具有明显的劣势,如作业效率低、人力耗费大、项目成本高、监测点密度较低,容易被破坏[2]。为此,有研究人员采用三维激光扫描技术对开采面进行沉降监测,分析地表沉降变形特征,其监测精度可达毫米级,但三维激光扫描系统多为进口的,成本较为昂贵,难以广泛推广使用。
近年来,无人机倾斜摄影技术取得突破性发展,外业航摄效率、建模速度、建模精度都大大提高,使得低成本快速采集高精度野外数据成为可能。本文以寿阳县新元煤矿为例,分析无人机倾斜摄影测量在矿区开采面变形监测中应用的可行性,并验证成果的可靠性。
1 倾斜摄影技术
传统摄影测量多采用正射角度进行地物信息的采集,从地物顶部以下视摄影方式进行拍摄,能充分反映地表地物的顶部特征信息,但无法对地物侧面的数据进行采集[3]。倾斜摄影测量能够弥补垂直摄影测量的不足,以一定的倾角对地物侧面进行摄影测量。需要注意的是,如果目标物被其他地物遮挡,会造成拍摄影像信息的缺失[4]。因此,在利用无人机进行倾斜摄影测量作业时,应采用多基线、多视角的航摄形式,尽可能从多个角度获取地物信息,最大限度地获取地物完整的影像数据,以满足三维建模的需求。
倾斜摄影测量主要有单相机测量和五相机测量2 种方式。其中五相机倾斜摄影测量系统配备有1个垂直摄影相机和4个倾斜摄影相机,通过将高精度GNSS 接收机和惯性测量单元(IMU)集成处理,对航摄影像的外方位元素进行准确测量,获取地表影像坐标信息。
倾斜摄影测量的核心技术是内业数据的快速自动化处理。外业航摄完成后,作业人员通过专业数据处理软件对航摄影像信息进行处理,主要涉及空中三角测量、密集匹配、粗差检测、点云去噪等关键技术处理,从而生成满足使用要求的高精度点云数据。通过对关键点进行三角网构建,利用内插工具对格网进行栅格数据转换,从而获得DEM 成果。再将不同时期获取的DEM 成果进行对比,即可实现对测区沉降变形的监测。
2 关键技术
2.1 自动空中三角测量
无人机倾斜摄影测量将传统航测系统中的高精度定向技术与计算机视觉三维现实还原技术充分融合[5],使得构建的三维实景模型不仅具有美观性,还具备可量测性,拓宽了应用场景。自动空中三角测量主要有连接点自动匹配、自由网构建、区域网平差3 个步骤(见图1)。
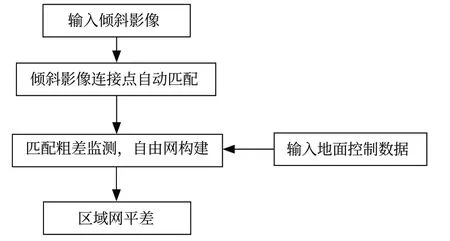
图1 自动空中三角测量流程图
2.2 倾斜影像的密集匹配
倾斜影像密集匹配是以SHIFT 算法为基础,建立数学关系模型,对待匹配特征点间的欧氏距离进行计算,并将其作为匹配测度,对倾斜影像的特征点进行密集匹配。此次研究采用Mean Shift 方法对核线影像进行彩色分割,然后采用半全局匹配方法生成初始视差图[6]。在此基础上,以影像分割的块作为最小单位,采用RANSAC(随机采样一致性)方法拟合视差平面并初步精化,然后再使用置信度传播算法进行视差平面分配,得到视差图后再进行视差精化。笔者考虑到算法的效率和适应性等因素,密集匹配采用影像分块策略,以解决因视差范围过大而造成的内存不足问题,提高了算法的适用性。
2.3 密集点粗差检测与自由网的构建
对倾斜摄影影像密集点粗差进行合理剔除,可以有效提高三维建模的精度。笔者首先以RANSAC 方法为基础,采用5 点法相对定向,建立粗差检测双模型,再进行密集点粗差检测;其次采用空间前方交汇算法,计算密集点残差,将残差值较大的像点剔除[7];最后选择具有较多连接点的3 张影像进行两两间的相对定向。若计算获得的3 个线元素向量为共面向量,3个旋转矩阵依次相乘结果即为单位矩阵,则表明倾斜摄影相对定向结果准确,可靠性较高,从而输出自由网构建结果。
3 实例应用
3.1 外业作业流程
(1)明确航摄范围。笔者依据作业需求,在遥感影像图中粗略获取航摄区域边界,再利用外业测绘方式对边界点进行精准测绘,并将其展绘至地图上,从而明确无人机倾斜摄影作业的范围。
(2)测区航高设计。无人机倾斜摄影相对航高(H)与地面分辨率(GSD)、相机焦距(f)以及像元尺寸(a)之间有一定的数学关系,如式(1)所示。当测区最大高差和航高的比值<0.3 时,可进行免像控点作业。

(3)飞行航线设计。无人机飞行航线需综合考虑测区大小、风速风向、自身续航等因素,航线方向尽量与测区纵长平行。在全面覆盖测区范围的基础上,可以适当减少航线数,降低外业作业时间,提高作业效率。
(4)相机参数设置。在进行航拍作业时,相机需要设置为快门优先模式,并依据光照条件调整快门速度和ISO 值,清除系统缓存,保证有足够的存储空间。
(5)地面像控点布设。地面像控点的布设是无人机倾斜摄影测量的关键性基础工作,布点位置的选择与点位质量对建模成果的精度有重大影响。在测区内实地布设像控点时,应当参照预先设计的航拍航线进行点位布设,并尽可能将像控点布设在相邻航线的重叠区域。像控点布设位置周边不得有明显的遮挡物,确保航拍过程中像控点位清晰可见,且远离高压线、发电厂等强电磁辐射源。像控点布设完成后,应采用GNSS多点平滑观测,保证观测误差≤0.006 m。
寿阳县新元煤矿测区地形以山地、丘陵为主,地势东北较高、西南较低,面积约为2.0 km2。无人机倾斜摄影测量范围如图2 所示,监测范围覆盖矿区开采面地表。此次沉降监测研究为期10 周,使用大疆经纬M600 无人机搭载五镜头进行数据采集,监测频率为一周一次,每次飞行2 个架次,相对航高为120 m,设计5条航线,旁向重叠度为75%,航向重叠度为80%。本文取第一期和最后一期的航拍数据进行分析研究。
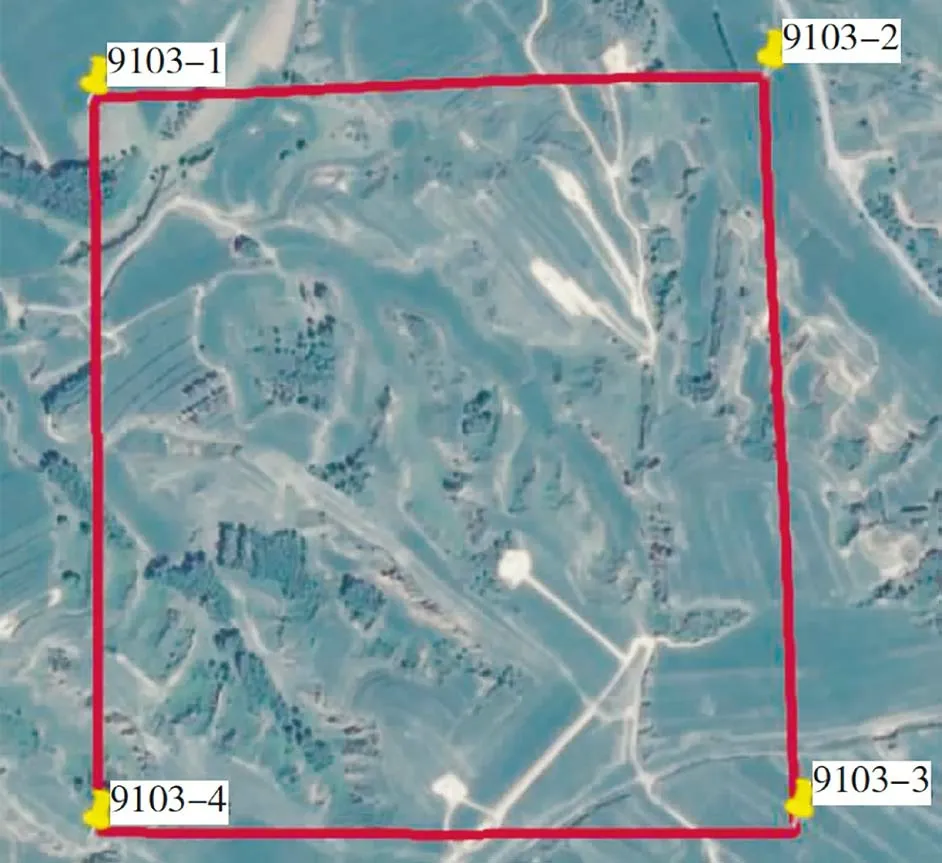
图2 测区范围
3.2 内业数据处理
采用Context Capture 软件进行航拍数据处理。首先,将航片及其对应的POS 数据导入Context Capture 软件,再导入像控点数据;其次,利用GNSS 位置数据以及IMU 姿态数据进行外方位元素的反算,生成点云文件后,再进行空中三角测量加密处理,利用一定数量的已知控制点进行模型外方位元素的解算工作;最后,利用解算出的模型外方位元素以及经过加密处理的点云数据生成DEM 数据。第一期和最后一期的航摄监测DEM 输出结果如图3所示。对比两期DEM 数据差值,即可得到测区开采面地表沉降数据(见图4)。
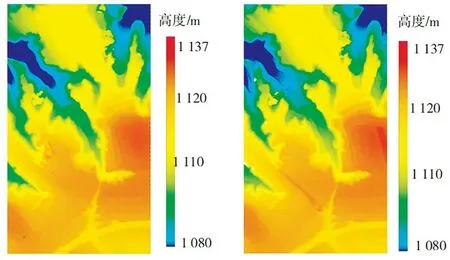
图3 测区第一期(左)和最后一期(右)DEM 渲染图
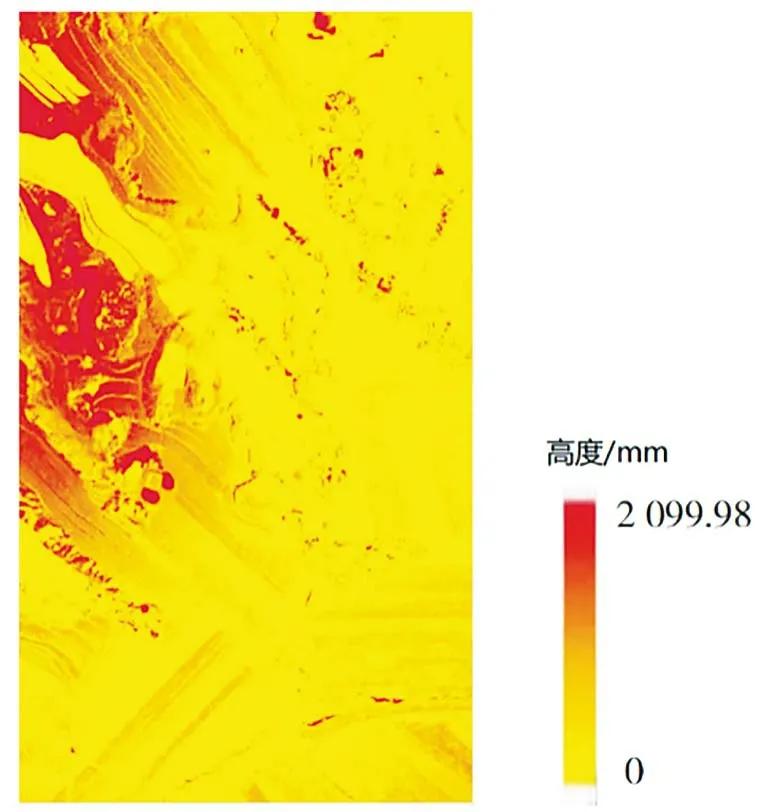
图4 两期DEM 差值成果
3.3 精度分析
目前,矿区开采面地表沉降监测多采用二等水准测量方法,其精度较高,监测数据相对较为可靠,故笔者以传统二等水准观测成果为基准,对倾斜摄影测量成果的可靠性进行分析。笔者以均匀分布的原则在测区范围内随机选择了25 个特征点,采用二等水准测量方法在无人机航摄作业时对各特征点进行高程测量,再在倾斜摄影DEM 成果上提取对应监测点,以对比二等水准观测成果与倾斜摄影测量数据,详见表1。
由表1 可知,无人机倾斜摄影测量数据与二等水准观测值最大偏差为0.0681m,最小偏差为0.0211m,平均偏差为0.0424m,均未超过0.1m 的限差。由此可见,采用无人机倾斜摄影测量技术对矿区开采面地表进行沉降监测,其数据成果具有较高的可靠性。
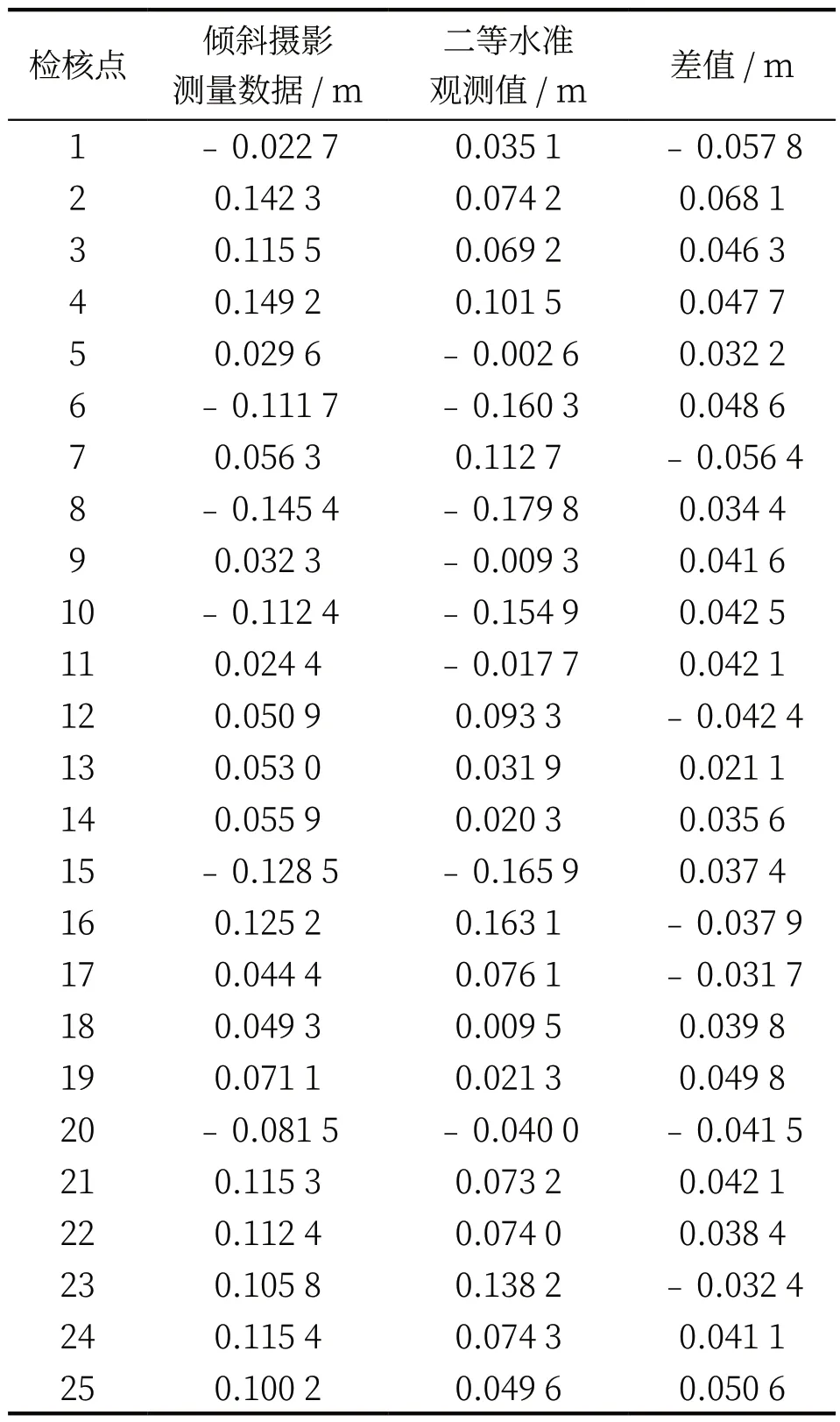
表1 倾斜摄影测量数据和二等水准观测成果统计表
4 结 语
矿区开采面地表沉降监测关乎矿区人民的生命财产安全,传统水准监测方法适用面积小、效率低,且难以实现开采面地表的全覆盖。此次研究采用无人机倾斜摄影测量技术对矿区开采面进行沉降监测作业,经内业数据处理生成矿区地表DEM 渲染图。对比两期DEM 成果差值,即可得到矿区地表全方位的沉降变化可视化成果。通过与二等水准观测成果的对比,验证了无人机倾斜摄影测量技术在矿区开采面沉降监测应用中的可行性和成果可靠性。今后,在矿区开采面沉降监测中可大力推广应用无人机倾斜摄影测量技术。