基于磁流变液弹减振器的发动机减振控制研究
2022-07-04陈礼钭于海龙张釜诚
陈礼钭,于海龙,魏 慜,金 壮,张釜诚
(南京理工大学 发射动力学研究所,南京 210094)
车辆发动机工作时产生的振动会传递到车体,影响乘坐舒适性,干扰车载精密零部件工作,并且产生噪声。发动机悬置担负着减振降噪工作,一个理想的悬置在低频时应该大刚度大阻尼,在高频时应该小刚度小阻尼[1]。磁流变技术目前广泛、成熟的应用在离合器、阻尼器、军事等领域[2]。利用磁流变材料的减振器有阻尼和刚度连续可调的性能,需要控制策略自适应地调整力学性能。天棚控制策略可以根据设计好的控制规律及时调节减振器参数,算法较简单且容易实现。PID 算法的参数调整方便,有一定的控制精度。模糊控制的控制逻辑简洁有效,可以不必知道具体的控制模型,适用于较复杂的控制对象[3]。模糊PID 控制在一定程度上整合了模糊控制和PID 控制的优势,具有更好的稳定性和适应性。
Choi 等[4]设计了发动机电流变液悬置与单自由度的天棚阻尼控制器,在仿真系统中搭建了整车模型,通过仿真发现能有效减振,但是电流变液所需电流密度较高,抗剪切强度较低。程自力等[5]为磁流变液悬置引入了模糊控制理论,并在发动机启动工况与怠速工况进行了动力学仿真,认为模糊控制下的磁流变液悬置的隔振性能明显优于被动悬置。潘道远等[6]认为不同的车体传递力偏差下应该采用不同的控制策略,设计了磁流变半主动悬置模糊—PID切换控制系统,通过仿真分析和经验确定了两种控制策略之间的切换值,怠速工况和行驶工况的仿真结果表明模糊—PID 切换控制策略精度高、稳定性好,但是两者都未给出主要频域内的仿真结果。辛付龙[7]设计了普通橡胶与磁流变弹性体并联的半主动悬置元件结构,通过普通橡胶支承、限位,通过磁流变弹性体获得移频性能,但是普通橡胶用于承重致使刚度过大,制约了磁流变弹性体的变刚度特性。李锐等[8]提出用磁流变阻尼器和磁流变弹性体构成磁流变并联悬置系统,并设计了垂直隔振的模糊自适应控制器,仿真和试验表明可以提高车辆的耐久性和乘坐舒适性,但是未考虑其他控制策略在悬置结构中是否有更好的适用性。
本文提出一种磁流变阻尼隔振单元和磁流变弹性体隔振单元并联的磁流变液弹减振器结构,刚度和阻尼可调,作为某型车辆发动机的悬置元件。建立发动机减振控制动力学模型与天棚控制动力学模型,引入PID 控制、模糊控制、模糊PID 控制和天棚控制作为磁流变液弹减振器的控制算法,运用MATLAB/SIMULINK进行动力学仿真,给出频域的计算结果,对比四种控制策略的控制效果,寻找磁流变液弹减振器最合适的控制策略。
1 发动机减振控制模型
1.1 发动机减振动力学模型
发动机-车体是一个复杂的多体系统,对于平置式四点悬置发动机结构,工作时主要产生垂向振动,为便于分析,将动力学模型简化。忽略其他方向的振动,建立1/4 发动机2 自由度减振控制动力学模型,包括发动机垂向振动,车体垂向振动,如图1所示。
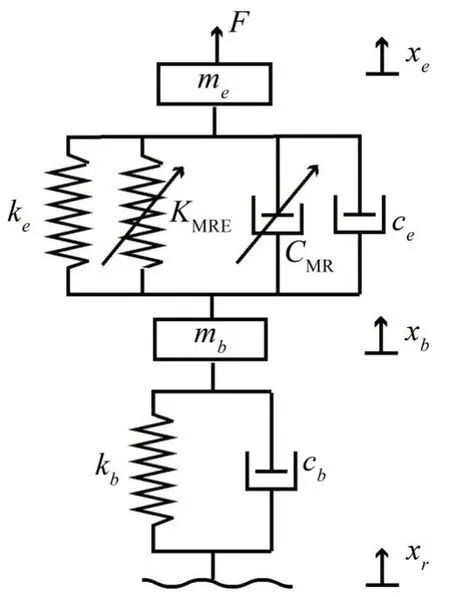
图1 1/4发动机减振控制动力学模型
图1 中:me为发动机质量;mb为车体质量;ke为悬置初始刚度;KMRE为磁流变弹性体可调刚度;ce为悬置初始阻尼;CMR为磁流变液可调阻尼;kb为悬架刚度;cb为悬架阻尼;F为发动机激振力;xe、xb与xr分别为发动机质心位移、车体质心位移与路面不平度。根据牛顿第二定律,可以得到动力学方程:
1.2 磁流变液弹减振器力学模型
磁流变液弹减振器由磁流变阻尼隔振单元和磁流变弹性体隔振单元组成,两个隔振单元相互独立,分别由不同的磁场控制。阻尼隔振单元结构如图2所示。
图2 磁流变阻尼隔振单元结构示意图
磁流变液的工作模式为剪切式,采用Bingham流体模型,其阻尼力Fc分为两部分,黏性阻尼力Fη和库仑阻尼力Fτ:
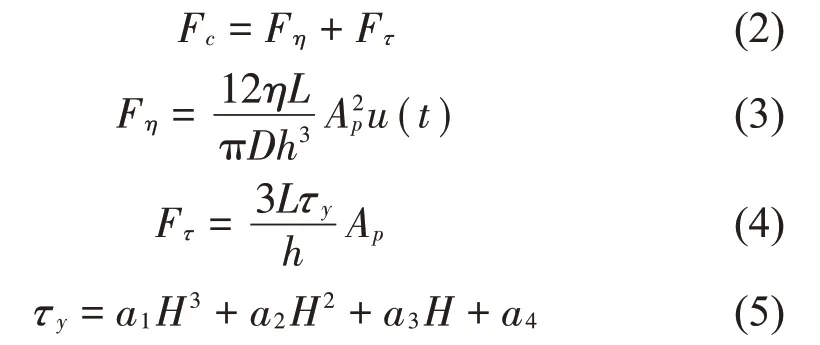
式中:η为磁流变液零磁场时的黏度;Ap为有效活塞面积;u(t)为活塞的速度;τy为磁流变液的剪切屈服强度;L为有效磁极宽度;h为活塞与缸筒的距离,D为活塞的直径;a1、a2、a3、a4为比例系数;H为磁场强度。
通过调节控制量(电流)可以得到连续变化的磁场强度,磁流变液的剪切屈服强度随之发生变化,从而控制磁流变液弹减振器输出可调的阻尼力。在一定的磁场强度范围内,磁流变液的剪切屈服强度随磁场强度的增加而单调增加。
磁流变液弹减振器中磁流变弹性体隔振单元结构如图3所示。

图3 磁流变弹性体隔振单元结构示意图
磁流变弹性体各向异性,工作模式为剪切式,其刚度表达式为:
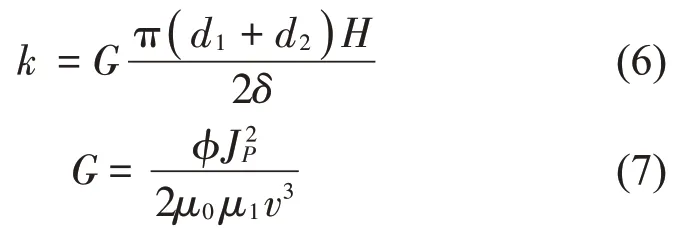
式中:G为磁流变弹性体磁致切变模量;d1为内径;d2为外径;H为高度;δ为厚度;ϕ为磁性颗粒的体积分数;ν为颗粒间距与颗粒直径之比;μ0为真空磁导率;μ1为基体磁导率;Jp为颗粒的磁化强度。
控制线圈中的电流可以改变磁场强度,从而控制磁流变弹性体的切变模量。在一定的磁场强度范围内,磁流变弹性体的刚度随磁场强度的增加而单调增加。
1.3 发动机激励与路面输入模型
发动机工作时,燃油的燃烧脉动、活塞和连杆的运动会产生不平衡力和力矩,这是发动机振动的主要原因。可用垂向简谐力表示发动机激振力:

式中:F0为激振力幅值,ω为激振力角频率。
发动机的质量在整车系统中是不可忽略的一部分,当激振力F=0时,考虑路面激励对车体的影响,发动机与悬置可以看作一个变刚度吸振器,能抑制车体振动。
本文采用滤波白噪声法进行道路时域建模,滤波白噪声路面不平度时域模型[9]:

式中:n1的取值为0.01m-1;u为车辆行驶速度;n0的取值为0.1m-1;Gq(n0)为路面不平度系数;ω(t)为高斯白噪声。
2 控制器设计
2.1 PID控制器
PID 控制算法结构简单,性能较稳定且易于控制,在工业控制中有着广泛的应用。PID 控制器由比例单元、积分单元和微分单元组成,计算公式表示为:

式中:u为控制量;e为期望值和被控量之差;KP、KI、KD为比例、积分、微分参数。
搭建PID控制系统如图4所示,由位移目标值和车体位移做差,得到误差值,作为PID 控制器的输入。PID 控制器通过比例控制使误差值减小,通过积分控制来消除系统的稳态误差,通过微分控制“预测”误差的变化趋势,减小控制时间。将以上三者进行线性组合,求出相对应的电流值,控制磁流变液弹减振器输出弹性力和阻尼力,以此减小车体的振动。
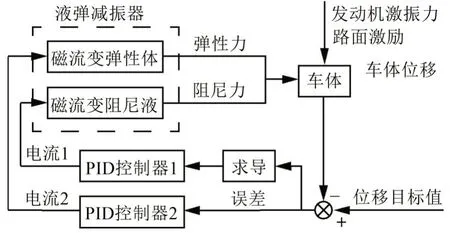
图4 PID控制系统结构框图
2.2 模糊控制器
模糊控制是以模糊集合论、模糊语言和模糊逻辑为基础的控制技术,属于智能控制。模糊控制器包括模糊化、模糊规则、模糊推理以及解模糊。模糊化是将输入量转化为模糊系统可识别的模糊量;模糊规则是通过经验建立的一个关键步骤;模糊推理则基于模糊规则实现推理决策;解模糊则是将模糊推理中的决策转化为输出量。
实现模糊控制,首先要制定合适的模糊控制规则。对于输入量位移x、速度x和输出量电流I,选取“很小(VS)”“小(S)”“中(M)”“大(L)”“很大(VL)”进行描述,得到模糊子集:{ }VS,S,M,L,VL 本文输入输出的隶属函数都选择三角形隶属度函数。根据前文PID控制仿真的经验,确定合适的输入输出量论域。建立模糊规则如表1所示。
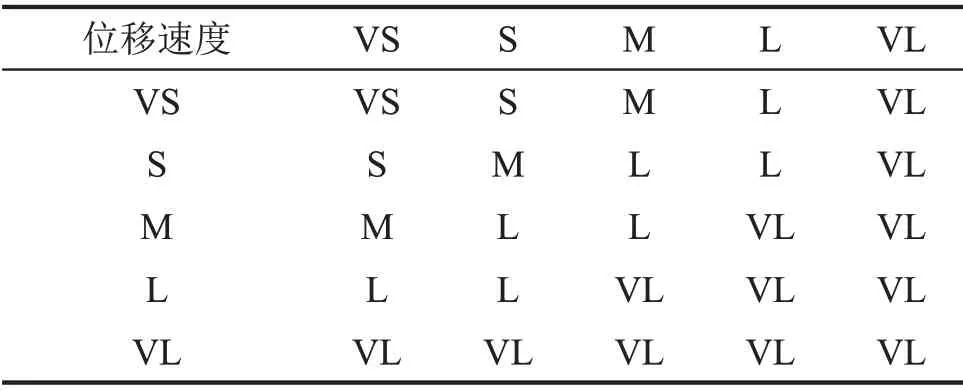
表1 模糊规则表
搭建模糊控制系统如图5 所示,将位移误差和速度误差作为模糊控制器的输入量,电流作为输出量。

图5 模糊控制系统结构框图
2.3 模糊PID控制器
模糊控制和PID控制各自存在局限性。模糊控制的自适应能力差,控制精度较低。PID 控制的参数一旦选定,往往适用于某一种工况,而在车辆工作过程中,其内部和外部的扰动通常是复杂多变的。
将两者结合起来,通过模糊逻辑优化PID 参数的整定,可以起到较好的控制效果。
搭建模糊PID控制系统如图6所示,模糊逻辑推理得到参数Kp,KI与KD,作为PID 控制器控制参数。此时参数Kp,KI与KD可以自适应地进行调节。
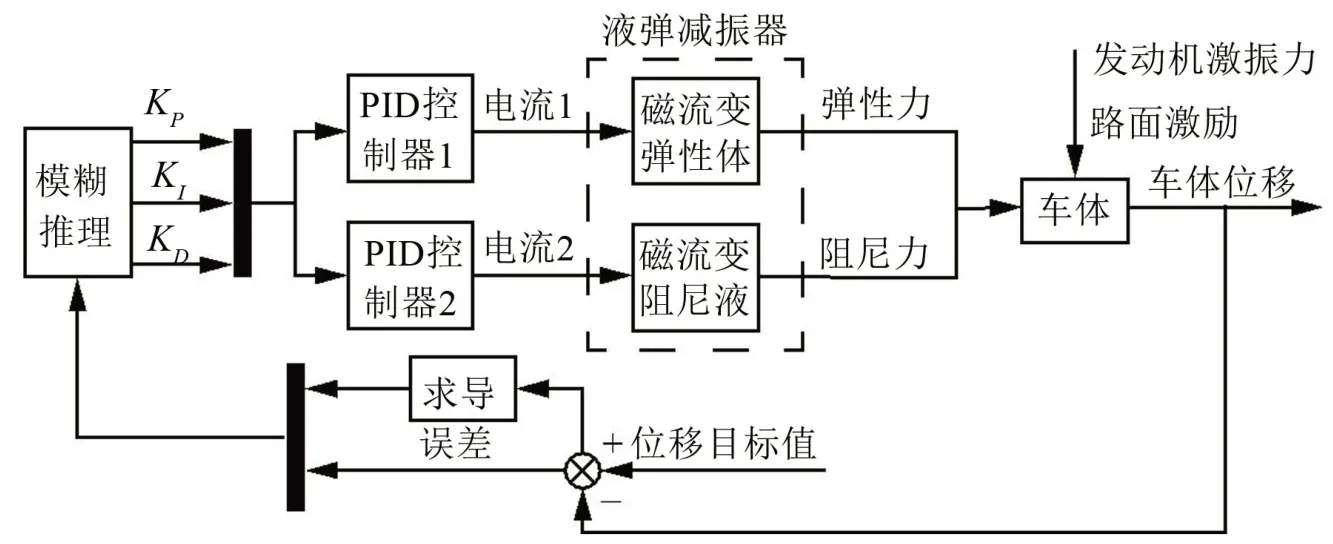
图6 模糊PID控制系统结构框图
3 天棚控制器
3.1 天棚减振控制动力学模型
在天棚阻尼减振系统中,减振器一端与减振对象连接,另一端与假想的惯性空间连接,减振器阻尼相当于天棚阻尼csky。磁流变液弹减振器不仅可以调节阻尼大小,也可以调节刚度大小,为体现此特征,在经典天棚阻尼控制模型中增加刚度ksky,相当于减振器中变刚度部分。建立天棚减振控制动力学模型如图7所示。可以得到天棚控制动力学方程:

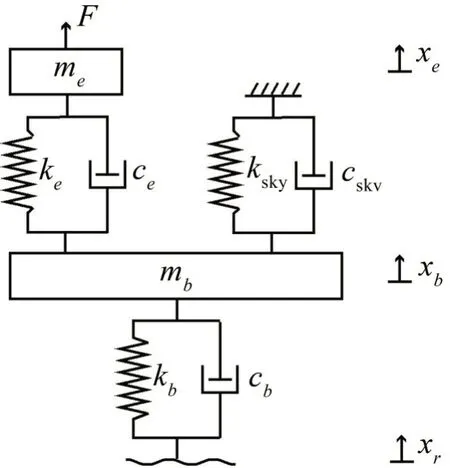
图7 1/4发动机天棚控制动力学模型
3.2 天棚控制器设计
天棚控制系统具备四个状态,即(1)ksky=0,csky=0,液弹减振器输出初始弹性力和阻尼力;(2)ksky=0,csky=cmax,输出初始弹性力和最大阻尼力;(3)ksky=kmax,csky=0,输出最大弹性力和初始阻尼力;(4)ksky=kmax,csky=cmax,输出最大弹性力和最大阻尼力。其控制算法为:

搭建天棚控制系统如图8 所示,控制算法由开关1、2 实现。开关1、2 有ON/OFF 两个状态,ON 状态输出最大刚度、最大阻尼的调节电流,OFF状态则输出最小刚度、最小阻尼的调节电流。

图8 天棚控制系统结构框图
4 仿真分析
采用1/4发动机减振控制动力学模型与1/4发动机天棚控制动力学模型,取车速6 m/s,在C 级路面不平度激励下,进行无控制、PID控制、模糊控制、模糊PID控制以及天棚控制仿真。图9和图10为车体的垂向位移响应曲线与垂向加速度响应曲线。各控制策略都取得了控制效果,模糊控制效果不太明显,而天棚控制显著地减少了加速度幅值。
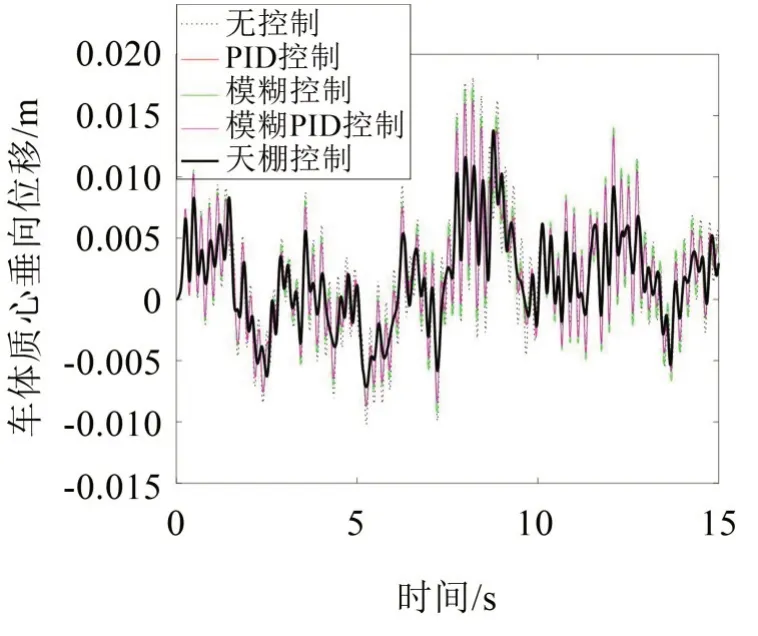
图9 路面激励下车体位移响应曲线

图10 路面激励下车体加速度响应曲线
在发动机主要工作频率内,进行无控制、PID控制、模糊控制、模糊PID 控制以及天棚控制仿真,并计算各工作频率的位移均方根值、加速度均方根值与隔振率。其中隔振率计算公式如下:

式中:ae为发动机侧加速度;ab为车体侧加速度。
如图11 所示。四种控制策略都降低了车体垂向位移,随着频率的提高,PID 控制、模糊控制和模糊PID控制的效果相趋近,天棚控制在25 Hz以上区间控制效果显著。如图12 所示。四种控制策略都降低了车体垂向加速度,随着频率的提高,与无控制效果相接近,模糊PID控制保持着最优的控制效果。如图13所示。在15 Hz~35 Hz区间内,模糊控制的隔振率比模糊PID 控制略高。在15 Hz、65 Hz~70 Hz 时,PID 控制没有起到控制效果。在额定工作频率40 Hz时,模糊PID控制与无控制下的隔振率分别为41.51 dB、37.94 dB,提高了9.4%。表2、表3、表4可以看出,天棚控制下车体位移有效减少,但是模糊PID 控制下车体加速度稳定降低,并且基本上有着最高的隔振率。模糊PID控制在整个工作频带内有良好的适应性和稳定的控制效果。

表2 发动机在20 Hz激励下车体垂向位移、加速度均方根值,控制率及隔振率

表3 发动机在20 Hz激励下车体垂向位移、加速度均方根值,控制率及隔振率

表4 发动机在20 Hz激励下车体垂向位移、加速度均方根值,控制率及隔振率
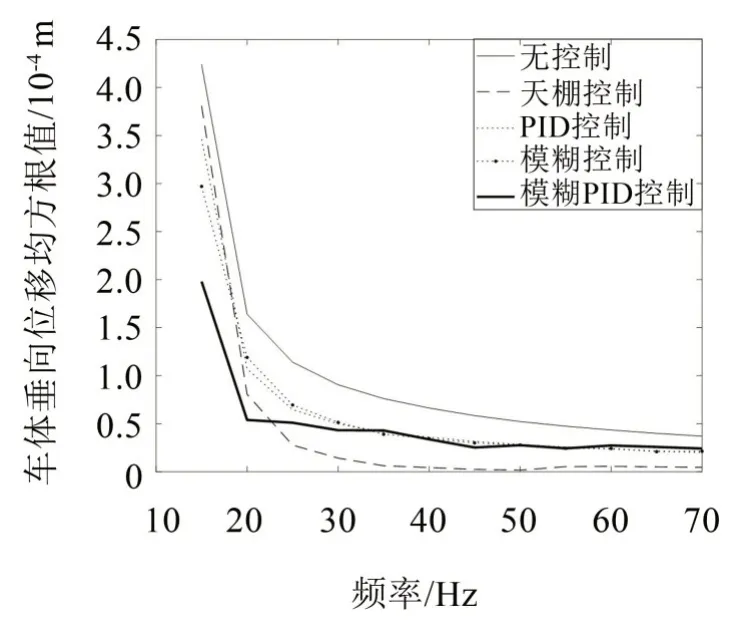
图11 发动机激励下车体位移均方根值

图12 发动机激励下车体加速度均方根值
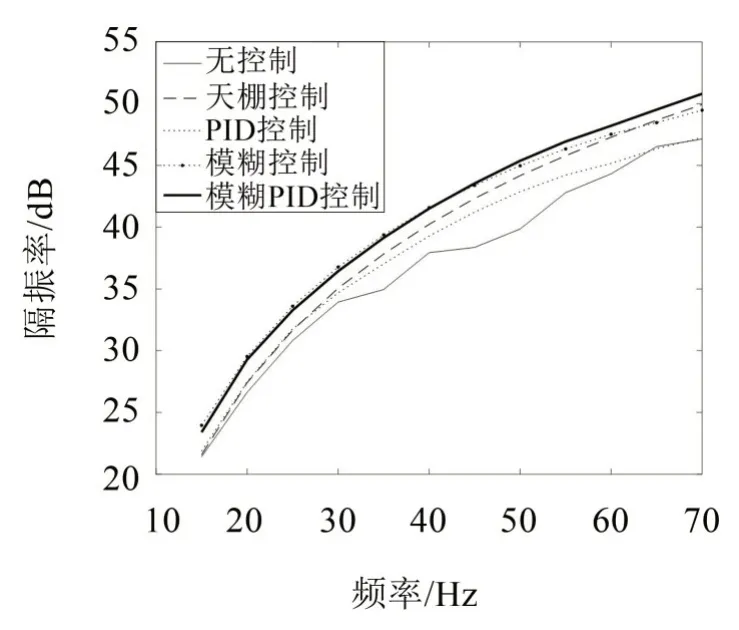
图13 发动机激励下系统隔振率
5 结 语
(1)设计了一种可以调节阻尼和刚度大小的磁流变液弹减振器作为某型发动机悬置,建立减振器模型,采用天棚控制、模糊控制、PID 控制以及模糊PID控制,进行了发动机振动控制仿真和分析。
(2)仿真结果表明,无控制策略的磁流变液弹减振器隔振率在20 dB 以上,达到一般车辆悬置标准,表明结构可行。
(3)添加控制策略之后,车体的位移和加速度均降低,隔振率提高。模糊PID 控制能有效降低发动机向车体传递的加速度,隔振率提高10%左右,且控制效果稳定,表明控制策略可行。
