直流微电网不同荷电状态多储能系统分布式控制
2022-07-04马海宁王鲁杨仇成乔露吉铭成
马海宁,王鲁杨,仇成,乔露,吉铭成
(1.上海电力大学电气工程学院,上海市 200090;2. 国网上海市电力公司经济技术研究院, 上海市 200233)
0 引言
直流微电网是由分布式电源(distributed generators,DGs)、储能系统(energy storage system,ESS)、分布式负荷等组成的一种“即插即用”的小型发配电单元,具有并网和离网2 种工作模式[1-2]。当直流微电网处于离网模式时,由于没有大电网维持系统稳定运行及母线电压稳定,需要储能系统进行协调控制[3-9]。 储能系统通常由多个分布式储能单元(distributed energy storage units ,DESUs)通过双向DC-DC 变换器[6]并联在直流母线上,而DESUs 如果持续工作在不均衡的充、放电条件下会产生过充或过放的问题,导致电池的寿命缩短或出现提前退出的情况[10-12],降低直流微电网的稳定性,故各储能单元荷电状态(state of charge ,SOC)需要达到均衡状态。 在直流微电网中常采用I-U下垂控制对能量进行分配管理[13-16],而传统下垂控制无法解决母线电压偏离参考值及线路阻抗不等造成的电流分配精度低、SOC 无法均衡等问题[17],所以需要对传统下垂控制进行多方面改进,国内外学者提出了很多方案。
文献[18-19]提出一种以幂函数SOCn自适应调节“虚拟阻抗”实现SOC 均衡,虽然可以有效实现SOC 均衡,但没有考虑造成的母线电压跌落。 文献[20]提出基于e 指数自适应调整“虚拟阻抗”的下垂控制,减小了母线电压跌落,但同样无法消除由线路阻抗造成的影响。 文献[21]提出基于线路阻抗主动测量的改进下垂控制,将线路阻抗测量值补偿下垂系数,但很难解决线路阻抗发生变化造成的影响;文献[22]提出了直流微电网单母线分散式输出约束控制算法,不仅能保证直流母线电压收敛,还能保证有限的瞬态跟踪误差,但该算法需要每个变换器能够访问直流母线电压。 文献[23]分别提出了利用变换器平均输出电流和平均输出电压设计的分布式二次控制,通过电压平均值控制解决母线电压跌落问题,但没有考虑平均值的计算方法。
为避免储能系统的过充过放、实现精确的能量分配以及维持直流微电网的稳定运行,本文针对离网模式下的直流微电网,提出SOC 均衡控制策略实现各储能单元SOC 均衡,并提出二次控制利用积分控制器生成唯一电压补偿量消除不匹配线路阻抗的影响,同时实现母线电压恢复。 为在实现目标的基础上减轻通信压力,基于一致性算法设计分布式动态平均值算法控制器,避免依赖于中央控制器,提高系统稳定性和“即插即用”的效果。
1 直流微电网典型结构及传统下垂控制分析
图1 为直流微电网的典型结构,一般由光伏电池、储能系统、交/直流负载等组成。 当直流微电网独立运行于离网模式时,光伏、风电等新能源为实现能源最大利用效果, 通常采用最大功率点跟踪(maximum power point tracking,MPPT)的方式运行,可以将其看作为电流源。 而直流微电网中ESS 在充放电过程中维持系统稳定运行,调节直流母线电压。
直流微电网中通常采用I-U下垂控制对各储能单元进行能量分配管理。 传统下垂控制表达式为:

式中:Ii为变换器i的输出电流;Uref为母线参考电压;kd_i为变换器i的下垂系数;U*i为变换器i的输出电压参考值。
SOC 代表当前储能单元的剩余电量,可定义SOC 为:
式中:si、si0分别为第i个DESU 的荷电状态和初始荷电状态;CNi为第i个DESU 容量。
在系统运行时,通常有多组DESUs 通过双向DC-DC 变换器连接至直流母线上。 传统下垂控制下,以2 个DESUs 并联运行为例分析,模型如图2所示。
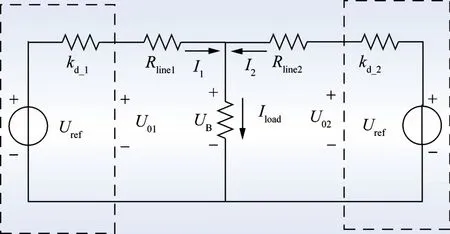
图2 双储能单元并联电路模型Fig.2 Parallel circuit model of double DESUs
图2 中:Rlinei(i=1,2)为各变换器输出等效线路阻抗,UB为直流母线电压,U0i为变换器i输出电压,Iload为负载电流。 假设系统中DC-DC 变换器为理想变换器,DESUs 输出电压为电压参考值。
变换器输出电流比值与各储能单元SOC 导数的比值有如下关系:

式中:s′1、s′2分别为s1和s2的导数。
因此在传统下垂控制中既无法解决由线路阻抗不等导致的变换器输出电流分配不精确,也会造成各DESUs 的SOC 不均衡。
2 下垂控制的改进策略
2.1 改进的SOC 均衡控制策略
在传统下垂控制中,固定的“虚拟阻抗”只能使各储能单元按比例分配输出电流,但由于初始荷电状态不同,如果储能单元以相同速率进行充、放电,可能出现个别储能单元由于过充或过放导致提前退出工作的情况,很大程度降低其利用率。 因此为实现各储能单元SOC均衡,应在放电时令SOC 较大的DESU 输出更大的电流,提升放电速度,意味着采用更小的下垂系数,而SOC较小的DESU 应该输出更小的电流,减缓放电的速度,故应该采用更大的下垂系数。 DESUs 充电时的控制策略应与放电时相反。 故本文提出改进的基于e 指数自适应调整下垂系数方法,下垂系数表达式为:
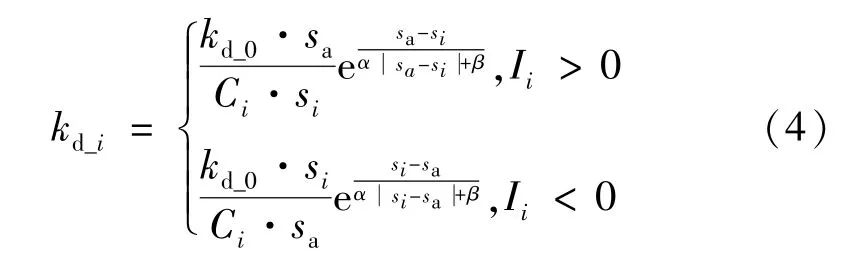
式中:kd_0代表DESUi的初始下垂系数;sa为各储能单元的SOC 平均值;Ci为第i组储能单元的容量;β为调整因子;α为加速因子,通过放大sa与si之间的差距,实时改变SOC 均衡速度,使SOC 差值逐渐减小时依旧保持较快的均衡速度。Ii >0 时,储能单元进行放电,Ii<0 时,储能单元进行充电。 随着各储能单元充放电的进行,下垂系数逐渐收敛为初始下垂系数。
当两个DESUs 进行放电时,联立式(1)、(2)、(4)可得:
故可以得到两个DESUs 的SOC 差值为:
式中:s10、s20分别为2 个储能单元的初始SOC;U*为变换器输出电压参考值。
对其差值式(6)求导得:
按泰勒级数展开式得:

从式(8)可以看出:当s1>s2时,两储能单元SOC 差值的导数小于0,故说明两储能单元的SOC之间的差值逐渐减小最终达到SOC 均衡的状态。 证明本文提出SOC 均衡控制策略有效,可以实现多储能单元间的SOC 均衡,避免出现储能单元的过充或过放的情况。
2.2 改进的分布式二次控制策略
为解决线路阻抗不匹配造成的影响以及“虚拟阻抗”造成的母线电压偏差问题,通常需要两个控制回路定义电压补偿项,即变换器之间共享的信息至少包含两个参数。 为减轻通信压力,本文设计同时包含变换器输出电压与输出电流分配信息的转移因子λ,通过积分控制器生成唯一的母线电压参考值补偿量。 与其他需传输多组数据的方法相比,通过传输更少的数据进而同时实现以上两个目标。 并且对于受环境等因素而造成的线路阻抗发生变化的问题,该策略依旧可以实现目标。 第i个DESU 的转移因子λi定义为:
式中:kd_0i为变换器i初始下垂系数;Iref_i为变换器i输出电流参考值,εi为中间变量,不具有物理意义;μ为一个取值为(0,1)的系数。
为避免在计算电压补偿项时分母为0,故本文取μ=0.5。 通过低带宽通信网络的链接,相邻变换器间传输λi信息,并各自计算电压补偿项:
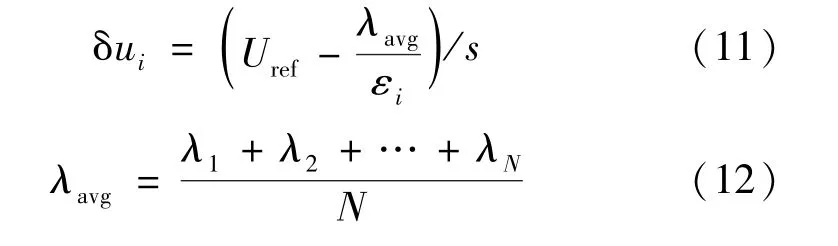
式中:λavg为转移因子λi的平均值;s为拉高拉斯算子;N为系统中并联DESUs 的数量。
具体二次控制框图如图3 所示。
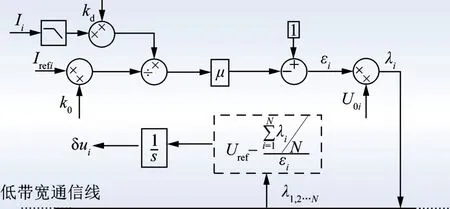
图3 二次控制策略框图Fig.3 Block diagram of secondary control strategy
通过将电压补偿量叠加到直流母线电压参考值上,可以得到:
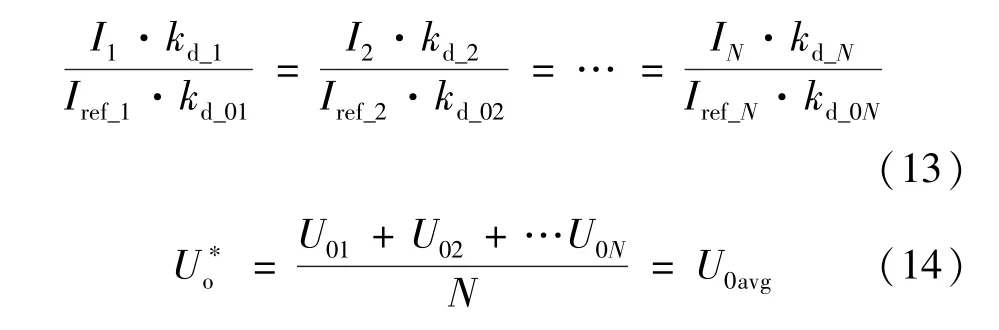
式中:U0avg为各变换器输出电压的平均值。
通过改变直流母线电压参考值,从而对变换器输出电流进行调节。 由式(13)可以看出,在实际线路阻抗未知情况下,电压补偿量使输出电流可以按“虚拟阻抗”的倒数成比例分配,此外由式(14)可以看出,各变换器输出电压的平均值恢复为电压参考值,以补偿母线电压的跌落。 该控制策略仅通过一个二次控制回路和一个积分控制器即可计算出下垂控制中所需电压补偿量,故下垂控制公式改写为:

2.3 分布式动态平均值算法
为获得上述控制中所需要的平均值信息并减轻系统通信压力,基于一致性算法提出一种计算平均值的分布式控制器。 系统中每个储能变换器作为独立的个体,利用低带宽通信使每个变换器仅与相邻变换器交换状态信息并动态收敛获得所需平均值数据,而不需要中央控制器的参与,降低了对通信的依赖程度,且更易实现扩容。 以4 个DESUs 并联为例,通信网络如图4 所示。
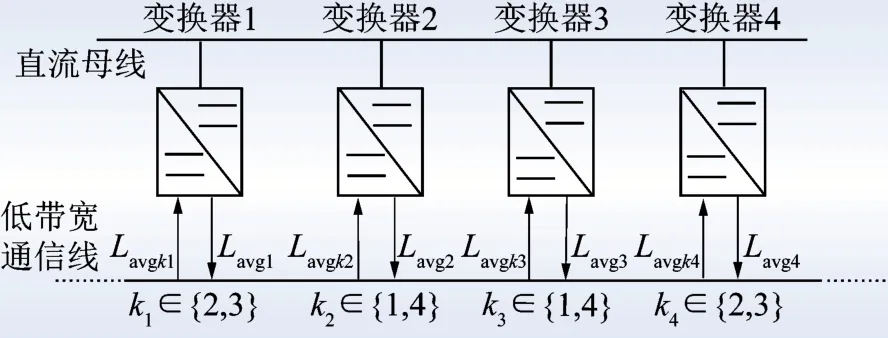
图4 储能系统通信结构图Fig.4 Communication topology of DESUs
在如图4 的网络中,ki代表本地变换器分别与相邻变换器建立通信联系。sa和λavg均可由式(16)获得。
数字化时代已然到来,ABB凭借丰富的行业经验及专业的解决方案,引领工业领域最新的发展趋势,倡导未来跨平台、跨产品、跨系统的理念。流程构建实时进行,生产极其灵活,从订单到交付整个价值链全程实现自动化,生产可进行远程监控且产品的整个制造及配送过程可全程追溯,ABB为我们描绘出未来智能工厂的样子,并正在将这种未来愿景逐步实现。ABB将与众多伙伴携手同心,共创一个数字化的未来!
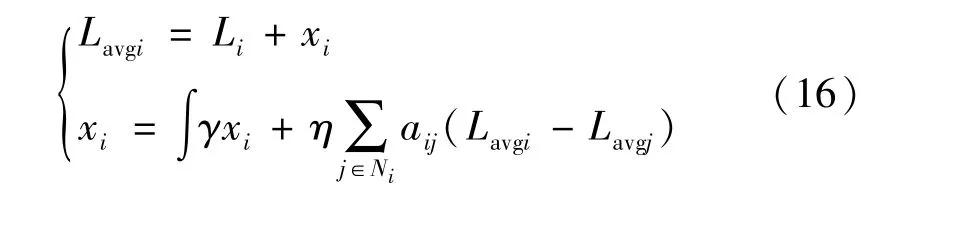
式中:i、j代表网络中节点,i、j=1,2,…,N;aij代表节点之间的通信状态,当aij=1 时代表两节点之间建立通信联系,aij=0 时代表两节点之间无通信联系;Li=[si,λi]代表i节点的本地测量数据;Lavgi= [sai,λavgi]代表i节点计算得到的平均值数据;xi=[xi1,xi2]为累计误差量,其中xi1、xi2分别为计算SOC 平均值和λi平均值的累计误差量,随着各储能单元充放电的进行,xi以积分的形式不断更新其自身状态,直至收敛为0,最终得到全局平均值信息Lavgi;γ、η为比例因子,选择更大的比例因子会提高控制性能,但会使该控制对测量误差、干扰更加敏感,因此在设定γ、η时,应在控制性能和控制的鲁棒性之间进行权衡。 改进下垂控制框图如图5 所示。
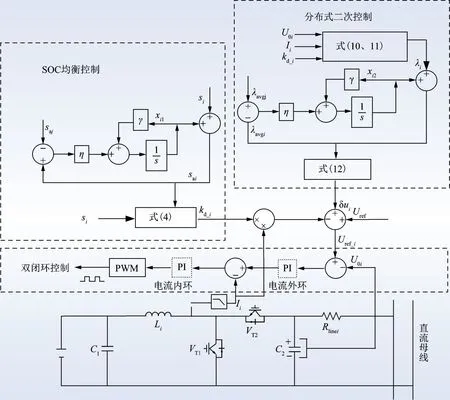
图5 改进下垂控制策略控制框图Fig.5 Block diagram of improved droop control strategy
为验证所提算法的准确性与稳定性,基于MATLAB/Simulink 搭建了相应的仿真模型,仿真系统中包括4 个SOC 各不相同的DESUs 和恒功率负载,各储能单元初始SOC 分别为70%、67%、63%、60%。 在30 s 时结束放电。
图6 为放电过程中各储能单元输出SOC 平均值收敛结果。 可以看出,DESUs 输出各自平均值信息,逐渐收敛最终得到sa,并在停止放电后该数值保持稳定。
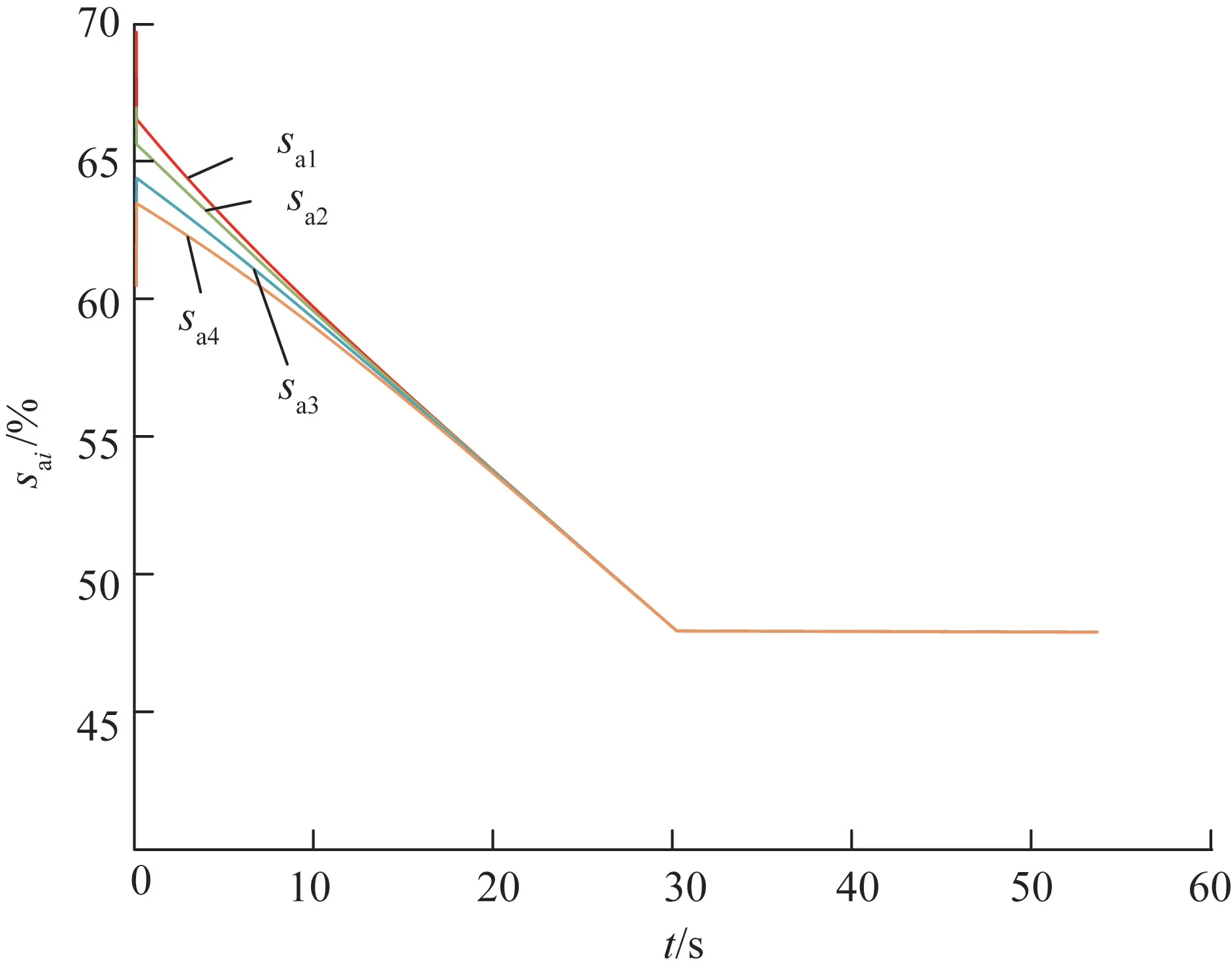
图6 储能单元SOC 平均值收敛效果Fig.6 Convergence effect of SOC average value of energy storage unit
在分布式平均值算法中每个节点只需与相邻通信节点间建立联系并传输数据,省略中央控制器从而减轻了通信压力,在DESUs 充放电的过程中逐渐收敛得到平均值信息。 该控制器在应对通信系统结构变化或光伏、负荷等状态发生变化等复杂的工况下依然可以精准收敛得到平均值,具有较强的稳定性和适应性。
3 仿真分析
针对直流微电网在离网状态下不同SOC 的多分布式储能系统,在各储能变换器连接至直流母线的线路阻抗不等的条件下,本文利用MATLAB/Simulink 搭建了主要由4 个分布式储能单元(DESU1至DESU4)、光伏电池与负荷构成的直流微电网仿真模型,其中光伏电池采用MPPT 模式运行,负载为恒功率负载,对SOC 均衡、输出电流分配及母线电压恢复进行了多工况下的验证。 具体参数如表1 所示。
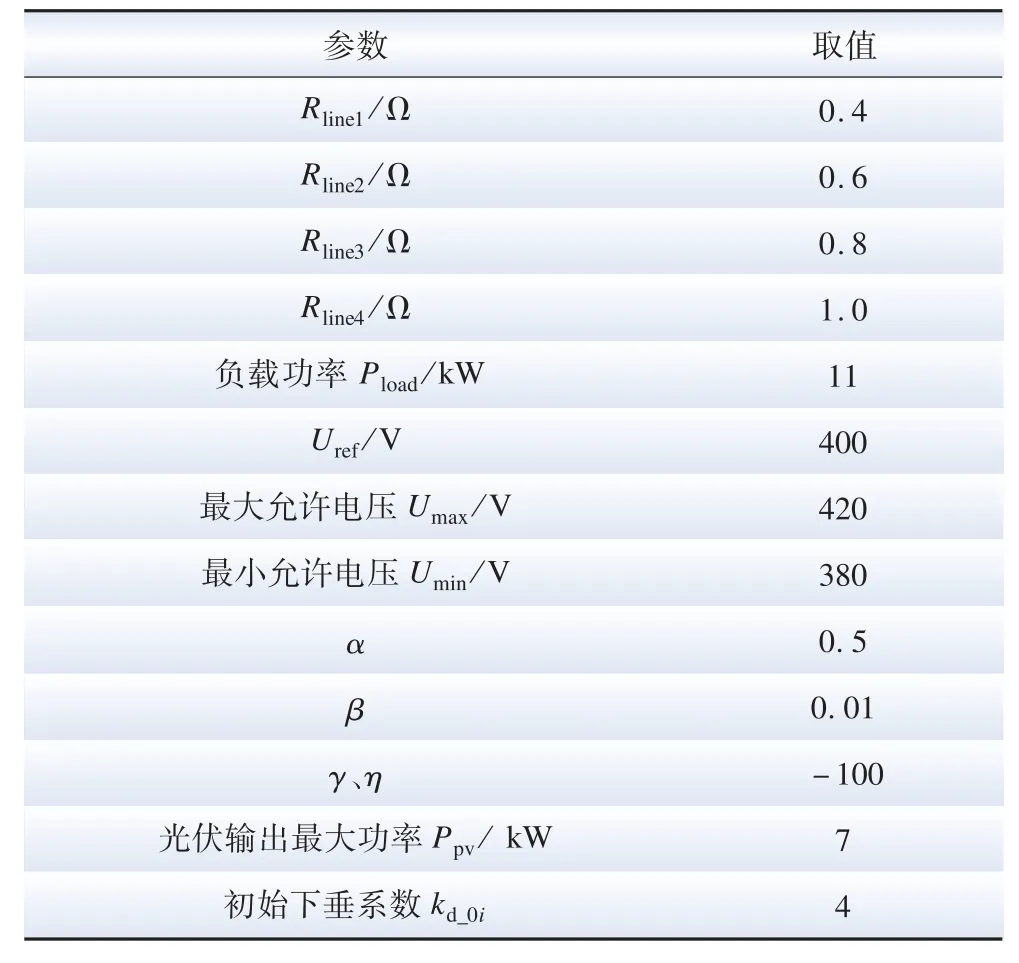
表1 仿真参数Table 1 Simulation parameters
3.1 仿真工况1:储能系统放电
本工况主要分阶段验证在各储能单元稳定放电时,所提SOC 均衡控制策略及分布式二次控制策略的有效性。 当光伏输出功率小于负载所需功率时,DESUs 处于放电的状态,在0 ~5 s 之间储能单元工作在传统下垂控制模式下,在第5 s 时分别引入文献[17]所提基于指数函数SOC 均衡控制策略以及本文改进的SOC 均衡控制策略。 在第10 s 时引入本文所提二次控制恢复母线电压消除不匹配线路阻抗的影响。 仿真结果如图7 所示。
由图7(a)、(b)可以看出传统下垂控制下,各DESUs以相同速度放电,SOC 差距较大,无变小趋势。 在第5 s 时引入SOC 均衡控制策略,各储能单元下垂系数发生变化,通过输出大小不同的电流值使各储能单元以不同的速度进行放电,SOC 较大的储能单元输出较大的电流值且SOC 下降的速度更快。 当采用文献[17]控制策略时,由于储能单元从文献[17]中的2 个增加至4 个,其SOC 均衡控制策略无法解决当出现2个及2 个以上储能单元SOC 低于平均值的情况,另外文献[17]没有解决不匹配线路阻抗的影响,故最终无法实现均衡。 当采用本文所提控制策略时,由于对SOC 均衡控制策略进行改进,并在第10 s 时,引入二次控制,使变换器输出电流精确分配且各储能单元SOC 实现均衡,直流母线电压UB由388.3 V快速提升至399.2 V。 约第55 s 时SOC 趋于一致,各变换器输出电流收敛为2.5 A。
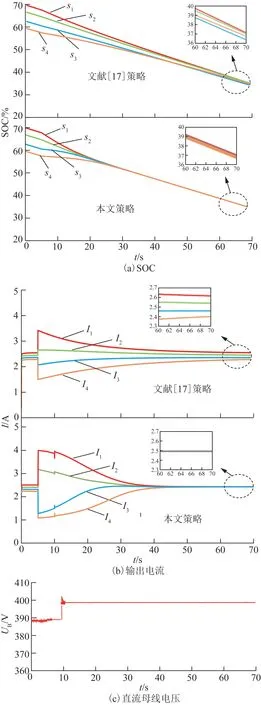
图7 DESUs 放电时仿真结果Fig.7 Simulation results of DESUs discharge
综上所述,通过在运行过程中引入本文所提控制策略,动态消除了线路阻抗的影响。 可以看出,在实现输出电流精确分配以及SOC 均衡两方面有较好的自适应性与稳定性,且可以同时实现母线电压的恢复,保持直流微电网的稳定运行。
3.2 仿真工况2:负荷波动
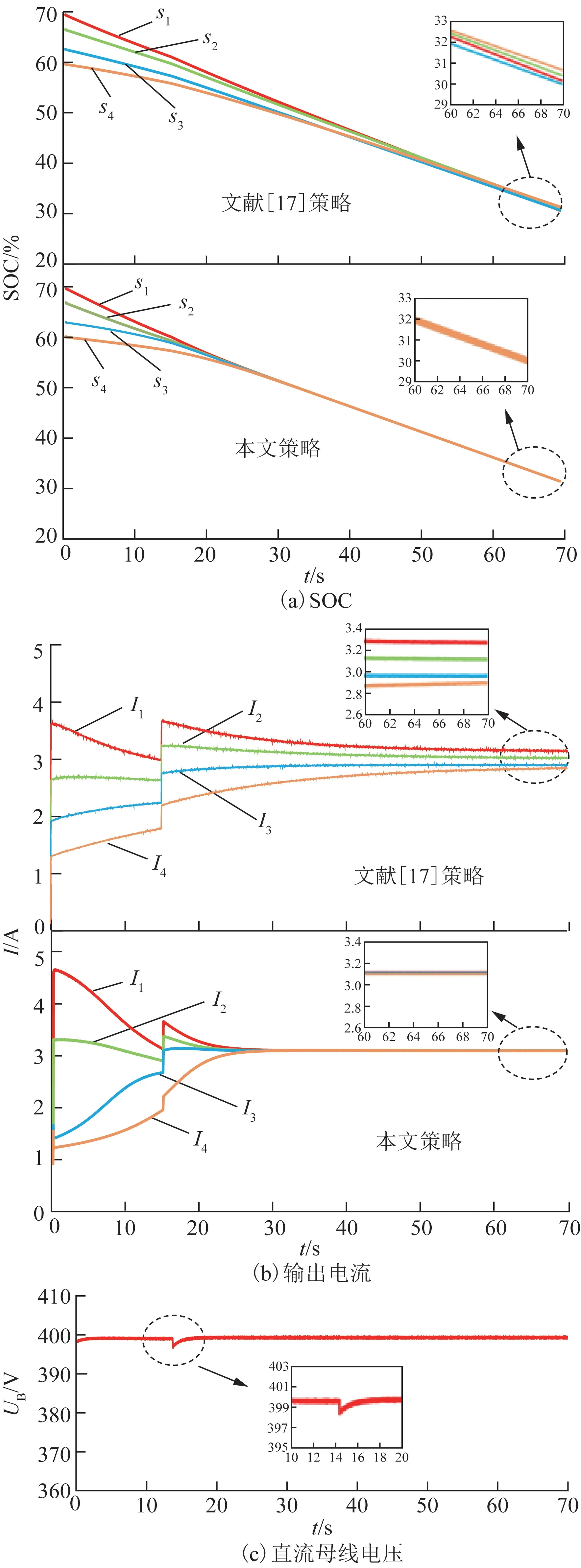
图8 负载突变时仿真结果Fig.8 Simulation results of sudden load change
3.3 仿真工况3:分布式电源输出功率波动
本工况主要验证当分布式电源输出功率发生波动时,文献[17]所提控制策略与本文所提控制策略能否实现均衡目标。 在0 ~15 s 之间Ppv=7 kW,在第15 s 时光照强度的改变使光伏电池输出功率发生变化,15 s 后Ppv=11.8 kW。 此工况下,各储能单元SOC 及变换器输出电流如图9 所示。
从图9(a)、(b)可以看出,在0 ~15 s 之间各储能单元SOC 的差值在减小且输出电流有均衡的趋势。 在15 s 时光伏电池输出功率发生变化,故15 s后储能系统经双向DC-DC 变换器由放电状态转换为充电状态,可以看出本文所提控制策略60 s 后可以实现变换器输出电流的精确分配以及SOC 均衡,最终变换器输出电流收敛为-0.5 A。 而文献[17]所提控制策略则在光伏输出功率波动后虽然储能系统能量流动方向发生转换,但充电过程中SOC 无明显变小趋势且输出电流也无法实现收敛。
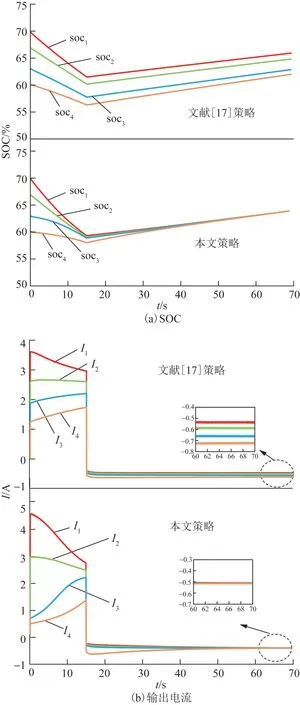
图9 分布式电源输出功率波动时仿真结果Fig.9 Simulation results of distributed generator when output power fluctuates
4 实验平台验证
利 用 RT-LAB 实 时 仿 真 机、 控 制 板TMS320F28335、上位机和示波器所组成的硬件在环实验平台搭建了直流微电网系统模型,如图10 所示。
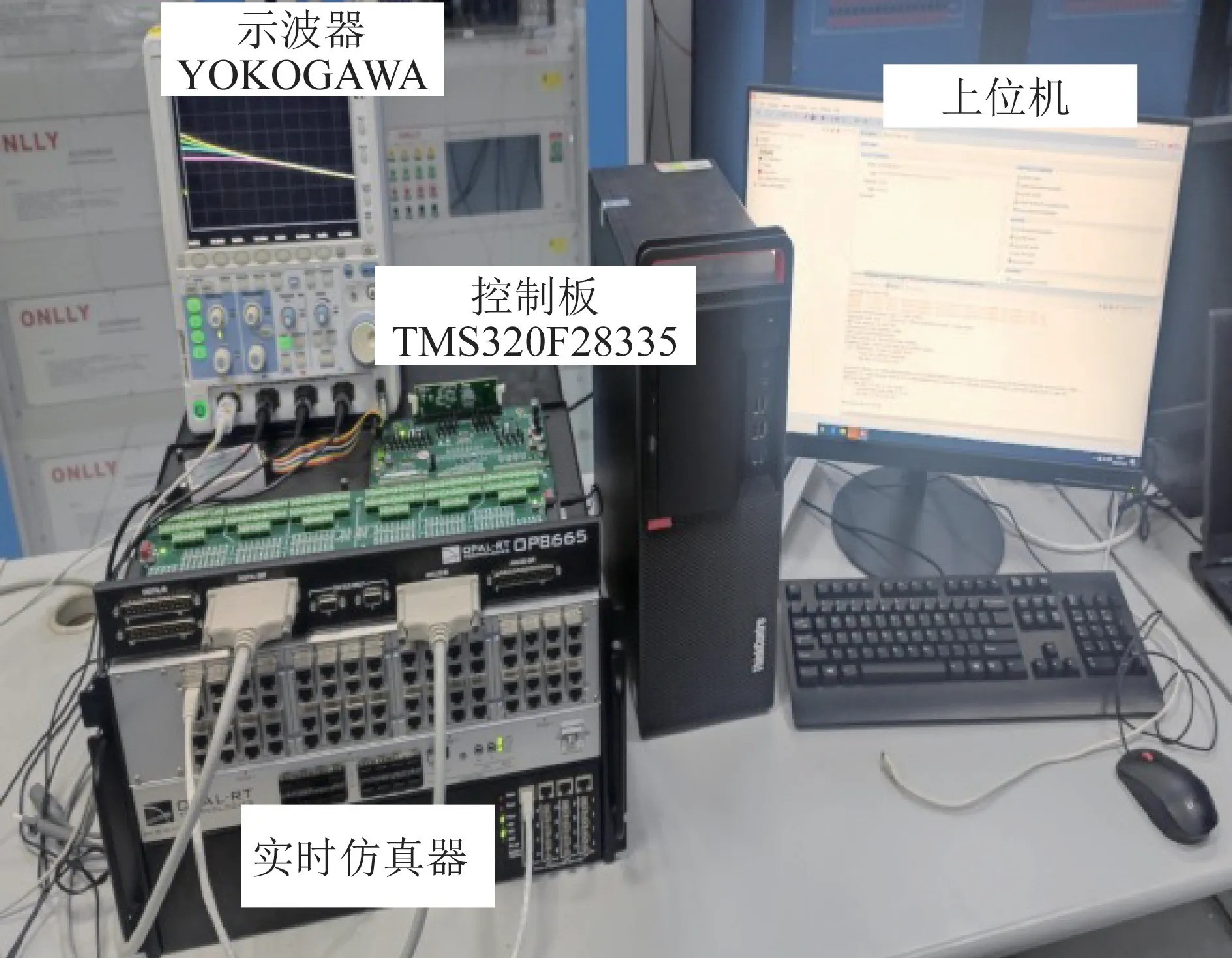
图10 基于RT-LAB 平台硬件在环实验Fig.10 Hardware in the loop experiment based on RT-LAB platform
为证明所提控制策略可以实现当线路阻抗发生变化后依旧达到均衡目标,实验中设置在第10 s 时线路阻抗Rline1由0.9 Ω 变为0.4 Ω,模拟当环境因素不同而造成的线路阻抗变化情况,各储能单元SOC分别设置为77%、72%、68%、62% 。 其余实验参数与仿真平台相同,实验波形如图11 所示。
由图11(a)、(b)可知,在第10 s 线路阻抗发生变化后,各变换器输出电流出现轻微波动,但50 s 后可以实现输出电流的精确分配以及SOC 均衡,各变换器输出电流收敛为2.5 A。 本文所提二次控制策略因线路阻抗的变化利用积分控制器对电压补偿量进行动态调整,由图11(c)可以看出,在线路阻抗变小使直流母线电压出现微小的提升后迅速稳定在399 V,实验结果与理论分析一致。

图11 基于RT-LAB 实验波形Fig.11 Experimental waveform based on RT-LAB
5 结论
为防止直流微电网在离网状态下储能单元过充、过放以及维持直流母线电压的稳定,本文提出改进的储能单元SOC 自适应下垂控制策略,使各储能单元SOC 快速稳定实现均衡。 并利用二次控制回路构造唯一转移因子生成电压参考值补偿量消除线路阻抗影响,同时能够实现直流母线电压恢复,很大程度减轻了通信的压力。 并利用低带宽通信提出分布式动态平均值算法,能够成功收敛得到全局平均值信息。基于MATLAB/simulink 仿真与RT-LAB 实验平台在不同工况下进行对比验证,结果表明相较于其他方法所提控制方法可以以更快的速度实现多储能单元间的SOC 均衡与输出电流精确分配并将直流母线电压恢复至合理范围内,验证了所提控制策略的有效性,且具备“即插即用”的性能。