基于机载多光谱的冬小麦返青期土壤墒情反演
2022-06-29徐飞飞
王 钧,陆 洲,罗 明,徐飞飞,张 序
(1.苏州科技大学 环境科学与工程学院,江苏 苏州 215009; 2.中国科学院 地理科学与资源研究所,北京 100101)
在我国,农田用水约占全社会总用水量的60%,但其中仅约40%得到了有效利用,大田漫灌的灌溉方式造成了严重的水资源浪费。对农田土壤墒情进行实时准确监测,有利于精准灌溉技术的实施和水资源的高效利用。
传统的土壤墒情监测方法主要包括烘干称重法、电阻法、时间域反射仪法和中子水分仪法等,这些方法虽然精度高,但是工作量大、数据时效性差,难以满足大范围、实时快速监测土壤墒情的实际需求。随着卫星遥感技术的迅速发展,基于土壤的光谱反射特性对土壤墒情进行反演,可实现对大范围土壤墒情的动态、快速监测,能够弥补传统方法的不足;但是,该方法容易受到天气、重访周期,以及空间分辨率的影响,而且,在农田尺度上,卫星遥感反演的方法还存在着时效性较差、精度较低的问题。
低空无人机载多光谱仪具有灵活性高、操作简便的特点,可以实时获取高分辨率的遥感影像,能够弥补传统监测方法和卫星遥感方法的不足,为土壤墒情反演提供了新的技术支持。近年来,国内外学者利用无人机多光谱遥感技术进行土壤墒情监测已取得许多成果。张智韬等利用大疆经纬M600型多旋翼无人机搭载Micro-MCA型多光谱相机建立土壤波段反射率与含水率的回归模型,发现运用逐步回归法建立的模型预测精度最高,且随着土层深度增加,土壤含水率的反演精度下降;李鑫星等将Micasense Red Edged-M型多光谱相机搭载在大疆Phantom 3型无人机上,分别用BP(反向传播)神经网络、支持向量机和偏最小二乘法对表层土壤水分含量进行建模,结果发现,BP神经网络模型的预测效果较好;冯珊珊等采用大疆精灵4 pro无人机搭载Parrot Sequoia传感器飞行采集了6个时相的烟叶种植农田多光谱数据,利用垂直干旱指数构建农田土壤水分反演模型,整体反演精度较高,实现了对农田土壤水分的快速监测;Romero等利用大疆Phantom 3 Pro搭载Sequoia多光谱传感器,通过计算10种植被指数,输入人工神经网络模型来估算葡萄园的水势,最后得到的模型拟合度较高。
返青期是冬小麦生长发育的关键时期,此阶段要做好保墒工作,控制土壤水分,并结合苗情、墒情调节肥水管理,如果管理不当,将导致冬小麦分蘖出现问题。目前,关于自然状态下返青期冬小麦田的研究甚少,大多数只是通过花盆模拟试验或在其他作物种植地块进行研究。为此,本研究通过对返青期冬小麦田土壤的野外采样、多光谱采集、土壤含水率测定等一系列工作,建立波段反射率、植被指数与2个深度(10、20 cm)土壤墒情的多元回归模型,并对模型精度进行评价,探究快速准确监测冬小麦田块土壤墒情的最佳方法,以期为大田灌溉,以及冬小麦返青期的管理提供参考。
1 材料与方法
1.1 研究区域
研究区位于张家港市常阴沙现代农业示范园区(120°47′29″E,31°52′30″N),地处长江下游,属北亚热带南部湿润性气候,耕作方式为稻-麦连作,全年日平均气温15.2 ℃,年平均降水量1 037 mm,土壤以轻壤土和砂壤土为主,耕层土壤pH值为7.73,有机质含量20.72 g·kg。
1.2 数据采集
数据采集包括无人机多光谱影像的获取与采样点的土壤墒情测定。
采用大疆精灵4多光谱版(P4 Multispectral)获取无人机多光谱影像。P4 Multispectral搭载6个1/29英寸(1英寸≈2.54 cm)CMOS(互补金属氧化物半导体)影像传感器,其中,1个是用于可见光(RGB)成像的彩色传感器,另外5个是用于多光谱成像的单色传感器,分别对应于蓝(Blue)[(450±16) nm]、绿(Green)[(560±16)nm]、红(Red)[(650±16)nm]、红边(Rededge)[(730±16)nm]、近红外(near-infrared)[(840±26)nm],单个传感器的有效像素均为208万(总像素212万)。在冬小麦返青期,选择天气晴朗、风速较小的天气进行无人机影像采集。本研究的采集时间为2021年2月24日11:00—12:30,飞行高度为120 m,多光谱影像空间分辨率为0.051 m,航向重叠率为75%,旁向重叠率为60%,主航线角度为42°,拍照模式为航点悬停拍照,飞行速度为5 m·s。
法国乡村旅游产品形式多样,个性十足。如普罗旺斯的瓦朗索,除拥有普罗旺斯地区特色的薰衣草体验活动以外,还包括一系列体育活动,如徒步、骑行等陆地运动,游船、踏板船、独木舟、皮划艇、漂流等水上运动以及热气球、滑翔机、降落伞等高空娱乐项目⑦。当地的旅游产品充分利用自然环境资源,涉及海陆空三栖空间,满足不同旅客的游玩需求。
土壤墒情的测定采用取土烘干法。采样前对研究区进行不均匀少量喷水处理。根据渔网布点法在研究区布设50个采样点,现场实地采样时剔除非小麦种植区域后,共计39个实际采样点(图1)。在每个采样点分别采集10 cm和20 cm深土壤样本,同一点取土3次,混匀后作为一个土样。土样采集后送至实验室测定土壤含水率。

图1 研究区与地面调查样点分布
1.3 数据处理与分析
1.3.1 反射率提取与植被指数计算
将获取的736景无人机多光谱影像通过标准白板进行辐射校正,生成各波段准确的反射率信息后,利用DJI Terra软件完成影像拼接。将拼接得到的完整的试验区影像波段融合后,根据实际取样点坐标信息分别提取各个波段0.051 m×0.051 m范围内的像元反射率均值,然后使用ENVI 5.3软件分别计算归一化植被指数(NDVI)、增强型植被指数(EVI)和垂直干旱指数(PDI)。
1.3.2 建模集与检验集划分
将39个土壤采样点中的30个划分为建模集,用于回归建模,另外9个划分为检验集,用于检验模型精度。将各土壤深度的样本总体情况整理于表1。
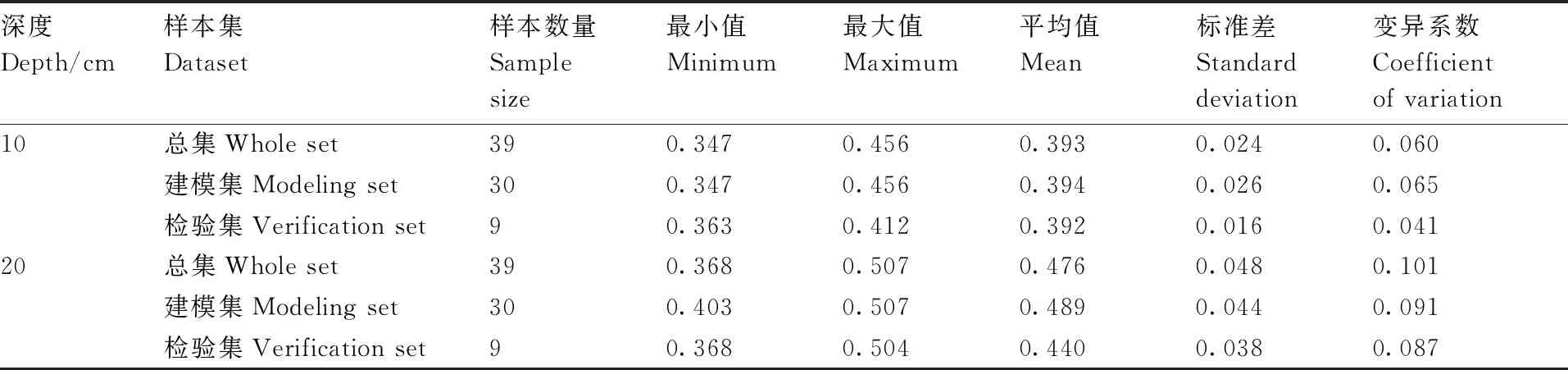
表1 研究区采样点土壤墒情特征统计
1.3.3 模型构建与应用
本研究利用机载多光谱数据建立快速监测冬小麦田块土壤墒情的模型,技术流程如图2所示。首先对获取的机载多光谱影像进行拼接、融合、校正等预处理,提取波段反射率,并计算植被指数;然后进行共线性诊断,根据土壤墒情实测值分别使用逐步回归法(stepwise regression)、岭回归法(ridge regression)和偏最小二乘法(partial least squares regression,PLSR)建立5个波段反射率(蓝、绿、红、红边、近红外)、3个植被指数(NDVI、EVI、PDI)与2个深度(10、20 cm)的土壤墒情反演模型;最后根据验证区域的实测数据检验模型精度并进行应用。

UAV, Unmanned aerial vehicle; PLSR, Partial least squares regression. The same as below.
1.3.4 模型检验
利用模型的决定系数()、均方根误差(RMSE)和相对分析误差(RPD)评价建模精度和检验精度。其中,可以度量2个变量间的回归拟合效果,其值处于0、1之间,值越大、越接近1,表明回归方程对样本数据点的拟合优度越高,值越接近0,说明拟合优度越低。当RPD值小于1.0时,模型不具备预测能力;当RPD值为1.0~<1.4时,模型仅具有区别高值和低值的能力;当RPD值为1.4~<1.8时,模型具有定量预测能力;当RPD值为1.8~<2.0时,模型具有较好的定量预测能力;当RPD值为2.0~<2.5时,模型具有很好的定量预测能力;当RPD值等于或大于2.5时,模型具有极好的预测能力。总的来说,值越大、RMSE值越小、RPD值越大,模型的反演效果越好。
2 结果与分析
2.1 多重共线性分析
在多元线性回归中,若某些自变量之间的相关程度较高,则会使各回归系数估计的方差很大,导致估计性质不稳定,模型与实际相差很远。为此,本研究首先利用SPSS 26.0软件对采集到的5个波段反射率、3个植被指数进行共线性诊断。采用方差膨胀因子(VIF)来表征其共线性的严重性:某个变量的VIF值越大,说明其与其他变量间的共线性越强,当VIF大于10时,说明变量之间存在很强的共线性问题。结果显示:5个波段反射率、3个植被指数的VIF值都远大于10(表2),说明存在严重的多重共线性问题,若不进行妥善处理,会使得模型的稳定性变差、预测精度降低。
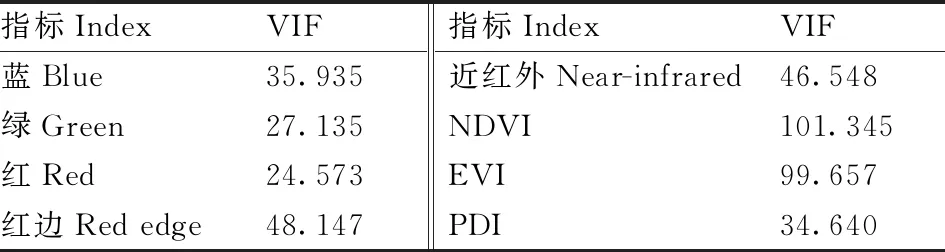
表2 方差膨胀因子(VIF)统计
2.2 土壤墒情的反演模型
为了消除多重共线性对模型的影响,特采用逐步回归、岭回归和偏最小二乘模型进行多元回归分析。将5个波段反射率、3个植被指数作为自变量,分别以10 cm和20 cm深度的土壤墒情作为因变量,建立模型。
逐步回归法是回归分析中一种筛选变量的过程,其基本思想是剔除变量中不太重要,且与其他变量高度相关的变量,以降低多重共线性的程度。本研究采用逐步回归法对8个自变量进行筛选,变量入选和剔除的显著性水平分别设定为0.05和0.10。
岭回归法是一种改良的最小二乘法。当自变量之间存在较强的多重共线性时,求得的多重线性回归模型很不稳定,岭回归分析可以很好地解决这一问题。在对10 cm深度的土壤墒情进行建模的过程中,当岭回归系数=0.020时,标准化回归系数趋于稳定;在对20 cm深度的土壤墒情进行建模的过程中,当岭回归系数=0.019时,标准化回归系数趋于稳定。因此,建模时将这2个土壤深度的岭回归系数分别设置为0.020和0.019。
偏最小二乘法综合了多元回归分析、典型相关分析和主成分分析的思想,能够在自变量存在严重多重相关性的条件下进行回归建模。偏最小二乘回归在SPSS 26.0软件中通过PLS扩展模块来实现。在建模时发现,不管是10 cm还是20 cm深度,前5个潜在因子累计均可以达到很好的信息提取效果,所以将潜在因子最大数目设置为5。
将上述3种方法的建模结果整理于表3。可以看出,利用逐步回归法构建的模型均表现最优,值最高,且RMSE值最低,而岭回归法的建模效果相对最差。对比2个土壤深度的建模结果,无论采用哪种方法,对10 cm深度土壤墒情的建模效果均更优,逐步回归法、岭回归法、偏最小二乘法的值分别达到了0.885、0.762和0.838。针对20 cm深度土壤墒情建立的3个模型,其值仍达到较强相关性,说明利用无人机多光谱技术对20 cm深度的土壤墒情进行监测仍然具有一定的可行性。
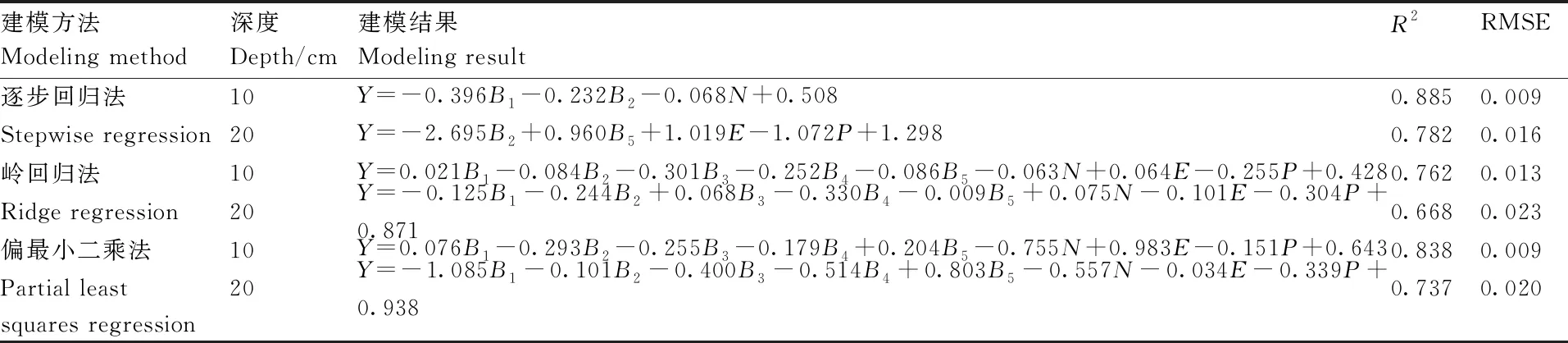
表3 基于不同波段反射率的土壤墒情多元回归模型
2.3 模型验证
为了检验对2个深度土壤墒情反演的预测效果,将模型预测值与实测值进行拟合,分别计算预测值与实测值之间的、RMSE和RPD(表4、图3)。针对10 cm和20 cm深度土壤墒情,用逐步回归法构建的模型的预测值与实测值之间的分别达到了0.899、0.865,系3种方法中最高的。针对10 cm深度土壤墒情,用逐步回归法构建的模型的预测值与真实值之间的RPD值为3.091,说明其具有极好的预测能力;针对20 cm深度土壤墒情,用逐步回归法构建的模型的预测值与真实值之间的RPD值为2.220,说明其具有很好的预测能力。总体来看,3种方法中,岭回归法构建的模型的反演精度最低,但其RMSE值亦在允许范围内(0.1以下),用逐步回归法构建的模型预测精度最高。
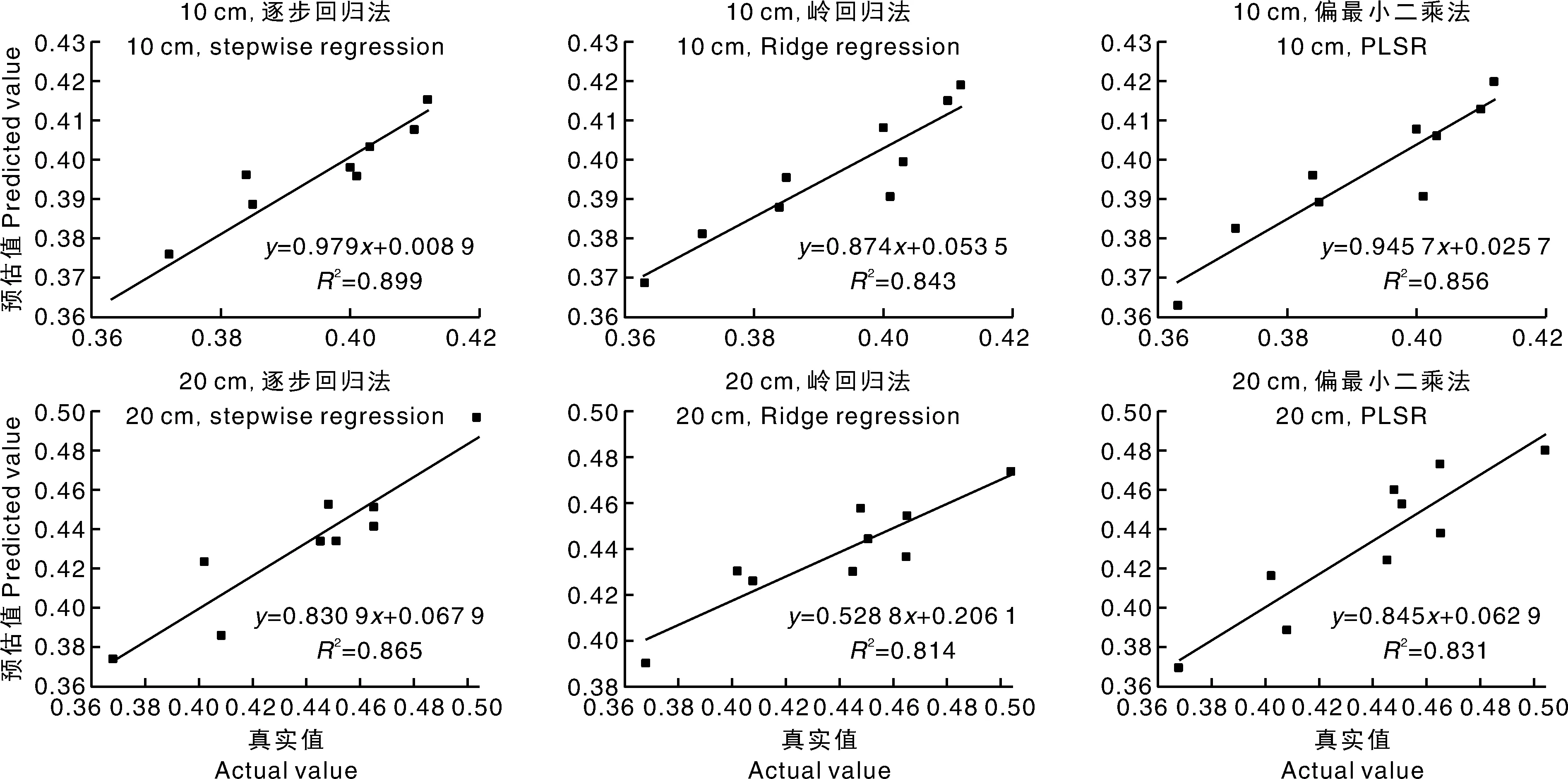
图3 预估值与对应实测值的关系

表4 土壤墒情反演结果的精度
2.4 模型应用
基于上述研究,运用逐步回归法构建的模型,估算研究区2个深度的冬小麦田块土壤墒情(图4)。研究区道路以西区域10 cm深度的土壤墒情大部分处于0.25~0.35,道路以东区域10 cm深度的土壤墒情稍高,大部分处于0.30~0.45;研究区内20 cm深度的土壤墒情分布比较均匀,基本处于0.35~0.45。通过反演制图可以直观地反映整个种植区域的土壤墒情,可为有针对性地对整个区域的冬小麦进行肥水管理和精准作业提供参考。

图4 试验区域土壤墒情反演结果
3 讨论
当前,应用于土壤墒情监测的遥感影像主要有Landsat、Sentinel和高分一号等,但这些影像的空间分辨率偏低,同时受到重访周期和天气等因素的影响,难以对小区域范围进行实时高精度的土壤墒情监测。本研究利用低空无人机多光谱影像进行反演,可以满足农田尺度的高时空分辨率要求,在监测土壤墒情时机动灵活、时效性高。
针对冬小麦返青期,本研究设置了2个试验深度,随着土壤深度的增加,反演精度降低,这与以往研究的结果一致。受冻害影响,试验时研究区的苗情较差,植被覆盖度较低,只有紧靠硬化路以西区域有一块苗情较好、覆盖度较高的地块。反演结果发现,此处土壤墒情在10、20 cm深度表现出了与其他地块不同的趋势。这一结果提示我们,对于冬小麦起身期、拔节期等覆盖度高的生长阶段,本研究所建立的模型是否适用,还需要进一步研究验证。植被生育期不同,生长量有所差异,植被叶片反射率亦不同。在可见光波段,植被光谱特征主要受植被叶绿素的影响;而在近红外波段,植被光谱特征主要受植被叶片内部细胞结构的影响。随着冬小麦生育期变化,植被的叶绿素含量和叶片内部细胞壁、细胞间隙都会发生变化,因而不同时期的波段反射率和植被指数并不完全相同。今后,可针对其他生长阶段,综合小麦的形态和生理变化等来进一步分析、建立适合小麦各生育期的土壤墒情监测模型。
土壤光谱反射率不仅受含水率影响,还与土壤的矿物成分、组成、结构和腐殖质等有密切的关系。据此,我们认为,本研究所建立的模型适宜苏州地区粉砂质黏壤、颗粒细小、孔隙度高的水稻土。对于其他区域不同类型的土壤,如有机质含量少、黏粒含量高、质地黏重的红壤,以及有机质含量高,具有强烈胀缩和扰动特性的黏质黑土等,其土壤墒情最优反演模型有待进一步研究。
卫星遥感可以实现对较大地区的土壤墒情监测,但是分辨率较低,且易受天气和重访周期等因素的制约。低空无人机遥感虽然具有较高的分辨率,且机动灵活,但是监测区域有限。如何将二者有效结合起来,实现大区域、高精度的土壤墒情监测是今后重要的探索方向。