大型深海AUV无动力螺旋下潜运动特性分析
2022-07-05谷海涛孟令帅赵志超
高 伟,张 玮,谷海涛,孟令帅,高 浩,赵志超
(1.中国科学院沈阳自动化研究所机器人学国家重点实验室,辽宁 沈阳 110016;2.中国科学院机器人与智能制造创新研究院,辽宁 沈阳 110169;3.中国科学院大学,北京 100049;4.中国人民解放军海军研究院,北京 100161)
深海区蕴含着丰富的矿物和能源资源,具有重大经济和战略价值[1]。近30年来,为了更好地开发和利用深海资源,载人潜水器(human occupied vehicle,HOV)、自主水下航行器(autonomous underwater vehicle,AUV)等深海装备取得了长足发展,被广泛应用于深海科学、深海工程以及国防军事等领域[2-3]。其中,深海AUV技术一直是AUV领域的研究热点。
通常情况下,依据深海AUV艇体口径,可将其分成 4个级 别[4]:小型(76~253 mm)、中型(254~533 mm)、大型(534~2 133 mm)和重型(>2 133 mm)。随着中小型深海AUV技术的逐渐成熟,载荷复杂多样的高可靠大型深海AUV的研制被提上日程。大型深海AUV的下潜深度大,采用无动力螺旋方式下潜着陆,可有效节约能耗及减小水平面漂移距离。为了合理地设计大型深海AUV,掌握其无动力螺旋下潜运动规律,须对其在不同净负浮力和重心位置下的螺旋运动特性进行分析。
目前,许多学者对中小型深海AUV,尤其是水下滑翔机的无动力运动特性展开了研究。例如:顾建农等[5]基于柯西霍夫方程得到了水下滑翔机的空间运动方程,并分析了HUST-2号水下滑翔机的滑翔运动和回转运动特性。孙秀军等[6]采用动力学理论对Petrel-Ⅱ200水下滑翔机进行建模,并利用CFD(computational fluid dynamics,计算流体力学)软件计算了所需的水动力系数,探索了水下滑翔机各模块的质量及质心相对于浮心的矢径与其位姿和回转性能之间的关系。于鹏垚等[7]基于水下滑翔机的动力学模型,开展了稳态运动仿真,分析了水下滑翔机各运动速度分量与滑块纵向位置、滑块转角和净浮力之间的关系。Zhang等[8]基于拉格朗日方程推导了Seawing水下滑翔机的动力学模型,并提出了一种用于求解螺旋运动参数的递归算法,所得仿真结果与试验结果吻合。Cao等[9]详细阐述了水下滑翔机水动力系数的计算方法,并通过仿真分析验证了所设计水下滑翔机的可行性。综上所述,目前对AUV无动力运动模拟的研究主要是通过先建立其动力学模型并求解水动力系数,然后采用数值求解方法得到不同时刻下AUV的状态参数。
基于此,笔者结合某大型深海AUV的总体布局特点,首先基于拉格朗日方程推导其动力学模型,并利用CFD软件计算所需的水动力系数;然后通过MATLAB/Simulink和S函数建立其运动仿真模型,以分析其静力配置参数与无动力螺旋下潜稳态参数之间的关系;最后通过缩比样机水池试验来验证动力学仿真结果的正确性,旨在为大型深海AUV无动力螺旋下潜时的静力配置提供参考。
1 大型深海AUV的总体布局及其动力学模型
1.1 总体布局
大型深海AUV主要由艇体、艏升降舵、艉升降鳍舵和艉方向鳍舵(仅上鳍舵)组成,其总体布局如图1所示。其中,艇体采用三段式设计,分为艏部段、舯部段和艉部段,其外形以Nystrom线型为母线旋转得到实体后在外侧切除2.0 m×2.0 m的正方形获得,其总长度为16.0 m;艏升降舵和艉方向鳍舵的平面形状分别为梯形和切尖三角形,均采用NACA0015剖面翼型。大型深海AUV的浮心位置在水平方向上距艏部端面7.314 00 m,垂直方向上距艇体中间平面0.004 67 m处,满载排水质量为50 063.74 kg,各方向转动惯量为:Ixx=27 740.35 kg·m2,Iyy=840 936.58 kg·m2,Izz=840 940.64 kg·m2。
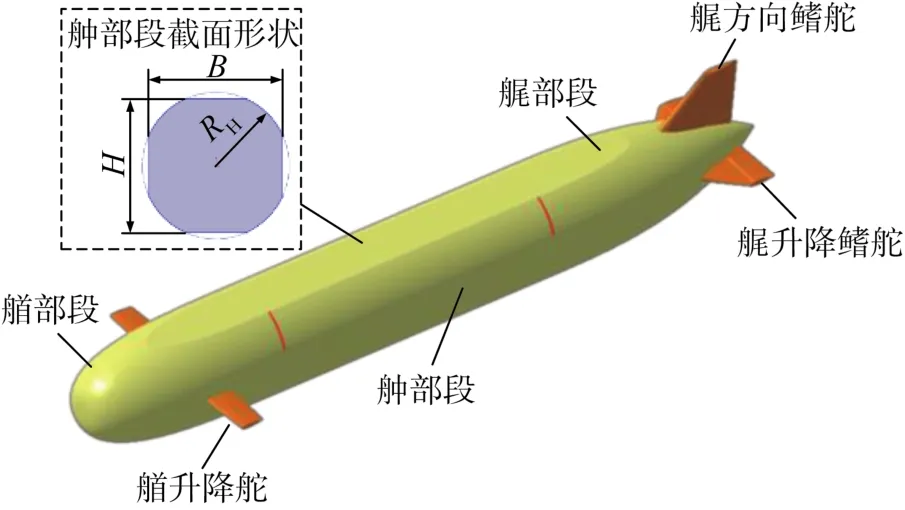
图1 大型深海AUV的总体布局Fig.1 Overall layout of large deep-sea AUV
1.2 动力学模型
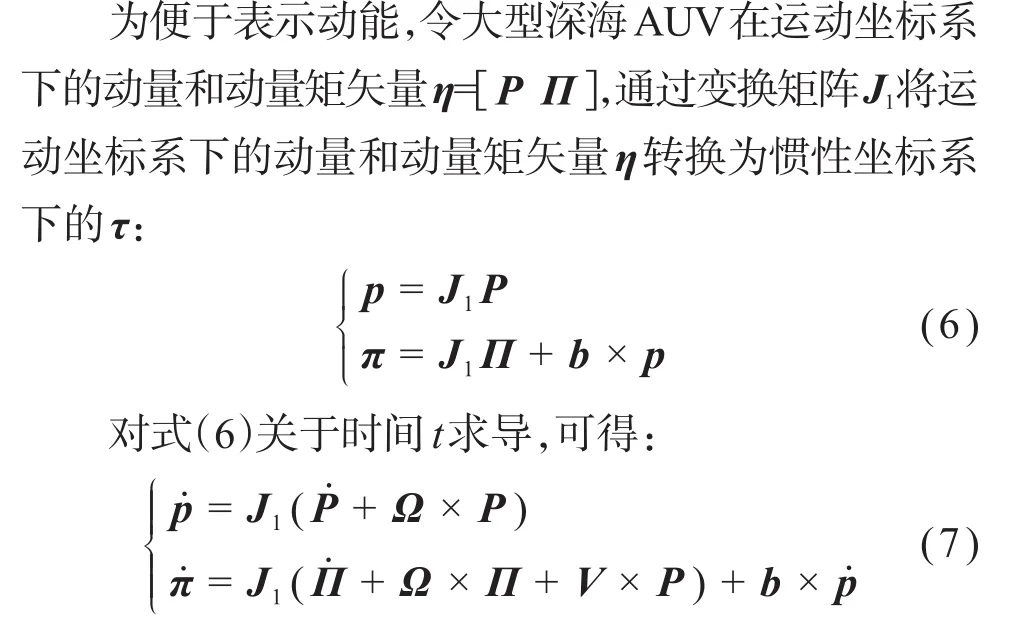
本文采用拉格朗日方程建立大型深海AUV的动力学模型,具体步骤如下[8]:首先,在惯性坐标系下描述AUV的受力情况;然后,计算AUV的动能并对速度求导,获得其动量,并对动量关于时间求导,获取运动坐标系下AUV所受的合外力;最后,通过坐标变换将速度坐标系下AUV所受的水动力和水动力矩转换为运动坐标系下的。
1.2.1 坐标系构建
为便于分析大型深海AUV的运动和受力情况,建立相应的惯性坐标系、运动坐标系和速度坐标系,如图2所示,各坐标轴均按右手定则确定。其中,惯性坐标系原点E0位于空间内某一点,η轴、ξ轴分别指向正北和正东,ζ轴指向地心为正向。运动坐标系以AUV的浮心为原点,i轴平行于艇体基线,指向艏部为正向;j轴平行于基线面,指向右舷为正向;h轴指向艇体底部为正向。速度坐标系也以AUV的浮心为原点,其各轴方向与AUV的攻角α和漂角β有关,由运动坐标系绕j轴旋转-α,再绕h轴旋转β后获得,其中π1轴方向与AUV的速度方向一致。

图2 大型深海AUV坐标系构建Fig.2 Construction of coordinate system of large deep-seaAUV
令大型深海AUV的浮心在惯性坐标系中的空间位置向量b=[xy z]T,姿态角矩阵Θ=[φθψ]T。在运动坐标系下,该AUV浮心处的速度为V,角速度为Ω,其沿3个坐标轴方向的分量分别为u、v、w和p、q、r;其所受外力F和力矩M沿3个坐标轴方向的分量分别为X、Y、Z和K、M、N。规定速度和力的方向与运动坐标系坐标轴方向一致,角速度和力矩的方向按右手定则判定。

1.2.2 受力分析
定义在惯性坐标系下大型深海AUV的动量为p,动量矩为π,令τ=[p π]。根据质心运动定理和动量矩定理,惯性坐标系下大型深海AUV所受的力和力矩为:
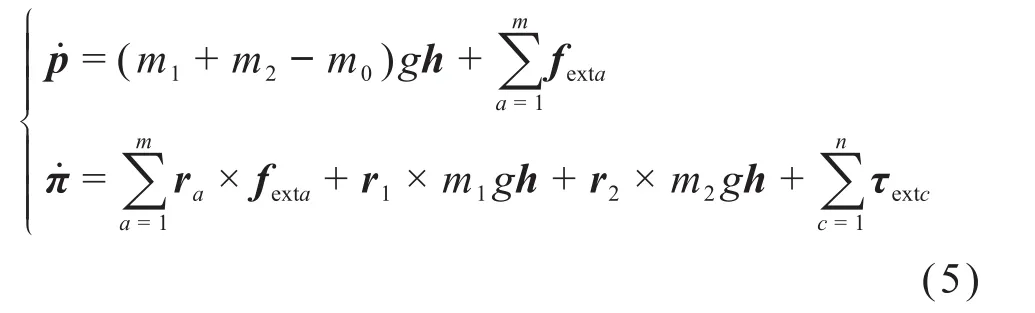
式中:m1、m2、m0分别为大型深海AUV的固定质量、压载质量和排水质量;g为重力加速度;h为运动坐标系h轴的单位方向向量;r1、r2分别为固定质量块和压载质量块质心相对于运动坐标系原点e0的矢径;fexta、τextc分别为大型深海AUV在惯性坐标系下所受的外力和外力矩;ra为惯性坐标系下fexta的作用点相对于e0的矢径。


2 大型深海AUV的水动力系数计算
2.1 数值模拟计算方法
采用CFD软件计算大型深海AUV动力学模型中的水动力系数。为减少计算量,采用雷诺时均纳维-斯托克斯(Navier-Stokes,N-S)方程作为控制方程[12]。假设流体为不可压缩的连续介质,且不考虑热交换,则雷诺时均化后流体的平均质量和动量传输方程可表示为:
式中:ρ为流体密度分别为流体的平均速度和平均压力;O为黏性应力张量;fb为体积力的合力。
大型深海AUV的流体计算域及边界条件如图3所示。其中:计算域为92 m×40 m×40 m的长方体,右侧为压力出口边界,出口压力设定为0 Pa;其他侧面均为速度入口边界,入口速度设定为1.028 8 m·s-1;AUV表面边界为壁面条件,艇体和鳍舵周围为局部加密区域。

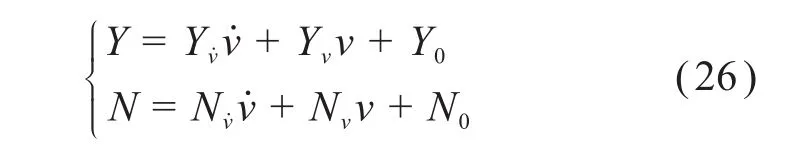
图3 大型深海AUV的流体计算域及边界条件Fig.3 Fluid computational domain and boundary conditions of large deep-sea AUV
采用切割体网格生成器生成的六面体网格对大型深海AUV的流体计算域进行网格划分,并在壁面及其周围流场采取网格加密处理,边界层处加入8层棱柱网格以有效模拟近壁面处的流体流动。为了选取合适的网格基本尺寸,以尽可能少的网格数量获得较高的计算精度,使用7种不同的网格基本尺寸计算来流流速为1.028 8 m·s-1工况下大型深海AUV直航运动时的阻力系数,其中湍流模型选择SSTk-ω模型,求解器选择隐式不定常求解器,固定时间步长为0.05 s,计算结果如表1所示。表中:CD为阻力系数;ΔCD为阻力系数的相对误差。

表1 大型深海AUV数值模拟的网格无关性验证结果Table 1 Grid irrelevance verification results of numerical simulation of large deep-sea AUV
从表1中可以看出,当网格基本尺寸小于0.72 m时,大型深海AUV直航运动时的阻力系数计算值的变化幅度较小。考虑到计算资源,最终选用网格基本尺寸为0.60 m进行数值模拟计算。
2.2 直航试验数值模拟
数值模拟时通过调整来流流速来改变大型深海AUV的运动速度。设置来流流速为0.2572~2.0576m·s-1,不同流速间隔为0.257 2 m·s-1。采用CFD软件对8种来流流速工况下大型深海AUV的直航试验进行数值模拟,得到的阻力如表2所示。

表2 不同直航试验工况下大型深海AUV阻力的数值模拟结果Table 2 Numerical simulation results of large deep-sea AUV resistance under different direct route test conditions
对表2中的直航阻力计算结果进行二次函数拟合,得到大型深海AUV直航运动时的阻力公式为:

2.3 斜航试验数值模拟
设置来流流速为1.028 8 m·s-1并保持不变,将大型深海AUV旋转一定的角度,计算不同斜航试验工况(攻角α,漂角β和舵角δb、δs、δr不同,如表3所示)下AUV所受的水动力,并通过最小二乘线性回归法拟合得到相应的水动力系数[13]。
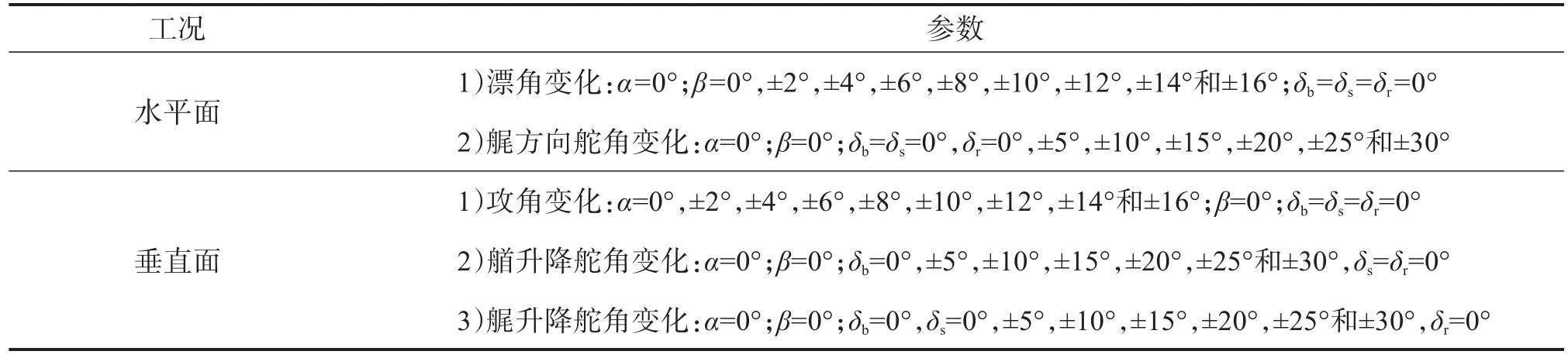
表3 大型深海AUV的斜航试验数值模拟工况设计Table 3 Numerical simulation working condition design for oblique towing test of large deep-sea AUV
根据CFD模拟结果,得到大型深海AUV在斜航运动过程中所受力与力矩的变化规律及其拟合结果,如图4所示(部分结果)。
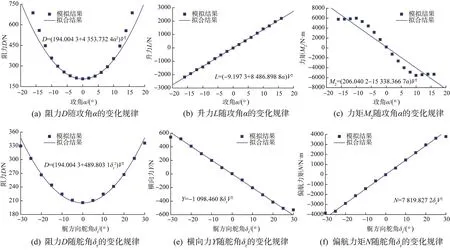
图4 大型深海AUV斜航试验数值模拟结果(部分)Fig.4 Numerical simulation results of oblique towing test of large deep-sea AUV(part)
2.4 悬臂水池试验数值模拟
悬臂水池试验数值模拟是指在相对静止的条件下以“静态”网格计算水动力,以避免大量的流域重建、网格划分等重复性工作。在该模拟过程中,须将惯性坐标系变换至运动坐标系。设大型深海AUV的切向运动速度为1.028 8 m·s-1,使其绕不同半径作回转运动,利用CFD软件计算不同悬臂水池试验工况(攻角、漂角和角速度不同,如表4所示,表中R为回转半径,lt为AUV艇体长度)下AUV所受的水动力,并通过最小二乘线性回归法拟合得到相应的水动力系数。

表4 大型深海AUV的悬臂水池试验数值模拟工况设计Table 4 Numerical simulation working condition design of cantilever pool test of large deep-sea AUV
根据CFD模拟结果,得到大型深海AUV在悬臂回转运动过程中所受力与力矩的变化规律及其拟合结果,如图5所示(部分结果)。
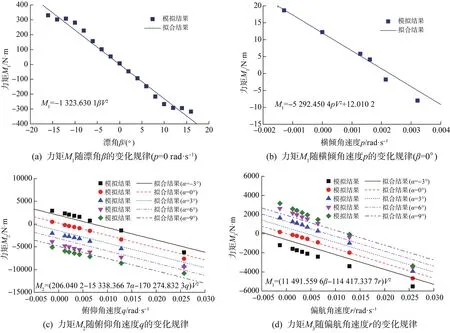
图5 大型深海AUV悬臂水池试验数值模拟结果(部分)Fig.5 Numerical simulation results of cantilever pool test of large deep-sea AUV(part)
2.5 平面运动机构试验数值模拟
平面运动机构试验包含纯横荡运动、纯升沉运动、纯摇艏运动和纯俯仰运动四种运动。以大型深海AUV作纯横荡运动为例,利用CFD软件对其进行平面运动机构试验数值模拟,以求取加速度相关的水动力系数。
大型深海AUV的纯横荡运动参数设置如下:

式中:A、ω分别为大型深海AUV作横荡运动的振幅和圆频率。
取振荡频率f=0.10,0.15和0.20 Hz,振幅A=0.2 m,大型深海AUV的纵向运动速度恒定为1.028 8 m·s-1。利用CFD软件进行数值模拟,可得该AUV在纯横荡运动过程中所受的横向力和偏航力矩随时间的变化曲线及拟合结果,分别如图6和图7所示。

图6 纯横荡运动过程中大型深海AUV所受横向力的变化规律Fig.6 Variation law of lateral force of large deep-sea AUV during pure sway motion
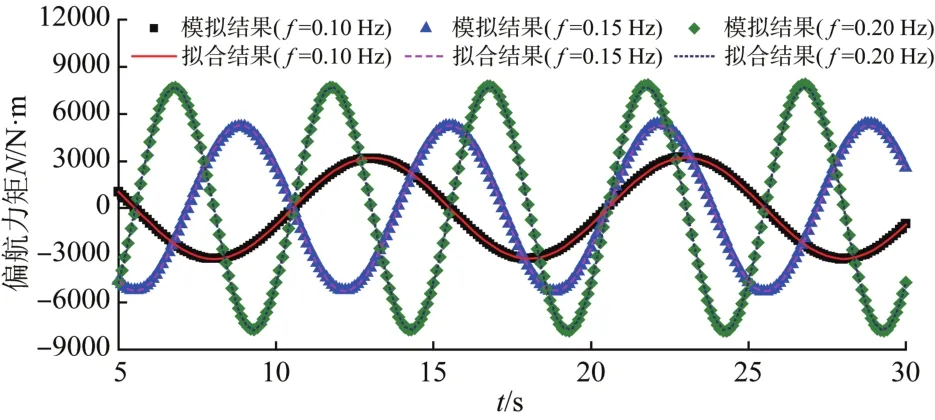
图7 纯横荡运动过程中大型深海AUV所受偏航力矩的变化规律Fig.7 Variation law of yaw moment of large deep-sea AUV during pure sway motion
根据拟合结果可得,在纯横荡运动过程中,大型深海AUV所受的横向力和偏航力矩满足如下线性关系:
通过最小二乘线性回归法拟合得到不同振荡频率下大型深海AUV作纯横荡运动时的加速度相关水动力系数,如表5所示。
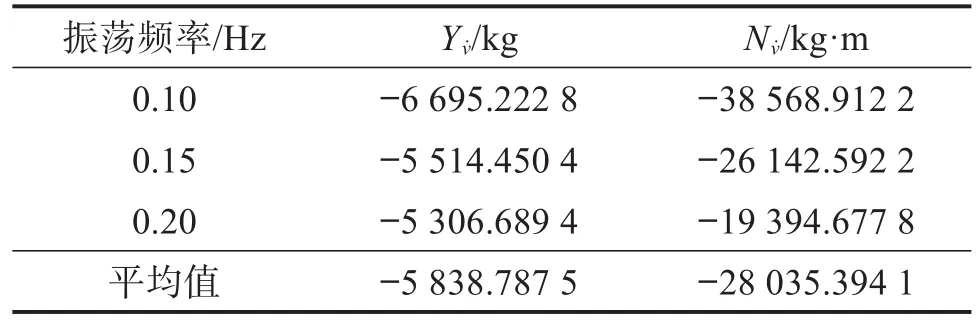
表5 不同振荡频率下大型深海AUV的加速度相关水动力系数拟合结果Table 5 Fitting results of acceleration dependent hydrodynamic coefficient of large deep-sea AUV under different oscillation frequencies
同理可得与纯升沉运动、纯摇艏运动、纯俯仰运动以及直航变速运动相关的大型深海AUV的加速度相关水动力系数。最终得到的大型深海AUV水动力系数计算结果如表6所示。

表6 大型深海AUV水动力系数计算结果Table 6 Calculation results of hydrodynamic coefficient of large deep-sea AUV
3 大型深海AUV无动力螺旋下潜运动仿真分析
3.1 运动仿真模型构建
基于所构建的动力学模型,利用MATLAB/Simulink和S函数建立大型深海AUV的六自由度运动仿真模型,如图8所示。该仿真模型共有6个控制参数:净负浮力W、重心纵向位移xg、稳心高度zg、艏升降舵角δb、艉升降舵角δs和艉方向舵角δr。采用Runge-Kutta(龙格-库塔)法求解该AUV无动力螺旋下潜时的状态参数。
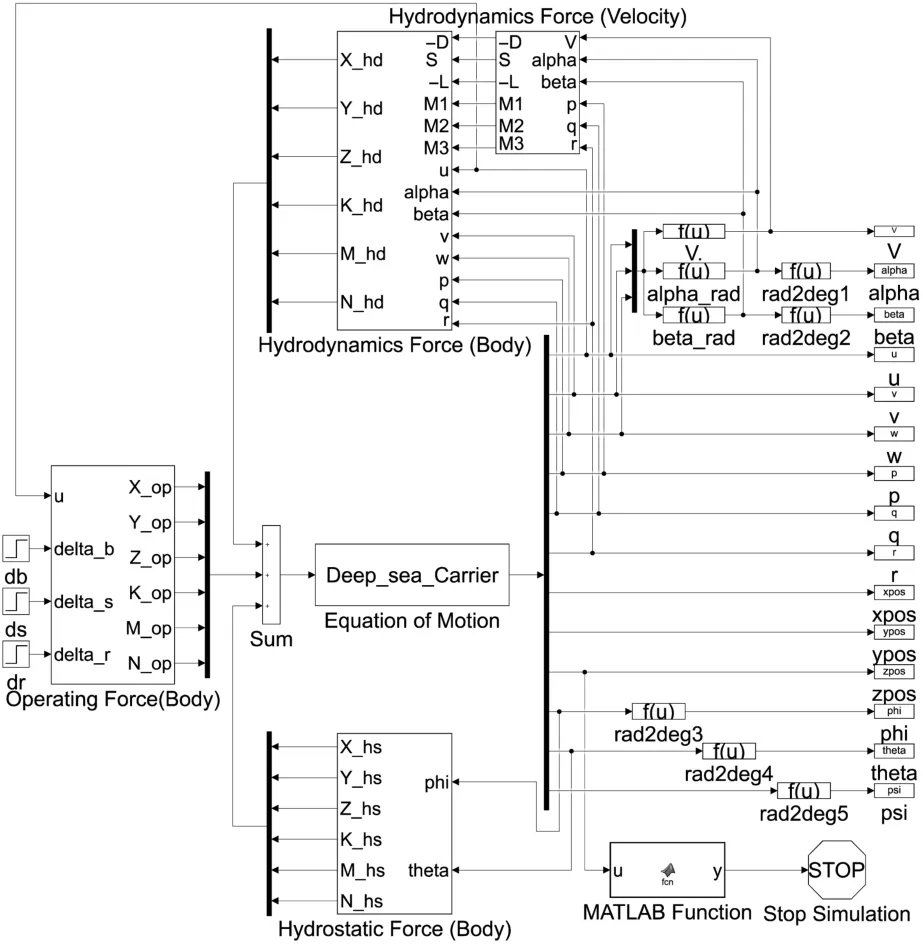
图8 大型深海AUV的六自由度运动仿真模型Fig.8 Six-degree-of-freedom motion simulation model of large deep-sea AUV
图9所示为给定推力条件下大型深海AUV直航速度的动力学仿真结果与CFD模拟结果对比,由图可知两者基本吻合。

图9 不同推力下大型深海AUV的直航速度对比Fig.9 Comparison of direct route speed of large deep-sea AUV under different thrusts
3.2 无动力螺旋下潜稳态特征分析
大型深海AUV主要依靠压载提供下潜动力,通过偏转艉方向舵产生横向力和偏航力矩,从而实现螺旋下潜。将该AUV的初始状态参数作置零处理,给定控制参数值:W=1 000 N,xg=0.112 5 m,zg=0.20 m,δb=0°,δs=0°,δr=20°,通过仿真得到其无动力螺旋下潜运动轨迹,如图10所示(对于垂向位移,规定下潜方向为正方向),各状态参数随时间的变化规律如图11所示。

图10 大型深海AUV无动力螺旋下潜运动轨迹Fig.10 Unpowered spiral diving trajectory of large deepsea AUV
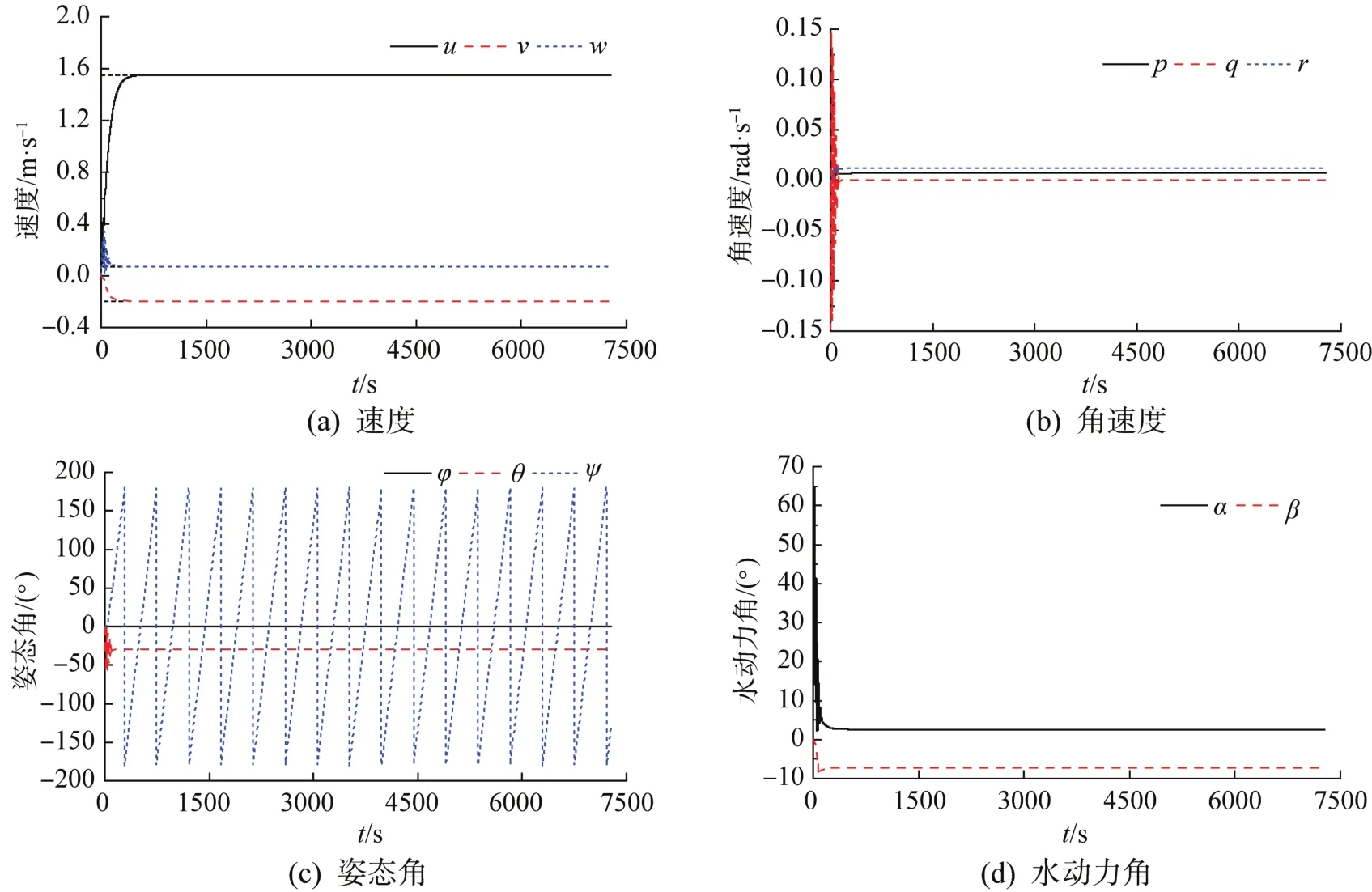
图11 大型深海AUV无动力螺旋下潜状态参数随时间的变化规律Fig.11 Variation law of state parameters of large deep-sea AUV unpowered spiral diving with time
由仿真结果可得,大型深海AUV在650 s后以恒定的速度和角速度作稳态螺旋下潜运动,各状态参数如下:纵向速度为1.5506m·s-1,横向速度为-0.1965m·s-1,垂向速度为0.069 8 m·s-1,横倾角速度为0.006 8 rad·s-1,纵倾角速度为0 rad·s-1,偏航角速度为0.011 8 rad·s-1,横倾角为 0.437 5°,纵倾角为-29.977 2°,攻角为2.578 7°,漂角为-7.215 5°,螺旋回转直径为194.66 m,螺距为385.24 m,螺旋回转周期为461.95 s,下潜6 000 m深度用时7 273 s,约2.02 h。由此可以看出,当大型深海AUV稳态螺旋下潜时,除艏向角和位置分量外,其余各状态参数均为常数,则对应的水动力和水动力矩也为常数。
通过控制单一变量,可得大型深海AUV无动力螺旋下潜稳态参数与其静力配置参数之间的关系。
1)净负浮力变化。令100 N≤W≤2 500 N,xg=0.112 5 m,zg=0.20 m,δb=0°,δs=0°,δr=20°,通过仿真分析得到净负浮力对大型深海AUV无动力螺旋下潜稳态参数的影响,结果如图12所示(Vζ为惯性坐标系下AUV下潜速度沿ζ方向的分量,下文同)。由图可以看出,净负浮力作为大型深海AUV螺旋下潜的主要动力来源,决定了AUV的速度和角速度;净负浮力越大,AUV的螺旋回转直径越大,则下潜6 000 m深度的用时越短。
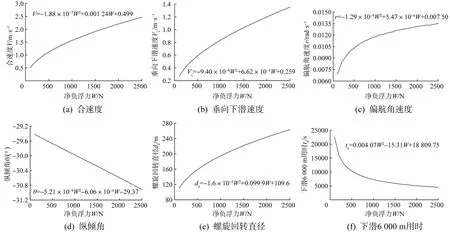
图12 净负浮力对大型深海AUV无动力螺旋下潜稳态参数的影响Fig.12 Influence of net negative buoyancy on unpowered spiral diving steady-state parameters of large deep-sea AUV
2)重心纵向位移变化。令0.0100m≤xg≤0.2000m,W=1 000 N,zg=0.20 m,δb=0°,δs=0°,δr=20°。通过仿真分析得到重心纵向位移对大型深海AUV无动力螺旋下潜稳态参数的影响,结果如图13所示。由图可以看出,在稳心高度不变的条件下,重心纵向位移主要影响AUV下潜过程的纵倾角;重心纵向位移越大,纵倾角越快,则垂向下潜速度越快,偏航角速度越大,下潜6 000 m深度的用时越短;螺旋回转直径随重心纵向位移的增加呈先增大后减小趋势。
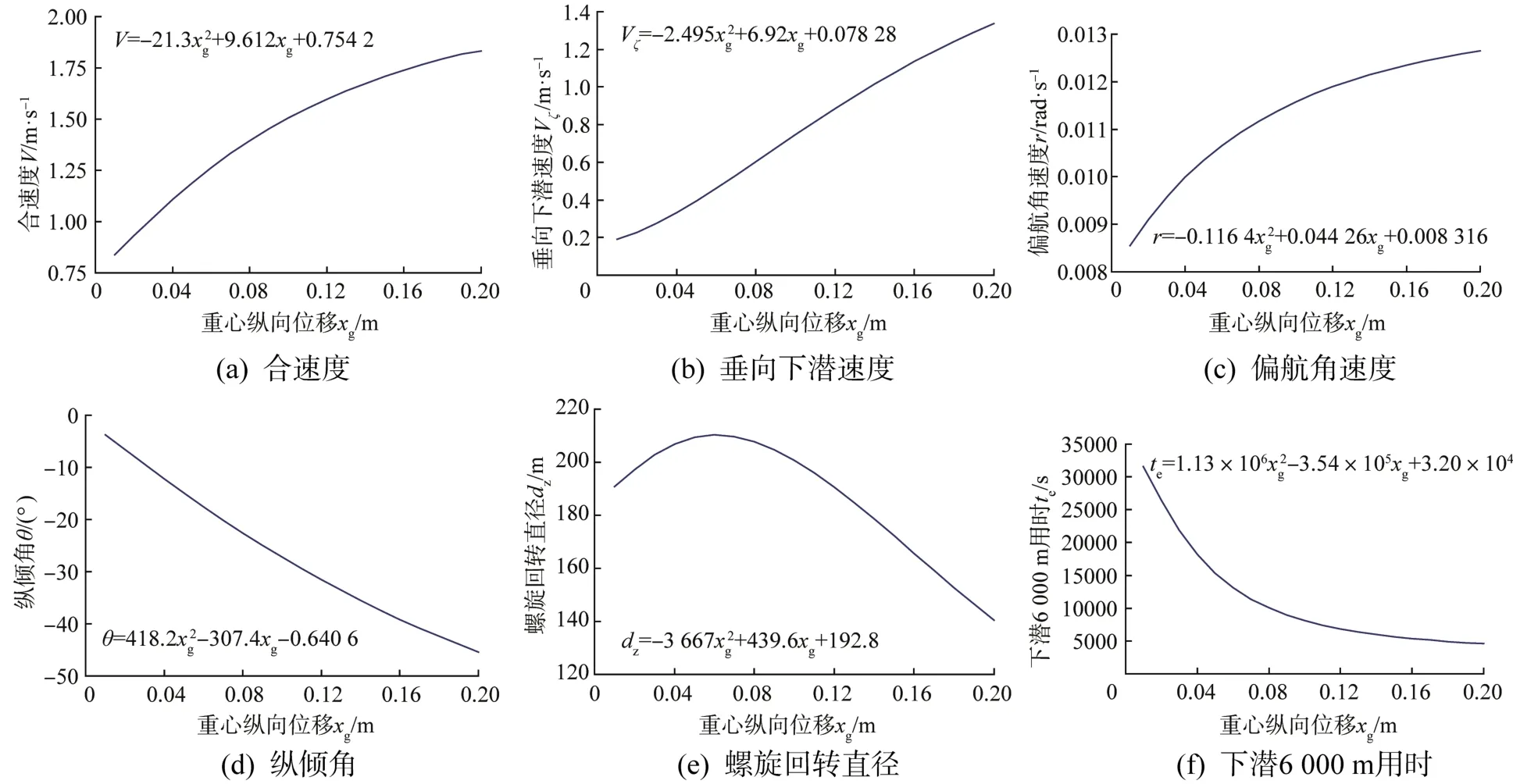
图13 重心纵向位移对大型深海AUV无动力螺旋下潜稳态的影响Fig.13 Influence of longitudinal displacement of gravity center on unpowered spiral diving steady-state parameters of large deep-seaAUV
3)稳心高度变化。令0.12 m≤zg≤0.32 m,W=1 000 N,xg=0.112 5 m,δb=0°,δs=0°,δr=20°,通过仿真分析得到稳心高度对大型深海AUV无动力螺旋下潜稳态参数的影响,结果如图14所示。由图可以看出,稳心高度也主要影响AUV的纵倾角,稳心高度越大,纵倾角越小,则垂向下潜速度越慢,偏航角速度越慢,螺旋回转直径越大,下潜6 000 m深度的用时越长。

图14 稳心高度对大型深海AUV无动力螺旋下潜稳态参数的影响Fig.14 Influence of metacentric height on unpowered spiral diving steady-state parameters of large deep-sea AUV
4 大型深海AUV缩比样机水池试验
4.1 缩比样机
为验证大型深海AUV无动力螺旋下潜动力学仿真结果的正确性,设计了1∶10的缩比样机并开展水池试验。如图15所示,大型深海AUV缩比样机的排水质量为21 kg,正浮力小于0.1 N;长度为1.6 m,宽度为0.2 m,高度为0.2 m,艇体回转直径为0.225 m;浮心位于水平面方向上距艏部端面593.7 mm,垂直方向上距艇体中间平面3.45 mm处;重心位于水平面方向上距艏部端面593.7 mm,垂直方向上距艇体中间平面-3.629 mm处。
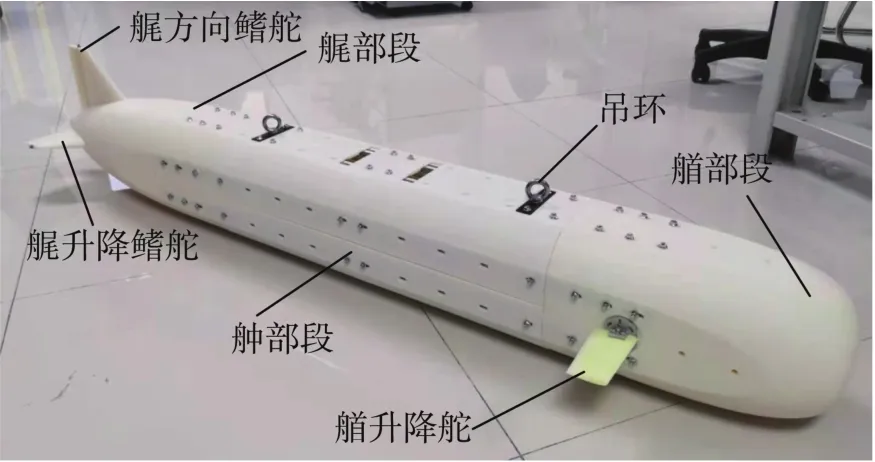
图15 大型深海AUV缩比样机Fig.15 Scaled-down prototype of large deep-sea AUV
如图15所示,大型深海AUV缩比样机的壳体为透水结构,结构件均采用3D打印,材料为光敏树脂;其电子舱为密封结构,两侧为铝合金密封法兰,舱体采用亚克力透明圆管,长度为0.60 m,内径为0.12 m,外径为0.13 m,舱内组件主要包括树莓派、姿态传感器、锂电池、电源管理板、旋钮防水开关和深度计等,用于获取缩比样机下潜过程中的姿态和深度信息,如图16所示。
4.2 水池试验
大型深海AUV缩比样机无动力螺旋下潜水池试验在中国科学院沈阳自动化研究所的试验水池内进行。试验水池的长度为90 m,宽度为25 m,深度为15 m,试验现场如图17所示。利用吊车将AUV缩比样机吊放至水面,牵引绳和安全绳与缩比样机顶部吊环连接,其长度均为14 m,将浮球与牵引绳连接后控制样机的最大下潜深度。充气橡皮艇上的操作人员负责脱钩和扶正调整缩比样机的初始状态,以防止缩比样机与池壁发生碰撞,从而威胁其安全。缩比样机脱钩释放后开始进行无动力螺旋下潜试验。

图17 大型深海AUV缩比样机水池试验现场Fig.17 Pool test site of scaled-down prototype of large deep-sea AUV
大型深海AUV缩比样机无动力螺旋下潜水池试验工况如表7所示,其中,艏、艉升降舵角均为0°,将不同净负浮力工况下选用的铅块依次固定在缩比样机前端底部距离浮心600,300,200和150 mm处。尽管该缩比样机在水平方向上保持重心位置不变,但随着净负浮力的增大,其稳心高度逐渐增大,因此4个试验工况下的重心纵向位移与稳心高度的比值逐渐减小。
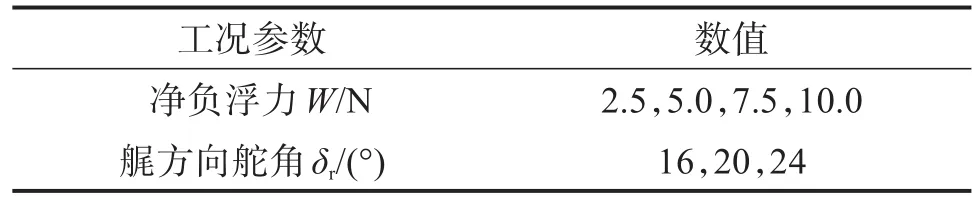
表7 大型深海AUV缩比样机的无动力螺旋下潜水池试验工况Table 7 Pool test conditions of scaled-down prototype of large deep-sea AUV unpowered spiral diving
图18所示为净负浮力W=7.5 N,艉方向舵角δr=24°时大型深海AUV缩比样机的无动力螺旋下潜运动过程。从图中可以看出,该缩比样机可实现逆时针螺旋下潜运动,符合设计预期,由此验证了无动力螺旋下潜时的静力配置方案的可行性。
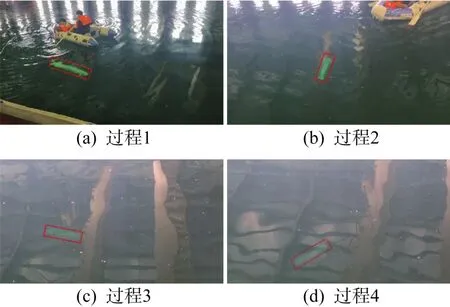
图18 大型深海AUV缩比样机无动力螺旋下潜过程(W=7.5 N,δr=24°)Fig.18 Unpowered spiral diving process of scaled-down prototype of large deep-seaAUV(W=7.5 N,δr=24°)
当艉方向舵角δr=20°时,不同净负浮力下大型深海AUV缩比样机的下潜深度、偏航角速度、纵倾角和艏向角随时间的变化规律如图19所示。
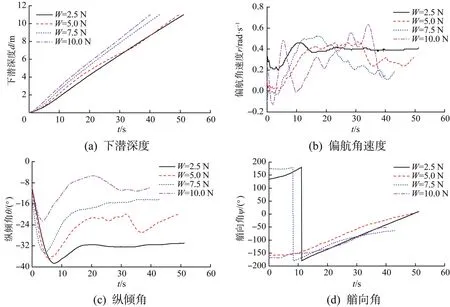
图19 不同净负浮力下大型深海AUV缩比样机无动力螺旋下潜状态参数随时间的变化规律(δr=20°)Fig.19 Variation law of unpowered spiral diving state parameters of large deep-sea AUV scaled-down prototype with time under different net negative buoyancy(δr=20°)
从图19中可以看出,随着净负浮力的增大,大型深海AUV缩比样机的下潜速度增快,下潜11 m深度的用时缩短,但艏向角的变化幅度较小。随着重心纵向位移与稳心高度比值的减小,该缩比样机的纵倾角减小,且达到稳态运动状态所需的时间延长。
综上所述,大型深海AUV缩比样机无动力螺旋下潜状态参数的变化规律与动力学仿真结果基本一致。但从净负浮力为5.0 N的工况可以看出,当牵引绳和安全绳位置不当时,该缩比样机螺旋下潜时存在一定的干扰。此外,由于水池条件有限,该缩比样机的最大下潜深度为13 m,部分状态参数未达到稳定值,后续将在更深的水域内开展试验,以验证大型深海AUV无动力螺旋下潜的稳定性。
5 结论
1)基于拉格朗日方程推导了大型深海AUV的动力学模型,并利用CFD软件对其直航试验、斜航试验、悬臂水池试验和平面运动机构试验进行了数值模拟,并采用最小二乘线性回归法对模拟结果进行拟合,获得了动力学模型所需的水动力系数。
2)利用MATLAB/Simulink和S函数建立了大型深海AUV的六自由度运动仿真模型,并分析了净负浮力、重心纵向位置和稳心高度对其无动力螺旋下潜稳态参数的影响,可得:①净负浮力作为大型深海AUV螺旋下潜时的主要动力来源,决定了AUV的速度和角速度;净负浮力和重心纵向位移与稳心高度的比值越大,AUV的垂向下潜速度越快,下潜6 000 m深度的用时越短。②由于大型深海AUV体量较大,其纵倾角主要由重心纵向位移与稳心高度的比值决定,压载质量对其重心位置和转动惯量的影响可以忽略。
3)通过对比给定推力条件下大型深海AUV直航速度的动力学仿真结果和CFD模拟结果发现,两者吻合较好,验证了所建动力学模型的有效性。最后,通过设计了1∶10缩比样机并开展水池试验,进一步验证了动力学仿真结果的正确性。研究结果可为大型AUV无动力螺旋下潜时静力配置的工程设计和应用提供参考。