分布式MIMO雷达时间与阵面资源自适应调度算法
2022-06-29杨力萍廖可非欧阳缮
杨力萍,廖可非,2,欧阳缮,2*
(1.桂林电子科技大学 信息与通信学院,广西 桂林 541004;2.桂林电子科技大学 卫星导航定位与位置服务国家地方联合工程研究中心,广西 桂林 541004)
0 引言
现代雷达信息化作战中,存在海量任务和防空反导反隐身等一系列问题。前者导致资源的耗费远超雷达的承载范围,后者迫使雷达体制不断创新。因单基地雷达成像受到目标运动的限制,即目标相对雷达无转动时,单基地雷达无法完成目标的二维成像,而双、多基地成像可以很好地克服该限制。因此,引入分布式多输入多输出(Multiple-Input Multiple-Output,MIMO)雷达新体制,对完成多成像任务背景下雷达资源的优化管理具有重要意义[1-5]。
雷达成像资源有很多种类,如阵面(孔径)、频谱和脉冲(时间)等,对雷达成像资源的调度主要是针对这些不同种类的资源展开[6-7]。文献[8]结合压缩感知(Compressed Sensing,CS)理论使得脉冲资源得以稀疏化,为雷达时间资源的调度奠定了基础,并完成了时间资源的一维调度。文献[9]在CS理论的基础上,结合脉冲交错的调度方法,解决了脉冲等待时间过长的问题,进一步节省了时间资源。文献[10-12]针对阵面资源的调度,采用孔径分割技术完成多任务的并行执行,充分利用了雷达的阵面资源。文献[13]提出了基于时间—孔径二维资源管理的雷达资源调度算法,将资源调度提升到二维。然而,以上研究仅考虑单站雷达成像的模式,未考虑分布式MIMO雷达体制下的资源调度。
单站雷达受观测角度的限制,往往只能完成目标的二维成像。分布式MIMO雷达可获得目标多向散射特性,可作为突破单站雷达性能瓶颈的途径,进而完成目标的三维成像。文献[14]针对分布式MIMO雷达成像任务,建立了评价三维目标成像资源分配的投影融合模型,并在此基础上完成了分布式MIMO雷达的雷达选取与时间资源调度,提高了雷达的工作效率。文献[15]将分布式MIMO雷达的资源调度扩展到二维,完成了时间与阵面资源的二维调度,进一步提升MIMO雷达的资源利用率。以上工作虽然在分布式MIMO雷达体制下展开,但是只考虑了系统内单部雷达的自发自收模式,没有针对多发多收模式展开研究,忽略了分布式MIMO雷达的最大优势。
因此,针对多发多收的分布式MIMO雷达工作模式,本文结合阵面分割技术,提出了分布式MIMO雷达时间与阵面资源自适应调度算法。该算法首先根据目标特征认知结果完成威胁度计算和雷达选取。其次,建立资源消耗最少、任务调度最多的资源调度模型,并利用启发式算法求解该模型。相对现有算法可实现分布式MIMO雷达更为高效的资源调度,并扩大了雷达群可执行任务的容量。
1 分布式MIMO雷达成像模型
分布式MIMO雷达系统强调各接收通道的广域分布,可完成目标多向散射特性的观测。文献[16]指出,单部雷达对目标的成像仅在二维平面,为实现目标的三维成像,至少需要3部雷达对该目标进行成像并完成图像融合。综上,本文根据三维成像需求建立如图1所示的分布式MIMO雷达系统模型。若考虑同一时刻多部雷达发射,则需要考虑发射信号间的规避与分离问题。为减少系统内信号的相互干扰,本文对目标的成像将采用同一时刻单部雷达发射、3部雷达接收的工作模式。若考虑3部以上的雷达接收信号,则可在本文的优化模型上增加接收雷达个数进行拓展。
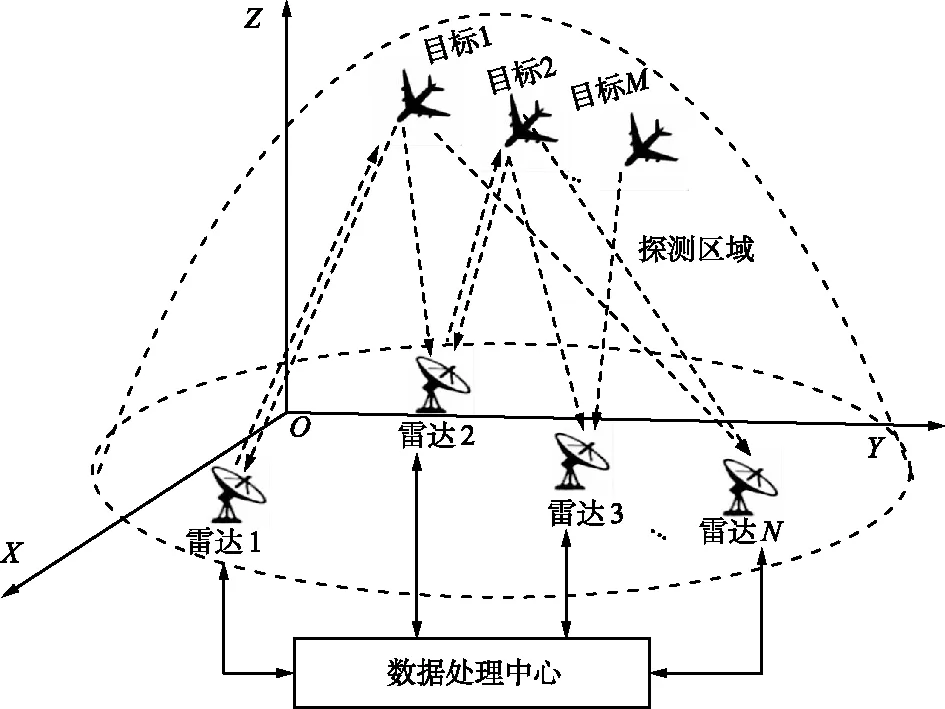
图1 分布式MIMO雷达系统模型Fig.1 Distributed MIMO radar system model
实际场景中,具有成像需求的目标数量M远多于雷达数量N,雷达面临同时对多个目标成像的问题。对于海量的任务,雷达采用单波束的工作方式在时间上交错观测已不再适用。因此,通过阵面分割形成多波束为多个目标的同时观测提供了可能。
对分布式MIMO雷达成像的分辨率进行分析,将成像任务投影到目标与双站雷达所在的二维平面,如图2所示。
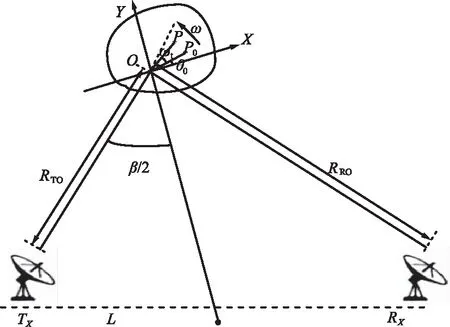
图2 双基投影成像几何结构Fig.2 Geometry of bibasic projection imaging
图2中,TX为发射站,RX为接收站,L为基线,β为双基地角。本文以双基地角平分线为y轴建立坐标系,目标以角速度ω匀速转动,发射站和接收站与目标中心的距离分别为RTO和RRO。
初始时刻,散射点位于P0(x0,y0)与目标中心O的连线相对于方位向的夹角为θ0。则t时间后,该散射点位于P(x,y)与雷达的距离Rp(t)可以表示为:
(1)
因此,方位向分辨率可以表示为:
(2)
式中,Tc为方位向相干积累时间;λ为信号的波长。
此外,双站雷达的距离向分辨率不仅与发射带宽B有关,还受空间位置影响,文献[17-18]给出了双站雷达的距离向分辨率表达式:
(3)
对比文献[19]中单站雷达的成像分辨率可知,双站雷达的成像分辨率相对单站雷达有一定衰减。因此,本文在分布式MIMO雷达成像任务的规划中将此衰减因素也考虑进雷达的选取。
2 雷达选取与阵面资源分配
对于分布式MIMO雷达系统,不仅要考虑任务的分配问题,还要考虑收发雷达的选取问题。对于每部雷达,为实现多任务的并行执行,需要对雷达阵面进行分割,形成多波束指向不同的任务目标。因此,在完成目标与收发雷达的匹配后,再自适应地分配各雷达的阵面资源,可实现更高效的系统资源管理。
2.1 雷达选取
不同雷达对同一目标的成像效果可能大有不同,例如某些目标的雷达散射截面积(Radar Cross Section,RCS)可能在某些观测角度表现微弱甚至无法成像。针对此类情况,就需要根据目标特征认知结果筛选、剔除掉在特定环境下的劣质雷达,选择优质雷达来完成目标的成像,即完成目标任务的优化分配。结合资源调度的原则和分布式MIMO雷达成像模型,为了保证系统对目标的持续稳定成像,在进行多雷达多目标分配时,应综合考虑夹角、有效方位向相干积累时间和双基地角3个因素。不失一般性的分析,雷达的单站模式可看作双基地角为0的双站模式。综上,本文定义雷达j对目标i成像的效能函数为:
(4)
式中,αi,j为雷达发射站与目标的视线方向与阵面法线方向所成的角度;Ti,j为有效的方位向相干积累时间;βi,j为双基地角。
单部雷达对目标的成像是二维的,且成像效果与效能函数成正比。已知不同角度的二维像可通过图像信息融合获得目标的三维像。因此,雷达系统可以根据效能函数值由大到小为每个目标选取3部不共线的雷达完成该目标的三维像。然后,在已选取的3部雷达中选择距目标最近的雷达作为发射雷达。
2.2 阵面资源分配
阵面分割是实现多波束常用的方法之一,主要包括均匀分割与非均匀分割。为简化分析,本文以雷达阵面均匀三等分为基础,先对多目标任务按需分配阵面资源,再结合实际阵面的分割做出调整,最后的阵面资源分配情况如表1所示。各雷达再根据表1形成相应数量和能量的波束进而完成多任务的并行执行。
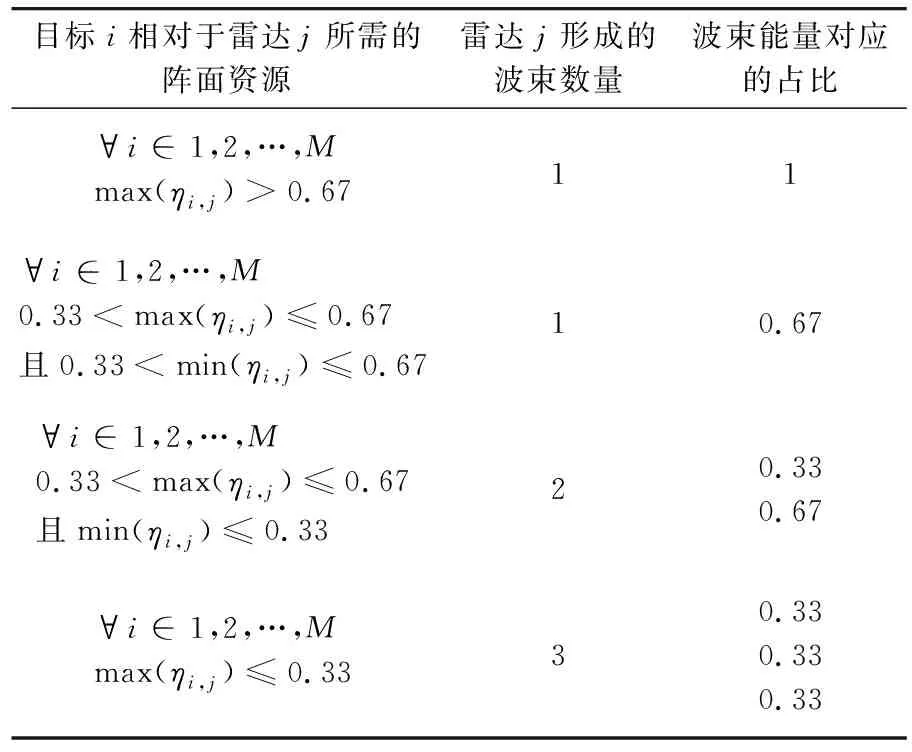
表1 按需分配阵面资源的4种情况Tab.1 Four cases of array resources allocation on demand
表1中,ηi,j为雷达j对目标i观测时预分配的阵面资源。波束能量对应的占比总是小于等于1,原因在于雷达子阵面形成的波束相对于未做阵面分割形成的波束在能量上有所衰减。
阵面均匀三等分与未做阵面分割的雷达波束方向图对比如图3所示。
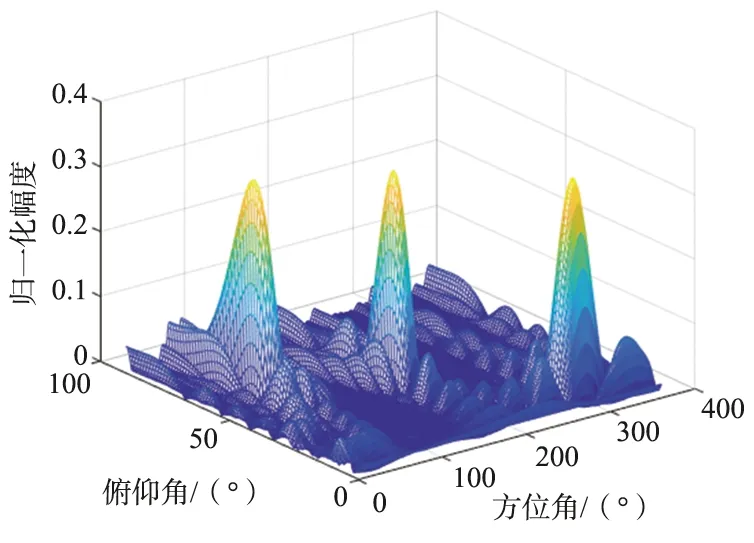
(a) 阵面均匀三等分的波束方向图
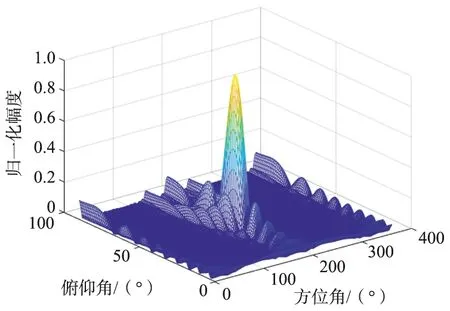
(b) 未做阵面分割的波束方向图图3 波束方向图对比Fig.3 Beam pattern comparison
事实上,波束的增益与其最大作用距离有着必然联系,根据目标与雷达的距离按需分配雷达的阵面资源是一种高效使用阵面资源的方法,即当目标i相对于雷达j的距离为Ri,j时,该目标分配的阵面资源为:
(5)
式中,Rjmax为雷达j单波束模式下的最大成像距离。
3 多波束成像任务调度模型
在雷达信号的脉宽和脉冲重复周期确定的情况下,一个调度间隔内能处理的最大脉冲数量就随之确定。因此,对时间资源的调度可转化为对有限观测脉冲数量的管理。此外,通过阵面分割技术将雷达阵面分割成多个子阵面,每个子阵面可形成波束进而独立执行不同的任务,使雷达的多任务并行执行能力得到提高。因此,在雷达多波束成像的过程中,建立时间—阵面源消耗最少、任务调度成功率最高的资源调度模型对进一步提高雷达工作效率有重要意义。
3.1 目标特征认知
系统内各部雷达对其探测区域内所有目标发射少量脉冲并接收目标回波。通过雷达常规算法得到目标的具体信息,主要包括目标i到雷达j的距离Ri,j、目标速度Vi、目标速度与雷达j方位向夹角θi,j和雷达目标视线方向与阵面法线方向的夹角αi,j。
根据文献[8]所提方法进行粗分辨成像,估算出目标方位向投影尺寸si,j、方位向稀疏度Ki,j,则有效方位向相干积累时间Ti,j可表示为:
(6)
式中,Sref为目标方位向基准尺寸;ρref为方位向基准分辨率。这也体现了成像分辨率的自适应调整,投影尺寸大的目标可以适当降低分辨率,投影尺寸小的目标适当提高分辨率。
由CS理论可知,观测维数会影响重构的目标成像结果,为了高概率重构出原始信号,雷达j对目标i的观测维度Mi,j需满足:
Mi,j≥c1Ki,jln(PRF·Ti,j),
(7)
式中,c1是一个与恢复精度有关的常数,通常取0.5~2;PRF为脉冲重复频率。
距离近、速度快、面向雷达运动的目标更具威胁度[20]。因此,目标威胁度的计算主要考虑目标到雷达的距离Ri,j、目标速度Vi和目标速度与成像方位向夹角θi,j三个因素,将目标i对雷达j的威胁度定义为:
(8)
式中,ω1,ω2,ω3可根据文献[20]所提方法计算。
3.2 性能指标
结合图1可知,系统由N部雷达组成,有成像需求的目标总数为M。为了更好地分析算法的可行性,定义如下3个性能指标:
① 时间资源占用率(Occupancy Rate of Time Resources,ORTR):调度间隔T内,收发雷达消耗的时间资源与系统所能提供的总时间资源之比,可以表示为:
(9)
式中,Xti,j为系统的发射雷达选取值,值为1则雷达j对目标i进行观测,否则值为0;Xri,j为系统的接收雷达选取值。
② 阵面资源占用率(Occupancy Rate of Array Resources,ORAR):调度间隔T内,收发雷达消耗的阵面资源与系统所能提供的总阵面资源之比,可以表示为:
(10)
式中,η′i,j为雷达j实际分配给目标i的波束资源;X′ri,j为各雷达实际完成成像的情况,值为1则雷达j对目标i完成观测,否则值为0。
③ 成功率(Success Rate of Task Scheduling,SRTS):调度间隔T内,完成三维成像的目标数量与系统内有成像需求的总目标数量之比,可以表示为:
(11)
式中,m′为完成三维成像的目标数量。
3.3 多波束成像任务调度模型
在雷达多波束成像的过程中,以消耗资源最少、调度成功率最高为目标函数建立多波束成像调度模型,如下所示:
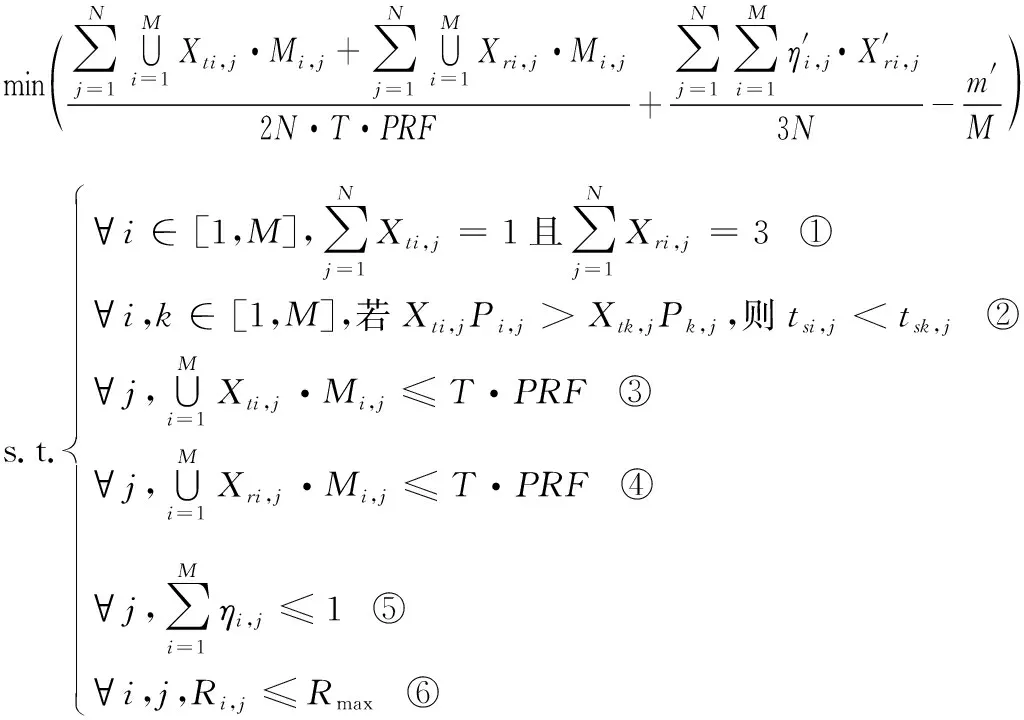
(12)
式中,约束条件①表示分布式MIMO雷达对目标的三维成像至少需要3部雷达,为节省发射脉冲资源,减少回波之间的相互干扰等因素,本文仅选择1部发射雷达。约束条件②规定了在同一部雷达执行任务时,威胁度大的任务优先执行。约束条件③和④是确保所选的资源分配策略中,各雷达可使用的时间资源不能超过系统能提供的极限。同理,约束条件⑤确保各雷达可使用的阵面资源不能超过系统能提供的极限。约束条件⑥约束所有雷达对目标成像的距离均不超过其最大子阵面的最大成像距离。
3.4 算法描述
根据式(12)的优化模型可知,本文的资源调度算法属于NP难题,一般可采用启发式算法求解出该优化问题的可行解,算法流程如图4所示。
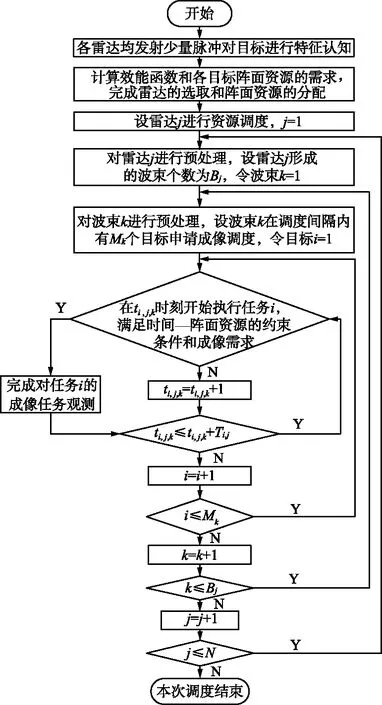
图4 算法流程Fig.4 Algorithm flow chart
本文算法的具体步骤描述如下:
① 系统内N部雷达对其探测区域内所有目标发射少量脉冲并接收目标回波,通过特征认知得到目标i到雷达j的距离Ri,j、目标速度Vi、目标速度与雷达j方位向夹角θi,j和雷达目标视线方向与阵面法线方向的夹角αi,j。再结合式(4)和式(5)完成雷达的选取和各雷达阵面资源的分配。
② 令起始雷达j=1;
③ 对雷达j进行调度预处理,假设雷达j形成的波束个数为Bj,令波束k=1;
④ 对波束k进行调度预处理,假设波束k的一个调度间隔内有Mk个目标申请成像调度,将目标按优先级Pi,j大小顺序加入申请列表,令目标i=1;
⑤ 依次取出目标i,将当前调度间隔内剩余空闲时刻中最靠前的时刻作为目标的初始观测时刻ti,j,k,再根据目标的有效方位向相干积累时间Ti,j计算得到目标i的最终观测时刻Ti,j+ti,j,k;
⑥ 判断目标i的请求是否满足时间—阵面资源的约束和成像需求。若满足约束和需求,则在目标i的起止观测时刻之间随机的插入Mi,j-2个观测脉冲,并令当前目标i=i+1;若不满足,则并令当前目标i=i+1;
⑦ 判断当前目标请求序列是否为空。若i≤Mk,则返回⑤;若i>Mk,则k=k+1。接着判断波束是否完成遍历,若k≤Bj,返回④;若k>Bj,则j=j+1。最后判断系统内的雷达是否完成调度,若j≤N,返回③,否则结束本次调度间隔的处理。
4 仿真实验与结果分析
设各部雷达时间同步且均发射线性调频信号,信号载频fc=10 GHz,脉宽Tp=1 μs,带宽B=300 MHz,脉冲重复频率PRF=1 000 Hz,调度间隔T=1 s。场景1中雷达的三维坐标信息和目标信息分别如表2和表3所示。
为验证分布式MIMO雷达时间与阵面资源自适应调度算法的可行性,首先对4部雷达6个成像目标的场景1进行仿真。场景1中雷达的三维坐标信息和目标信息如表2和表3所示。
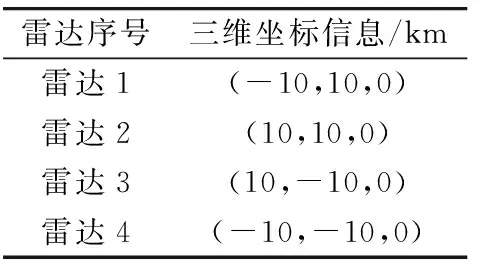
表2 场景1中雷达的信息Tab.2 Radar information in Scene 1
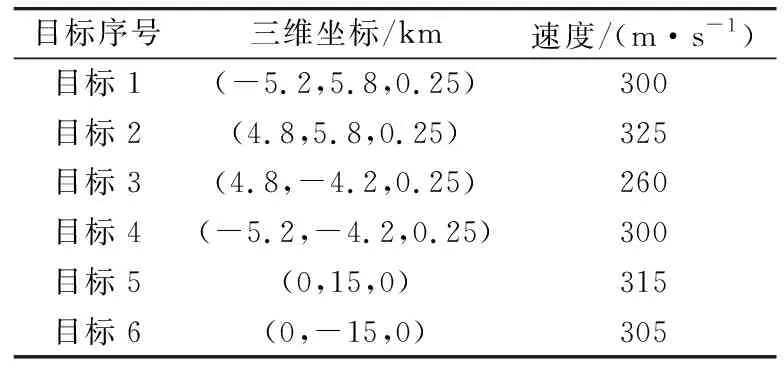
表3 场景1中目标的信息Tab.3 Target information in Scene 1
场景1中雷达与目标距离如表4所示。

表4 场景1中雷达与目标距离Tab.4 Distance between radar and target in Scene 1 单位:km
场景1中目标分配的效能函数如表5所示。
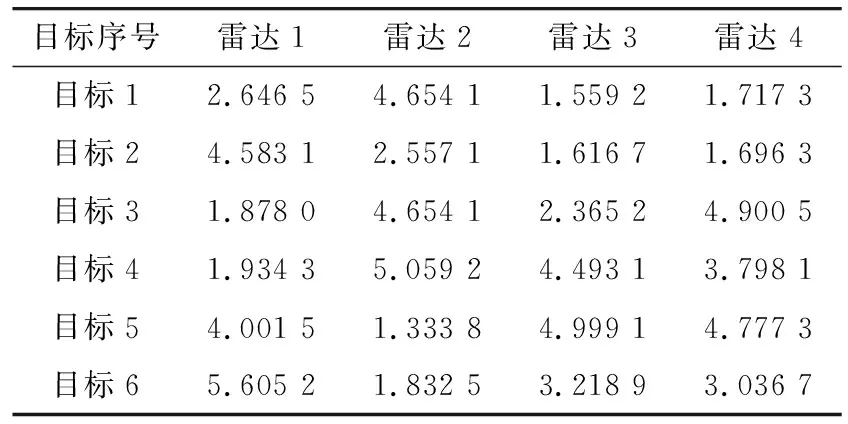
表5 场景1中目标分配的效能函数Tab.5 Effectiveness function of target allocation in Scene 1
根据表5中效能函数的值,可以为各目标分配3部雷达,即完成接收雷达的选取,进而完成目标的三维成像。接收雷达选取矩阵如表6所示,结合表4可得到发射雷达选取矩阵。
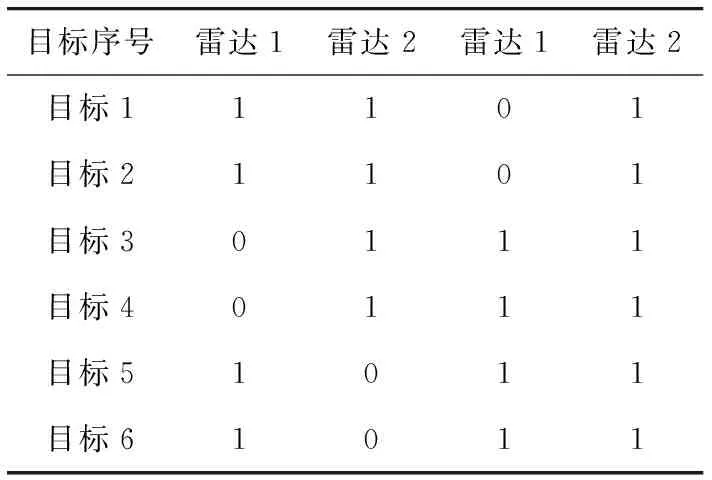
表6 场景1中接收雷达选取矩阵Tab.6 Selection matrix of receiving radar in Scene 1
取值为1,意味着对应行的目标分配给对应列的雷达执行。各目标对各雷达的威胁度如表7所示,对于确定的某部雷达,威胁度越大的目标越应该优先执行。
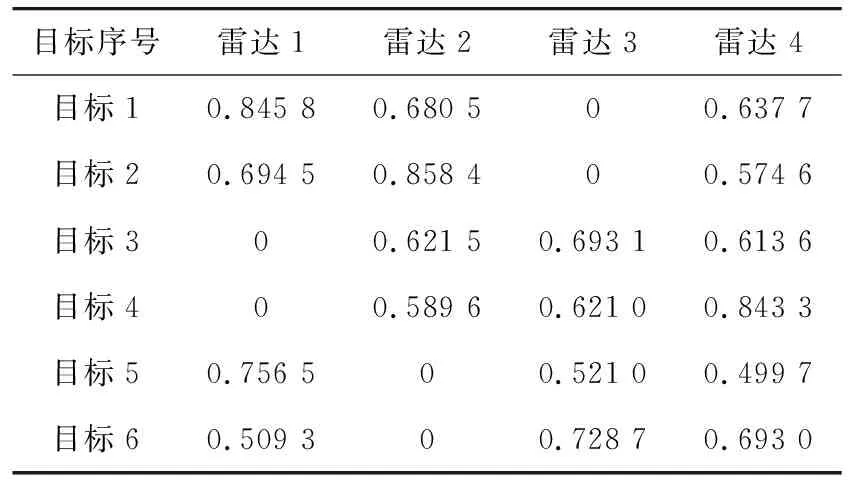
表7 场景1中各目标对各雷达的威胁度(已做目标分配)Tab.7 Threat degree of each target to each radar in Scene 1 (target allocation has been made)
为了验证本文所提算法的可行性,对场景1进行仿真,可以得到雷达阵面资源分配和调度间隔内各雷达成像任务的执行时序,如图5和图6所示。
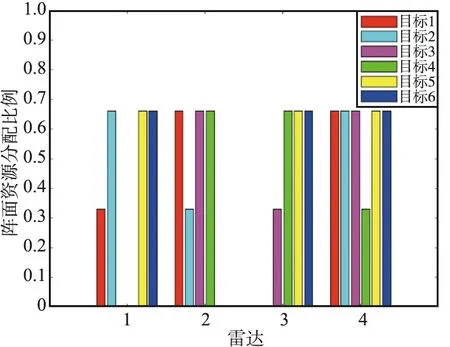
图5 调度间隔内多任务的阵面资源分配Fig.5 Array resource allocation of multiple tasks in scheduling interval
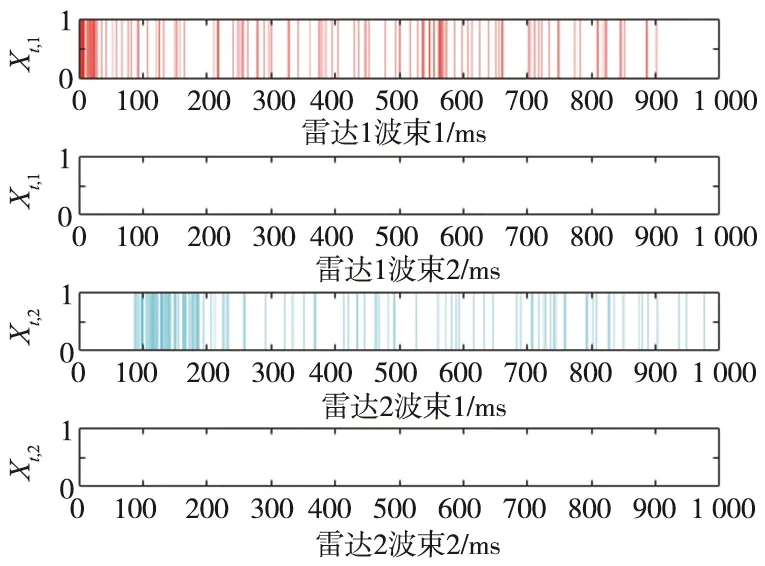
(a) 雷达1和雷达2的发射时序图
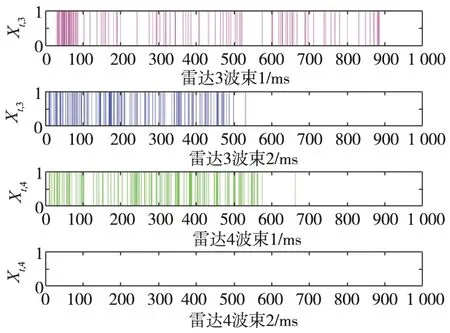
(b) 雷达3和雷达4的发射时序图
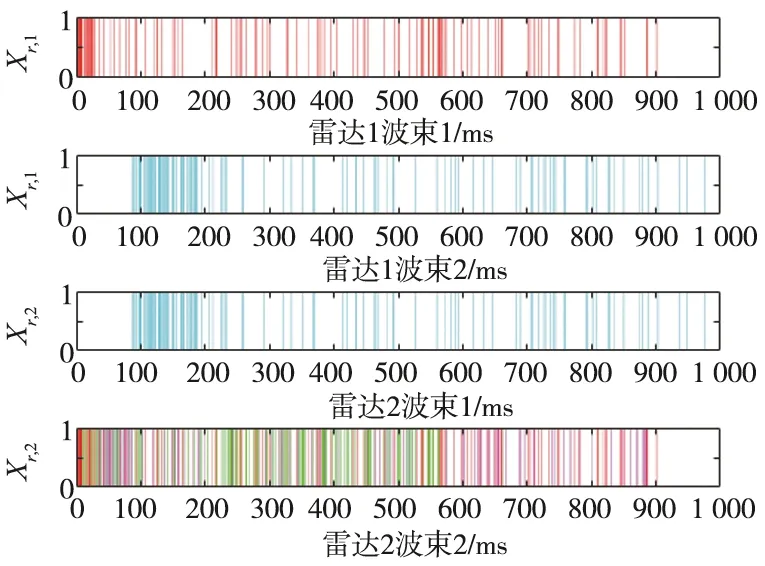
(c) 雷达1和雷达2的接收时序图
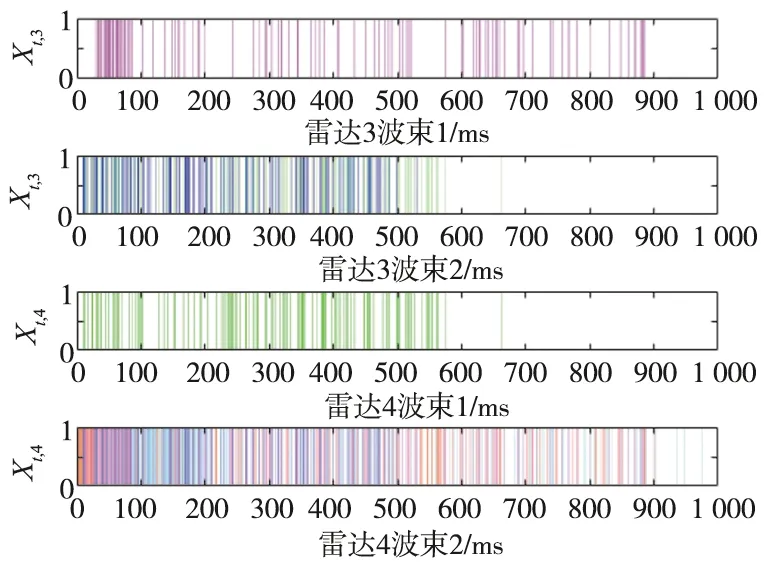
(d) 雷达3和雷达4的接收时序图图6 调度间隔内各雷达成像任务执行时序图Fig.6 Execution sequence diagram of each radar imaging task in scheduling interval
图6中调度间隔T=1 s,脉冲重复周期PRT=1 ms,Xti,j为组网发射雷达的取值,值为1则雷达j对目标i进行观测,否则值为0,Xri,j为组网接收雷达的取值。
仿真场景2为5部雷达和20个成像目标。场景2是在场景1的基础上,在(0,0,0)处增加了1部雷达,场景2中目标信息如表8所示,其余参数与场景1类似,便不再一一列出。

表8 场景1中目标的信息Tab.8 Target information in Scene 1
为了验证本文所提算法的有效性,将其与常规组网雷达成像资源调度算法(传统算法)[8]对比3个性能指标。再利用统计分析方法在场景2下进行1 000次蒙特卡洛实验,得到2种不同算法在不同目标数下的性能指标结果,如图7所示。
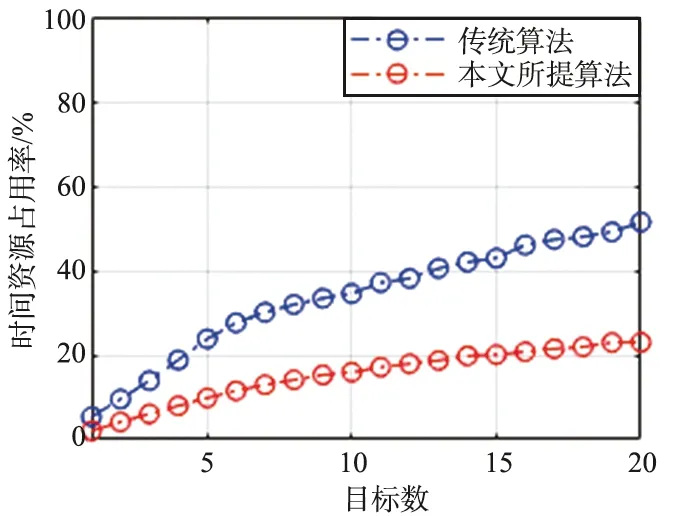
(a) 时间资源占用率
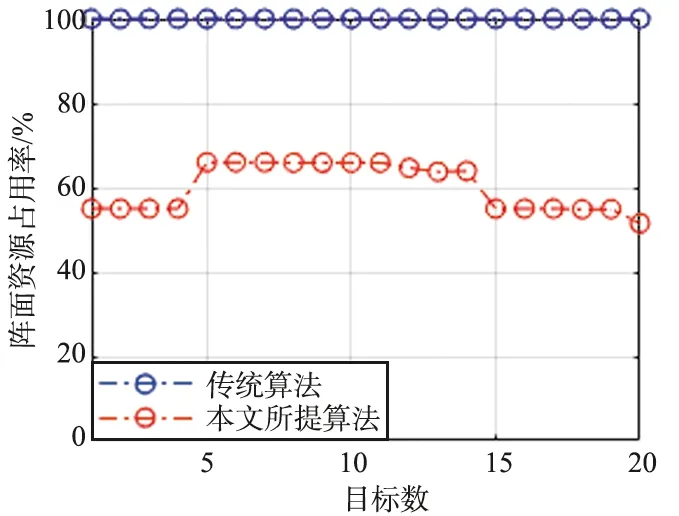
(b) 阵面资源占用率
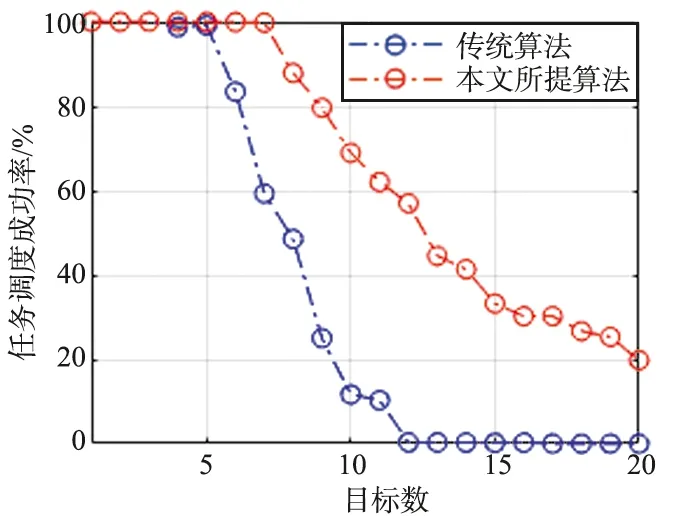
(c) 任务调度成功率图7 2种算法的性能指标比较结果Fig.7 Comparison results of performance indicators of the two algorithms
由图7(b) 可以看出,本文所提算法相对于使用100%阵面资源执行同一任务的调度算法(传统算法),可以节省约33%的阵面资源。由于场景参数的随机性和任务调度成功率的下降会导致目标数量大于14时,阵面资源占用率有所下降。事实上,阵面分割越细致,波束形成越灵活,节省的阵面资源会越多。节省的阵面资源可以执行其他任务,即多波束成像,为雷达的多任务并行执行奠定了基础,进而达到节省时间资源的目的。因此,出现了如图7(a)所示的结果,即本文所提方法可以节省50%左右的时间资源。最后,由于时间资源和阵面资源的相对富余,任务调度成功率也有所提高,如图7(c)所示。
5 结束语
针对多任务背景下组网雷达成像资源调度问题,提出了分布式MIMO雷达时间与阵面资源自适应调度算法。在保证成像质量的基础上,对组网雷达时间资源和阵面资源进行了二维联合自适应调度,达到了降低资源占用率和提高任务成功率的目的。在典型的多任务情况下,该算法可以节约50%的时间资源和33%的阵面资源,并大大提升任务调度的成功率。节省的资源可用于新的目标成像或其他作战任务,进而提高组网雷达的探测能力。
