柔性充气空间飞行器姿态控制系统设计
2022-07-05赵春明焦胜海王晓飞姚跃民黄朝东
赵春明,焦胜海,王晓飞,姚跃民,黄朝东
(北京航天长征飞行器研究所,北京 100076)
0 引言
空间充气展开结构是一种采用轻质高强度柔性薄膜材料,发射时为折叠状态、到达预定轨道充气展开的新型空间结构。空间充气展开结构占用空间小、质量轻、成本低,在航天器上的使用越来越广泛,具有很大的发展潜力。典型应用如导弹充气诱饵、充气太空舱、充气式增阻离轨装置、充气天线、充气太阳能电池阵、空间充气遮光罩、卫星充气重力梯度杆、气球卫星等。
作为空间飞行器的承力或功能结构的新形式,柔性充气结构的发展和应用涉及到柔性气囊材料技术、充气结构折叠和展开技术、柔性充气结构数值模拟及仿真技术,以及柔性充气结构的动力学建模与控制等关键技术。文献[8-9]对充气结构的展开过程进行了数值仿真分析,得到了气囊展开过程的规律及影响因素。文献[10]主要针对航天器充气增阻球离轨应用,进行极薄充气增阻球的形状稳定性分析及验证,并提出了若干种薄膜球体形状稳定性增强方案。关于充气柔性飞行器控制的文献较少,文献[11]针对气球卫星进行研究,对气球卫星进行总体设计,并就展开状态进行了模态分析,仅简单描述采用重力梯度杆和磁力矩器进行姿态控制。文献[12]针对球锥外形的柔性充气囊体结构进行静力和动力学响应分析,并研究了自由飞行状态下控制力作用引起的充气囊体姿态动力学特性,发现控制力产生的弹性变形对充气囊体的姿态动力学影响较大,姿态分析中的充气囊体不能等效为刚体。
充气结构虽然采用了增强、硬化等技术提高结构刚度,但与传统刚性结构相比,充气结构不可避免地会存在低频柔性振动,传统刚性飞行器的控制算法可能不适用于柔性充气结构,真正实现带有柔性充气结构的空间飞行器精确控制,需要关注刚柔耦合问题。关于柔性充气结构飞行器的姿态控制文献较少,更多的是关于以太阳帆板为代表的带有挠性附件飞行器的控制研究。文献[13]提出采用自适应鲁棒输出反馈控制器实现高精度姿态控制,并用线性二次型调节器抑制弹性振动。文献[14]提出采用输入成型技术、自适应扰动观测器,以及多变量有限时间控制器相结合的控制策略,达到弹性振动抑制、高精度姿态跟踪的目的。文献[15]通过机动路径规划、模态估计及动力学补偿等技术,实现挠性飞行器姿态控制性能和对扰动的持续抑制。文献[16-17]采用滑模控制进行刚柔耦合姿态控制并抑制弹性振动。文献[18]引入角加速度测量并基于动态面方法进行了姿态控制设计。上述文献中的方法对柔性充气飞行器的研究有一定参考价值,但工程实现相对复杂。
本文以文献[7,11]所示中心刚体加充气囊体结构的具备大角度机动柔性充气空间飞行器为应用对象,对其展开后的姿态控制问题进行研究。充气飞行器采用捷联惯性测量组合(简称惯组)确定飞行姿态,以姿态控制发动机作为执行机构,惯组和执行机构安装到中心刚体上。通过基于自抗扰控制理论的姿态控制系统设计方法,实现了充气空间飞行器刚柔耦合影响下的高精度姿态控制。
1 刚柔耦合动力学建模
建立精确的耦合动力学模型是进行控制的基础,基于混合坐标系法和拉格朗日法,可得到如下运动学和动力学模型。
1) 运动学模型

(1)

2) 动力学模型


(2)
式中:为整个飞行器的惯性张量矩阵,

(3)


(4)
、、分别为滚转柔性振动对刚体滚转、偏航、俯仰运动的耦合系数,为振动模态阶数,、、分别为偏航柔性振动对刚体偏航、滚转、俯仰运动的耦合系数,、、分别为俯仰柔性振动对刚体俯仰、滚转、偏航运动的耦合系数;为充气囊体的振动模态广义坐标矢量,

(5)
、、分别为滚转、偏航、俯仰三通道振动模态坐标;为控制力矩,

(6)
、、分别为滚转、偏航、俯仰三通道控制力矩;为外部干扰力矩,

(7)

=diag(1,…,,1,…,,1,…,)
(8)

(9)

从(2)式可以看出,柔性飞行器的姿态动力学方程和结构动力学方程是相互耦合的,姿态角加速度会激发柔性囊体振动,而柔性振动又会通过模态角加速度影响飞行器姿态。
2 姿态控制设计
2.1 PID控制


图1 基于PID控制的姿态控制系统方案Fig.1 Attitude control system scheme based on PID control

(10)
式中:(,,)为滚转、偏航和俯仰通道连续控制量;(f,f,f)为惯组输出滤波处理后的角速度;(,,,)为误差四元数;(p,i,d)为滚转控制参数,(p,i,d)为偏航控制参数,(p,i,d)为俯仰控制参数,相关控制参数通过相平面法得到。
2.2 自抗扰控制
自抗扰控制方法是在PID控制基础上发展起来的一种新型非线性控制方法,其核心是把所有的非线性、时变、大时滞等影响都当做干扰来处理,通过扩张状态观测器对干扰进行估计,并在控制器中进行补偿,不依赖于被控对象的精确模型,抗干扰能力强,可用于多种线性或非线性系统。目前,线性自抗扰利用带宽概念确定控制参数,使得整个系统易于调试和实际应用,也便于利用频域方法进行稳定性分析,成为发展和应用最快的方向。本文采用线性自抗扰理论进行控制器设计,将充气囊体的柔性振动及其他干扰通过2阶线性扩张状态观测器进行估计并实时补偿,从而实现高精度控制。
由(2)式可得

(11)


(12)
式中:表示输出向量。
设计2阶状态观测器:
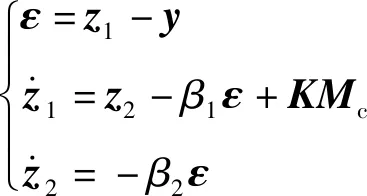
(13)
式中:为的估计值;为的估计值;、为观测器参数。


(14)

根据上述分析,设计控制方案如图2所示,图2中,为观测器输出的补偿量,为控制参数。

图2 基于自抗扰控制的姿控系统方案Fig.2 Attitude control system scheme based on active disturbance rejection control
从而得到三通道控制方程如下:

(15)

(16)

(17)
式中:(,,)为滚转、偏航和俯仰三通道连续控制量;(,,)为滚转、偏航和俯仰三通道控制参数;(0,0,0)分别为滚转、偏航、俯仰三通道状态观测器参数;1,、1,、1,、2,、2,、2,分别为滚转、偏航、俯仰三通道状态观测器状态量的当前拍值;1,-1、1,-1、1,-1、2,-1、2,-1、2,-1分别为滚转、偏航、俯仰三通道状态观测器状态量的上一拍值;c为控制计算周期。
对于(15)式~(17)式,在频域上基于幅值和相位稳定裕度进行控制参数整定,从而可以保证控制回路的稳定性。
2.3 姿态机动路径规划


图3 姿态机动路径规划示意图Fig.3 Schematic diagram of attitude maneuver path planning

(18)
具体调姿实现时的当前时刻旋转角度指令通过(19)式得到:

(19)
式中:

(20)
2.4 PWPF调制
对于采用姿态控制发动机进行反作用控制的空间飞行器,PWPF拥有接近线性的占空比,能够降低燃料消耗,具有很大优势。如图4所示,PWPF调制器由1阶惯性环节和施密特触发器构成,具体通过(21)式将连续控制指令离散化为发动机的开关指令。图4中,、分别为调制器的输入和输出,、为惯性环节参数,()为惯性环节输出,为输出幅值,、为触发器开关门限。
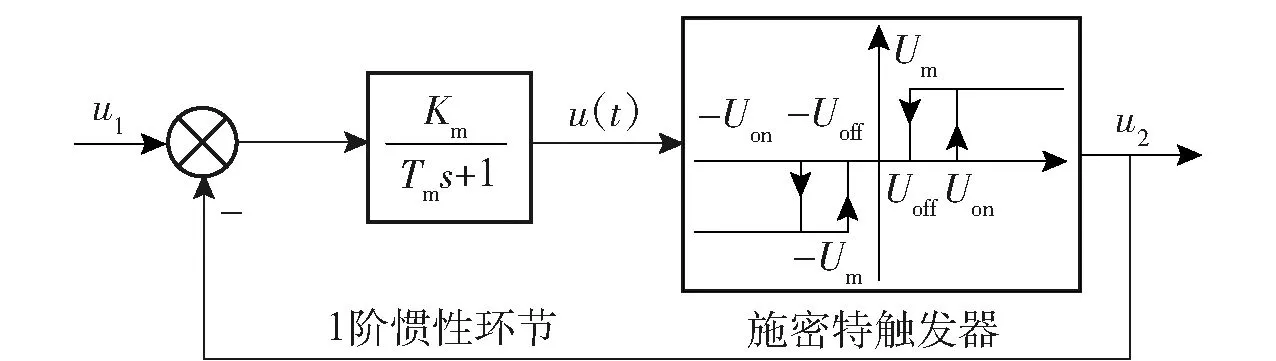
图4 PWPF调制器Fig.4 PWPF modulator

(21)

(22)
式中:为调制周期;1,、2,分别为PWPF的输入和输出,=,,;,-1为,的前一拍值;2,-1为2,的前一拍值。
2.5 滤波处理
状态观测器带宽有限,通常只能补偿中低频干扰,此处滤波器的引入主要用来滤除姿控系统可能存在的高频噪声及干扰,适当降低刚柔耦合影响,提高系统抗干扰能力。本文采用工程上常用的2阶低通滤波器,具体实现如下:

(23)
式中:、、、、为滤波器系数;_1和_2表示角速度(=、、)的上拍值和上上拍值,f-1和f-2表示f的上拍值和上上拍值。
3 仿真验证
为校验本文姿态控制设计的有效性,搭建姿态控制系统仿真模型,进行姿态控制系统数学仿真验证,PWPF调制周期10 ms。


(24)
仿真中设计的控制参数如表1~表3所示,按时间设置表4所示的姿态机动序列,且在全程考虑(25)式所示的空间干扰力矩。
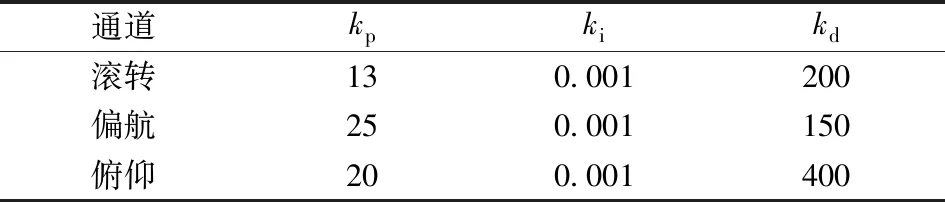
表1 PID控制器参数Tab.1 Parameters of PID controller

表2 自抗扰控制器参数Tab.2 Parameters of ADRC controller

表3 PWPF调制器参数Tab.3 Parameters of PWPF controller

表4 姿态机动序列Tab.4 Attitude maneuver sequence

(25)


图5 俯仰角响应对比Fig.5 Responses of PID and ADRC controllers to pitch angle

图6 偏航角响应对比Fig.6 Responses of PID and ADRC controllers to yaw angle
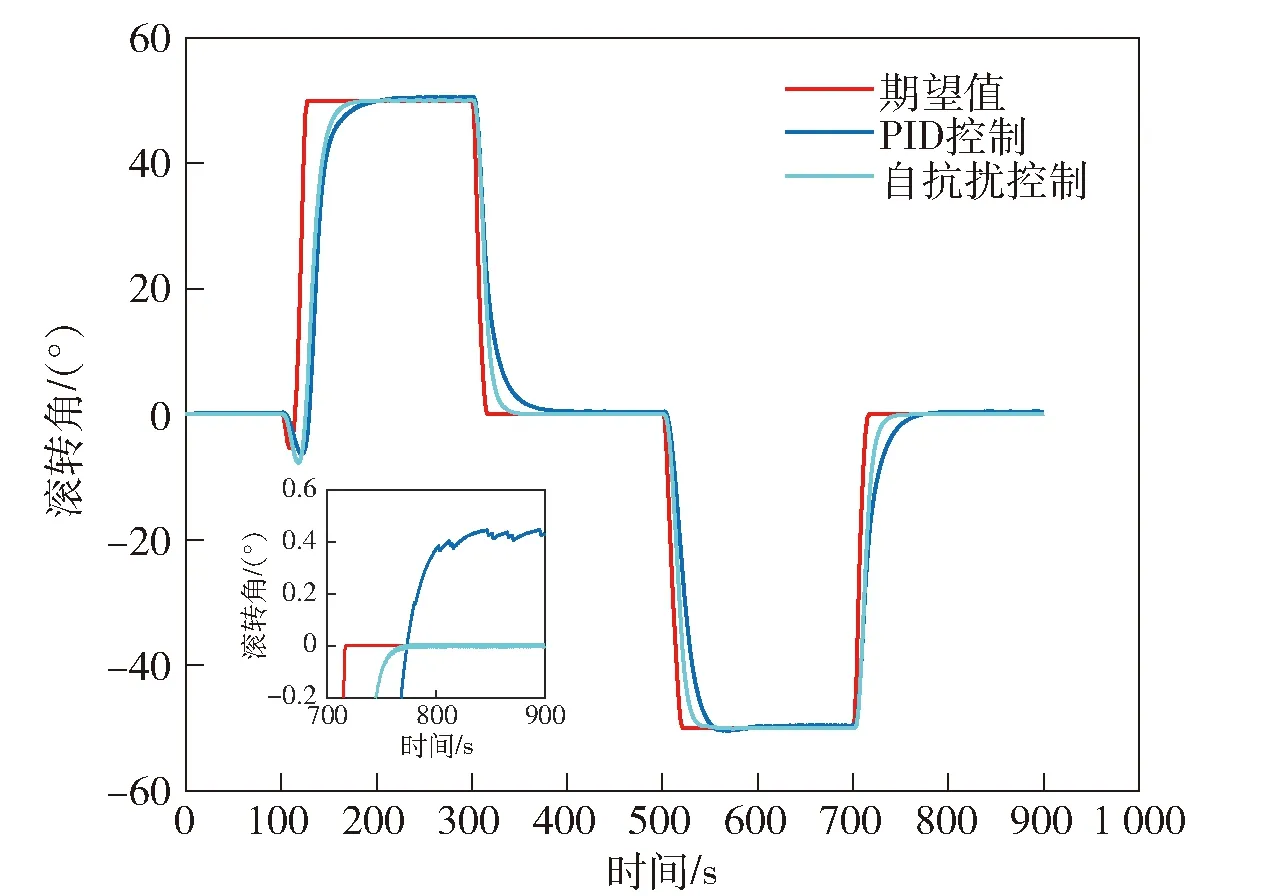
图7 滚转角响应对比Fig.7 Responses of PID and ADRC controllers to roll angle

图8 角速度响应(PID)Fig.8 Response of angular velocity in PID

图9 滚转通道振动模态变化(PID)Fig.9 Flexible modes of roll channel in PID

图10 偏航通道振动模态变化(PID)Fig.10 Flexible modes of yaw channel in PID

图11 俯仰通道振动模态变化(PID)Fig.11 Flexible modes of pitch channel in PID

图12 角速度响应(自抗扰控制)Fig.12 Response of angular velocity in ADRC

图13 滚转通道振动模态变化(自抗扰控制)Fig.13 Flexible modes of roll channel in ADRC

图14 偏航通道振动模态变化(自抗扰控制)Fig.14 Flexible modes of yaw channel in ADRC

图15 俯仰通道振动模态变化(自抗扰控制)Fig.15 Flexible modes of pitch channel in ADRC

图16 燃料消耗对比Fig.16 Fuel consumption
4 结论
本文建立了充气空间飞行器刚柔耦合动力学模型,基于自抗扰控制理论,综合采用自抗扰控制、姿态机动路径规划、PWPF调制、滤波处理等控制策略进行刚柔耦合抑制,并进行了姿控系统仿真验证及与传统PID控制的对比。得出主要结论如下:
1) 本文设计的柔性充气空间飞行器姿态控制系统,能够有效抑制充气囊体的柔性振动,可在节省燃料消耗的同时实现高精度姿态控制。
2) 与传统PID控制相比,本文所用设计方法在刚柔耦合抑制、干扰抑制方面有更好的鲁棒性,精度更高。
