基于ASIC的石英音叉陀螺接口电路设计
2022-07-04于圣武
李 亮,于圣武
(1.中国电子科技集团公司第四十七研究所,沈阳 110000;2.南京微盟电子有限公司,南京 210002)
1 引 言
陀螺是惯性导航装置和全球定位系统中的重要传感器之一,作为一种惯性敏感器件,广泛应用于战略战术武器、航天器、飞行器、汽车安全、工业自动化等领域[1]。早期陀螺是利用机械转子的角动量守恒原理来运转的,精度不高,而且由于体积、价格、功耗等方面的限制,限制了其在航空、航天、军事等对传感器要求苛刻的环境应用。随着集成电路技术的出现和发展,微机械工艺技术不断成熟,多种微机械陀螺相继面世,使惯性技术产生了一次飞跃[2],微石英音叉陀螺便是其中一种。与传统的惯性陀螺仪相比,石英音叉陀螺具有相当高的精度,并以其体积小、价格低、性能可靠等优点满足了当今惯导系统的低成本、小型化的发展要求,在众多领域得到青睐,是当前微陀螺产品的主流[3]。
2 石英音叉陀螺工作原理
微石英音叉陀螺由敏感元件及电路构成。其敏感元件具有由一个单片石英晶体构成的双端音叉结构[4],一端称为驱动音叉,另一端称为检测音叉。在叉指上镀有金属膜电极,用于驱动信号引入和角速率信号读取。在驱动电路的激励下,驱动音叉在谐振频率点做恒幅振动。敏感元件垂直轴在惯性空间旋转时产生哥氏惯性力,使检测音叉在垂直于驱动音叉振动平面的方向上产生振动,该振动的幅度正比于敏感元件在惯性空间旋转的角速度。读取检测音叉上的检测信号,即得到载体在惯性空间的角速度。
微石英音叉陀螺电路原理框图如图1所示。驱动电路与敏感元件的驱动电极构成闭环,激励驱动音叉使其在谐振点振动,同时将驱动音叉振荡幅度与基准进行比较,依据检测误差对驱动音叉进行幅度控制,使其维持恒定振幅。检测放大电路读取检测音叉电极上的电压信号,将微弱信号放大后送到相敏解调电路[5]。相敏解调电路以驱动电路输出的方波电压为参考,对来自检测电路输出的信号进行解调放大,得到与输入角速率相关的直流电压,经滤波放大电路滤除杂波和敏感元件频差造成的频率响应输出,输出一个正比于输入角速度的直流电压信号[6]。
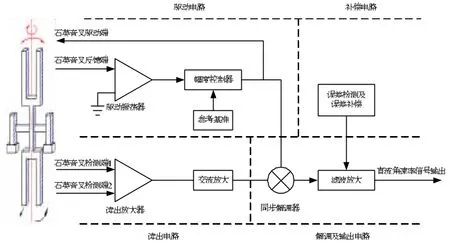
图1 微石英音叉陀螺电路原理图
3 总体设计方案
按照对功能、原理和性能指标的分析进行总体方案设计,包括元器件选型、电路原理图设计、板卡焊接及组装、板卡测试、用户测试、设计输出等。整体设计流程如图2所示。
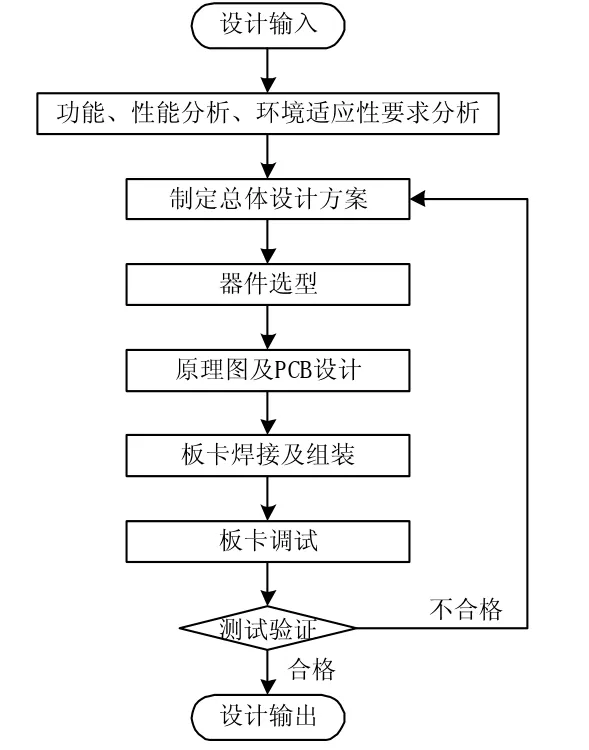
图2 设计流程图
通过对国外石英音叉陀螺仪电路发展现状的调研,可概括出微机械石英陀螺接口电路的发展趋势为:从PCB集成到芯片集成,从模拟输出到数字输出,实用化和批量化应用水平越来越高。石英音叉陀螺处理电路会随着性能逐步提高的需求,功能逐渐增强,电路的结构会日益复杂。陀螺接口电路结构需采用多个独立的放大器完成设计,采用分立器件方式的设计将使电路体积增大、可靠性降低,调试也比较繁琐。为此,本设计采用专用ASIC芯片,可代替除参考基准电压外的所有功能模块电路。系统设计框图如图3。
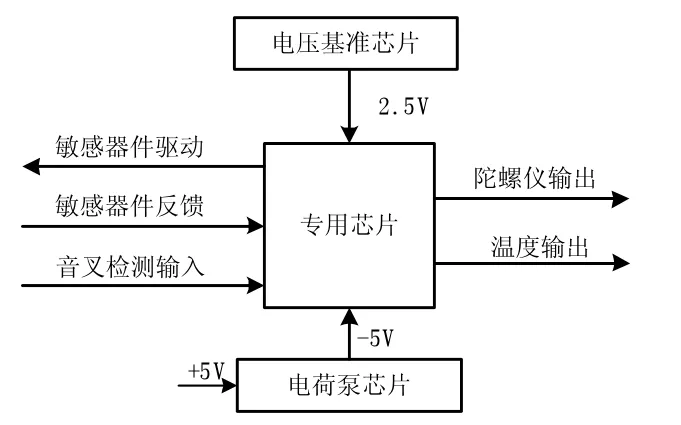
图3 系统设计框图
4 硬件设计
4.1 陀螺仪专用ASIC芯片
为石英音叉配备的专用接口芯片[7],其芯片外围元件少,可大大减少电路板面积,获得高可靠性和低功耗,也有利于大批量生产和调试。专用芯片管脚图如图4所示。
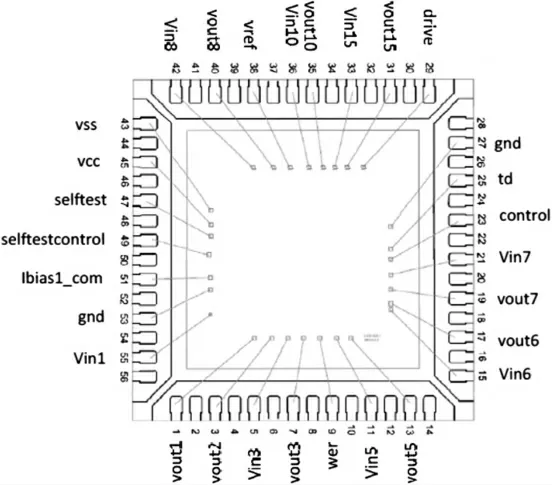
图4 专用芯片管脚图
驱动信号采用闭环正弦波自动幅度控制、相位锁定电路,实现快速建立闭环自激驱动。敏感检测提供增益、带宽自定义调整。
石英陀螺接口专用芯片采用低噪声、低漂移放大器结构设计;角速度输出放大器采用轨到轨输出结构设计;外围电路简单、使用方便,可完成音叉驱动电路、读出信号检测电路、相敏解调电路、低通滤波电路、信号放大电路和误差补偿电路的功能。具体相关参数如下:
1)芯片电源电压:5 V±10%,满足4.8~5.2 V电源输入范围;
2)电源最大工作电流:18 mA,小于指标25 mA;
3)信号输入范围:0.5 mV~VCC;
4)信号输出范围:-VCC~+VCC;
5)驱动信号:正弦波驱动,幅度3.5~4.5 V;
6)工作温度:-40℃~+85℃;
7)贮存温度:-55℃~+125℃。
4.2 负电源电压电路
专用ASIC芯片中的放大器需要+5 V和-5 V的双电源输入,因此需要一路负电源输入给专用芯片,在此选用TI公司的负电压输出芯片TPS60403,芯片电路图如图5所示。
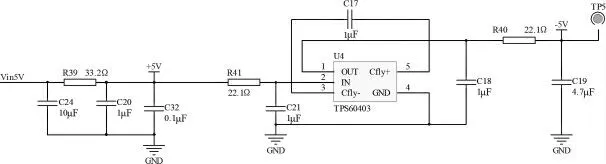
图5 负电源电压产生电路
TPS60403是一款60 mA电荷泵电压反相器,在较宽输出电流范围内实现超过90%的典型转换速率。它具有250 kHz固定工作频率,可在输入电压范围为1.6~5.5 V的情况下生成非稳压负输出电压。整个逆变器采用5引脚SOT23封装,只需三个外部电容就可以构建完整的直流/直流电荷泵逆变器。通过用ASIC专用芯片取代启动至负载通常所需的肖特基二极管,进一步减小电路板面积,依据公式为:

为抑制负电源对电路的干扰、减小输出纹波[8],电荷泵芯片输出Vout后接一阶RC滤波。其中f=250 kHz,RP=22.1Ω,CP=4.7μF,由上式可计算得出,该电路负电源抑制比等于0.006。
4.3 电压基准电路
专用ASIC芯片需要2.5 V基准电压来产生幅度误差信号,达到稳定驱动的目的。此处选用AD公司的基准电压源ADR421,电路原理图如图6所示。
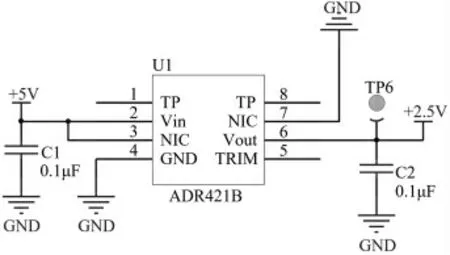
图6 电压基准电路
ADR421具有出色的噪声性能、稳定性和精度,低噪声峰值为1.75μV,温度系数为3×10-6/℃,电压调整率为35×10-6/V,非常适合陀螺仪之类高精密转换场合使用。此外,还可利用调整引脚,在±0.5%范围内调整输出电压,其他性能不受影响。
5 实验应用
对设计的陀螺仪接口电路进行测试实验。测试项包括全温测试、三温测试和标度因数系列测试。
5.1 全温测试
全温测试温度范围为-40℃~+50℃,升降温速率1℃/min,高温恒温96 min,低温恒温96 min,循环次数为2次。测试结果如图7所示。
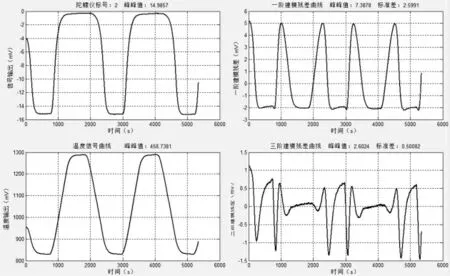
图7 陀螺仪全温变化量测试曲线
实验得到全温变化量测试指标为:
全温峰峰值:2.925 mV;
三阶STD:0.097 mV。
从全温测试数据和曲线上可以看出,陀螺仪在高低温恒温区均未出现零偏阶跃现象,测试合格。
5.2 三温测试
三温测试按如下条件进行:常温测试25±0.5℃;低温工作-40±0.5℃;高温工作50±0.5℃。先以小于3℃/min的速度达到预设温度,恒温保持1.5 h;然后开始采集数据3610 s,断电0.5 h,每个温度点采集7次数据,每次测试之间断电30 min;最后以一个小于3℃/min的速度恢复至室温。设定陀螺仪静态测试系统采样频率为1 Hz,启动陀螺仪静态测试系统同时采集陀螺仪输出和温度信号输出。图8为三温测试的结果曲线图。
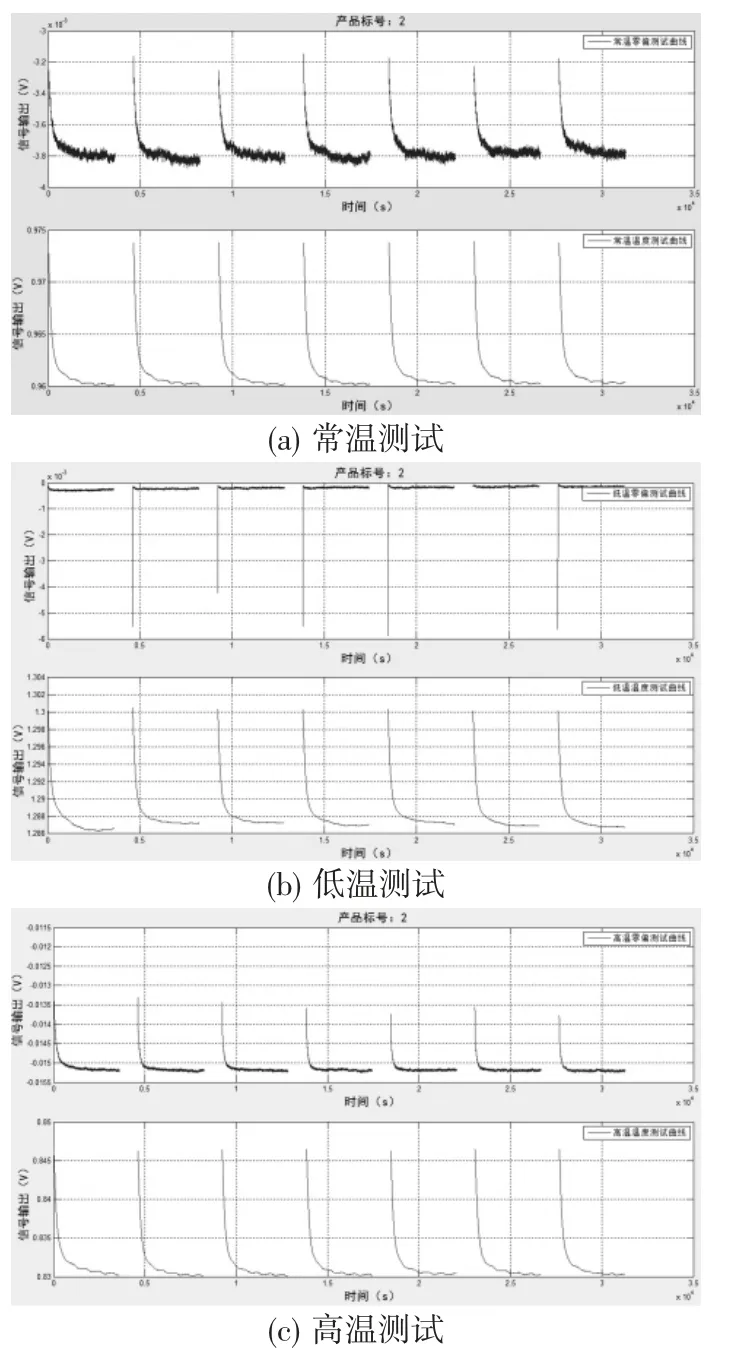
图8 三温测试结果曲线图
取第11 s到3610 s的数据作为原始样本,计算零偏、零偏稳定性、零偏重复性,测试指标如表1。
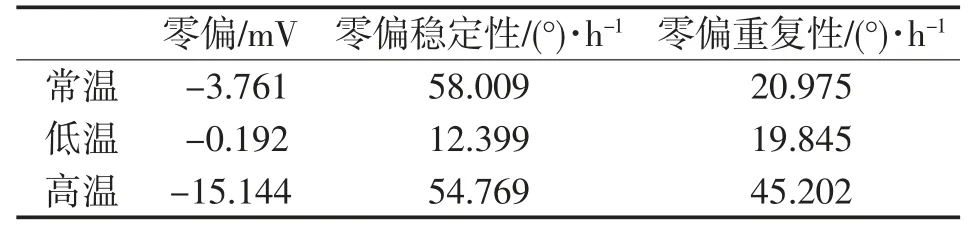
表1 三温测试指标
5.3 标度因数系列测试
标度因数系列参数通过转台测得。可测参数包括标度因数、标度因数重复性、标度因数非线性和标度因数不对称性。转台测试步骤为:①将陀螺仪通过专用工装固定在速率转台上,使陀螺仪敏感轴与转台旋转轴平行;②设定陀螺仪转台测试系统的数据采样频率为1 Hz;③按照标度因数测试速率转台的速率设置点的要求设置单轴速率转台转速;④启动陀螺仪静态测试系统采集陀螺仪的输出,测试完成后对陀螺仪断电,断电冷却30 min;⑤重复步骤③和④7次。标度因数系列测试结果如表2所示。
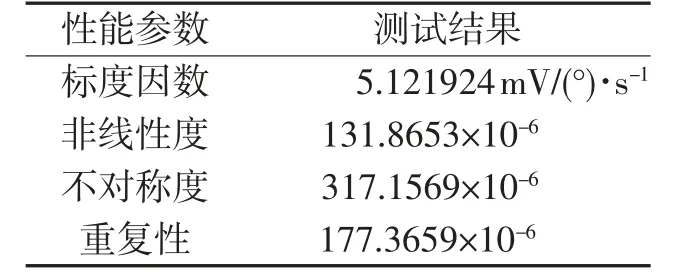
表2 标度因数系列测试结果
6 结束语
研究完成了基于ASIC芯片的陀螺接口电路设计,并调试出陀螺仪样机,性能参数测试结果良好。ASIC芯片可替代传统分立器件的设计,大大减少了器件数量,提高陀螺仪的可靠性与稳定性。在后续研究中,可进一步尝试进行国产化元器件替代,包括阻容器件,尽量选择温漂系数小、等级更高的芯片,继续提高陀螺仪的参数指标。
