基于卷积神经网络的天基预警雷达杂波抑制方法
2022-07-01段克清王永良
段克清 李 想 行 坤 王永良
①(中山大学电子与通信工程学院 深圳 518107)
②(中国科学院空天信息创新研究院 北京 100094)
③(空军预警学院 武汉 430019)
1 引言
天基预警雷达是指以卫星为载荷平台,能对陆、海、空、天中各类运动目标进行远距离探测、定位、跟踪、分类和识别的雷达装备[1]。相较于传统机载预警雷达系统,天基预警雷达探测范围更大、发现距离更远、工作时间更长、关注动目标种类更多,同时不受国界限制,因此是当前世界各国重点发展的预警探测装备[2–8]。
由于平台运动且雷达下视工作,天基预警雷达探测动目标时同样面临强地/海杂波影响。空时自适应处理(Space-Time Adaptive Processing,STAP)技术采用空时二维联合自适应处理实现对空时耦合杂波有效滤除和目标相参积累,因此是当前各类运动平台雷达杂波抑制和运动目标检测的关键技术[9]。尽管STAP技术已逐步应用于当前先进机载预警雷达装备,但在应用于天基预警雷达时却遇到更为复杂的问题[1,10,11]。一方面,由于卫星平台运动速度较机载平台大数十倍,其主、副瓣杂波多普勒频率展宽范围也增大数十倍。即使采用中脉冲重复频率(Pulse Recurrence Frequency,PRF)工作模式,雷达回波依旧同时存在严重的距离模糊和多普勒模糊[10,11]。另一方面,地球自转影响了天基预警雷达回波多普勒频率,等效于在其方位角中引入了偏航角和偏航幅度[12]。由于平台高速运动,微小偏航角也能引起杂波多普勒频率随距离的快速变化。该变化杂波经多次距离和多普勒模糊后呈现复杂非平稳特征,使得参与自适应处理的训练样本无法满足独立同分布(Independent and Identical Distribution,IID)特性,引起传统STAP处理方法性能急剧下降。此外,相比于机载预警雷达,天基预警雷达波束覆盖区域增大数倍甚至数十倍,其回波更高概率地跨越不同地形地貌,覆盖更大城市密集区域,目标环境也更为复杂,因此杂波非均匀性也要严重得多。杂波的复杂非平稳和复杂非均匀特性,使得天基预警雷达用于估计杂波协方差矩阵(Clutter Covariance Matrix,CCM)的IID训练样本数严重不足,进而导致传统STAP方法性能无法满足实际应用需求[13]。
随卫星转动动态调整阵列方向理论上可抵消由地球自转引入的等效偏航角[14],但一方面由于实时精确调整超大孔径天线阵列轴线方向技术上存在困难,另一方面也受限于卫星载荷有限的功率支持[15],因此仍需考虑从信号处理端提升性能。文献[16]提出在相干脉冲时间内调制发射波形来消除非平稳杂波,但代价是后续无法解距离模糊[15]。文献[17–19]分别将用于消除机载雷达非平稳杂波的方位-多普勒校正、空时插值和频率非均匀采样杂波谱配准等方法应用于天基雷达。然而,该类方法在距离模糊情况下无法同时校正各次模糊杂波谱。此外,该类方法需对各距离门单独校正,运算量巨大。机载雷达中非平稳杂波由天线俯仰副瓣引入,即非平稳杂波主要为俯仰副瓣杂波,因此可通过天线俯仰向自适应滤波器来消除[20–25]。然而,天基平台运动速度太快导致其雷达俯仰主瓣杂波发生多次距离模糊并呈严重非平稳特性,如直接采用阵列俯仰维自适应滤波来处理,则导致俯仰主瓣波形畸变引起目标严重损失。
另一类方法是通过降低STAP方法IID样本需求,同时解决或缓解非平稳和非均匀杂波问题。代表性方法主要包括直接数据域(Direct Data Domain,DDD) STAP[26]、知识辅助(Knowledge-Aided,KA) STAP[27–29]和稀疏恢复(Sparse Recovery,SR)STAP[30–35]等,其核心目的均是在小样本条件下实现STAP方法次最优杂波抑制性能。其中,DDD STAP方法仅利用待检测距离单元回波数据,彻底消除了非平稳/非均匀杂波环境IID样本不足问题,但易受噪声影响且存在严重孔径损失导致性能无法达到次最优,同时空域平滑处理也决定了其仅适用于均匀线/面阵机载雷达;KA STAP方法利用载机和雷达系统先验信息预先估计CCM并对杂波进行预白化,但由于天线空域误差和杂波起伏等内/外在未知非理想因素存在,导致所估CCM与真实值存在较大偏差;此外,分别由先验知识构建CCM与最大似然估计CCM间权系数的合理分配问题,仍未较好解决;SR STAP利用杂波在空时谱平面稀疏分布特点,通过对空时谱系数施加稀疏约束,可在少量观测样本条件下重构杂波超分辨空时谱并计算相应CCM。然而,该类方法通常以迭代优化技术求解,往往存在运行时间长、执行效率低和超参数选择困难等问题,因此并不利于实际应用。尽管如此,稀疏恢复类方法为提升小样本条件下STAP性能提供了一种全新思路,即通过重构杂波超分辨空时谱的方式实现更为准确的CCM估计。
自Hinton等人[36,37]首次提出深度学习概念以来,该技术作为机器学习领域热门研究方向迅速发展起来,特别是Krizhevsky等人[38]于2012年基于卷积神经网络(CNN)提出AlexNet赢得ImageNet比赛后,深度学习方法迅速应用于各领域并取得突破性进展。Dong等人[39,40]于2014年提出了超分辨卷积神经网络模型(Super-Resolution Convolutional Neural Network,SRCNN),首次将深度学习用于图像超分辨重构领域,获得了较传统方法更优异的超分辨性能。Ronneberger等人[41]于2015年提出U-net网络并用于医学图像分割,2017年Jin等人[42]将该网络进行改进后用于提高医学图像的分辨率,即用较少数量回波信号产生的医学图像作为输入图像,同时用完整脉冲个数回波信号进行成像作为参考图像进行网络训练以提高图像分辨率。对于当前各类深度学习图像超分辨重构方法而言,其目的均是将由于观测时间受限得到的低分辨图像通过各类神经网络重构出高分辨图像。而天基预警雷达杂波抑制面临类似问题,即杂波复杂非平稳和非均匀特性导致IID样本严重不足,因此采用有限样本所估杂波空时谱为秩亏缺低分辨谱。如能利用深度学习实现对该低分辨空时谱的高分辨重构,则可预期解决STAP处理中小样本条件下杂波特性准确估计问题。
本文首先介绍了天基预警雷达信号模型及STAP机理,然后详细阐述了所提CNN STAP方法的内在机理和方法架构,最后通过仿真实验对比验证了所提方法的可行性和有效性。
2 信号模型及杂波特性分析
2.1 信号模型
假定卫星轨道为圆形轨道,天基预警雷达在固定轨道高度H上绕地球以恒定速度v运动。建立右手坐标系XYZ,其中X指向卫星惯性运动方向,Z轴指向地心,具体如图1所示。假设天基预警雷达阵列为N阵元正侧视放置均匀线阵,且阵元间隔d为半波长。θ和φ分别为天线波束指向当前杂波块的方位角和俯仰角,Rc为雷达与杂波块之间斜距。

图1 天基预警雷达几何坐标系Fig.1 Space-based early warning radar viewing geometry
受地球自转影响,杂波块对应归一化多普勒频率可表示为[12]

其中,λ为雷达工作波长,fr为脉冲重复频率,ρe和θe分别为由地球自转引起的幅度调制因子和方位偏航角,且仅与卫星轨道倾角和当前所处纬度有关。同时,定义归一化空间频率

对于均匀线阵,任一杂波块所对应时域导向矢量ωd和 空域导向矢量ωs分别为

其中,M为相干处理间隔内脉冲个数,(·)T表示矩阵转置运算。
假定各杂波块统计独立,并考虑阵元误差和杂波起伏,任一距离单元杂波空时快拍数据可表示为不同模糊距离上各杂波块回波信号叠加[43]

其中,Na和Nc分别为模糊距离环和距离环上杂波块个数;ξ(θq,φp)表示第p个模糊距离环上第q个杂波块回波幅度,且与雷达发射功率、天线增益、杂波块反射截面积、地形散射系数和雷达与杂波块间斜距等因素有关表示相干脉冲间杂波起伏分量;ε(θ,φ)=[ε1(θ,φ),ε2(θ,φ),...,εN(θ,φ)]T表示阵元误差分量,且εi(θ,φ)服从零均值方差为的复高斯分布;⊙和⊗分别表示矩阵之间的Hadamard积和Kronecker积。
由于各杂波块统计独立且ξ(θ,φ)为零均值、方差为的高斯随机变量,因此该杂波数据相应的CCM可表示为[43]
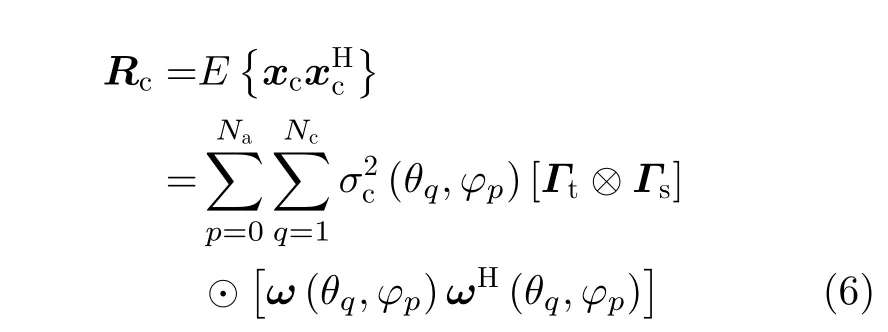
其中,E{·}表 示取期望;(·)H表示矩阵共轭转置运算;ω(θ,φ)=ωd(θ,φ)⊗ωs(θ,φ)表示杂波块对应空时二维导向矢量;Γt=Toeplitz(ζ(0),ζ(1),...,ζ(M -1))为杂波起伏引起的时域去相关矩阵,且表示由风速引起的杂波谱展宽方差[43];表示由空域阵元误差引起的空域去相关矩阵。
在保持目标信号能量基础上最小化输出噪声和杂波功率,可得最优空时二维滤波器权系数

其中,η为归一化因子,ω(θt,φt)为目标来向对应空时二维导向矢量,θt和φt分别为目标来向方位角和俯仰角为考虑噪声影响并进行对角加载后的为噪声功率;I为单位对角阵。
实际应用中无法获取准确R,通常利用待检测距离门数据相邻数据集作为训练样本经最大似然估计(Maximum Likelihood Estimation,MLE)得到

其中,L为训练样本个数;xi=xc,i+ni为第i个距离门回波数据,n为高斯白噪声。根据RMB准则[13],与最优空时滤波器性能相比平均信杂噪比(Signalto-Clutter-plus-Noise Ratio,SCNR)损失不大于3 dB要求IID训练样本数L至少为2NM。
2.2 杂波特性分析
考虑地球自转引起的等效偏航角和偏航幅度,杂波归一化多普勒频率和归一化空间频率的关系可表示为
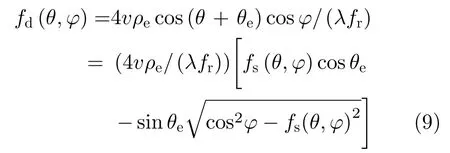
本文仿真参数主要参照美国L波段轻型天基预警雷达(L-band Lightweight Space Based Radar,LLSBR)计划[1],具体见表1。LLSBR计划脉冲重复频率(PRF)为4000 Hz,而本文中设定为10000 Hz。如表1所示,天基预警雷达主波束方位角θ0和俯仰角φ0分别为90°和–30°,则可得雷达主瓣杂波多普勒频率与距离之间的关系为
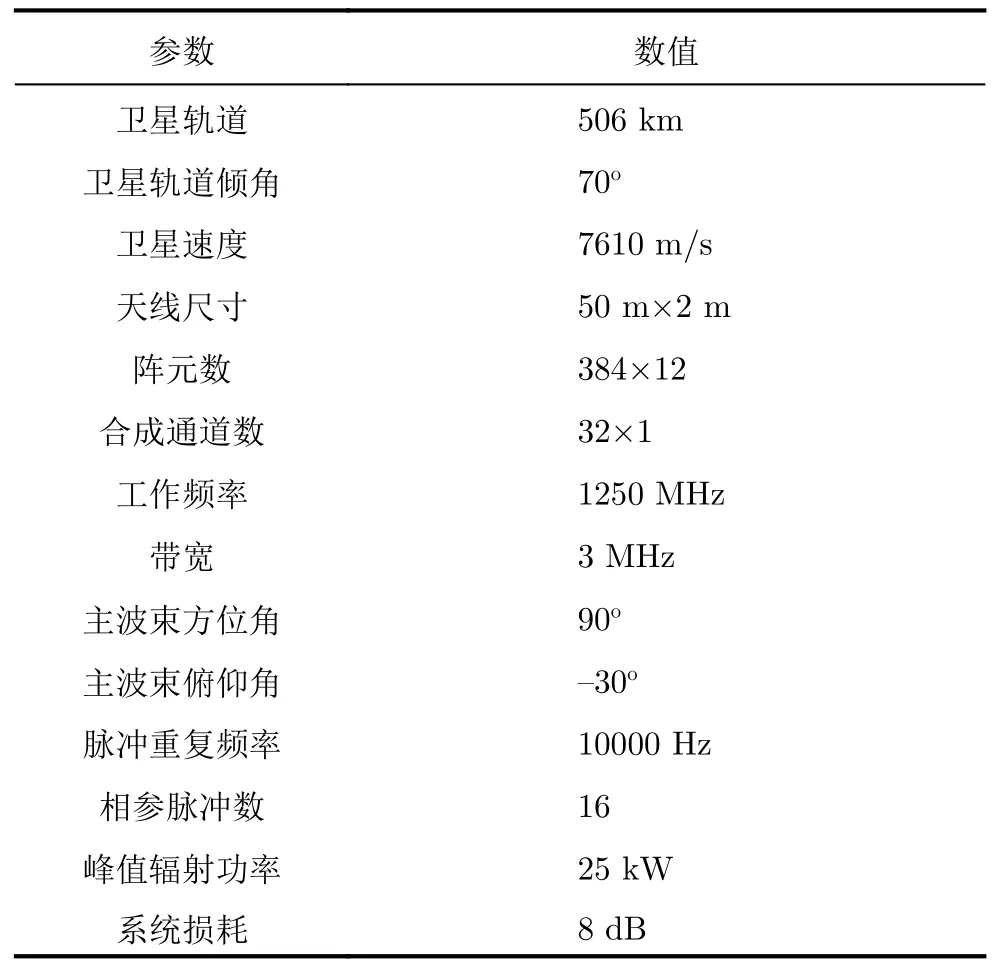
表1 仿真参数Tab.1 Parameters of simulation

由地球自转引起的等效偏航角与卫星轨道倾角和当前卫星所在纬度有关,由文献[12]可知,在极地轨道和赤道上空时,等效偏航角最大,约为3.77°。图2为天基预警雷达在偏航角为3.77°情况下的杂波分布图,其中图2(a)和图2(b)分别为杂波方位-多普勒和距离-多普勒平面分布曲线。由图2(a)可以看出,由于卫星平台运动速度较大,杂波谱在频域分布范围较大,导致其分布曲线在多普勒域发生多次混叠;同时,由于存在等效偏航角,各距离模糊回波方位-多普勒曲线存在差异性,导致多次距离模糊后谱线在空域发生展宽现象。由图2(b)可以看出,虽然等效偏航角不大,但由于卫星平台高速运动同样可导致杂波多普勒频率随距离变化而剧烈变化,具体表现为弯曲杂波分布于多个模糊距离,因此存在严重的非平稳特性。

图2 天基预警雷达杂波分布曲线Fig.2 Clutter distribution of space-based early warning radar
除上述严重非平稳杂波外,由于波束照射区域较大,天基预警雷达回波还存在严重非均匀性。在实际应用中,杂波严重非平稳性和严重非均匀性交织在一起,导致STAP处理时难以获取足够IID训练样本进行学习。因此,设计小样本条件下次最优STAP方法始终是该领域的重要研究方向。
3 深度学习STAP理论框架
3.1 空时谱稀疏超分辨理论
由式(5)可以看出,天基预警雷达回波信号可由不同来向和多普勒频率回波信号叠加而成。如将空频和多普勒频率分别离散化为Ns=ρsN和Nd=ρdM(ρs和ρd分别为空频和多普勒频率离散化因子,通常取ρs,ρd≫1)个网格点,同时忽略量化误差影响并考虑噪声因素,则天基预警雷达回波信号还可表征为

其中,ai和ωi分别为空时平面第i个网格点对应杂波幅度和空时二维导向矢量分别为空时二维平面所有网格点对应杂波幅度集合和空时二维导向矢量集合(又称字典)。
由于Ns×Nd≫N ×M,式(11)为欠定方程。正则化方法主要用于解决病态逆问题的不适定性,并得到唯一存在解,因此通常用来解决该类问题。基于杂波在空时平面稀疏先验特性,利用稀疏正则化方法求解α的问题可转化为

其中,第1项和第2项分别对应信号的保真度和稀疏度,而正则化参数λ则用于平衡两者的相对重要性;‖·‖2和‖·‖0分别表示l2范数和l0拟范数。目前,已提出大量方法来求解上述稀疏优化问题[44],其中欠定系统聚焦式求解(Focal Underdetermined System Solver,FOCUSS) STAP[31]和稀疏贝叶斯学习(Sparse Bayesian Learning,SBL) STAP[35]方法性能稳健,是稀疏恢复类STAP代表性方法。
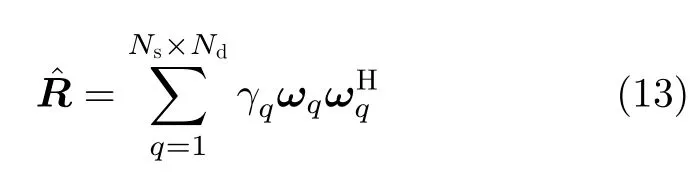
在得到空时平面各网格点杂波幅度α后,可进一步得到该距离门CCM
3.2 深度学习STAP基本原理
在STAP技术中,由少量IID训练样本所估低分辨空时谱重构高分辨空时谱的过程,本质上为图像超分辨重构,因此可借鉴当前深度学习图像超分辨重构技术来实现。基于该理念,下面介绍深度学习STAP技术基本原理。

然后,对确知CCM采用最小无失真方差响应(Minimum Variance Distortionless Response,MVDR)谱估计方法求取高分辨空时谱

其中,R为仿真所得确知为高分辨空时谱,并作为深度学习网络输出端标签数据。
显然,在小样本条件下有L ≪NM,即观测时间有限,因此无论采用何种谱估计方式均无法得到高分辨空时谱。为降低运算复杂度,本文采用傅里叶变换求取其功率谱,因此得到杂波低分辨空时功率谱Y。基于深度学习超分辨图像重构原理,本文将该低分辨谱作为神经网络输入数据,并利用特定神经网络对该低分辨功率谱进行重构,进而得到空时高分辨功率谱。重构过程可表述为

3.3 神经网络结构
借鉴SRCNN网络结构,本文提出了具有多层二维卷积结构的神经网络用于空时谱超分辨重构。如图3所示,该网络共具有5层卷积层,输入为低分辨杂波空时谱,输出为高分辨杂波空时谱。
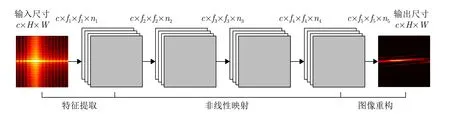
图3 所提CNN模型结构Fig.3 Structure of our CNN
第1层用于块的提取和表示,即从输入图像中提取特征:

其中,W1表示维度为c×f1×f1×n1的卷积核;c表示输入图像通道数,f1表示卷积核的长和宽,n1表示卷积核个数(输出特征通道数);*表示卷积运算;b1为n1维的偏置向量。式(17)表示从低分辨图像中提取多个图像块,每个块经卷积操作得到高维特征向量,而所有特征向量构成特征矩阵。5层卷积层均采用了整流线性单元(Rectified Linear Unit,ReLU)激活函数以及边缘补零操作,因此特征提取与表示层的输出特征维度为H ×W ×n1,H和W分别为输入空时谱图像的高和宽。
第2层到第4层均为特征的非线性映射,将提取到的特征图谱非线性地映射到变换的高维空间中:

其中,Wi表示维度为ni-1×fi×fi×ni的卷积核,fi表示卷积核的长和宽;bi为ni维的偏置向量,第4层输出的每个ni维特征向量均表征一个高分辨图像块并用于重构。
第5层为图像重构层,生成高分辨输出图像。具体表达式为

其中,W5表示维度为n4×f5×f5×c的卷积核,f5表示卷积核的长和宽;b5为c维的偏置向量。该层本质上为反卷积过程,最终将n4维特征矩阵还原为维度为H×W ×c的高分辨图像。

其中,‖·‖F表示Frobenius范数,I为CNN训练数据个数,Θ={Wi,bi},i=1,2,...,5为网络参数。模型训练阶段,均采用随机梯度下降法进行参数更新。
3.4 训练数据的生成
目前,国内外对于天基预警雷达均处于关键技术研究阶段,并未形成实际装备,因此无法获取实测数据。此外,即使可获得实测数据,也无法直接得到各距离门数据高分辨空时谱。针对该问题,本文根据文献[43]中高逼真度杂波建模仿真方法通过计算机仿真生成神经网络训练数据集,该杂波模型已经过多通道机载雷达测量(Multichannel Airborne Radar Measurements,MCARM)实测数据验证[43]。
杂波仿真过程中,天基预警雷达系统参数和平台导航参数可准确获知,根据杂波空间入射锥角和多普勒频率的依从关系,可准确计算出杂波空时分布脊线。然而,由于存在等效偏航角,不同距离门杂波脊线形状不同;在卫星轨道倾角固定情况下,卫星位于不同纬度时所等效的偏航角也动态变化,进而影响杂波空时分布;阵元误差和由风速引起的杂波起伏均为随机变量,分别引起杂波空域去相关和时域去相关,从而导致杂波功率谱在空时平面发生展宽;杂波功率受地面反射系数影响,而不同地貌杂波反射率也不相同。综上,在仿真产生训练数据集过程中,应分别考虑不同距离门、偏航角、阵元误差、杂波起伏和地貌影响。由于变化因素较多,不可能将上述所有情况遍历产生训练数据集。因此,本文采用随机生成的方式产生数据集,以尽可能涵盖各类情况。上述各因素具体设置如下:
(1) 距离门个数设定为Lr∈{1,2,...,Lrmax},且有

其中,Rmax为天基预警雷达可观测地面最大斜距

其中,Re为地球半径。
(2) 偏航角设定为θe∈[0,θe,max],其中θe,max为雷达位于当前卫星轨道上不同纬度时最大等效偏航角,且有
其中,ve为赤道上地球自转速度,θi为卫星轨道倾角。
(5) 地杂波后向反射系数为[45]

其中,θg为擦地角;σ0s为镜面反射系数;Δθ0为镜面反射区域角;γ表示与漫反射有关的系数,主要与当前地貌有关。
4 仿真分析
本节通过仿真实验验证所提CNN STAP方法性能,其中卫星和雷达系统参数见表1。根据表1参数可得最大距离门Lrmax=300,最大偏航角θe,max=3.63o。构造训练集时,最大阵元误差方差杂波起伏谱展宽最大方差0.05,共考虑海洋、沙漠、农田、丘陵、高山5种典型地貌。CNN网络参数fi×fi×ni分别设定为(11×11×16),(9×9×8),(7×7×4),(5×5×2)和(3×3×1),网络共训练300周期(Epoch),每批(Batch)采用10个数据进行训练。构造字典时,空时谱离散化因子ρs=ρd=4。
4.1 网络收敛性分析
本实验分析采用不同数目训练数据情况下的网络收敛性能,共包括I=200,I=400和I=600 3种情况,各情况均分别采用80%和20%数据用于训练和验证。图4为所提CNN网络训练收敛性对比图,其中图4(a)和图4(b)分别为迭代过程中网络训练和验证MSE曲线。可以看出随着训练数据的增加,网络训练时收敛性更快,MSE也更小;当训练至200次左右时,采用400个训练数据和600个训练数据两种情况均已实现收敛,且后者MSE略小于前者。因此,本文后续仿真实验均采用随机生成600个杂波空时快拍数据及其对应准确CCM数据构成训练数据集。
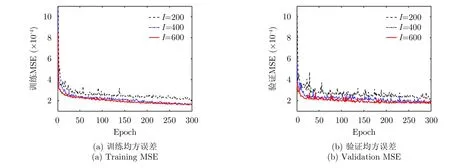
图4 网络训练收敛性分析Fig.4 Convergence analysis of our CNN
4.2 高分辨空时谱对比
本实验主要对比采用不同方法重构高分辨空时谱结果,所涉及方法包括FOCUSS STAP[31]、SBL STAP[35]和本文所提CNN STAP。3种方法均采用4个待检测距离门相邻空时快拍数据作为训练样本进行超分辨空时谱重构。观测数据仿真参数设定为和农田地貌。其中,FOCUSS STAP和SBL STAP参数设置分别与文献[31]和文献[35]一致。
图5为采用上述各方法估计杂波空时谱对比结果。其中,图5(a)为确知CCM采用MVDR谱估计方法所估空时谱,其对应近似真实高分辨谱并作为参考标准;由图5(a)可以看出,空时平面上主要由主瓣杂波和少量副瓣杂波构成,与图2(a)理论空时谱线相比缺少了多次多普勒折叠杂波。这是由于LLSBR天线孔径较大,其接收端平均副瓣电平衰减达50 dB以上,因此发生多普勒模糊的副瓣杂波功率较小。图5(b)—图5(d)分别为采用FOCUSS,SBL和CNN 3种方法所估空时谱。由图5(b)可以看出,采用FOCUSS方法所重构空时谱分辨率相对较差,导致其在多普勒副瓣和方位副瓣区域分别引入较多主瓣杂波;由图5(c)和图5(d)可以看出采用SBL和CNN方法均能较好地高分辨重构主瓣杂波,但由于副瓣杂波功率较弱而未能完全准确重构。
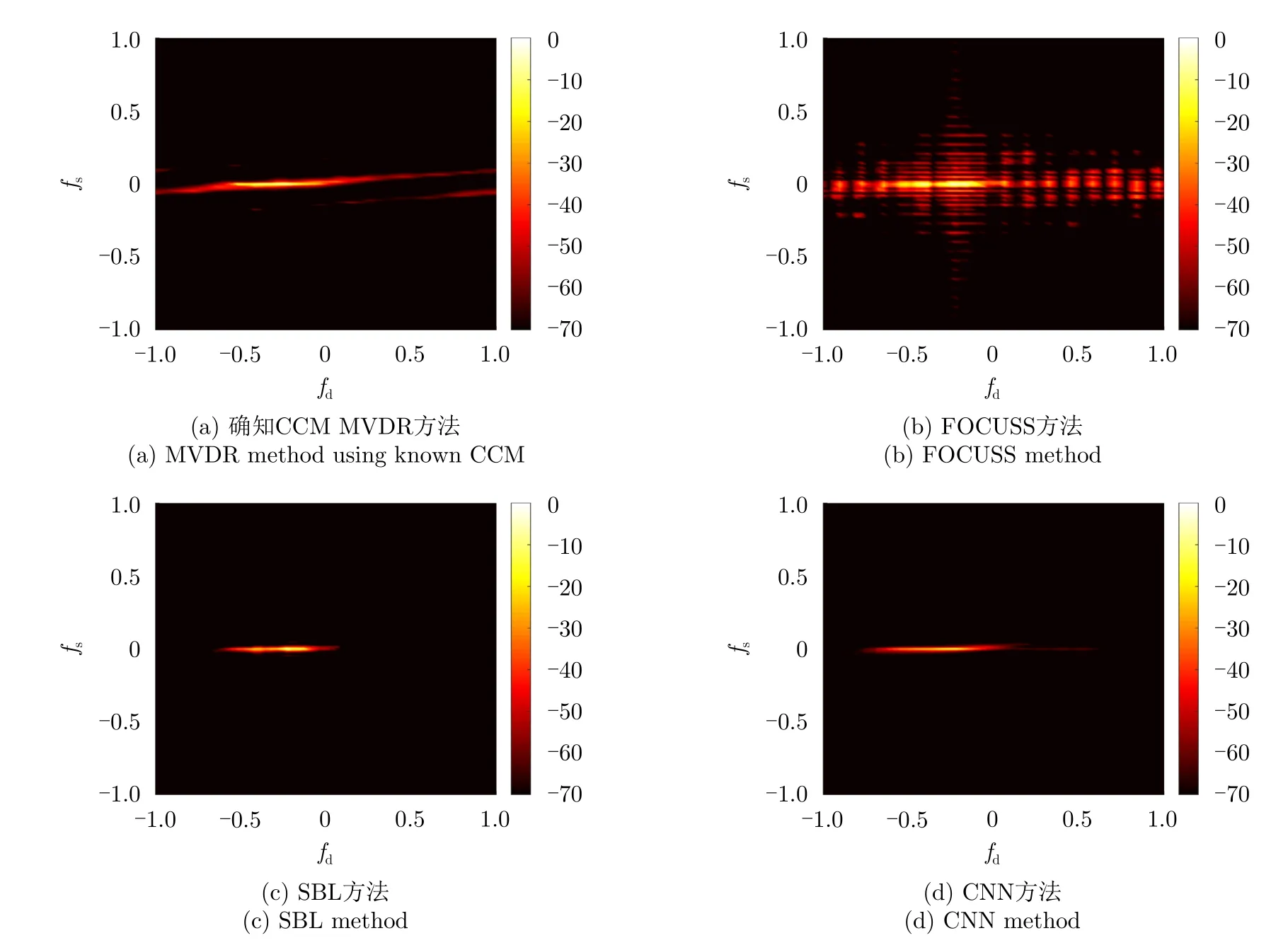
图5 高分辨空时谱对比结果Fig.5 Comparison of high-resolution angle-Doppler spectra
4.3 信杂噪比损失对比
本部分采用信杂噪比损失(SCNR Loss)作为测度来分析对比各方法的杂波抑制性能。SCNR Loss定义为
这里分别采用最优(Optimum,OPT) STAP、联合局域法(Joint Domain Localized,JDL)STAP、多普勒通道联合处理(Multiple Doppler channels joint processing scheme,mDT) STAP,FOCUSS STAP,SBL STAP与本文所提CNN STAP方法进行对比。其中,OPT STAP采用确知CCM计算空时权系数,以提供性能上限;JDL STAP方法空域波束和多普勒通道均取3,训练样本数取60;mDT STAP方法取相邻3个多普勒通道参与自适应处理,训练样本数取160;FOCUSS STAP和SBL STAP均为典型稀疏恢复类方法,训练样本数均取4。由于偏航角大小对杂波谱分布影响最大,因此本部分在限定其他杂波参数情况下比较不同偏航角情况下的杂波抑制性能。此外,观测数据仿真参数设定为和农田地貌,偏航角分别取θe={0.5o,1.5o,2.5o,3.5o}4种情况。
图6为各方法信杂噪比损失曲线对比结果。其中,图6(a)—图6(d)分别对应等效偏航角为0.5°,1.5°,2.5°和3.5° 4种情况。由图6可以看出:(1)无论在何种偏航角情况下,所提CNN STAP性能均略差于SBL STAP,同时两者性能显著优于FOCUSS STAP,均可达次最优水平;(2)随着偏航角增大,传统JDL STAP和mDT STAP性能急剧下降,这是由于偏航角越大,训练样本非平稳性越强;(3)随着偏航角增大,各方法主瓣杂波区抑制性能明显变差,这是由于偏航角增大导致各次距离模糊杂波分布特性差异变大,特别是多次距离模糊主瓣杂波在多普勒上无法重叠而引起主瓣杂波严重展宽。

图6 各方法信杂噪比损失曲线对比Fig.6 Comparison of SCNR Loss curves
4.4 方法稳定性分析
本实验主要对比FOCUSS STAP,SBL STAP和CNN STAP 3种方法高分辨空时谱重构稳定性。基于本文仿真模型和参数随机生成500个空时快拍数据作为观测数据,测试指标为相对平均SCNR Loss,即各方法SCNR Loss算术平均值与OPT STAP方法SCNR Loss算术平均值之差。该指标数值越大,说明方法性能越差,越不稳定。
图7为3种方法分别对观测数据处理后相对平均SCNR Loss对比结果。可以看出,FOCUSS STAP方法整体损失最大,且损失较大的数据占比最高,说明该方法空时谱重构稳定性最差;CNN STAP方法在各数据的相对平均SCNR Loss略大于SBL STAP方法,同时损失较大数据也多于后者,这说明CNN STAP方法稳定性要略差于SBL STAP方法。
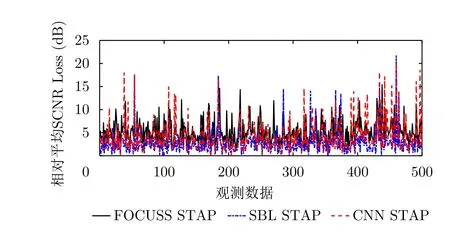
图7 相对平均SCNR Loss对比结果Fig.7 Comparison of relative average SCNR Loss
为更直观定量对比上述3种方法的高分辨谱估计稳定性,本文在表2给出各方法在不同相对平均SCNR Loss约束下所对应数据占比情况。可以看出,以OPT STAP方法性能为参考基准,FOCUSS STAP方法中损失小于3 dB的数据仅占比35%,而CNN STAP和SBL STAP方法中数据占比分别达73.6%和85.2%;当损失约束为小于5 dB时,CNN STAP方法数据占比升至84.8%,但仍低于SBL STAP方法的90.0%;当进一步放松损失范围至9 dB时,CNN STAP和SBL STAP方法数据占比均增至95%以上,同时FOCUSS STAP方法数据占比也增至约95%。

表2 稳定性分析Tab.2 Stability analysis
4.5 运算复杂度分析
深度学习在网络训练过程中耗时较多,但该部分工作在线下完成。一旦网络训练好,在线运算只包括矩阵和矢量的乘法和加法运算实现超分辨空时谱估计,而无须复杂迭代优化过程,因此运算量较小。对于CNN,其运算复杂度公式为

其中,L表示CNN网络层数,fl表示第l层网络卷积核维度,nl表示第l层网络卷积核个数。将本文所设置网络参数代入式(27),可得CNN STAP方法谱估计过程运算复杂度。
考虑到FOCUSS STAP,SBL STAP和CNN STAP 3种方法运算复杂度的差异性在于空时谱估计环节,因此表3分别给出上述3种方法的空时谱估计运算复杂度对比结果。其中,kFOC和kSBL分别表示FOCUSS STAP方法和SBL STAP方法迭代次数。
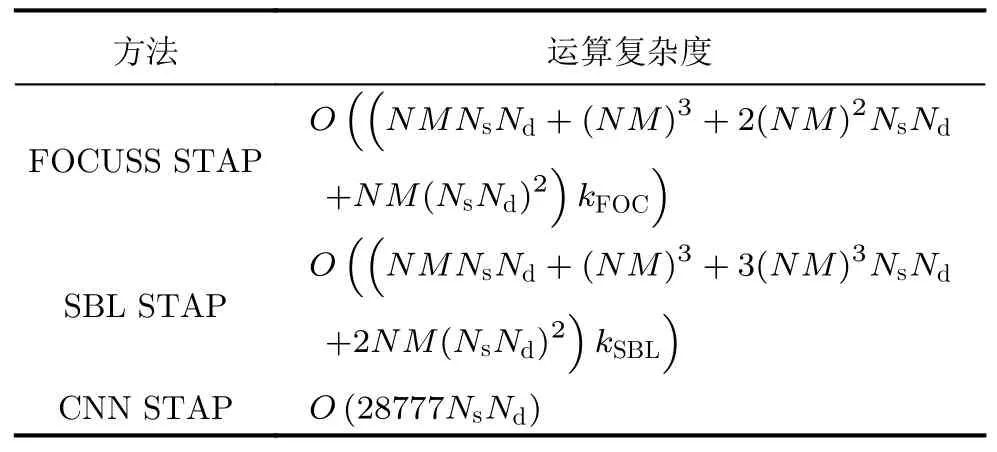
表3 运算复杂度分析Tab.3 Analysis of computational complexity
图8给出了上述3种方法更为直观的运算复杂度对比结果。其中,空域阵元数取值范围为5~80;为方便比较,时域脉冲数始终保持与空域阵元数相等。由图8可以看出,SBL STAP运算复杂度略大于FOCUSS STAP,两者运算复杂度远大于CNN STAP。按照本文LLSBR仿真参数,即N=32时,SBL STAP和FOCUSS STAP运算量较CNN STAP方法高近4个量级;而当N增大至48时,CNN STAP运算量较其他两种方法低约5个量级。
表4给出了本文参数设置情况下FOCUSS STAP,SBL STAP和CNN STAP的计算机运行时间,所用CPU配置为Intel(R) Core i7-8550 1.80 GHz。运行时间取单个距离门杂波空时谱估计所消耗时间。由表4可以看出,在本文仿真参数条件下,FOCUSS STAP和SBL STAP方法的在线运行时间较CNN STAP在线运行时间高约4个量级,这也与图8的分析结果一致。此外,尽管CNN STAP离线运算耗时较长,但其用于网络离线训练,因此并不影响其实时谱估计处理速度。可见,所提深度学习STAP方法在线运行时间远低于已有稀疏恢复类STAP方法,因此更适用于天基预警雷达实际工程应用。

图8 运算复杂度对比结果Fig.8 Comparison of computational complexity

表4 运行时间比较Tab.4 Comparison of running time
5 结论
针对天基预警雷达杂波抑制难题,本文首次给出了基于深度学习的STAP架构,并在此基础上提出一种基于CNN的STAP方法。所提方法基于仿真数据对所构建CNN进行离线训练,使其具备低分辨空时谱到高分辨空时谱估计功能,然后将该网络用于小样本观测数据在线高分辨谱估计处理,最后利用所得高分辨谱构造空时自适应滤波器进行杂波抑制处理。仿真实验验证了所提CNN STAP方法性能接近SBL STAP方法,但其在线运算量远远低于后者,因此更接近实际工程应用。
由于本文所构造网络较为简单,对应CNN STAP方法杂波抑制性能略差于已有SBL STAP方法。未来工作中,本团队拟结合天基预警雷达信号特点,更具针对性地构造复杂神经网络进行空时谱估计,进一步提升该类方法杂波抑制性能。此外,本团队拟考虑更多实际应用中相关要素完善训练数据集,以提升网络泛化能力。这些要素包括但不限于不同载频、不同重频、不同扫描波位、各类有源电子干扰、强散射点干扰目标和功率非均匀杂波。需要注意的是,本文所提方法主要提升了小样本条件下副瓣杂波抑制能力,但对于多次模糊主瓣杂波并无明显得益。因此,如何抑制模糊主瓣杂波以提升天基预警雷达动目标最小检测速度(Minimum Detectable Velocity,MDV)性能值得进一步研究。
