区域CORS 网数据处理关键技术研究
——以广西崇左市为例
2022-07-08周聪林钟新颖
周聪林,施 波,钟新颖
广西自然资源信息中心,广西 南宁 530029
连续运行参考站系统(Continuous Operation Reference Stations)简称CORS 系统,由多个GNSS 基准站组成。系统计算和播发由卫星轨道、电离层、对流层和大气折射等引起的误差改正信息,从而对系统覆盖区域内的卫星定位用户进行实时精密定位[1]。CORS 系统能够全天候不间断地记录卫星观测数据,为系统覆盖范围内的各等级控制网布设提供已知基准点。CORS 系统的应用改变了传统控制测量方式,外业数据观测无需进行已知点数据采集,即可计算待测点坐标。在计算过程中,合理的解算策略对成果精度影响很大。樊丰新、王健等讲解了不同解算策略下区域网平差精度对比;张留民、刘长星、付宏亮等指出了大规模控制网计算时,起算点位置和个数对于平差成果的精度影响;文鸿雁讨论了广西区C 级GPS 控制网整体平差的问题;黎鹏验证了GAMIT 软件和CosaGPS 软件在高等级控制网平差中的高精度应用。基于以上研究成果,研究小组进一步分析区域CORS 快速组网的数据处理关键技术,以崇左市新建CORS 网为例,研究区域CORS 网数据处理方法,总结CORS 网加密和控制网建设数据处理的技术方案。
1 研究区概况
此次研究区域为广西崇左市。崇左市位于广西西南部,东及东南部接南宁市、钦州市,北邻百色市,西与越南接壤,是广西边境线陆路最长的地级市,总面积17440 km2。崇左市地势大致呈西北及西南略高、向东倾斜状,地处北回归线以南,属亚热带季风气候区。广西卫星导航定位基准站网(简称GXCORS)在崇左地区建设有7 座基准站,站间距50 km 左右[2]。2018年,为了提高GXCORS 在崇左地区的站点密度,实现北斗卫星信号的全覆盖,崇左市在原有基准站的基础上新建9 座基准站点,组建了崇左CORS 系统(简称CZCORS)。同时,CZCORS 统一纳入GXCORS 运行管理,进一步为“数字崇左”建设和崇左市各行各业提供高精度定位服务。
2 技术方案设计
区域CORS 网在并网建设时,一般引入原有的已知基准站点进行整网平差计算,从而获取新建站点坐标。在这个过程中,网形的构建、起算站点的选择、软件及参数的设置、精度配置等技术流程和方案的设计影响着最终成果的精度。相关参数参照《全球定位系统(GPS)测量规范》(GB/T18314-2009)(以下简称国标)进行设定。
2.1 网形构建
CORS 基准站可以24 小时不间断地观测数据,使用时可直接调取存储的相应年积日GNSS 观测数据,无需外业数据采集。在引入A、B 级控制点组网时,需要与待测基准点组建同步环并进行外业联测。引入A、B 级控制点联测除了能反映数据处理的精度,还能通过现场联测来评判外业作业过程的可靠性[3-4]。综上,此项目采用“GXCORS 基准站+A、B 级高等级控制点”作为组网联测方案。
研究小组利用崇左市及周边的7 座GXCORS基准站和测区内各1 个A、B 级控制点,与9座待测基准站组建区域CORS 网(见图1)。
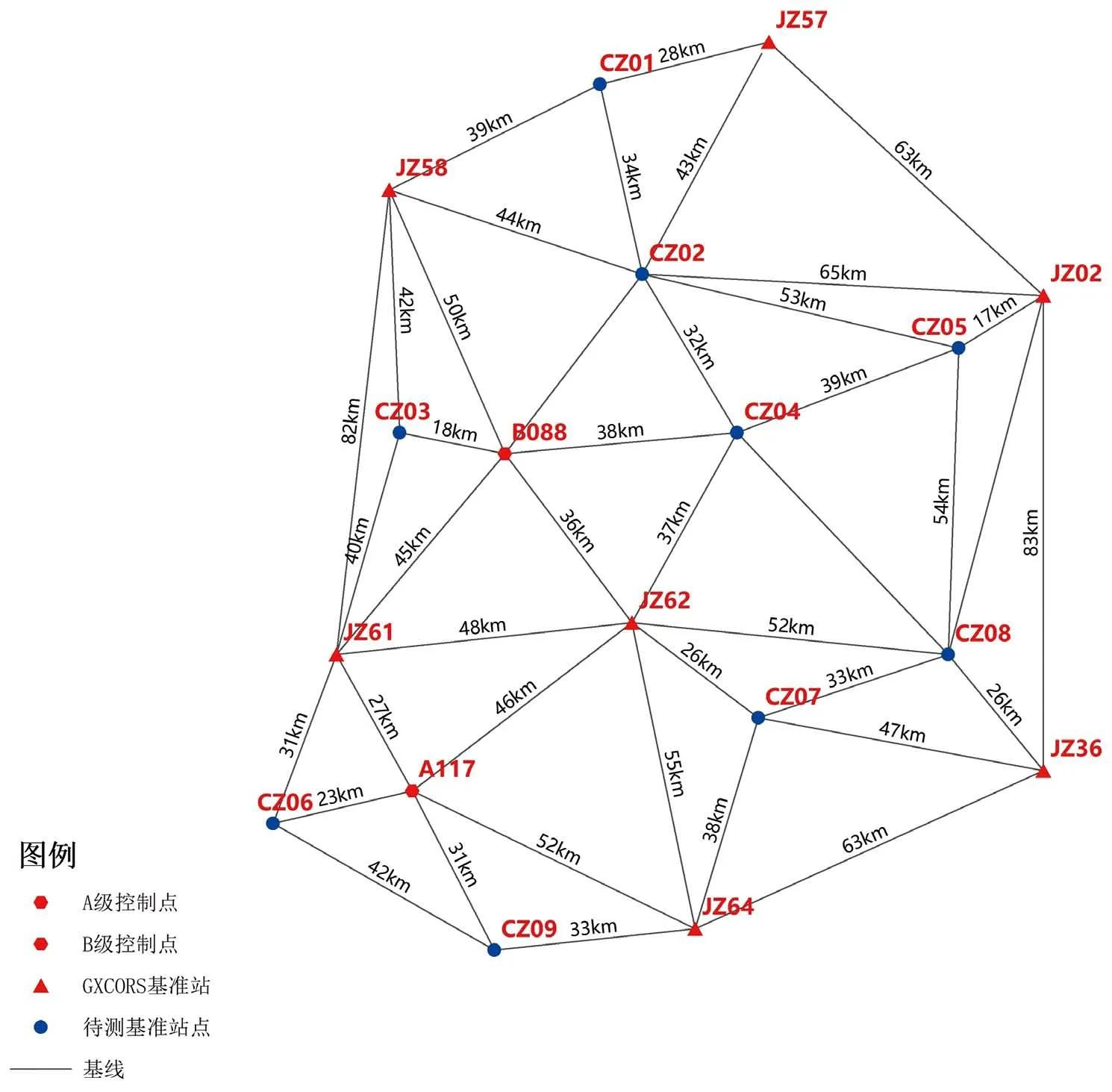
图1 CZCORS 系统建设GNSS 基准站点联测布设图
2.2 GXCORS 基准站选择原则
作为起算点的GXCORS 基准站,应均匀分布并包围整个测区。此项目是对崇左地区CORS 网的局部补充、加密建设。参与组网的A 级控制点点数应均匀分布且不少于4 个,组网中心至少有1 个以上A 级控制点,其中GXCORS 基准站作为A 级控制点参与计算。综上,实际参与计算的有9 个已知点,其中A 级CORS 基准站点7 个,A、B 级控制点各1 个。一般工程测量控制网建设时,需要对参与计算的GXCORS 基准站观测数据进行切割,仅保留与待测点同时段的静态数据参与计算,从而提高最终成果的可靠性。
2.3 软件及参数设置
常用的高等级控制网主要采用科研软件来处理内业数据,如GAMIT、Bernese 等。研究小组主要利用GAMIT 软件进行基线解算,并采用武汉大学的CosaGPS 软件进行平差处理。GAMIT 软件参数设置具体如表1 所示[5]。

表1 GAMIT 软件基线处理参数设置表
2.4 精度要求
此项目内业数据处理和成果精度评价参照国标规范执行。GXCORS 基准站是A 级网,项目计算得到的是B 级网成果,因此主要参照规范中B 级网的精度要求进行数据处理。其中平差后基线精度不应低于1×10-7,闭合环边数不应大于6。
2.5 技术流程
(1)方案设计。组网方案和数据处理方案从已知点和网形组建、软件和参数选择、解算精度要求3 方面来确定。(2)数据处理。分为基线处理和约束平差两部分。(3)精度分析。从基线解算精度、同步环异步环闭合差精度和点位精度3 个角度来进行综合分析,全部合格才可以认为解算成功。基于GXCORS 基准站的GNSS 数据处理技术路线设计如图2 所示。
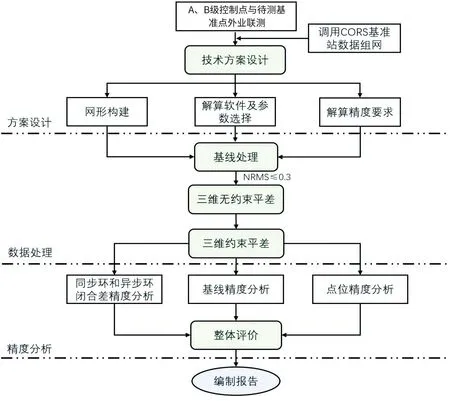
图2 基于GXCORS 基准站的GNSS 数据处理技术路线图
3 GNSS 数据处理精度分析
研究小组开展9 个待测基准站点和2 个A、B 级控制点GNSS 观测,分别选取GXCORS 基准站JZ02、JZ36、JZ57 等7 个基准站的6 天同步观测数据组成B 级控制网,同步观测时间符合国标B 级规范。
根据表1 的参数设置,配置精密星历进行解算,导出卫星观测文件(O文件),在O 文件中第二次基线处理结果的前一行插入“COSAGPSFOR GAMIT O-FILE”指令,导入CosaGPS 软件进行三维无约束平差、三维约束平差计算。
3.1 基线精度分析
3.1.1 NRMS 评价
单日解的标准化均方根(NRMS)是评价GAMIT 软件基线解算精度的重要指标之一。一般认为NRMS 值≤0.3 为解算成功,NRMS值>0.5 说明解算过程中有部分周跳未被探测修复,需要检查原因并重新解算[5]。研究小组统计O 文件中的NRMS 数值(如图3 所示)。由图3 可知,各年积日的NRMS 数值均不大于0.2,这说明基线解算中同步环闭合差分配较好,解算生成的O 文件可以进入下一步数据处理。
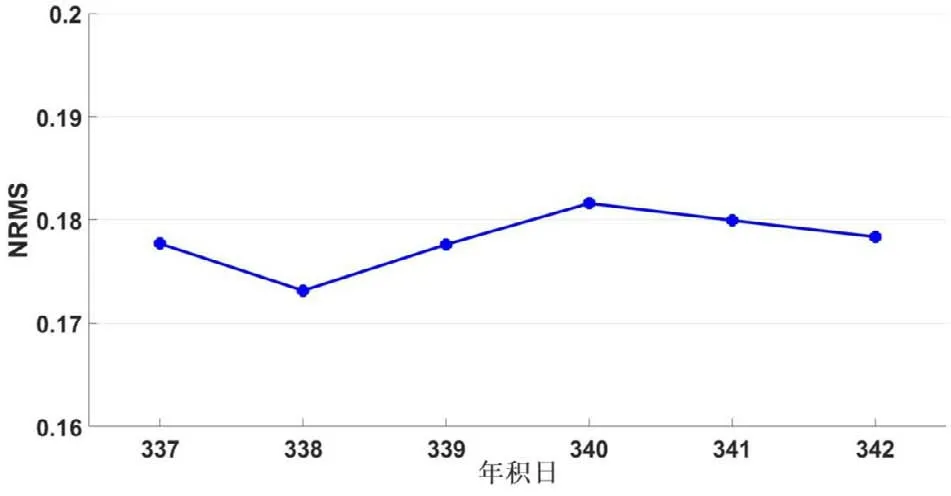
图3 基线解算NRMS 值图
3.1.2 同步环和异步环统计
研究小组利用CosaGPS 软件统计同步环和异步环,得到598 个同步环和132 个异步环。以长度闭合差为最优闭合差选择依据,列出最优和最弱环(见表2)。
根据表2 可知,同步环中最弱环JZ62-CZ09-CZ03 的各分量闭合差分别为7.1 mm、-7.8 mm、-1.1 mm,均小于软件根据国标计算出的坐标闭合差限差23.2 mm;长度闭合差为10.6 mm,远低于长度闭合差限差40.1 mm;同步环中最优环JZ57-CZ01-CZ02的各分量闭合差和长度闭合差均为0.1 mm,分别小于限差12.7 mm 和22.0 mm;平均长度闭合差是3.8 mm。以上数据说明处理后的同步环具有较高精度,符合国标精度要求。
CosaGPS 软件中异步环报表内容分为预处理和精处理两部分。在相同闭合环的两部分处理结果中,各分量闭合差和长度闭合差相同,仅各指标的限差不同,精处理报表中的限差值远低于预处理报表,因此研究小组以精处理报表结果为异步环分析依据。分析表2 可知,最弱环中的各分量闭合差和长度闭合差分别为-3.5 mm、-9.7 mm、-21.6 mm和23.9 mm,分别小于对应的坐标闭合差限差23.7 mm 和长度闭合差限差27.0 mm;最优环中的各分量闭合差和长度闭合差分别为-0.1 mm、-0.3 mm、0.6 mm 和0.7 mm,分别小于对应的坐标闭合差限差9.0 mm 和长度闭合差限差19.8 mm;平均长度闭合差为6.03 mm。由以上数据可以认为此次计算过程中的异步环具有较高精度,符合国标精度要求。
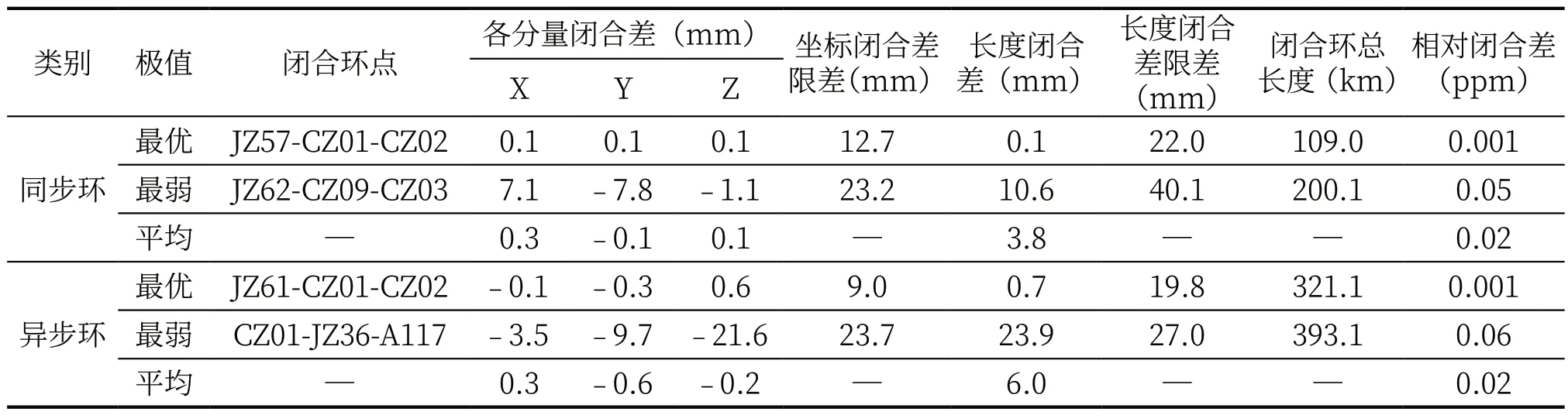
表2 同步环和异步环闭合差统计表
3.1.3 重复基线
CosaGPS 软件中输出的重复基线报表内容分为长度差值比较和精处理两部分。研究小组以精处理输出报表为分析依据,对146 组539条重复基线进行统计,结果如表3 所示。
三维无约束平差基线分量改正数统计表如表4 所示。根据表3、表4 可知,146 组重复基线中最弱基线是CZ01-CZ09,该基线在X、Y、Z 方向上的长度差值均符合限差要求;最优基线是JZ57-JZ58,该基线各方向差值和长度差值均符合限差要求;整体来看,各方向上平均差值均小于±2 mm,平均长度差值5.7 mm,系统评价合格。

表3 重复基线统计表
3.2 网平差处理
网平差主要进行三维无约束平差和三维约束平差计算。三维无约束平差用任一GXCORS基准站点作为起算点平差,进行粗差分析,探测剔除观测向量中的粗差,并对整网内部精度进行检验和评估。
3.2.1 三维无约束平差
三维无约束平差后导出基线向量残差报表,统计基线各分量改正数如表4 所示。
根据表4,最弱边CZ01-JZ64的各方向分量改正数分别为-1.2 mm、9.6 mm、14.3 mm,均小于CosaGPS 软件输出限差44.5 mm;最优边JZ62-CZ04 的各方向分量改正数分别为0.2 mm、-0.6 mm、0.3 mm,均小于限差11.3 mm,无论是最优边还是最弱边,基线各分量改正数均小于对应限差,符合国标精度要求。

表4 三维无约束平差基线分量改正数统计表
3.2.2 三维约束平差
无约束合格后应合理选择3 个以上基准站点作为起算点进行三维约束平差,研究小组选择了5 个均匀分布的基准站点进行三维约束平差。统计基线各分量改正数如表5 所示。
根据表5,最优边CZ02-CZ05 的各方向分量改正数分别为0.4 mm、-0.4 mm、-0.1 mm,小于CosaGPS 软件输出限差15.8 mm;最弱边JZ36-JZ62 的各方向分量改正数分别为20.8 mm、-13.4 mm、-11.2 mm,小于限差21.9 mm。

表5 三维约束平差基线分量改正数统计表
根据国标要求,约束平差后基线向量的改正数与无约束平差结果的同名基线相应改正数的较差(dvΔx,dvΔy,dvΔz)应当小于2σ,统计较差结果如表6 所示。由表6 可知,最优边的各方向基线分量改正数较差均为0.1 mm,小于限差24.8 mm,最弱边的各方向基线分量改正数较差分别为-16.0 mm、9.0 mm、10.9 mm,均小于限差73.5 mm,符合国标规范要求。

表6 三维约束平差基线分量改正数较差统计表
3.2.3 约束平差后基线边长和点位精度分析
三维约束平差后,导出CosaGPS 软件约束后边长和参与计算的点位精度等相关成果报表,分析统计边长中误差和基线相对中误差极值(见表7)。

表7 三维约束后边长精度统计表
此次三维约束平差结果中,边长相对中误差最大的是基线A117-CZ06,长度22.8 km,平差后相对精度为1 ∶3300 万,优于国标要求的1 ∶107,最优基线CZ09-JZ57 的边长相对中误差为1 ∶44502 万,达到了1 ∶109,满足B 级控制网的要求。
三维约束平差有18 个基准点参与计算,其中起算点有5 个,计算得到13 个基准点坐标,其中有9 个待测点,4 个检核点。统计平差后的各点位中误差如图4 所示。
图4 中,约束平差后得到的13 个点的点位误差均在2.5 mm 以内,绝大部分点位X、Y和Z 方向的中误差<2 mm,最优点CZ04 各方向点位中误差<1.5 mm,最弱点是A117,Y 方向中误差是2.1 mm。
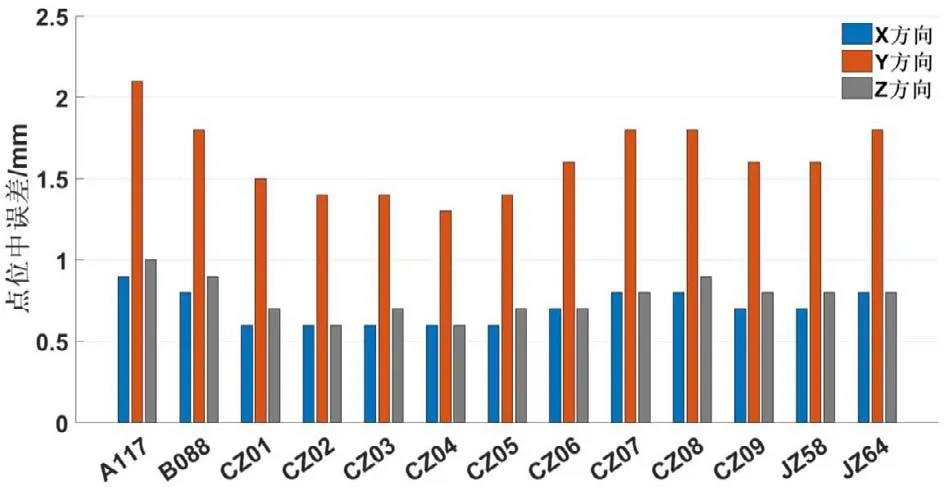
图4 点位中误差统计图
3 个方向的平均点位中误差分别是0.7 mm、1.6 mm 和0.8 mm,综合来看,此次约束平差的X 和Z 方向的点位中误差<1 mm,Y方向点位中误差<2 mm,精度较弱,整体成果精度良好。
3.3 整体精度评价
为了评价项目解算成果精度,研究小组用GXCORS 基准站和高等级已知控制点检验三维约束平差计算成果。
参与检验的有2 个CORS 基准点、1 个A 级控制点和1 个B 级控制点。4 个平差检验点的平面坐标误差<±5 mm,高程坐标误差<±10 mm;平面X 方向和Y 方向坐标误差绝对值的平均值分别是2.75 mm 和1.93 mm,高程H 方向坐标误差绝对值的平均值是4.6 mm。综合来看,此次平差成果整体具有很高的计算精度,符合国标B 级控制网规范要求。
4 技术要点
(1)组网和起算点的选择。市级区域CORS 网一般为B 级网,为了保证平差精度,研究小组在已知点选择上遵循均匀分布的原则,将已知点和待测点穿插分布进行组网,网图的4 个方向和网中心至少布设1 个以上已知点;约束平差时,从网图4 个方向和网中心各取一点作为起算点进行平差计算。
(2)软件选择。区域CORS 网对平差软件的要求较高,研究小组选择的CosaGPS 软件具有解算容量大、运算速度快,兼容多种基线处理软件数据格式和多种规范要求的特点[6],比较适合区域CORS 网的快速处理。
(3)参数设置。一般认为,距离海岸线1000km 以内的高等级控制网进行数据处理时,需要将潮汐改正考虑在内。广西距离海岸线最远的距离约为570 km,因此在广西区内进行区域CORS 网建设时,需要进行潮汐改正。
5 结 语
研究小组以CZCORS 系统建设为案例,对区域CORS 网数据处理技术方案进行了研究。
(1)研究小组采用的“GXCORS 基准站+A、B 级高等级控制点”作为已知基准点与9 座待测基准点组网联测的方案,能够全面、客观地反映区域CORS 网数据外业采集至内业处理的全过程成果精度。
(2)研究小组采用的GAMIT+CosaGPS组合软件数据处理模式,能够较好地完成高精度区域CORS 网坐标解算任务,基线解算的NRMS 值<0.2,基线解算结果较为理想;约束平差后基线边长相对中误差可达到10-7;检验点平面坐标比对结果<±5 mm,高程比较<±10 mm;无约束平差基线分量改正数、约束平差与无约束平差基线分量改正数较差等各项指标均满足国标规范要求,成果达到B 级网精度。