助航灯具干冰清洗多目标参数混合优化
2022-07-02董慧芬刘嘉祺
董慧芬,刘嘉祺
助航灯具干冰清洗多目标参数混合优化
董慧芬,刘嘉祺
(中国民航大学,天津 300000)
采用干冰清洗技术对助航灯具进行自动清洗,并对清洗参数进行多目标混合优化。以清洁度为评价指标,使用单一变量控制法进行试验,分析清洗工艺参数影响力,获得清洗距离、角度、流量、时间等参数的最佳范围。提出以提高清洁度,节约清洗原料,降低发光口磨损度,提升清洗效率为目标,构建多目标参数优化模型,以清洗参数为决策变量,通过GA-SA混合算法求解优化参数。最后,对设定权重下的子目标优化结果进行试验验证。在仅考虑清洁度这一目标时,试验结果表明,清洗距离范围为8.5~12 cm,清洗角度范围为70°~83°,清洗流量范围为0.6 L/min及以上,清洗时间范围为2 s及以上。通过求解多目标优化模型,获得清洗工艺参数组合,距离为10.801 7 cm,角度为77.459 5°,流量为0.630 1 L/min,时间为2.207 0 s。相较于传统助航灯具清洗方式,干冰清洗多目标参数混合优化获得的工艺参数组合在保证清洁度的前提下,可以实现同时使节约清洗原料、降低发光口磨损度、提升清洗效率达到理想效果的最优解,解决了人工手动清洗费时、耗力、成本高等问题。
助航灯具;干冰清洗;多目标模型;参数优化;遗传算法;模拟退火算法
保障飞行安全一直是民航领域备受重视的环节,在每年的飞行事故当中,有一大部分发生在飞机起降阶段。根据波音公司1959—2016年商用喷气飞机事故统计和国际航空运输协会(IATA)统计,进近着陆阶段飞行事故占总事故数量的60%[1]。助航灯具作为飞行员在起降阶段时的“眼睛”,经常容易受到飞机轮胎橡胶、飞机尾油以及空气灰尘的污染,进而影响灯具的发光强度,带来飞行安全隐患,所以做好助航灯具的清洁工作十分重要。
人力清洗是助航灯具传统的清洗方式,由于其存在的耗时费力、污染严重、成本较高等诸多弊端,国内外逐步开始研究半自动清洗设备去代替人力清洗。孙广奇等[2]使用刀刃刮除的方式对发光口表面的橡胶进行清理。胡卫卫等[3]研发了跑道灯除污系统,并对清洗角度、清洗压力以及喷嘴结构对清洗效率的影响进行了分析。程彬彬等[4]采用碳酸氢钠喷丸对助航灯具进行清洗,分析了污染物清洁度与清洗介质尺寸、角度、速度等参数的关系。这些研究均停留在如何提升清洁度的层面,而提升清洁度所改变的相关清洗参数势必会导致其他清洗工艺效果的下降。如增大清洗流量可以提升清洁度,同时也会导致清洗原料的浪费,延长清洗时间则会导致清洗效率的降低。因此,如何使多个清洗工艺效果达到平衡,在保证清洁度合格的前提下,能够提高清洗效率,节约清洗试剂,降低灯具表面磨损度目前还未曾有研究。
目前国内在助航灯具清洗研究中运用的方法有许多种,每种方法都存在特定的优势,同时也存在一定的弊端,它们各自的优缺点见表1。
符合美国环保署EPA规定的干冰颗粒作为一种清洗原料,不仅可以通过自身的“微型爆炸”效果使灯具表面覆盖的橡胶得以有效清除,而且由于其在清洗过程中瞬间气化,不会产生任何二次污染。在20世纪美国人便开始使用干冰颗粒对顽固油污和碳氢化合物进行清洗[5-7],随后Hill[8]和Toscano等[9]对干冰清洗机理做出解释,并提出响应模型。在常温常压状态下,–78 ℃的干冰颗粒接触到污染物表面后,快速升华吸热,体积膨胀,与污染物进行热交换,使之出现脆化爆炸现象,伴随压缩气体的冲击作用,污染物从物体表面脱落。近些年来,国内外相继把干冰应用在各个清洗领域当中[10-14],日本、德国和英国先后研发出自动化程度较高的助航灯具干冰清洗车,并投入使用[15]。
表1 清洗方式对比
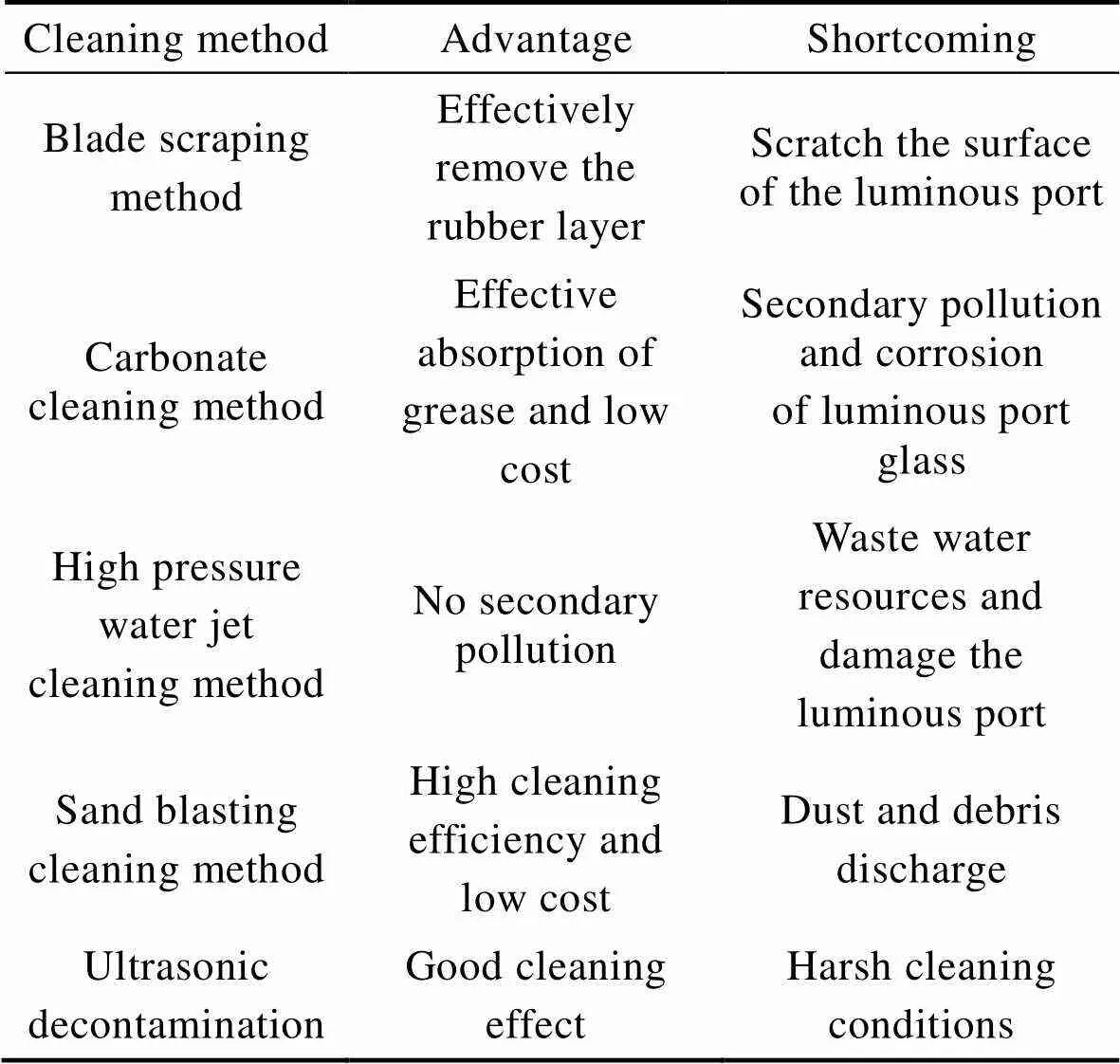
Tab.1 Comparison of cleaning methods
基于以上分析,现采用干冰颗粒作为清洗介质对助航灯具进行清洗试验,分析清洗参数与清洁度之间的关系,以保证清洗效果、提高清洗效率、节约清洗原料、减小对灯具表面磨损程度为目标,建立多目标优化模型,进行相关参数的优化,为助航灯具清洗工作提供参考依据。
1 试验
1.1 设备及材料
试验设备包括优跃CL-0119A型干冰清洗机、BRTIRUS0707A型串联机械臂、储气罐、过滤器和空气压缩机等。空压机和储气罐为干冰清洗机提供气源;过滤器用来过滤空气中的水分,防止与干冰混合后结块堵塞喷枪口;干冰清洗机的喷枪连接在机械臂末端,用来喷射干冰清洗污渍。清洗试验平台如图1所示。

图1 清洗试验平台
试验清洗样本制作方法如下:把加热到黏流态的橡胶与油污混合,以此来模拟助航灯具实际污染物成分飞机轮胎橡胶和飞机尾油,同时为了方便计算样本的清洁度,加入少量墨汁使混合物着色,橡胶、油污、墨汁三者的体积比约为5︰2︰1。此时的混合物没有到达理想中的黏稠状态,于是加入麦芽糖并不断搅拌,直到混合物呈现黏稠状态。把调制好的混合污染物均匀涂抹于发光口玻璃表面,厚度约为2 mm,随后在空气中静置晾干。
1.2 方法及参数
为了研究单一清洗参数与清洁度的关系,依次改变清洗距离、角度、流量和时间中的一个参数,同时固定其他参数进行试验[16-17],记录每次试验后的样本清洁度。清洗距离定义为喷嘴末端到试验样本中心点的直线距离;清洗角度定义为喷嘴与试验样本水平面的夹角;清洗时间定义为清洗一个发光口所需要的时间;清洗流量为干冰清洗机上面显示的实时流量值。试验使用的干冰清洗机为恒压工作,固定为0.6 MPa,不随其他参数的改变而改变。清洁度定义为灯具发光口清洗干净的面积与总面积的比值,通过清洁度来判断干冰清洗的除污效果,清洁度计算公式如式(1)所示。
计算清洁度时,采用Matlab图像处理的方法[18],具体操作步骤如下:1)用摄像机对清洗后的助航灯具发光口进行图像采集;2)Matlab读取图像,将彩色图像转化为灰度图像;3)采用中值滤波法进行噪声去除,在保护污斑图像边缘细节信息的同时过滤掉玻璃表面的杂质;4)采用均值迭代阈值分割法进行前景提取,并生成二值化图像;5)二值化图像中,黑色像素点区域为污斑区域,即为未清洗干净区域,白色像素点区域为清洗干净区域,白色像素点与总像素点的比值就是最终清洁度的值。
设计的参数组合见表2,以上述试验方法进行清洗试验,分析各清洗参数对清洗效果的影响。
表2 工艺参数因素水平
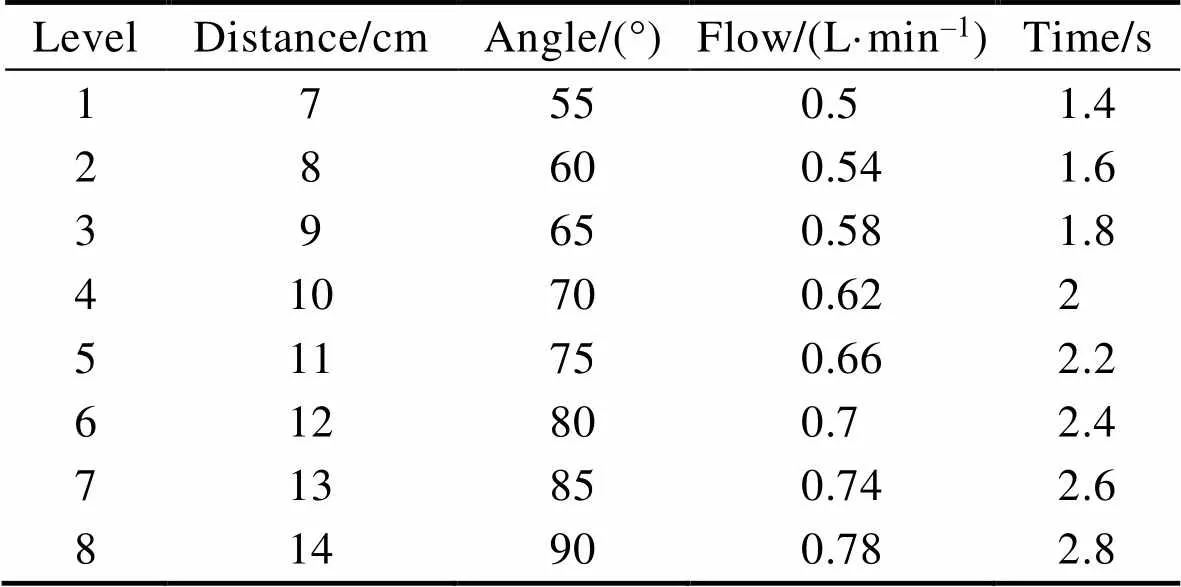
Tab.2 Process parameter factor level table
1.3 结果分析
1.3.1 清洗距离对清洗效果的影响
固定喷嘴角度为80°,清洗流量为0.7 L/min,清洗时间为2.4 s,清洗距离从7 cm开始,每次增加1 cm,共进行8组试验,试验结果如图2所示。清洗距离为8.5~12 cm时,灯具清洁度在0.9以上,在10 cm处可以达到0.95。根据宋灿等[19]、彭家强等[20]的研究,由于有效受力面积和清洗距离相互作用,射流冲击力随清洗距离的增大先增大后减小,所以过长的清洗距离和过短的清洗距离均无法完成清洗任务,最佳清洗距离范围为8.5~12 cm。
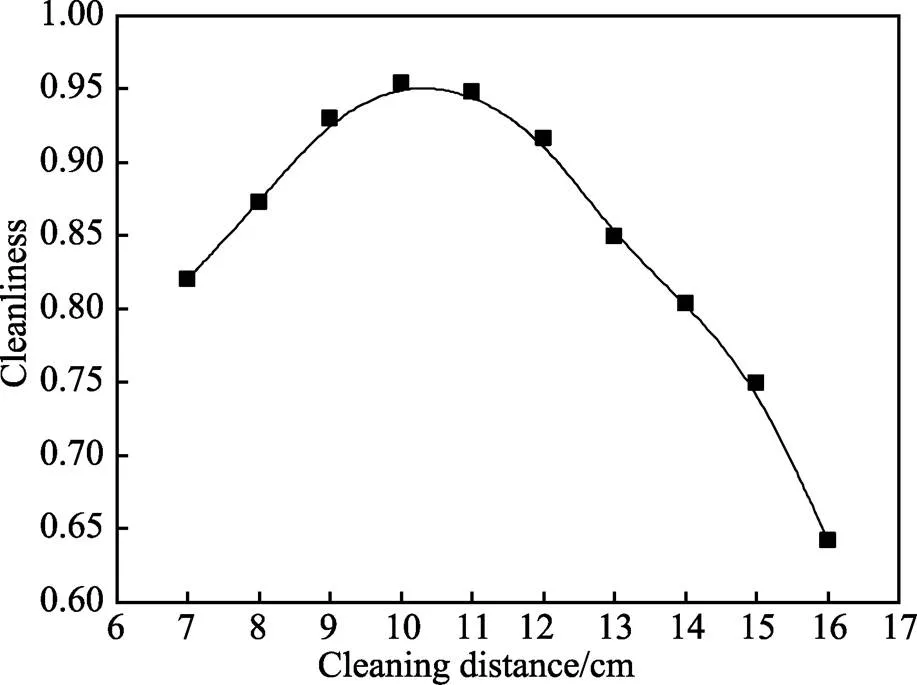
图2 距离与清洁度的关系
1.3.2 清洗角度对清洗效果的影响
固定清洗距离为10 cm,清洗流量为0.7 L/min,清洗时间为2.4 s,清喷嘴角度从55°开始,每次增加5°,共进行8组试验,试验结果如图3所示。清洗角度为70°~83°时,灯具清洁度在0.9以上,在75°处可以达到0.95。喷嘴与发光口成一定角度时产生的冲击力有一个垂直分量和一个水平分量,垂直分量使得污渍凝结、脆化,水平分量则可以使污渍从发光口表面剥离、脱落。当清洗角度过小时,冲击力的垂直分量小,水平分量大,污染物与干冰颗粒进行能量转换不够充分;而清洗角度过大时,冲击力的垂直分量大,水平分量小,污染物无法彻底脱落,所以最佳的清洗角度为70°~83°。

图3 角度与清洁度的关系
1.3.3 清洗流量对清洗效果的影响
固定清洗距离为10 cm,清洗角度为75°,清洗时间为2.4 s,清洗流量从0.5 L/min开始,每次增加0.04 L,共进行8组试验,试验结果如图4所示。清洗流量超过0.6 L/min时,灯具清洁度可以达到0.9;当流量值增加到0.66 L/min以上时,清洁度可以达到0.95。干冰颗粒的流量对清洗效果有直接影响,流量越大,干冰颗粒可以与污染物进行充分能量转换,清洗效果越明显,最佳清洗流量范围为0.6 L/min以上。
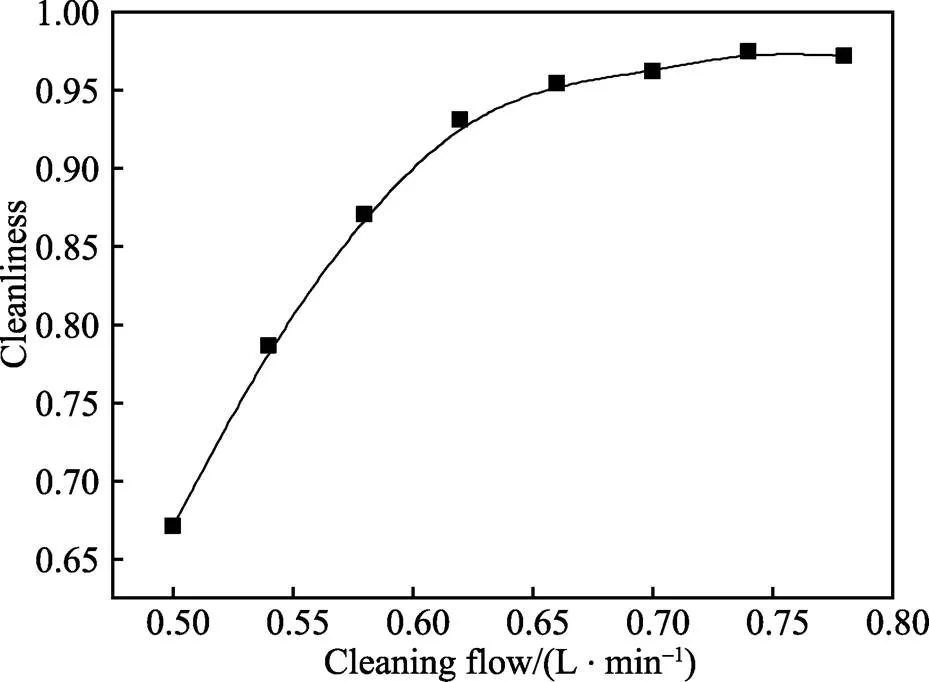
图4 流量与清洁度的关系
1.3.4 清洗时间对清洗效果的影响
固定清洗距离为10 cm,清洗角度为75°,清洗流量为0.66 L/min,清洗时间从1.4 s开始,每次增加0.2 s,共进行8组试验,试验结果如图5所示。清洗时间超过2 s时,灯具清洁度在0.9以上;当清洗时间达到2.2 s时,清洁度可以达到0.95。因此,清洗时间也对清洗效果有直接影响,时间越长,喷射到污染物表面干冰的量越大,清洗效果越好,最佳清洗时间范围为2 s以上。
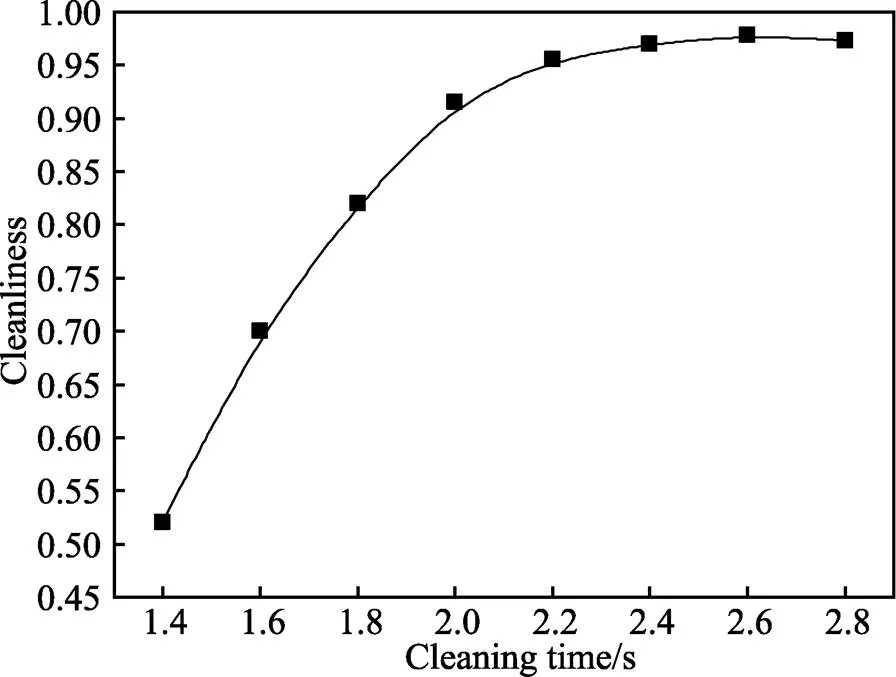
图5 清洗时间与清洁度的关系
2 清洗参数多目标优化模型建立
通过试验获得了清洗参数(距离、角度、流量、时间)对清洁度的影响规律,并且分析了各个参数的最佳取值范围,本节将对各优化目标进行建模。
2.1 子目标定义及建模
2.1.1 清洁度
由于试验次数的有限性,所获得的参数与清洁度之间的关系是离散的点状分布状态,无法用准确的线性关系来表述,所以本文采用模糊控制建模[21-22]的方法来解决这一问题。主要步骤如下所述。
1)确定模糊控制系统的输入和输出,取输入为距离、角度、流量、时间这4个影响参数,输出为清洁度。
3)清洁度预测,搭建好模糊推理规则库之后,任意输入一组参数,经过模糊控制器的推理,得到清洁度的模糊子集和隶属度,然后利用最大隶属度平均法mom进行反模糊求解,这样就可以输出这组参数对应的清洁度数值。最大隶属度公式如式(2)所示。
2.1.2 干冰消耗量
干冰消耗量定义为清洗单个发光口所消耗的干冰体积,计算公式如式(3)所示。
式中:为干冰的体积流量;为清洗单个发光口所需要的时间。
2.1.3 损伤度
损伤度定义为干冰颗粒冲击灯具表面时对玻璃表面产生的损伤程度,用冲击力在试片表面的垂直分量来表示,冲击力越大,损伤度越高。由于喷嘴末端距离样本很近,所以可以忽略空气阻力和干冰颗粒所受的重力。根据文献[23],发光口所受冲击力的垂直分量如式(4)所示。
式中:为流体的密度;V为体积流量;0为干冰颗粒在喷嘴出口处的速度;为喷嘴与发光口夹角的正弦值。
将干冰体积流量代入式(4),损伤度如式(5)所示。
2.1.4 清洗效率
清洗效率用清洗单个发光口所用时间来表示。越大,清洗效率越低;越小,清洗效率越高。
2.2 清洗参数多目标优化模型
以保证清洗效果、提高清洗效率、节约清洗原料、减小对灯具表面磨损程度为目标,采用权重分配的方法建立目标函数并进行单位化处理[24],如(6)式所示。
3 基于GA-SA混合算法的多目标清洗参数优化
针对于本文中多目标寻优的情况,已经建立了相应目标函数,最终目的是求得目标函数的最大值。在遗传算法中加入模拟退火算子,寻找全局最优解[25]。算法采用内外双层循环模式,内层循环由遗传操作进行函数值寻优,并通过Metropolis准则以一定概率保留每一次迭代的最优解,外层循环通过温度更新函数修改温度值,降温过后再次进入内循环,直到温度降为设定值。
3.1 问题编码
由于决策变量需要精确到小数位,对精度有较高要求,且取值为连续数值,所以采用浮点数编码,即真实值编码。相较于二进制编码,浮点数编码运算更加简便,提高了运算效率。
3.2 适应度函数
在不能确定目标函数函数值正负的情况下,为了保证个体适应度总能取到非负值,于是设定适应度函数,如(7)式所示。
3.3 遗传算子
1)选择算子。为了防止最优解流失,每次迭代把当前群体中适应度最低的个体淘汰,用适应度最高的个体进行替换。其余个体按照轮盘赌的方式以一定概率复制下来[26],个体被复制的概率ps如式(8)所示。



3)变异算子。在单个染色体上指定一点为变异点来进行基因突变,变异概率为m。
3.4 算法操作流程
GA-SA算法流程如图6所示。
1)初始化种群,设置种群规模、初始温度0;初始化遗传代数计数器,按照浮点数编码的方法生成初始种群()。
2)根据适应度评价公式计算个体适应度值f,保留当前目标函数最优解max。
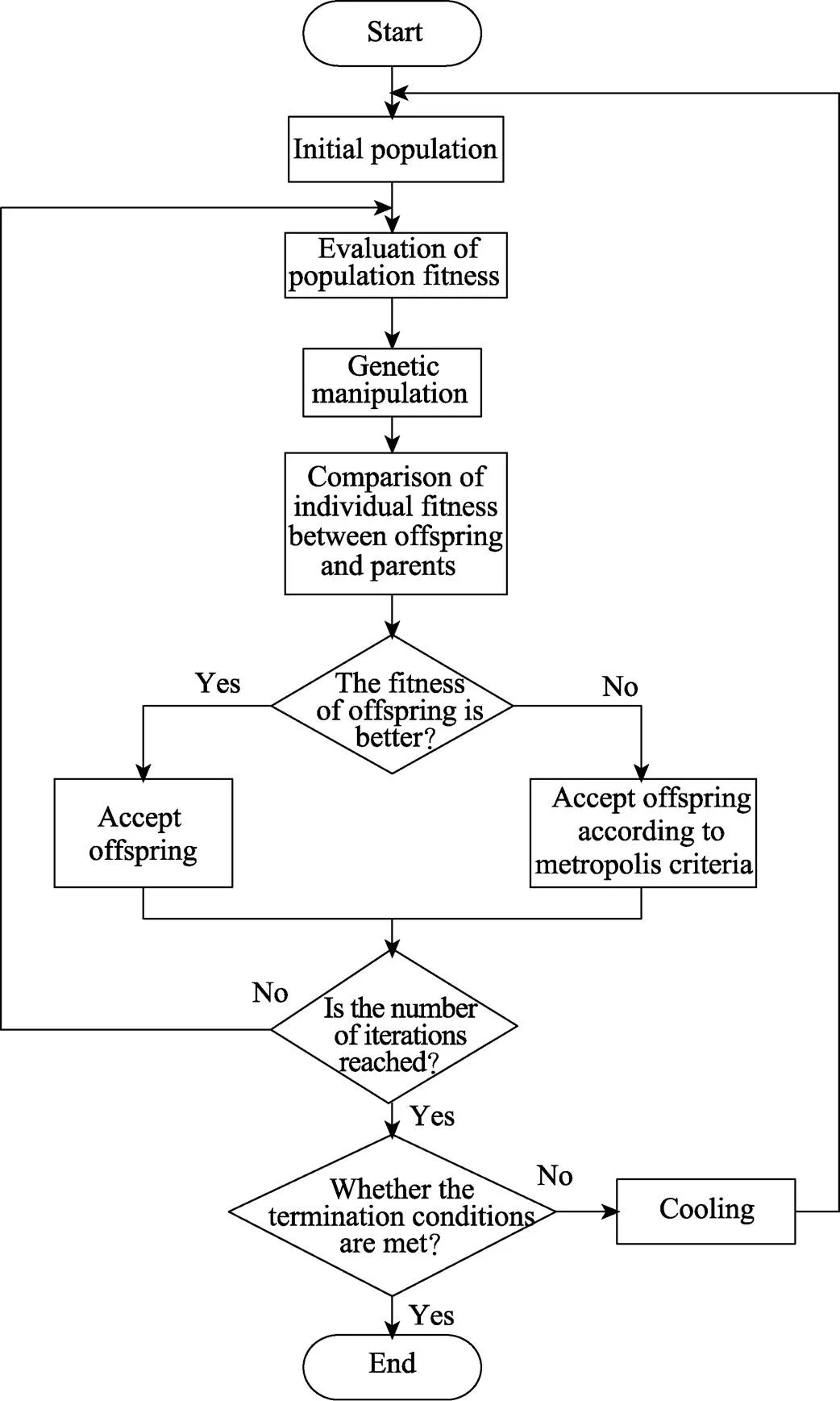
图6 GA-SA算法流程
3)进行遗传操作,得到子代种群m()。
4)判断子代种群m()中个体适应度值mi是否优于父代种群()中个体适应度值f,并按照Metropolis准则接受子代,准则如式(10)所示。

式中:为接受子代的概率;为当前温度。此时种群更新为m()。
3.5 优化结果分析
优化算法中,参数、m、0、E、的取值分别为0.5、0.1、100、2、0.6。子目标函数的权重分布见表3。根据不同的权重分布,优化结果见表4。

表3 权重分布

Tab.3 Weight distribution
表4 不同权重下的优化结果
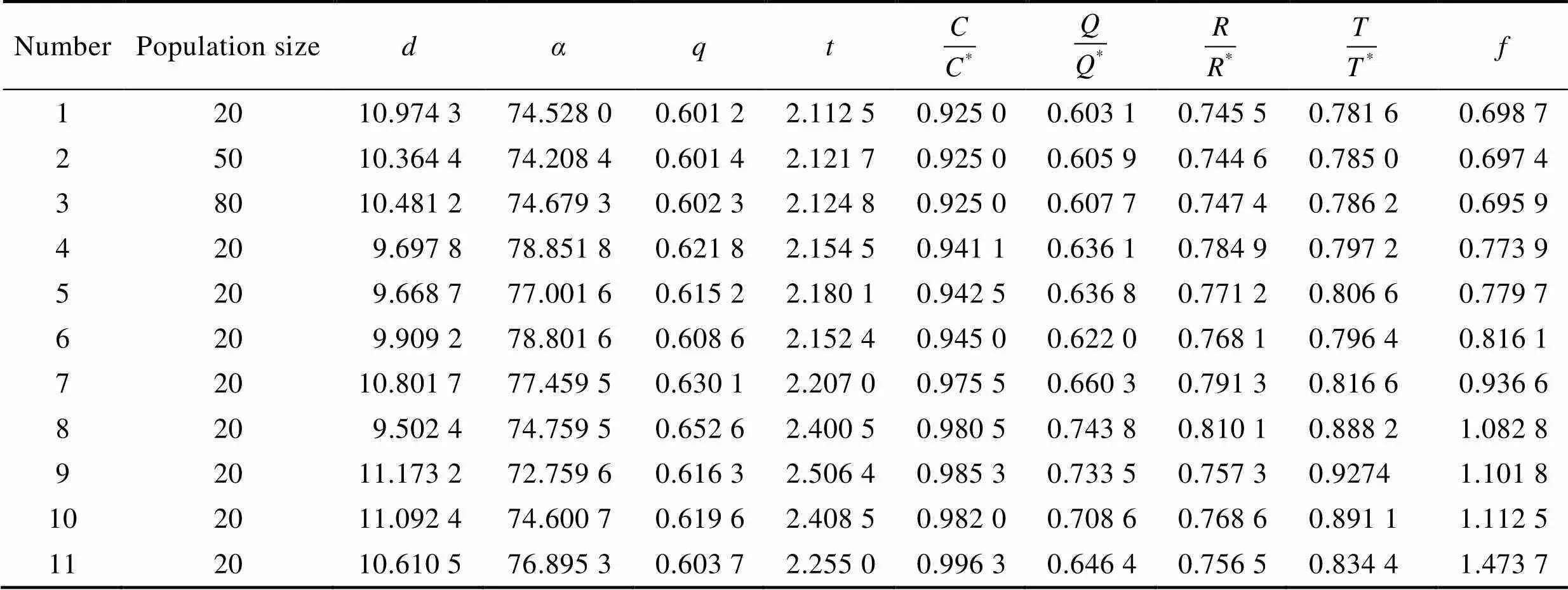
Tab.4 Optimization results under different weights
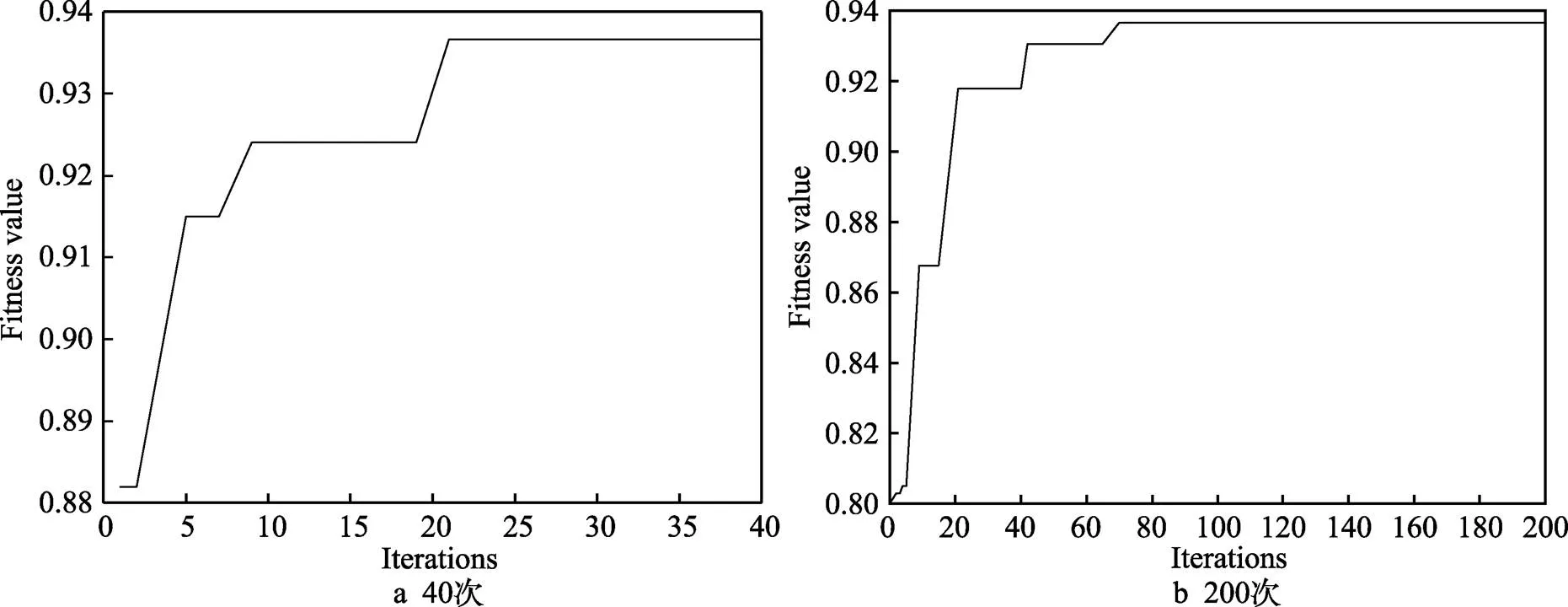
图7 迭代收敛情况
由图7可知,迭代40次时,适应度值在起初有一个大幅度提升,收敛速度很快。在5~20次迭代时,收敛速度变慢,并且在第20次附近达到最佳适应度0.936 6。通过改变模拟退火的冷却系数,把迭代次数改为200,同样在前期收敛速度很快。当迭代到70次左右时,出现最佳适应度值,与迭代次数为40时的最佳适应度处在同一水平,所以增大迭代次数对清洗参数的最终优化结果并无影响。
3.6 实验验证
本节将对优化结果进行实验验证,由于设备精度的原因,清洗参数无法精确到小数点后4位,所以在实验平台上实际设置的优化参数如下:清洗距离为10.8 cm,清洗角度为77.5°,清洗流量为0.63 L/min,清洗时间为2.2 s。实验结果如图8所示。经计算得知,清洗后样本灯具的清洁度为0.973 4,而算法优化结果中的清洁度为0.975 5,二者基本接近。由于在图像处理过程中,外界光强以及拍摄角度均会对结果产生一定误差,所以计算结果偏低于理论值。综上所述,参数优化结果符合预期设想。
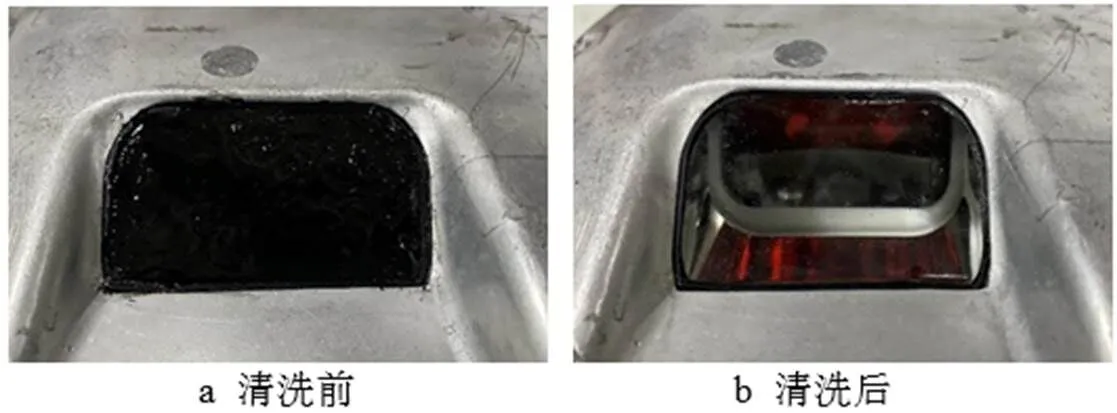
图8 清洗效果
4 结论
运用干冰清洗技术对助航灯具进行清洗,通过试验验证了方案的可行性,并获得了清洗参数的最佳取值范围。在仅考虑灯具清洁度时,清洗距离为8.5~12 cm,清洗角度为70°~83°,清洗流量为0.6 L/min及以上,清洗时间为2 s及以上,此时灯具的清洁度可达90%以上。
在保证清洁度的前提下,同时考虑了节约清洗原料、降低灯具发光口磨损程度、提升清洗效率这3个指标,通过建模和设定目标函数,运用GA-SA混合算法对清洗参数进行了优化。当清洗指标的权重分别为0.4、0.2、0.2、0.2时,优化得出清洗距离为10.801 7 cm,清洗角度为77.459 5°,清洗流量为0.630 1 L/min,清洗时间为2.207 0 s,并且通过实验验证了此组结论。
本文的研究内容有效解决了传统人工手动清洗助航灯具费力的问题,有较大的工程应用价值。
[1] 鲁志东, 张曙光, 戴闰志, 等. 大型民机进近着陆段异常能量风险判据[J]. 航空学报, 2021, 42(6): 102-115.
LU Zhi-dong, ZHANG Shu-guang, DAI Run-zhi, et al. Abnormal Energy Risk Criteria of Large Civil Airplanes in Approach and landingFull Text Replacement[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(6): 102-115.
[2] 孙广奇. 基于粘接理论的跑道灯除污试验及设备研究[D]. 成都: 西南交通大学, 2009.
SUN Guang-qi. Research of Decontamination Experiment of Runway Light and Decontamination Equipment Based on Bonding Theory[D]. Chengdu: Southwest Jiaotong University, 2009.
[3] 胡卫卫. 车载机场跑道指引灯干粉清洗系统的开发[D]. 厦门: 厦门理工学院, 2017.
HU Wei-wei. Development of the Vehicle Powder Cleaningsystem for the Runway Light[D]. Xiamen: Xiamen University of Technology, 2017.
[4] 程彬彬, 于之靖. 嵌入式机场助航灯具污染胶层去除机理[J]. 科学技术与工程, 2019, 19(2): 86-90.
CHENG Bin-bin, YU Zhi-jing. Mechanism of Rubber Mud Removal in Embedded Airport Navigation Lights[J]. Science Technology and Engineering, 2019, 19(2): 86-90.
[5] OSBORN C. Precision Cleaning is a Quality Concern[J]. Manuf Eng, 2003, 131(2): 112.
[6] SHERMAN R, HIRT D, VANE R. Surface Cleaning with the Carbon Dioxide Snow Jet[J]. Journal of Vacuum Science & Technology A: Vacuum, Surfaces, and Films, 1994, 12(4): 1876-1881.
[7] 武爽爽, 贾秀杰, 熊胜, 等. 面向再制造的油漆清洗技术综述[J]. 表面技术, 2021, 50(3): 51-65.
WU Shuang-shuang, JIA Xiu-jie, XIONG Sheng, et al. Review of Paint Cleaning Technology for Remanufacturing[J]. Surface Technology, 2021, 50(3): 51-65.
[8] HILLS M M. Carbon Dioxide Jet Spray Cleaning of Molecular Contaminants[J]. Journal of Vacuum Science & Technology A: Vacuum, Surfaces, and Films, 1995, 13(1): 30-34.
[9] TOSCANO C, AHMADI G. Particle Removal Mechanisms in Cryogenic Surface Cleaning[J]. The Journal of Adhesion, 2003, 79(2): 175-201.
[10] 隋春飞, 蔡坚, 石振东. 干冰表面处理技术在系统级封装的应用[J]. 表面技术, 2017, 46(3): 177-183.
SUI Chun-fei, CAI Jian, SHI Zhen-dong. Application of Dry Ice Surface Treatment Technology in System-in- Package[J]. Surface Technology, 2017, 46(3): 177-183.
[11] KUMAR P G S. Dry Ice Cleaning to Improvise Dielectric Features of High Voltage Windings in Turbine Generators[C]//2013 IEEE 1st International Conference on Condition Assessment Techniques in Electrical Systems. Kolkata, India: IEEE, 2013: 23-28.
[12] ZHOU Wen-jun, LIU Ming, LIU Shi-nian, et al. On the Mechanism of Insulator Cleaning Using Dry Ice[J]. IEEE Transactions on Dielectrics and Electrical Insulation, 2012, 19(5): 1715-1722.
[13] KOHLI R. Applications of Solid Carbon Dioxide (Dry Ice) Pellet Blasting for Removal of Surface Contaminants[M]. Amsterdam: Elsevier, 2019: 117-169.
[14] MARLOWE T. Dry Ice Cleaning: The Clean in Place Solution[J]. National Provisioner, 2017, 231(12): 59.
[15] OHISHI N, KAWAGUCHI H. Method and System for Cleaning Glass Surface of Pavement Light or Reflector: AU2004289875A1[P]. 2017-03-15.
[16] 孙洪孟. 干冰清洗技术研究[D]. 大连: 大连理工大学, 2012.
SUN Hong-meng. Research on Dry Ice Blasting Technology[D]. Dalian: Dalian University of Technology, 2012.
[17] 张文超, 武美萍, 宋磊. 磨料射流铣削工艺参数优化[J]. 表面技术, 2017, 46(11): 190-197.
ZHANG Wen-chao, WU Mei-ping, SONG Lei. Process Parameters Optimization for Abrasive Jet Milling[J]. Surface Technology, 2017, 46(11): 190-197.
[18] 程彬彬. 助航灯具清洗关键技术研究[D]. 天津: 中国民航大学, 2019.
CHENG Bin-bin. Research on the Key Technology of Navigation Lights Cleaning[D]. Tianjin: Civil Aviation University of China, 2019.
[19] 宋灿, 吕彦明, 徐看, 等. 水射流冲击力的影响因素仿真分析[J]. 液压气动与密封, 2014, 34(12): 22-23.
SONG Can, LV Yan-ming, XU Kan, et al. Analysis on the Influence Factors of Impact Force Based on Simulation[J]. Hydraulics Pneumatics & Seals, 2014, 34(12): 22- 23.
[20] 彭家强, 宋丹路, 宗营营. 磨料水射流对金属材料去除力和去除模型的研究[J]. 机械设计与制造, 2012(2): 17-19.
PENG Jia-qiang, SONG Dan-lu, ZONG Ying-ying. Research of Removing Force and Removing Model of the Abrasive Water Jet on Metal Material[J]. Machinery Design & Manufacture, 2012(2): 17-19.
[21] 陆国胜, 龚烈航, 徐延军, 等. 工程装备高压水射流清洗效能的模糊综合评判[J]. 解放军理工大学学报(自然科学版), 2002, 3(2): 66-69.
LU Guo-sheng, GONG Lie-hang, XU Yan-jun, et al. Fuzzy Synthetical Evaluation on High-Pressure Water-Jet Cleaning Efficiency of Engineering Equipment[J]. Journal of PLA University of Science and Technology (Natural Science), 2002, 3(2): 66-69.
[22] 高道明, 陈杰. 纯水射流路面清洗效果的模糊预测和实验验证[J]. 上海交通大学学报, 2006, 40(2): 234-238.
GAO Dao-ming, CHEN Jie. The Use of Fuzzy Logic for the Prediction of Pure Water Jets Road Surface Cleaning and Experimental Verification[J]. Journal of Shanghai Jiao Tong University, 2006, 40(2): 234-238.
[23] 倪玲英. 工程流体力学[M]. 北京: 中国石油大学出版社, 2012.
NI Ling-ying. Engineering Fluid Mechanics [M]. Beijing: China University of Petroleum Press, 2012.
[24] CHEN Jie, GAO Dao-ming. Multi-Objective Genetic Algorithm for the Optimization of Road Surface Cleaning Process[J]. Journal of Zhejiang University-SCIENCE A, 2006, 7(8): 1416-1421.
[25] 邵平凡, 万程鹏. 求解全局优化问题的遗传退火算法[J]. 计算机工程与应用, 2007, 43(12): 62-65.
SHAO Ping-fan, WAN Cheng-peng. Genetic-Annealing Algorithm for Global Optimization Problems[J]. Computer Engineering and Applications, 2007, 43(12): 62-65.
[26] 周明, 孙树栋. 遗传算法原理及应用[M]. 北京: 国防工业出版社, 1999.
ZHOU Ming, SUN Shu-dong. Genetic algorithms: theory and applications[M]. Beijing: National Defense Industry Press, 1999.
Multi-objective Parameter Mixing Optimization of Dry Ice Cleaning for Navigation Aids Lamps
,
(Civil Aviation University of China, Tianjin 300000, China)
The dry ice cleaning technology is used to automatically clean the navigation aid lamps and the cleaning parameters are optimized by multi-objective mixing. Firstly, taking cleanliness as the evaluation index, the single variable control method is used to conduct experiments, analyze the influence of cleaning process parameters, and obtain the optimal range of parameters such as cleaning distance, angle, flow rate, and time; In order to improve the cleanliness, save cleaning raw materials, reduce the wear degree of luminous port, and improve the cleaning efficiency, a multi-objective parameter optimization model was established. Taking the cleaning parameters as decision variables, the GA-SA hybrid algorithm was used to solve the optimization parameters;Finally, experiments are carried out to verify the sub-objective optimization results under the set weights. The experimental results show that when only the objective of cleanliness is considered, the cleaning distance ranges is 8.5~12 cm, the cleaning angle ranges is 70°~83°, the cleaning flow range is 0.6 L/min and above, and the cleaning time range is 2 s and above; By solving the multi-objective optimization model, the combination of cleaning process parameters is obtained, the distance is 10.801 7 cm, the angle is 77.459 5°, the flow rate is 0.630 1 L/min, and the time is 2.207 0 s. Compared with the traditional cleaning method of navigation aids lamps, the combination of process parameters obtained by multi-objective parameters mixed optimization of dry ice cleaning can achieve the optimal solution of saving cleaning raw materials, reducing the wear degree of luminous port, improving the cleaning efficiency and achieving the desired effect on the premise of ensuring the cleanliness, which solves the problems of time-consuming, labor-consuming and high cost of manual cleaning.
navigation aids lamps; dry ice cleaning; multi objective model; parameter optimization; genetic algorithm; simulated annealing algorithm
V216
A
1001-3660(2022)06-0390-09
10.16490/j.cnki.issn.1001-3660.2022.06.038
2021–07–07;
2021–11–03
2021-07-07;
2021-11-03
天津市自然科学基金(17JCYBJC18200);中央高校基本科研业务费(3122016D032)
The Natural Science Foundation of Tianjin (17JCYBJC18200); Basic Scientific Research Business Expenses of Central Universities (3122016D032)
董慧芬(1970—),女,博士,副教授,主要研究方向为智能检测及控制。
DONG Hui-fen (1970-), Female, Doctor, Associate professor, Research focus: intelligent detection and control.
董慧芬, 刘嘉祺. 助航灯具干冰清洗多目标参数混合优化[J]. 表面技术, 2022, 51(6): 390-398.
DONG Hui-fen, LIU Jia-qi. Multi-objective Parameter Mixing Optimization of Dry Ice Cleaning for Navigation Aids Lamps[J]. Surface Technology, 2022, 51(6): 390-398.
责任编辑:刘世忠
