基于PLC与改进BP的矿用电机轴承故障诊断
2022-06-28张为远
张为远,杨 博
(1.山西三元福达煤业有限公司,山西 长治 046300;2.太原科技大学 机械工程学院,山西 太原 030024)
电机作为煤炭生产运输设备的关键部件,一旦损坏,将会对生产造成严重影响,电机损坏多为轴承故障。冯江华[1]为获得轴承早期微弱故障信号,提出磁链峰值能量法,通过实验提取峰值能量法中的故障特征分量来判断轴承是否失效。姜磊等[2]由于振动信号易被淹没采用小波阈值对信号去噪并结合解析模态分解来提取故障信号。乔社娟等[3]采用传感器获取电机工作时的电流、电压和温度信号传给PLC通过程序判断故障实施停机、断电对电机进行保护。魏立明等[4]提出利用BP神经网络算法来控制PLC方法,并将其应用到电气火灾预警系统中。在以上研究基础上,本文提出一种基于200smartPLC与改进BP的矿用电机故障诊断方法。
1 硬件设备和硬件组态
1.1 硬件设备
状态监测由传感器完成,传感器采用苏州捷杰传感器技术有限公司生产的型号为VB21的无线振动传感器共4个,由于其采用无线数据传输,因此可针对不同的检测节点,可移动性强,可进行3轴振动采集。其中,3轴加速度峰值量程0.01~156.80 m/s2(±16 g),3轴速度有效值0.01~199.99 m/s,振动特性的分辨率0.01 m/s2,在速度、加速度方面的精度是±5%,内部自带快速傅里叶变换分析算法,既能采集设备原始信号的速度、加速度、位移等,又能计算出频率等频域参数,同时对测量信号进行模数转化,测量的信号直接输出为数字量;电机采用三相异步电机;测试轴承包含正常轴承和故障轴承,轴承故障包括外圈、滚子和内圈故障。传感器与PLC之间的数据采用网关完成,网关采用自组网ZigBee、LoRa无线通讯协议,当无线传感器处于无线网关信号覆盖范围内时,无线传感器会自动接入当前最近的网关。
1.2 硬件组态
对电机需要监测点数进行统计,由于监测点数较少,采用高性价比的西门子S7-200系列PLC接收传感器的数据并发送数据至触摸屏。设计方案分为两部分:PLC设计程序的编写软件采用step7软件,按模块化思想进行编写,主要由输入输出转换、自动控制、报警及通讯数据转换模块组成;触摸屏采用步科触摸屏用来对PLC的数据实时监测同时显示电机主要部位振动、温度值及电流值。其中报警故障类型信息、轴承故障程度、报警定位、报警时间等可以显示在上位机的报警窗口,并可通过选配语音组件实现声光及语音报警。还可通过互联网实现手机APP远程监控;PLC与触摸屏之间的信号传输通过NGWZ-01来完成,NGWZ-01利用公用无线网络为控制室提供与传感器之间的无线长距离数据传输功能,同时具有ZigBee数据通信功能,方便采集现场数据,减少布线。
1.3 数据传输
数据传输部分可分为两部分:1)无线信号传输部分。无线振动传感器与矿用电机及网关之间采用无线通讯方式,有利于井下复杂的作业环境。2)有线部分。在网关模块、PLC、上位机之间采用RS485通讯方式,RS485通讯稳定可靠,防止数据丢失。
2 BP神经网络
2.1 BP神经网络原理
BP神经网络是按误差逆向传播的多层前馈神经网络,对于多数系统而言3层的网络结构都能满足其要求。按具体构造分为输入层、隐含层和输出层。BP神经网络是一种按误差逆向传播不断循环训练的多层前馈网络系统。BP算法属于∂算法,其核心思想为:当输入的学习样本为t:x1,x2,…,xt,则其相应的输出样本为:y1,y2,…,yt.算法是将网络推算出的实际的输出z1,z2,…,zt与对应的目标矢量y1,y2,…,yt之间的误差大小修改其权值,使zi(i=1,2,…,t)与目标值yi间存在极小的误差。在训练过程中整理后的输入数据通过输入层和隐含层逐层运算后传向输出层,在训练过程中当前层的神经元状态都只影响下层神经元的状态[5].若输出层得到的实际输出值与期望值误差较大,则通过对比计算输出层的误差值的大小变化,最后再通过反向传播进行循环,误差信号由网络沿原来的连接通道反向传输并修改各层神经元权值直至达到期望的目标值。传统结构见图1.
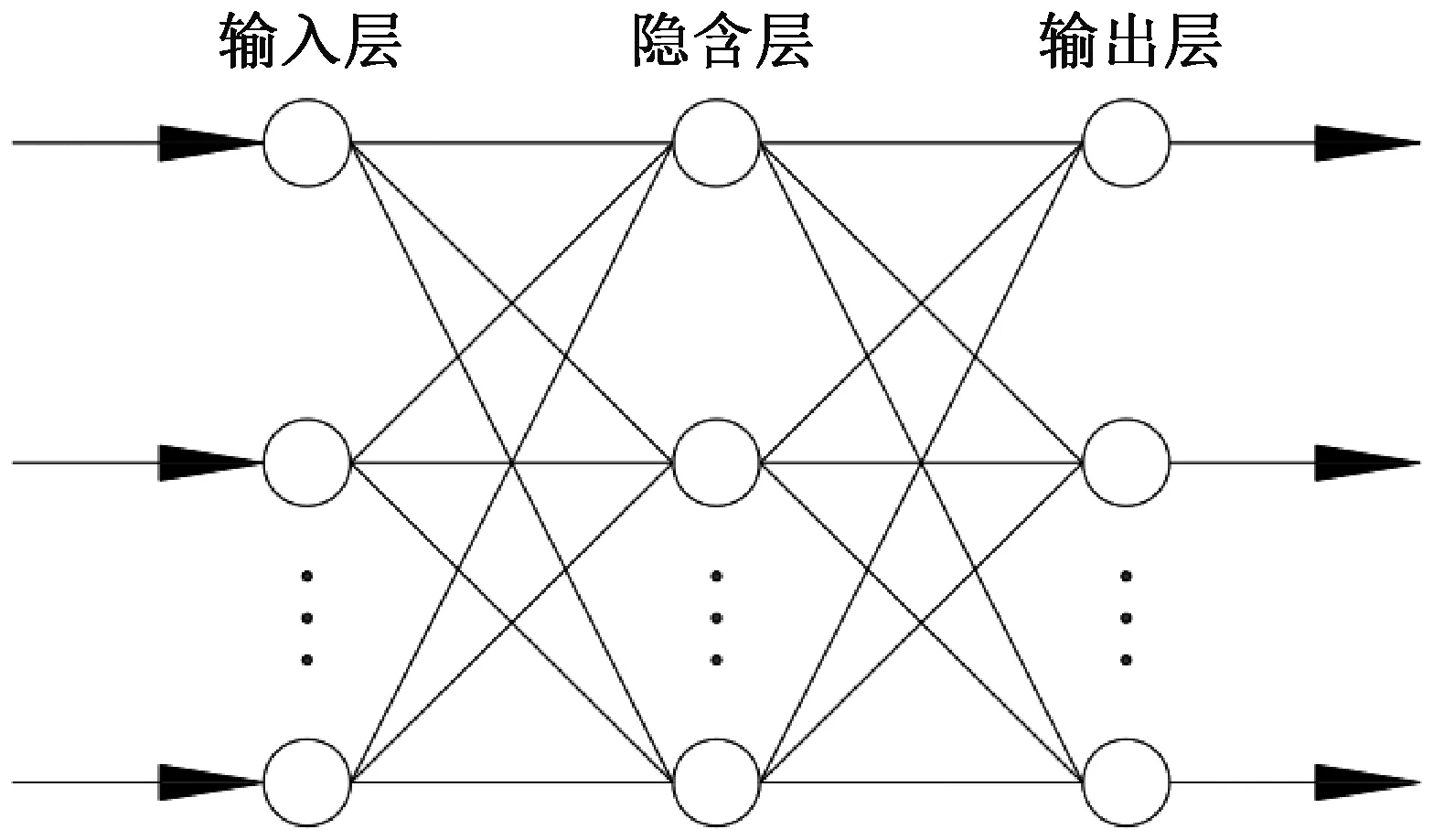
图1 神经网络结构图
2.2 故障参数处理
在工作过程中轴承的振幅越大,故障程度越明显。在利用基于PLC及无线传感器获得原始振动数据后,由于信号中包含其他的噪声信号,需要对信号进行分析处理才能作为训练数据集作为BP神经网络的输入。由程秀芳等[6]的研究表明,振动信号的时域分析方法主要分为时域波形分析和时域指标两方面,波形分析主要针对专业人员,可从波形中直接看出周期、谐波、脉冲,但波形分析主要针对明显信号及常规的信号以及有丰富经验的人员才比较适用。因此选择进行时域指标分析,以此确定BP神经网络的输入层神经元输入节点个数。根据BP神经网络的结构及原理,建立训练网络模型。为了减小时域处理后的数据大小不同而造成的神经网络输出样本曲线拟合性问题,从而利用归一化公式,对数据进行初始化处理使其限定在规定的范围内。其具体处理过程为:假设所选择的故障样本中的任意输入参数xk的允许最大值和最小值分别为xmax和xmin,对输入参数进行归一化处理的函数表达如下[7]:
(1)
3 仿 真
3.1 BP神经网络训练
将PLC程序提取的数据经时域分析处理完成的峰值、均方值、裕度指标及波形系数作为输入数据进行BP神经网络的训练,神经网络的输出形式按照轴承故障类型的不同分别表示为:(0,0,0)正常;(0,0,1)滚子故障;(0,1,0)内圈故障;(1,0,0)外圈故障。
在Matlab软件中其前馈网络选择feedforwardnet函数。该函数中网络结构的输入层和输出层的维数是由具体的训练函数来确定的。因此选择trainbfg训练函数实现BP网络的学习。该函数不仅能用于训练BP神经网络,而且对于其他任何形式的神经网络,也可训练,只要满足传递函数对权值和输入的函数可导即可。传统BP网络训练结果见图2,从图2得出在迭代到204步时迭代终止达到要求。
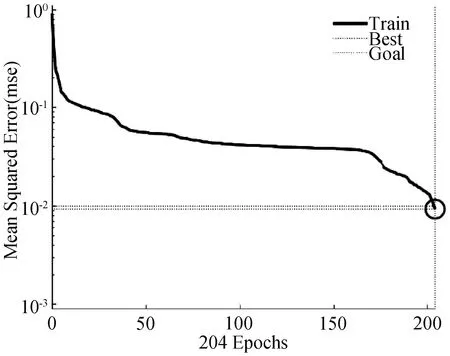
图2 传统BP网络的训练结果图
3.2 改进BP神经网络
从上述可以看出BP神经网络自身的不足,为了加快收敛速度,缩短训练时间,对BP算法进行改进。其中改进算法有:自适应步长、增加动量项等。BP算法核心是采用最速下降规则来搜寻最优的解,最速下降规则沿着梯度的相反方向对权值进行修正,由于未考虑前一阶段修正的结果,因此会在训练过程中存在震荡现象,从而降低收敛速度。但是将动量项加入BP神经网络后,其搜索过程按照梯度下降方向进行,如果所在梯度下降与前一个梯度下降的方向一致,则搜索过程加速,否则降速。而在附加动量法中选取率的选择存在困难,其选择结果影响整体收敛性和收敛速度。因此考虑同时引入自适应步长,自适应步长与增加动量项相结合,形成动态自适应学习率的BP改进算法。采用动量自适应调整步长法改进BP神经网络,同时将增加动量项与自适应步长结合将traingdx作为训练函数,学习率设置为0.04,训练目标设置为0.01.
定义误差函数公式为[8]:
(2)
式中,m为总的样本数;n为输出层中神经元个数;Tmi为期望的输出值;Xmi为神经网络的实际输出。
对上式添加动量项,即[8]
(3)
当η(0)取1,则学习率的计算可按下式计算[8]:
(4)
由式(4)得出,采用增加步长及自适应动态补偿对BP进行改进后,当E(n)
训练结果见图3.
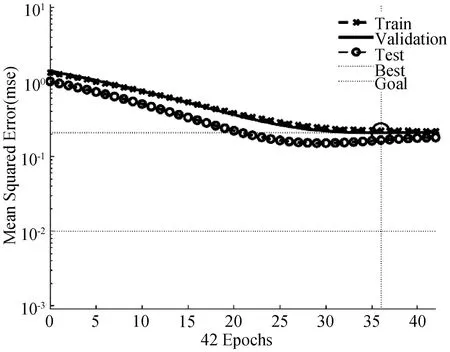
图3 改进BP网络的训练结构图
从图3中可以看出,将自适应步长及增加动量项引入后,震荡现象得到有效抑制,误差变化曲线更为平滑,神经网络收敛速度进一步加快,在训练到第36步时,训练效果达到目标设定。
通过以上分析,采用自适应及增加动量的方法改进BP神经网络的方法有明显的优势,同时收敛速度更快。
4 结 语
本文在故障特征提取过程中采用基于无线传感器及PLC的系统能够实时准确地提取故障特征,该过程确保数据不失真。在改进的BP神经网络中将提取的故障特征数据作为输入在设置好的网络模型中进行训练,结果显示,该算法稳定性良好,震荡小,故障监测精度高。结果表明,PLC与改进BP相结合的方法易于操作,故障定位准确,推广性强。
