GEDI L2A不同算法对地面高程和森林冠层高度精度的影响分析*
2022-07-06刘丽娟王成聂胜朱笑笑习晓环王金亮
刘丽娟,王成,†,聂胜,朱笑笑,习晓环,王金亮
(1 云南师范大学地理学部 云南省高校资源与环境遥感重点实验室 云南省地理空间信息技术工程技术研究中心, 昆明 650500; 2 中国科学院空天信息创新研究院 中国科学院数字地球重点实验室, 北京 100094)
准确获取全球尺度的地面高程及森林冠层高度对了解陆地生态系统十分重要,星载激光雷达脉冲能穿透森林冠层到达地面,为大区域地面高程估算和森林垂直结构反演提供可靠的数据源支持[1-2]。全球生态系统动力学调查(global ecosystem dynamics investigation,GEDI)雷达是美国航天局2018年12月5日搭载于国际空间站(International Space Station,ISS)的星载激光雷达系统,该系统搭载了全球首台多波束线性体制的激光测高仪,主要用于对热带和温带地区森林垂直结构的精准测量[2-4]。GEDI系统包括3个激光器,其中1个激光器被分为2个波束(覆盖波束),另外2个激光器保持全功率(全功率波束),覆盖波束与全功率波束分别能够穿透95%和98%的森林冠层到达地面[5]。GEDI通过3个激光器发射频率为242 Hz的4束光束,并通过光束抖动在地球表面产生8条光斑轨迹,每条轨迹由沿轨距离为60 m、光斑直径为25 m的圆形足迹组成,相邻轨迹间距离约600 m,扫描幅宽约4.2 km[6]。GEDI系统自2019年4月开始正式在南北纬51.6°之间获取数据,涵盖地球上热带及温带森林,预计在其两年寿命期间提供超过100亿个高质量波形数据,为了解地表植被结构及获取地上生物量提供大量有效数据[7-9]。
由于受到卫星位置、姿态以及大气等内外因素的影响,GEDI L2A数据对于地面高程和森林冠层高度估算的精度有待提高[10],GEDI系统通过设置不同参数得到6种算法的地面高程和森林冠层高度,为提高不同环境下GEDI L2A的测量精度提供了选择[11]。Adam等[10]以机载LiDAR为参考数据比较了GEDI L2A不同算法得到的结果,发现默认算法并不是估算地面高程和森林冠层高度的最优算法,由于不同样地所处环境不同,得到的最优算法也有所差异。Potapov等[12]为得到更准确的森林冠层高度,采用去除6种算法中最大最小值再求平均的方式得到最终森林冠层高度,进而与机载LiDAR数据进行比较,表明不同环境采用不同算法会对GEDI的测量精度产生影响。
虽然上述文章提及不同算法的选择会影响GEDI L2A对地面高程和森林冠层高度估算的精度,但均是对于第1版GEDI L2A数据的研究,第2版数据相对于第1版数据在定位精度以及算法的选择上都有所改进,但还未有文章对第2版GEDI L2A各算法的适用性进行研究。考虑到植被覆盖度会影响GEDI获取的森林垂直结构及地面高程信息,不同算法通过设置不同参数可以控制GEDI的波形特征得到不同的结果,因此为得到较为准确的地面高程和森林冠层高度,本文以机载LiDAR提取的数字地形模型(digital terrain model, DTM)和冠层高度模型(canopy height model,CHM)为参考数据,比较不同植被覆盖下不同算法的精度差异,并根据不同覆盖度选择最优算法,以此提高GEDI L2A估算地面高程和森林冠层高度的精度,同时比较本文选择的最优算法与GEDI L2A默认最优算法对地面高程和森林冠层高度的估算精度。
1 研究方法
首先根据GEDI L2A自带参数进行有效光斑的筛选,并计算每个GEDI光斑对应机载激光雷达数据(airborne laser scanning, ALS)的DTM与CHM,并利用机载CHM计算植被覆盖度,分析GEDI L2A提供的6种算法在不同覆盖度下得到的结果与机载DTM、CHM的精度差异,选出不同覆盖度下的最优算法,同时将本文选出的最优算法与GEDI L2A默认最优算法在不同覆盖度、不同坡度下进行比较,最后定量评估算法的选择对GEDI L2A提取地面高程和森林冠层高度精度的影响,图1为整个过程的研究流程。
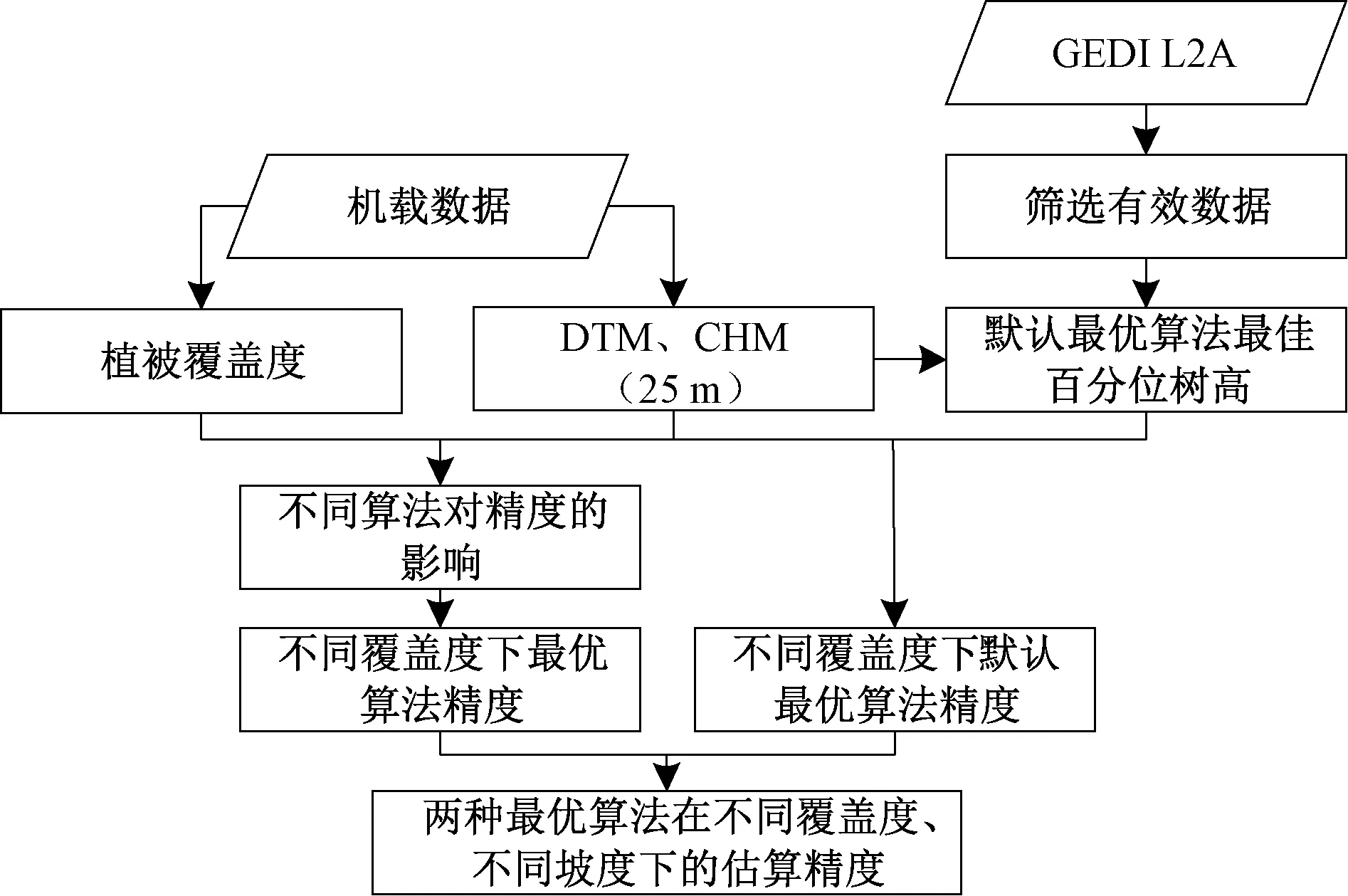
图1 研究流程图
1.1 GEDI L2A参数提取与数据筛选
为获取研究区范围内的高质量GEDI光斑,通过GEDI L2A数据本身所带的一些参数过滤部分无效的GEDI光斑[13-14]。
1)lon_lowestmode_a
2)quality_flag_a
3)elev_lowestmode_a
4)degrade_flag=0,若该值为“1”,表示指示指向和/或定位信息的状态下降,因此删除degrade_flag=1的光斑,保留degrade_flag=0的光斑;
5)sensitivity ≥0.9,大于等于0.9的灵敏度阈值表示光斑质量较好,因此删除灵敏度小于0.9的光斑;
6)rx_assess_flag=0,若该值为“1”,表示在波形中可能出现的各种错误,因此删除rx_assess_flag=1的光斑,保留rx_assess_flag=0的光斑;
7)rx_algrunflag=1,表示检测到有效信号且算法运行成功,因此删除rx_algrunflag=0的光斑,保留rx_assess_flag=1的光斑;
8)读取GEDI光斑6种算法对应参数的值,再经过以上规则过滤每种算法的无效波形,最后通过GEDI L2A中shot_number参数,找出6种算法中的共同有效光斑作为最后的有效GEDI数据。
1.2 不同算法对GEDI L2A地面高程和森林冠层高度的精度影响
植被覆盖度影响GEDI L2A数据获取的地面高程信息与森林垂直结构信息,不同算法通过设置不同参数得到的地面高程与森林冠层高度有所差异,比较不同植被覆盖度下不同算法得到的地面高程和森林冠层高度精度,得出GEDI L2A在不同植被覆盖度下的最优算法。由于第2版GEDI L2A提供默认最优算法,对比分析GEDI L2A默认最优算法与本文根据植被覆盖度选择的最优算法对GEDI 地面高程和森林冠层高度的测量精度。
1.3 精度评价
以机载DTM和CHM的值为参考数据,验证GEDI L2A估算的地面高程和森林冠层高度的估算精度,以二者之间的决定系数(coefficient of determination,R2)和均方根误差(root mean square error, RMSE)作为评价指标,分别对GEDI L2A各算法在不同覆盖度下地面高程和森林冠层高度的估算精度进行评价,同时将默认最优算法的结果与本文选择的最优算法结果在不同覆盖度、不同坡度下进行比较,评价两种最优算法的精度差异。
2 实验结果与分析
2.1 实验数据
2.1.1 研究区
为研究不同算法对GEDI L2A地面高程及森林冠层高度的影响,选用美国5个不同方位的森林地区作为研究区域,分别位于美国东南方向阿拉巴马州的塔拉迪加国家森林内(TALL)、美国西南方向加利福利亚州境内(TEAK)、美国东北方向马萨诸塞州中部的哈佛森林内(HARV)、美国西北方向华盛顿州境内(WREF)、美国西部科罗拉多州境内(NIWO),5个研究区位置分布如图2所示。选择这些研究区有以下原因:首先,能获取高分辨率的DTM和CHM作参考数据。其次,森林覆盖面积较大,便于研究森林冠层高度的精度。最后,5个研究区位于美国不同方位,增加了研究区的多样性,并避免了采集环境的一致性,得出的结果更为可靠。
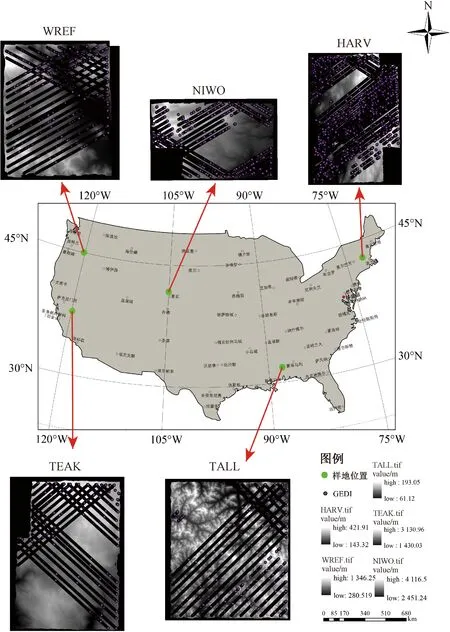
该图基于国家自然资源部标准地图服务网站下载的审图号为GS(2020)4397号的标准地图制作,底图无修改
2.1.2 研究数据
1) GEDI数据
GEDI包括多种数据产品,分为L1、L2、L3、L4共4级。L1级产品为GEDI系统采集的经过地理定位的GEDI波形数据;L2级产品为通过对波形进行处理得到光斑尺度冠层高度参数与垂直剖面度量;L3级产品为网格化的冠层高度、覆盖度和叶面积指数等;L4级产品是光斑尺度和网格化的地上碳储量[2]。
本文使用的是2021年4月更新的GEDI L2A第2版数据,可从美国国家航空航天局陆地过程分布式数据档案中心 (LPDAAC, https:∥e4ftl01.cr.usgs.gov/GEDI/GEDI02_A.002/)公开获得,数据采集日期为2019年4月到2020年9月。对于每个光斑,GEDI L2A采用6种不同算法获取对应的地面高程、冠顶高程、相对高程[15],这些算法是通过设置不同的参数组得出的(见表1)[11],每种算法采用相同的噪声平滑宽度,不同之处在于波形信号的平滑宽度、波形信号的开始阈值与结束阈值。其中,波形信号平滑宽度影响波形信号的平滑程度;波形信号开始阈值决定森林冠层顶部的位置,波形信号结束阈值决定地面高程的位置。该数据集还提供了每个光斑的质量标志、降级标志等与波形质量相关的参数,用于剔除无效的GEDI光斑。
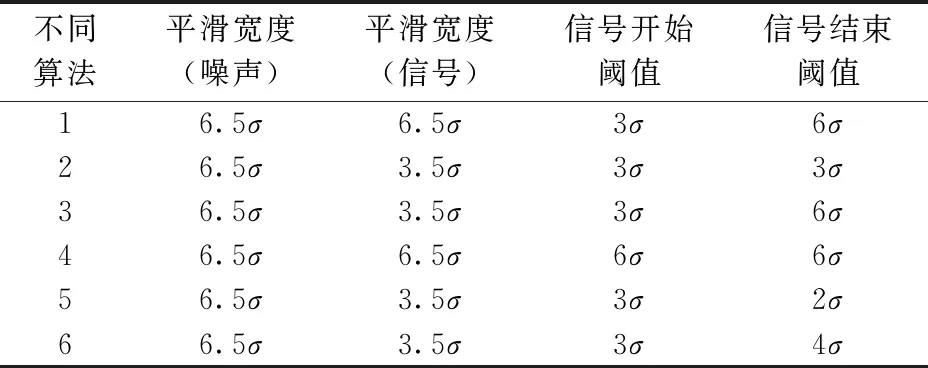
表1 GEDI L2A 6种不同算法的参数设置(σ表示背景噪声的标准差)
2) 机载激光雷达数据
为评估GEDI数据中地面高程和森林冠层高度的精度,以机载激光雷达数据获取的DTM及CHM作现场测量的替代数据[16]。本文选择的机载激光雷达数据来源于国家生态观测网络(national ecological observatory network, NEON)[17],获取的 DTM与CHM数据空间分辨率为1 m,水平精度为5~15 cm,垂直精度为5~35 cm[18],其评价依据是与地块实测数据进行验证得到的[19]。考虑到GEDI光斑大小约25 m,DTM的值用25 m×25 m栅格范围内的平均值作为地面高程,CHM的值选用25 m×25 m栅格范围内第90百分位值作为森林冠层高度[12]。
5个研究区ALS数据采集日期分别为2019年4月(TALL)、2019年8月(HARV)、2019年6月(TEAK)、2019年7月(WREF)和2019年8月(NIWO),与GEDI数据采集日期比较接近,避免了因数据采集时间不一致而出现的误差。研究区详细信息如表2,其中,研究区TEAK、NIWO的平均坡度较大,平均覆盖度较小;HARV、TALL平均坡度较小,平均覆盖度较大;WREF平均坡度最大,平均覆盖度最大。
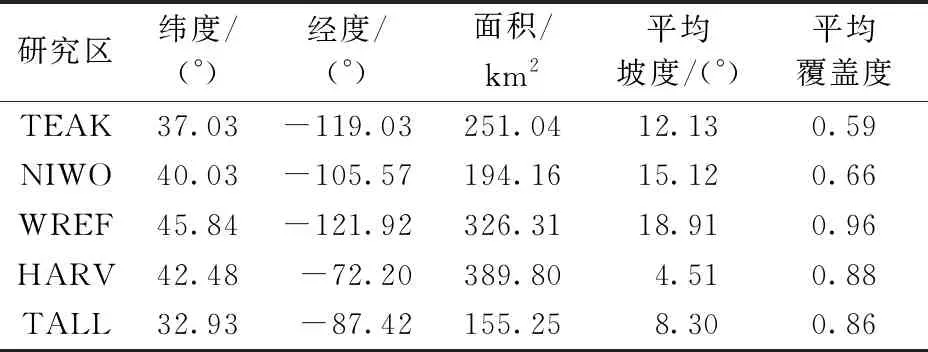
表2 研究区机载激光雷达数据详细信息
3)森林冠层高度及植被覆盖度数据
根据GEDI L2A自带参数进行有效光斑筛选,并提取有效光斑的地面高程值和森林冠层高度的相对高度度量值(间隔为1%)。为得到GEDI L2A森林冠层高度与ALS获得的森林冠层高度相关性最好的相对高度指标,分析默认最优算法中rh90、rh92、rh94、rh96、rh98、rh100与ALS森林冠层高度的相关性(表3)。可以看出,随着森林冠层高度百分位数的增加,GEDI与ALS的R2先增大后减小,RMSE先减小后增大,在GEDI百分位树高为rh96时,GEDI与ALS森林冠层高度的相关性最高,因此本文选择rh96的值作为GEDI森林冠层高度的值。

表3 机载LiDAR提取rh90和GEDI森林冠层高度百分位参数的比较结果
植被覆盖度的计算是由机载CHM以25 m为格网大小计算得出,即每个格网中CHM值大于等于2 m的栅格单元与格网内所有栅格单元的比值即为植被覆盖度。将植被覆盖度以0.2为间隔分为5个等级,5个研究区在不同植被覆盖度下光斑分布的情况如表4所示。可以看出TALL、WREF、HARV研究区的光斑大多分布于覆盖度大于等于0.8的地区,TEAK、NIWO研究区的光斑多分布在覆盖度小于0.8的地区。
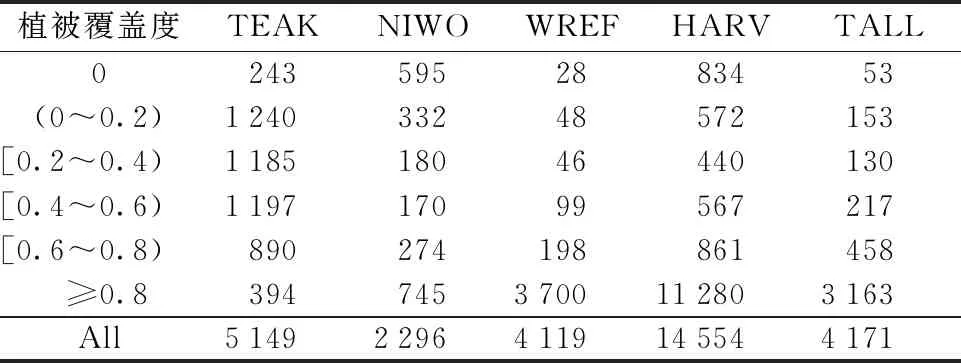
表4 研究区在不同覆盖度下的光斑分布情况
2.2 实验结果
2.2.1 不同算法对GEDI L2A提取地面高程和森林冠层高度的影响
统计5个研究区所有GEDI光斑在不同覆盖度下采用不同算法得到的地面高程、森林冠层高度,并计算与ALS地面高程、森林冠层高度的相关性,表5为二者相关性结果。其中,计算地面高程时,采用所有GEDI光斑,计算森林冠层高度时,删除植被覆盖度等于0的光斑。
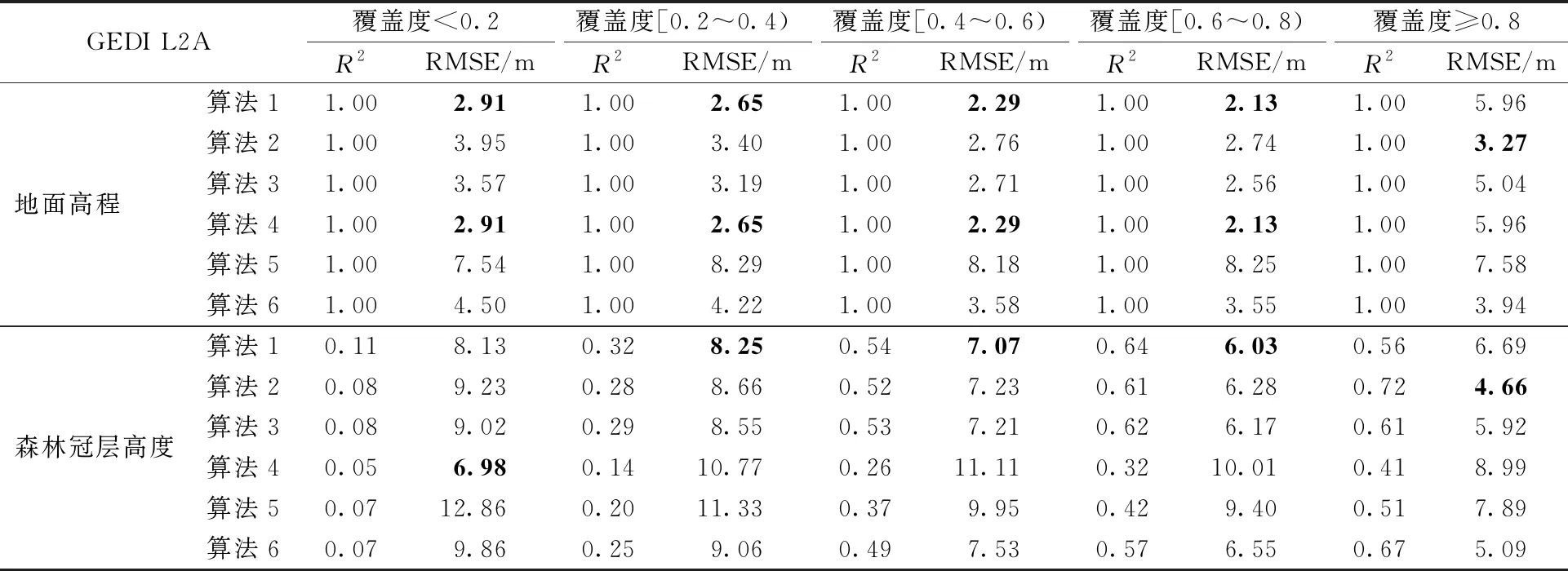
表5 不同覆盖度下不同算法的GEDI L2A与ALS相关性
对于GEDI L2A地面高程而言,除算法1和算法4的RMSE相同,其余算法在不同覆盖度下获得地面高程与机载地面高程的RMSE均有差异。在植被覆盖度小于0.8时,算法1或算法4的结果优于其他算法的结果;在覆盖度大于等于0.8时,算法2的结果优于其他算法的结果,所有算法中,算法5的RMSE值最大,精度最差。
对于GEDI L2A森林冠层高度而言,不同算法在不同覆盖度下获得的森林冠层高度与ALS森林冠层高度的RMSE各不相同。在植被覆盖度小于0.2时,算法4得到的结果优于其他算法的结果,植被覆盖度大于等于0.8时,算法2的结果优于其他算法的结果,覆盖度为0.2~0.8时,算法1的结果优于其他算法,所有算法中,算法5的RMSE值最大,精度最差。
综合地面高程与森林冠层高度在不同覆盖度下的最优算法,得出在植被覆盖度小于0.2时选择算法4,在植被覆盖度大于等于0.8时选择算法2,其余覆盖下选择算法1的结果能提高GEDI L2A地面高程和森林冠层高度的估算精度。
2.2.2 不同条件下默认最优算法与本文最优算法对比
GEDI L2A第2版数据提供了每个光斑的默认最优算法,本文根据植被覆盖度也得到每个光斑的最优算法,由于不同外界条件(植被覆盖度、坡度)均会影响DTM和CHM提取的精度,以机载LiDAR为参考数据,统计5个研究区所有GEDI光斑的R2与RMSE,对不同覆盖度及不同坡度下默认最优算法和本文最优算法的精度进行比较,表6和表7分别为不同条件下默认最优算法与本文最优算法的结果。可以看出,无论是默认最优算法还是本文最优算法,GEDI L2A对DTM估计值的精度明显高于对CHM估计值的精度,原因可能是CHM垂直结构信息更为复杂。
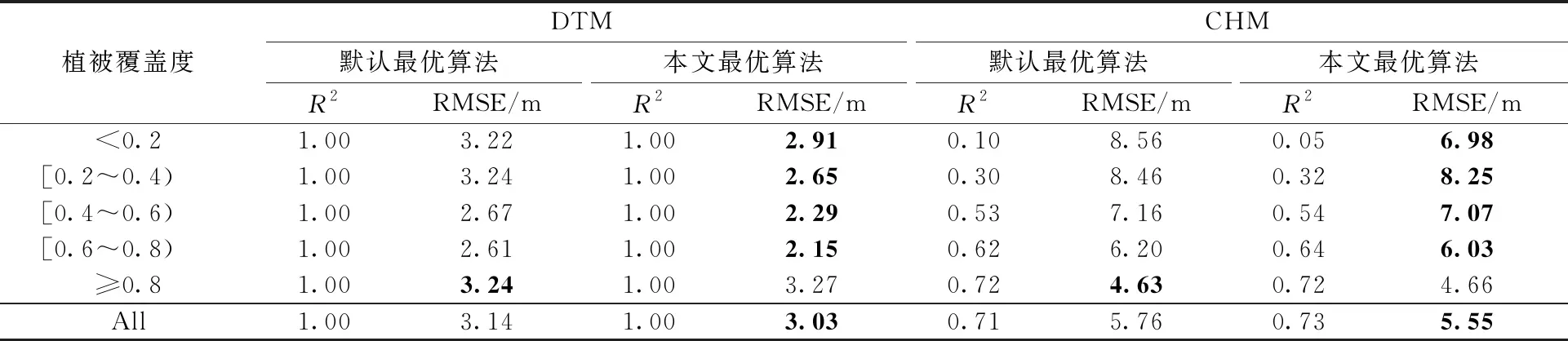
表6 不同覆盖度下默认最优算法与本文最优算法结果对比
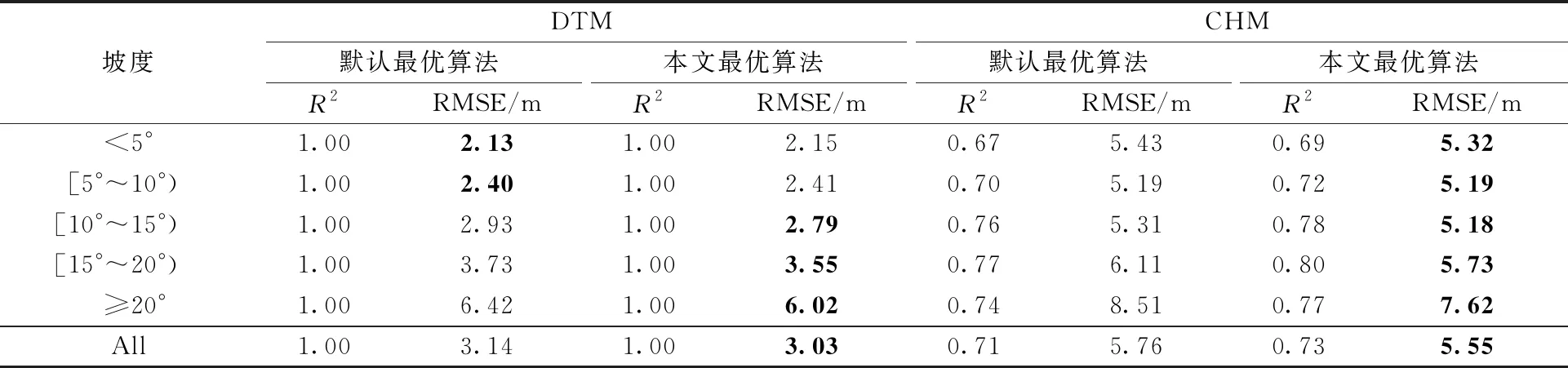
表7 不同坡度下默认最优算法与本文最优算法结果对比
从表6可以看出,DTM在植被覆盖度小于0.8时,本文最优算法的精度明显优于默认最优算法的精度,在植被覆盖度大于等于0.8时,本文最优算法与默认最优算法无明显差别(本文最优算法精度略低于默认最优算法精度);对于CHM而言,在植被覆盖度小于0.8时,本文最优算法的精度优于默认最优算法的精度,在植被覆盖度大于等于0.8时,两种最优算法的估算精度无明显差别(本文最优算法精度略低于默认最优算法精度),说明本文的最优算法更适合用于植被覆盖度小于0.8的地区。整体看来,本文选择的最优算法比默认最优算法的精度更高,DTM方面R2无变化,RMSE减小0.11 m,CHM的R2提高0.02,RMSE减小0.21 m。
从表7可以看出,DTM在坡度小于10°时,默认算法与本文算法无明显差别,在坡度大于等于10°时,本文最优算法优于默认最优算法,且坡度越大,本文最优算法提取的DTM精度越高。对于CHM而言,在坡度小于10°时,默认最优算法与本文最优算法相差不大,在坡度大于等于10°时,本文最优算法优于默认最优算法,坡度越大,本文最优算法提取的CHM精度越高。因此,本文选择的最优算法更适合估算坡度大于等于10°的区域。
2.2.3 各研究区默认最优算法与本文最优算法的散点图对比
图3显示了每个研究区GEDI地面高程、森林冠层高度与ALS地面高程、森林冠层高度之间两种最优算法的散点图。可以看出5个研究区中,研究区TEAK(图3(a))和研究区NIWO(图3(b))的DTM、CHM相比默认最优算法提高的精度最大,其余研究区两种算法的DTM、CHM的RMSE无明显差别,主要原因是研究区TEAK 、NIWO的覆盖度较低,且坡度较大,本文选择的最优算法更适合覆盖度小于0.8,坡度大于等于10°的地区。而研究区HARV、WREF、TALL平均覆盖度都大于0.8,由表6可知当覆盖度大于等于0.8时,默认算法与本文算法提取的精度相差不大。
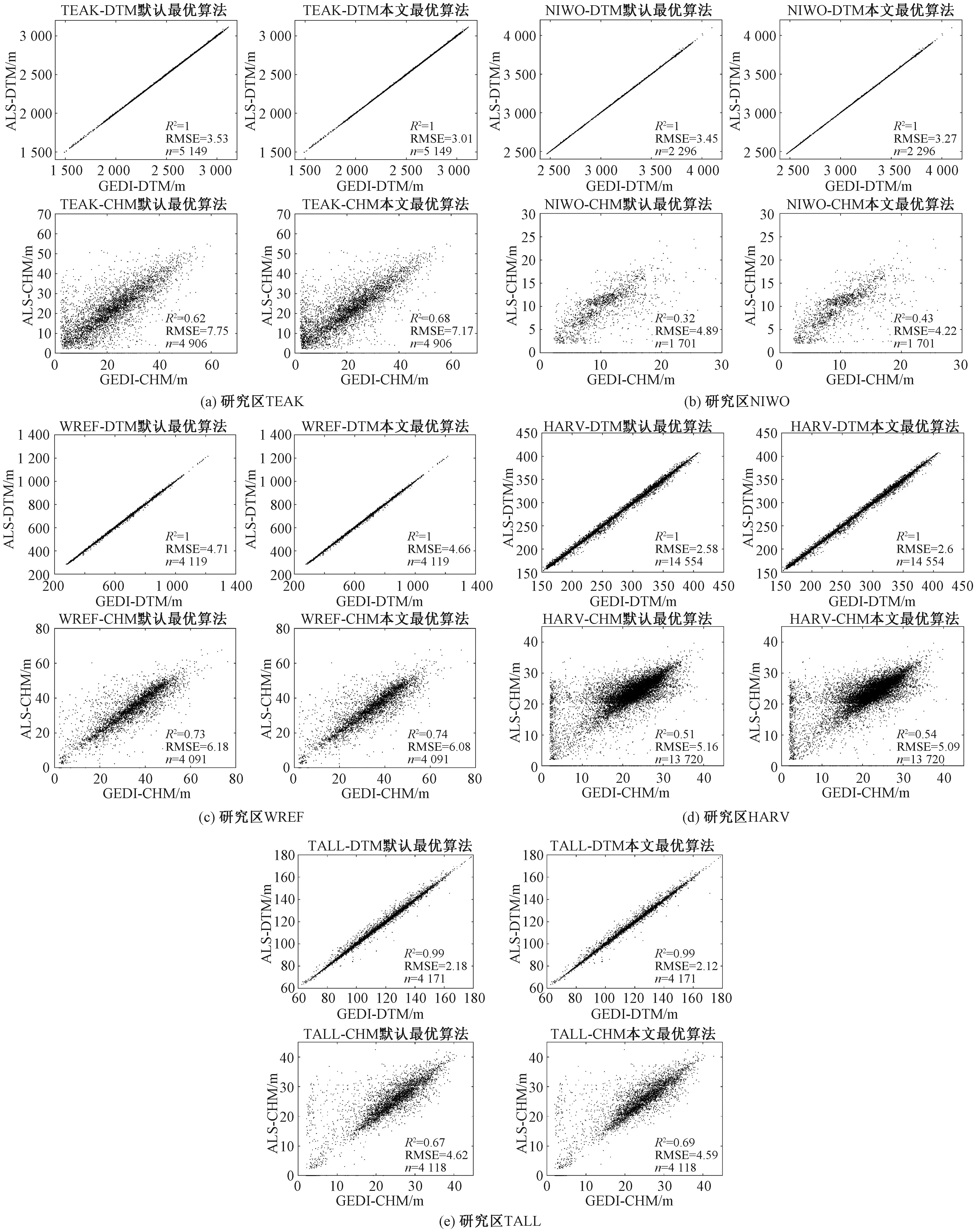
图3 不同研究区两种最优算法的散点图对比
2.3 讨论
不同算法之间是通过改变波形信号平滑宽度、信号开始阈值、信号结束阈值来达到控制波形长度的目的。算法1是设计用于大多数情况,其他算法组设计目的是在观测条件不太理想的情况下提供信息。
对于GEDI L2A DTM不同算法分析,在植被覆盖度小于0.8时,激光脉冲能透过冠层直达地面获取地面回波信息,适用于大多数情况下的算法1能够获取较为准确的DTM,而算法1和算法4的区别在于信号的开始阈值不同,这只会影响CHM的值,不会影响DTM的值,因此算法1和算法4 DTM的值总是相同的。算法3虽然有与算法1相同的波形信号结束阈值,但其信号平滑宽度更小,不能很好地消除噪声带来的影响。算法2、5、6的波形信号结束阈值比1更低,导致检测到低于实际地面回波信号的噪声,造成DTM的低估,其中算法5因有最低信号结束阈值,获得的DTM精度最差。在植被覆盖度大于等于0.8时,激光脉冲不能完全透过茂密的冠层准确获取地面回波信息,适用于大多数情况下的算法1由于其最高波形信号结束阈值,已经不能准确获取DTM导致精度降低,算法3、4有与算法1相同的波形信号结束阈值,也不能准确获取地面信息,算法5因有最低信号结束阈值造成DTM的低估,使获得的DTM精度最差。算法2、6的波形信号结束阈值比较适中,在覆盖度大于等于0.8时的DTM精度相对较高,二者相比,具有更低结束阈值的算法2更能够去除一些低矮灌木的影响,获取比算法6更为准确的DTM。
对于GEDI L2A CHM不同算法分析,在植被覆盖度小于0.2时,波形记录是由较低的树冠层或地面返回信号触发的,此时波形信号起点和地面高程之间的高度差较低或(接近)为零,选择算法4是因其具有最高的波形信号开始阈值与结束阈值,可获得最短的波形长度,得到更为准确的CHM值,其他算法的波形长度均比算法4的波形长度更长,导致CHM估计的精度较差。在植被覆盖度大于等于0.8时,树冠顶部的返回信号能很好地超过波形记录开始阈值,选择算法2是因为其信号平滑的宽度最小,信号开始阈值最小,能获得除算法5以外最长的波形长度,获得更为准确的CHM。算法5虽然能获取最长的波形长度,但由于信号结束阈值最低造成DTM的低估,从而导致获得的CHM被高估。其余覆盖度下,适用于大多数情况的算法1的取得的精度最高,算法4虽然与算法1有着相同的波形信号平滑阈值与信号结束阈值,但由于有较高的波形信号开始阈值,而导致CHM被低估。算法3虽然与算法1有着相同的波形信号开始阈值与信号结束阈值,但由于波形信号平滑宽度最小,不能很好地消除噪声的影响导致CHM的精度较差。
因此,根据植被覆盖度选择最优算法的方法能很好地提高GEDI L2A对DTM和CHM估算的精度。
3 结论
不同环境选择不同算法对于GEDI的精度有一定的影响,在植被覆盖度小于0.2时选择算法4,植被覆盖度大于等于0.8时选择算法2,其余覆盖度下选择算法1的结果比单独使用一种算法的结果估算精度更高,这为GEDI数据在不同环境选择合适的算法提出了一种判定方法。
GEDI L2A第2版数据提供了每个光斑默认最优算法,将默认最优算法与本文最优算法进行对比,发现在植被覆盖度大于等于0.8,或者坡度小于10°时,两种最优算法估算的DTM和CHM精度无明显差别,在植被覆盖度小于0.8,且坡度大于等于10°时,本文最优算法精度明显优于默认最优算法精度,说明本文最优算法在特定环境下能很好地估计DTM与CHM,这为后面的研究以及提高GEDI L2A精度具有重要的意义。
文中的参考数据是基于机载激光雷达数据得到的DTM与CHM,虽然获取的数据精度远高于GEDI数据,但是也包含某些误差(例如对森林冠层高度的低估),这对本文GEDI L2A DTM和CHM的精度也有一定的影响。其次,影响GEDI L2A精度的因素还有很多,包括外界环境与GEDI仪器自身的影响,未来也将从这两个方面继续研究影响GEDI精度的因素。
