天玑Ⅱ机器人辅助胸腰椎椎弓根螺钉内固定术的临床应用
2022-06-29阎凯张琦刘波何达刘亚军田伟
阎凯 张琦 刘波 何达 刘亚军 田伟
0 引言
胸腰椎椎弓根螺钉内固定术是脊柱外科最常用的内固定方法,它的作用包括提供早期稳定性、提高脊柱融合率与融合速度,以及矫正畸形等[1]。该术式中,螺钉置入位置准确与否很大程度上影响手术的效果。既往文献报道采用传统徒手方法置钉准确率差异较大[2-3],同时椎弓根螺钉位置不准确可能导致多种并发症,例如周围神经血管损伤、脑脊液漏、胸腹脏器损伤等[4-5]。为了提高胸腰椎椎弓根螺钉内固定手术中螺钉置入位置的准确性,已有多种骨科手术机器人系统用于临床手术[6]。天玑机器人系统作为我国自主研发的通用型骨科手术机器人,已在临床手术中取得了良好的手术效果[7-14]。在天玑机器人辅助胸腰椎椎弓根螺钉内固定术的临床研究中,螺钉置入位置优良率超过95%,螺钉平均偏差仅为1.5 mm[9]。但是,天玑机器人在人机交互、机器人操作等方面还需要依赖于手术台下的工作人员协助,易用性还有待于提高。因此,临床医生与工程师通过持续创新,推出了更易用、更高效的天玑Ⅱ骨科手术机器人系统。
天玑Ⅱ骨科手术机器人在2020~2021年期间开展了临床试验,并于2021年4月上市,但关于天玑Ⅱ机器人辅助胸腰椎椎弓根螺钉内固定术的临床研究尚未见报道。因而,本研究收集并分析了天玑Ⅱ机器人辅助胸腰椎椎弓根螺钉内固定术的病例,探讨天玑Ⅱ机器人在脊柱外科手术中的临床应用结果。
1 对象与方法
1.1 一般资料
本研究为前瞻性病例分析,经北京积水潭医院伦理委员会批准(积伦科审字第20191105号),患者或委托代理人均签署知情同意书。纳入标准:(1) 年龄 18 岁以上;(2) 符合接受手术条件的患者;(3) 患者签署知情同意书,同意参加本试验。排除标准:(1) 严重骨质疏松患者;(2) 患者或家属拒绝参与该研究者;(3) 临床机构认为不适宜受试的患者。
研究纳入了2020年12月至2021年5月期间在北京积水潭医院完成的天玑Ⅱ机器人辅助胸腰椎椎弓根螺钉内固定术,收集患者的临床资料。最终共纳入研究20例,其中男11例,女9例。年龄30~76(56±14)岁,体质指数(body mass index,BMI)(24.7±3.1) kg/m2。术前诊断为腰椎骨折2例,腰椎管狭窄症5例,腰椎滑脱症9例,腰椎间盘突出症4例。
1.2 天玑Ⅱ骨科手术机器人及其辅助手术方法
天玑Ⅱ骨科手术机器人由机械臂、主控工作站和红外相机三部分组成,它利用多自由度机械臂、导航定位、自动控制、先进传感器等新技术,为术者提供精确、稳定的定位,解决了传统骨科手术定位困难、主要依赖术者经验及术中透视等瓶颈问题[15]。天玑Ⅱ骨科手术机器人继承了上一代产品的精准优势,并通过以术者为中心的“智能手术舱”设计,使得手术流程更为高效流畅。新增加术者可直接操控的主控触屏和机械臂末端,帮助术者全面掌控手术,节约手术台下的人力成本;优化360°全向示踪,有助于应对各种手术位置,适应更多临床场景。
按照机器人辅助胸腰椎椎弓根螺钉置入手术指南进行手术[15]。全麻后,将患者俯卧于碳素手术床上,常规消毒铺单。使用C臂采集术区三维影像,随后将影像发送到机器人工作站,机器人工作站将完成自动配准。术者在机器人工作站的触屏上,根据三维图像进行螺钉的术中规划与设计,在相应手术节段上选择合适的螺钉直径、长度、入点和方向。术中规划完成后,机械臂将按照设计的螺钉位置,自动运行至置钉通道。机械臂运动到位后,将定位套筒放入机械臂引导器中,在套管接触皮肤的位置作一横行或纵行的小切口。机器人的定位精度将实时显示在工作站的操作界面和机械臂的末端指示器上,术者可根据机器人定位精度和术中动态环境对机械臂实时位置进行微调。沿着定位套筒将导针钻入椎弓根和椎体,依次置入规划的每枚导针后,通过三维扫描图像确认导针的位置。确认导针位置满意后,沿导针置入椎弓根螺钉,通过透视或三维扫描图像确认螺钉的位置。如螺钉位置满意,则可以将机器人系统撤离。

图1 天玑Ⅱ机器人辅助胸腰椎椎弓根螺钉内固定术Figure 1 2nd generation TiRobot-assisted thoracolumbarpedicle screw fixation
1.3 评价指标
(1) 导针偏差。导针偏差指规划的导针位置与实际导针的置入位置偏差,具体计算方法为:术中导针规划位置与实际位置的入点和止点距离偏差(图2)以及路径方向(图3)分别在轴位和矢状位上的偏差。为进行同一平面的比较,通过TiRobot规划软件将规划锥形束投照计算机重组断层影像(cone beam computed tomography,CBCT)图像和导针置入验证的CBCT图像进行图像融合处理,实现同一坐标系下的精度计算[12]。
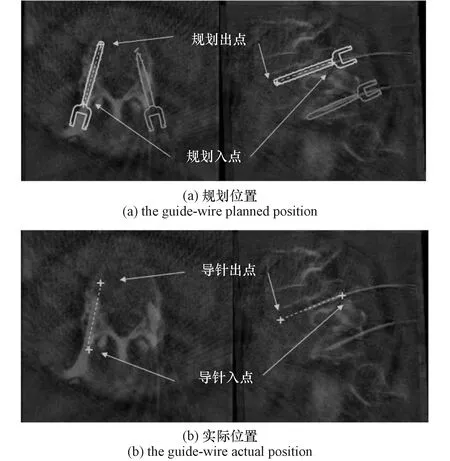
图2 导针规划位置与实际位置的入点和止点距离偏差测量Figure 2 Distance deviation of the entry point andthe end point between the planned position and theactual position of guide-wire
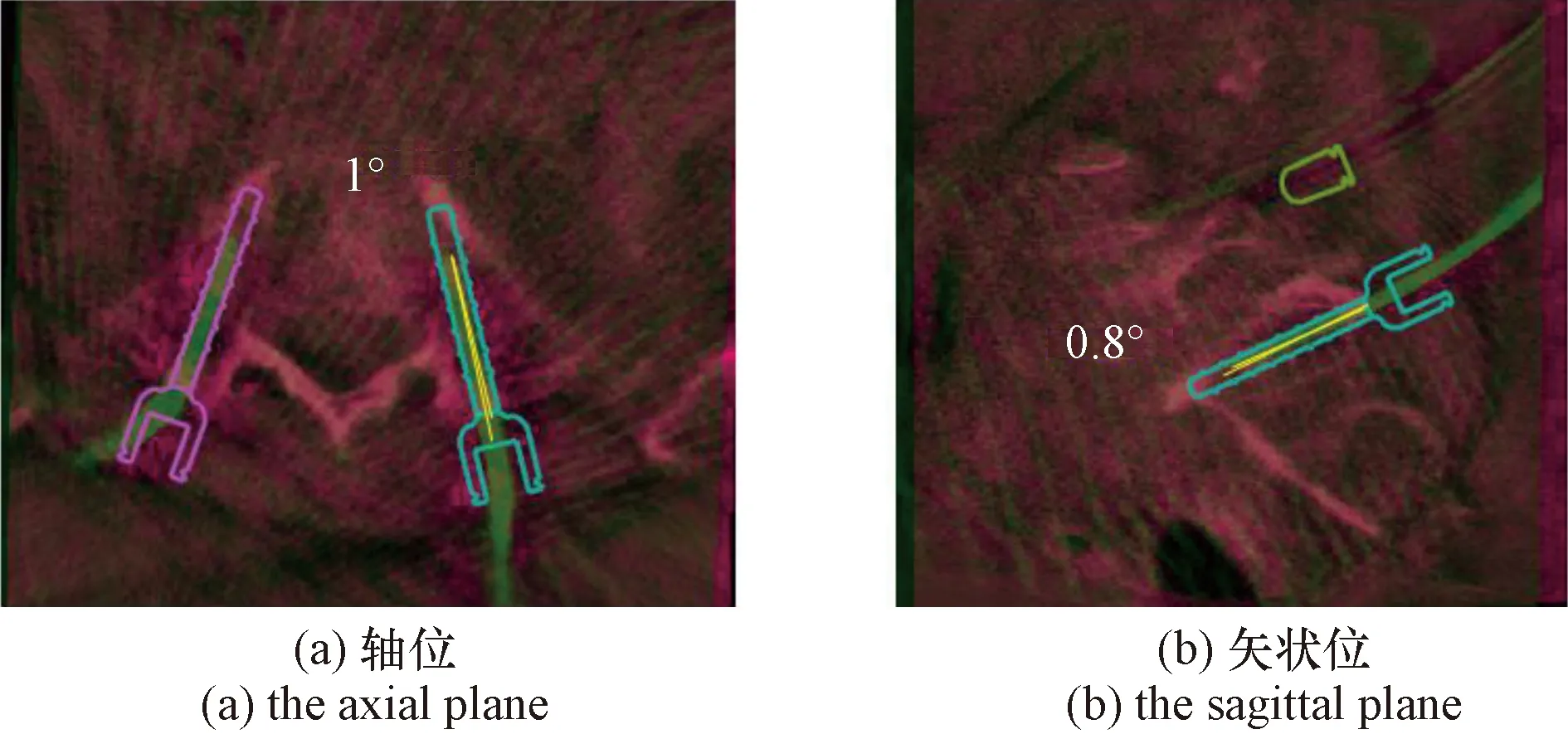
图3 导针规划位置与实际位置的方向偏差测量Figure 3 Angular deviation between the planned position and the actual position of guide-wire inthe axial and sagittal planes
(2) 螺钉准确性。螺钉准确性指在术后腰椎CT上螺钉位置与椎弓根骨皮质之间的距离关系,具体评价方法为Gertzbein与Robbins分级[16]:A级,螺钉完全位于椎弓根内;B级,椎弓根皮质侵犯<2 mm;C级,椎弓根皮质侵犯≥2 mm且<4 mm;D级,椎弓根皮质侵犯≥4 mm且<6 mm;E级,椎弓根皮质侵犯≥6 mm。A级为螺钉位置优秀,B级为螺钉位置良好。由对本研究不知情的一名脊柱外科医生和一名放射科医生在医院影像系统上,通过腰椎CT多平面重建影像(窗位800,窗宽2000)独立评估椎弓根螺钉的准确性。
(3) 围手术期情况。其包括手术时间、术中出血量、并发症发生情况、术后平均住院时间。
1.4 统计学方法
使用SPSS 26.0软件进行统计学分析,使用Shapiro-Wilk检验进行计量资料的正态性检验,符合正态分布的计量数据以均数±标准差表示,不符合正态分布的计量数据以M(Q1,Q3)表示。
2 结果
本研究共完成了20例天玑Ⅱ机器人辅助胸腰椎椎弓根螺钉内固定术,置入了92枚椎弓根螺钉。置钉节段为4枚T12,4枚L1,4枚L2,4枚L3,28枚L4,36枚L5,9枚S1,3枚S2。
2.1 导针偏差
导针的入点偏差为1.44(0.93,1.93) mm,止点偏差为1.47(1.02,2.22) mm,综合偏差为1.55(0.96,1.99) mm。轴位角度偏差为1.90°(1.40°,2.20°),矢状位角度偏差为1.00°(0.60°,1.20°)。
2.2 螺钉准确性
置入的92枚椎弓根螺钉中,83枚螺钉为A级,9枚螺钉为B级,无C级、D级或E级螺钉。螺钉位置优秀率为90.2%,螺钉位置优良率为100%。
2.3 围手术期情况
20例患者手术时间为(206±60) min,术中出血量为200(113,200) mL,术后住院时间为5 (4,6) d。没有手术在术中转换为徒手手术,术中没有出现机器人故障,围手术期未出现并发症。表1列出了天玑Ⅱ机器人与其他脊柱手术机器人的临床应用效果对比情况,结果显示天玑Ⅱ机器人的临床应用效果与其他机器人相当。
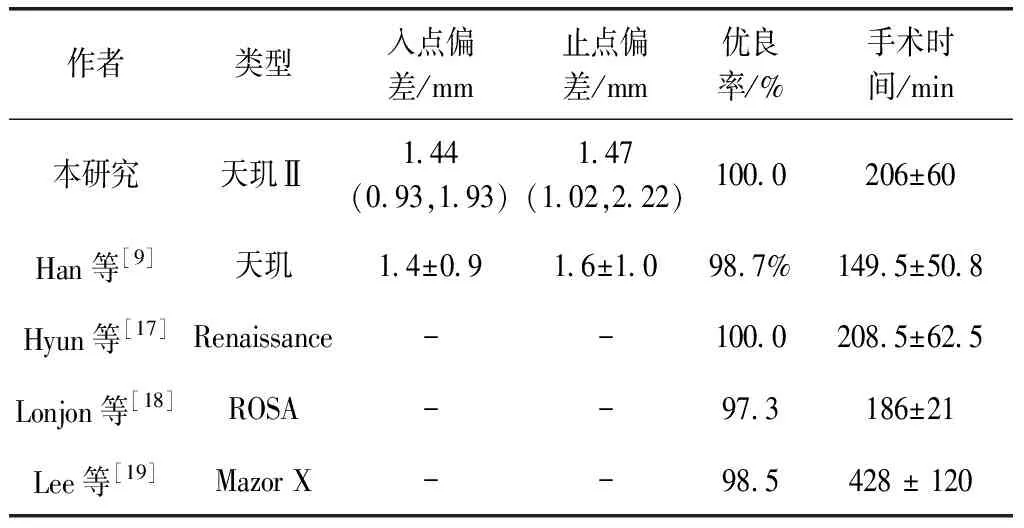
表1 天玑Ⅱ机器人与其他脊柱手术机器人的临床应用效果对比Table 1 Clinical comparisons of 2nd generation TiRobotand other spinal robots
3 讨论与结论
北京积水潭医院作为国内率先将机器人用于骨科手术的医院,已完成多项天玑机器人辅助脊柱手术的临床研究[9,12,20-22]。Han等[9]通过前瞻性随机对照研究对比了机器人辅助胸腰椎手术与徒手胸腰椎手术的安全性和有效性,其中机器人组螺钉置入位置优良率为98.7%,高于徒手组的93.5%;在螺钉规划位置和实际位置的偏差方面,机器人组螺钉的平均偏差为(1.5±0.8) mm。Fan等[12]曾进行机器人辅助与徒手置入颈椎螺钉的随机对照研究,结果显示机器人组螺钉位置的优秀率和优良率均高于徒手组(分别为87.6% vs. 60.8%和98.9% vs. 91.2%);螺钉实际位置与规划位置的偏差为0.83 (0.44,1.29) mm,低于徒手组的偏差。此外,Le等[20]进行机器人辅助与徒手置入腰椎皮质骨螺钉的回顾性研究,结果显示机器人组螺钉位置的优秀率和优良率均高于徒手组(分别为87.2% vs. 66.9%和95.3% vs. 86.9%)。
但是,使用天玑手术机器人完成手术也存在一些不足:① C臂扫描图像之前需要安装专门的图像配准标定器,反复透视确认标定器上的标定点被正侧位图像同时捕获,才能进行下一步的图像扫描;② 在手术规划完成之后,需要手术台下工作人员进行操作以执行规划;③ 末端工具单平面示踪,可视角度受限,有时需要反复调整光学追踪系统位置和角度。通过医工结合、协同创新,开发出了天玑Ⅱ机器人系统。它主要的升级为:① 将图像配准标定器与C臂整合,降低了图像配准难度,减少手术环节,节省手术时间;② 术者可通过直接点击主控屏和机械臂末端控制器来全面掌控机器人,减少对手术台下工作人员的依赖;③ 机械臂360°全向示踪,更易被光学追踪系统识别,减少术中调整光学追踪系统位置和角度的次数。
本研究通过20例机器人辅助脊柱手术,发现天玑Ⅱ机器人系统辅助椎弓根螺钉内固定术可达100%的螺钉位置优良率,略高于既往天玑机器人的研究结果,手术时间、出血量和术后住院时间与既往研究相似。与国外SpineAssist[20]、ROSA[21]等脊柱手术机器人的螺钉位置优良率相比,天玑Ⅱ机器人的准确性更高。此外,与第一代天玑机器人相比,使用天玑Ⅱ机器人可节约手术室的人力资源,无需台下临床工程师的协助操作。
由于天玑Ⅱ骨科手术机器人是一个全新的系统,其临床应用结果的研究未见报道,且本文中报道的样本数量相对较少,未与徒手手术进行对比,因此本文会存在一些局限性。未来需要进行大样本的多中心前瞻性研究,来验证及更新此项研究结果。
综上,天玑Ⅱ机器人系统较前一代手术机器人进行了多项升级,有助于更加准确、高效地完成胸腰椎椎弓根螺钉内固定术,节约了机器人辅助手术的人力成本,以后有望逐步在骨科临床手术中广泛应用。