真空低温太阳辐照环境下的天线热变形测量技术
2022-06-28蒋山平张鹏嵩李竑松陶东兴杨林华徐焱林
蒋山平,黄 海,张鹏嵩,李竑松,陶东兴,杨林华,徐焱林
(1.北京航空航天大学宇航学院,北京100191;2.北京卫星环境工程研究所,北京 100094)
0 引言
航天器结构,如大型网状天线、光学结构、支撑臂、桁架等复杂结构必须保持在轨高稳定性。然而,在太阳准直热流辐射、冷黑背景、地球红外辐射及地球反照等外热流的作用下,由于进出地影造成的热流变化,结构自身的遮挡、受照面角度不同引起的热流差异以及结构自身物性不均匀等多种原因,将导致结构本身产生温度梯度,进而影响航天器性能指标的实现。为了对航天器结构在轨热稳定性进行考核验证,必须在地面对在轨外热流进行模拟,真实再现结构的在轨温度分布状态,同时结合高精度的热变形测量手段获取模拟真实在轨热环境下的结构变形数据。
国际上利用太阳模拟的方式以及基于光学非接触精度测量来开展航天器大型结构的精度验证技术已经较为成熟。2009 年,美国喷气推进实验室对地球科学卫星展开式网状反射天线进行太阳模拟热真空试验,利用非接触摄影测量系统监测了天线结构的温度和变形。2006 年—2010 年,美欧相继开展了“普朗克”空间望远镜、“赫歇尔”望远镜、“詹姆斯·韦伯”太空望远镜承力结构常压以及真空低温环境下的热变形测量。国内以北京卫星环境工程研究所为代表,在太阳模拟器热试验和非接触热变形测量方面均进行了相应的试验应用:2016 年—2019 年,在KM7 空间环境模拟器内利用红外笼模拟外热流结合摄影测量的方式,进行了多次卫星网状天线真空低温热变形测试;2019 年,利用KM6 及其大型太阳模拟器进行了某空间相机的热平衡试验。采用太阳模拟器进行空间外热流模拟和非接触摄影测量技术在国内都属于初步应用阶段,此前还没有将两者结合应用的工程经验。
本文介绍了国内首次采用太阳模拟器结合非接触摄影测量进行的某天线太阳辐照热变形测量试验,属于航天试验领域2 种新技术结合应用的新型地面试验。通过模拟太阳准直辐射外热流,真实再现天线在轨温度梯度变化,结合高精度变形测量方法测量地面模拟的天线在轨热变形,为考核航天器热设计和后续结构优化提供更加准确的试验数据,亦为航天器地面环境试验提供新的更高效可靠的试验手段。
1 方法原理
1.1 太阳辐照模拟技术
空间外热流模拟方法按照模拟热流的特点可以分为2 类:一类是模拟空间外热流的辐照强度、方向及其光谱特性,称为入射热流模拟法;另一类是使用某种加热装置,例如红外加热笼、红外灯阵或辐射加热板等对航天器加热,使航天器表面吸收的热量等于该表面在轨吸收的空间外热流,以获得相同的热效应,而不考虑实际的空间外热流特性,称为吸收热流模拟法。太阳模拟器属于入射热流模拟法,其采用多套大功率短弧氙灯作为光源阵列,光源阵列发出的光线通过太阳模拟器光学系统进行汇聚、分割匀光,然后准直反射到试验空间内。目前太阳模拟器主要采用的是离轴准直式光学系统,如图1 所示。

图1 离轴准直式太阳模拟器结构示意Fig.1 Structural diagram of the off-axis collimated solar simulator
相较于红外加热笼、红外灯阵等传统外热流模拟设备,太阳模拟器可逼真模拟空间太阳光的准直性,特别适合复杂表面结构航天器、光学望远镜等载荷的地面模拟热试验;另外,太阳模拟器采用大功率短弧氙灯作为太阳模拟光源,其光谱分布与太阳AM0 光谱分布非常接近(如图2 所示),在带涂层航天器热试验中与传统热模拟方法获得的航天器温度场区别较大,更接近在轨真实情况。
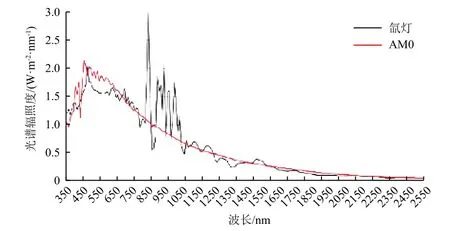
图2 太阳模拟器光谱和太阳AM0 光谱比较Fig.2 Comparison between spectrum of solar simulator and of solar AM0
1.2 热变形测量基本原理
航天器热变形测量方法包括数字近景摄影测量法、干涉测量法、经纬仪交会测量法和激光雷达测量法等。数字近景摄影测量法因具有非接触、大面积、快速、高精度的优点,通常作为真空低温环境下热变形测量的首选方法。摄影测量法通过从不同的位置和方向获取同一物体的2 幅以上的数字图像,经计算机图像匹配等处理及相关数学计算后得到待测点精确的三维坐标,主要依靠对被测物上非连续的目标点测量来获取被测面形数据。因此,进行结构变形测量时首先要在被测物上布置测点,通常采用定向回光反射标志点,然后用1 台或多台相机从不同角度对物体拍照。如图3 所示,在拍摄过程中,物点经过相机镜头摄影后成像在像平面上,镜头的投影中心为,物点经过投影到像平面上的像点为,则投影中心、物点和像点三点共线。

图3 摄影测量成像示意Fig.3 Principle of photogrammetric imaging
由此获得摄影测量最重要的解析关系式——共线条件方程式

式中:、为像点坐标;为光学系统主距;、、、、、、、、为组成旋转变换矩阵的9 个参数,是表征构像光线空间方位的3 个独立转角的函数;、、是物点在物方空间坐标系下的坐标;X、Y、Z是投影中心在物方空间坐标系下的坐标。
光线束平差解法是将标志点的像面坐标、空间三维坐标和相机的内方位元素、外方位元素均作为观测值,整体求解它们的最优化值的一种解算方法。基于相机在空间不同测站下对同一物点的成像光束在空间必相交于该点,能够将同一物点在不同测站中的共线条件方程联系起来;联立所有标志点在所有测站中的共线条件方程式组成方程组,最后应用光线束平差解法便可求解所有标志点的精确三维坐标。
2 太阳辐照热变形测量试验特点
本次太阳辐照热变形测量试验具有如下技术特点:
1)试验的被测天线网面为网状蜂窝结构,试验期间需要模拟太阳从侧边照射到天线的典型工况。实际在轨时天线网面在太阳平行光照射下会有部分透光和部分遮挡,使网面不同部位接收的外热流有较大区别,因此采用常规的外热流模拟方法很难精确再现在轨天线的实际温度分布,导致热致变形的地面模拟与实际在轨情况间存在较大偏差。而太阳模拟器具有平行光模拟的突出特点,对此类试件的热试验具有不可替代的优势。
2)为了精确分析天线热变形情况,需要获取天线网面上大量的测点变形数据,同时对测量精度要求高——变形测量精度要求优于0.05mm。针对真空低温环境下的变形测量,常规的测量方法在测量效率、测量精度和测量环境适用性上不能满足特殊环境下的测试需求,而对测量设备进行环境适应性改造后的摄影测量方法是真空低温环境下的首选方法。另外,太阳强光辐照环境对传统测量手段的影响非常大,而摄影测量法采用具有强烈回光反射特性的测量靶标,能够克服这一影响,并满足测量精度要求。
3)真空热变形测量试验需要结合环境热流模拟和变形测量2 种技术。其中,在进行摄影测量时,要求被测点四周不能有遮挡,而常规的红外笼外热流模拟方法会产生遮挡,太阳模拟器则没有此类问题。针对太阳模拟器和摄影测量的首次联合应用,本次太阳辐照热变形测量试验采用了太阳模拟器侧边水平入射,摄影测量设备放置在天线顶部的试验布局方式。
3 试验设备和布局
太阳辐照热变形测量试验在KM3E 真空环境模拟设备内进行,设备有效空间为3.6m×10m,能够模拟空间冷黑环境;太阳模拟器采用7 只10kW短弧氙灯水平点燃的离轴准直光学系统,有效辐照体积为2m×2m,辐照度0.05SC~1.5SC 连续可调(SC 为太阳常数),辐照不均匀度优于±5%,准直角±1.6°,如图4 所示。

图4 KM3E 真空环境模拟设备及中型太阳模拟器Fig.4 KM3E vacuum simulation facility and the medium solar simulator
变形测量系统由摄影测量系统、低温悬臂机构和低温标尺等组成,如图5 所示。被测天线通过KM3E 容器内的支撑机构固定。摄影测量系统包含2 台(1 台备用)专业量测相机,安装在相机保护舱内,并倾斜固定在低温悬臂机构的两端。低温悬臂机构通过螺接固定在容器底部导轨上,距天线上方约500mm,通过它的旋转可以带动摄影测量系统对天线进行环周拍摄测量。天线周边布设有3 根低温标尺,固定在支撑机构上。相机数据线缆通过真空穿墙插座与容器外的控制系统连接,实现相机数据传输及远程拍摄控制。

图5 变形测量系统布局Fig.5 Layout of the deformation measurement system
摄影测量相机像素为4096×3072,像元尺寸为6μm×6μm,镜头焦距为18mm,视场角72°×58°。相机保护舱上安装有高透过率、无畸变的光学石英窗口,舱内为常温常压环境,可确保相机在外部真空低温环境下仍能正常稳定工作,如图6 所示。

图6 专业量测相机和相机保护舱Fig.6The professional surveying camera and its protection box
为减少保护舱光学石英窗口对摄影测量的影响,试验前对量测相机和保护舱整体进行参数标定,并基于标定结果对量测相机参数进行整体修正。
高精度摄影测量需要有高度稳定的基准长度,试验采用3 根长度分别为1.5m、1.5m 和1m 的微晶玻璃标尺,其在[0℃,20℃]内的线膨胀系数<1×10/℃。试验中对标尺进行温控后,其基准长度变化不大于1μm,对测量精度的影响可以忽略。试验中,2 根低温标尺作为长度标准参与测量解算,另有1 根低温标尺作为冗余相对控制对变形测量精度进行在线检查。
被测天线为碳纤维材料的抛物面网状天线,口径1.5m。天线表面从径向主筋开始由圆心等角度划分出24 条直径,每条直径上间隔约100mm 粘贴1 个标志点,天线网面上共粘贴300 多个标志点。标志点具有定向回光反射特性,其反射亮度比普通漫反射白色标志高出数百甚至上千倍,有助于在相机闪光灯照射下轻松得到标志点的清晰图像。
4 试验过程和结果
被测天线在轨受太阳辐照产生剧烈温度梯度变化,选取2 种典型太阳辐照工况进行外热流模拟,分别模拟不同器‒日距离下,天线+方向(天线反射面向上时天线主轴向上方向)与太阳夹角为90°、太阳侧照天线时的外热流状态。外热流模拟工况如表1 所示,其中,工况A1 关闭太阳模拟器,天线不受照,模拟天线近地最低温工作;工况A2 和工况A3 开启太阳模拟器,调节不同辐照度输出,模拟不同器‒日距离下的太阳辐照度。

表1 外热流模拟工况设置Table1 Test conditions for external thermal simulation
在被测天线网面不同位置粘贴多个测温热电偶,监测试验期间测点温度的变化,如图7 所示。由测温曲线可见,采用太阳模拟器进行在轨入射外热流模拟,能够较为真实地再现天线不同位置处的瞬态温度剧烈变化情况,为地面模拟天线在轨剧烈形变效应提供了环境模拟支撑。

图7 被测天线表面测点温度曲线Fig.7 Temperature curve of measurement points on the surface of the antenna
试验过程中,每次变形测量时低温悬臂机构需旋转360°,量测相机每间隔2.5°拍摄1 次,共144 个摄站,耗时约6min。期间量测相机沿相机光轴在0°~100°区间内持续均速往返转动。摄站布局如图8 所示。
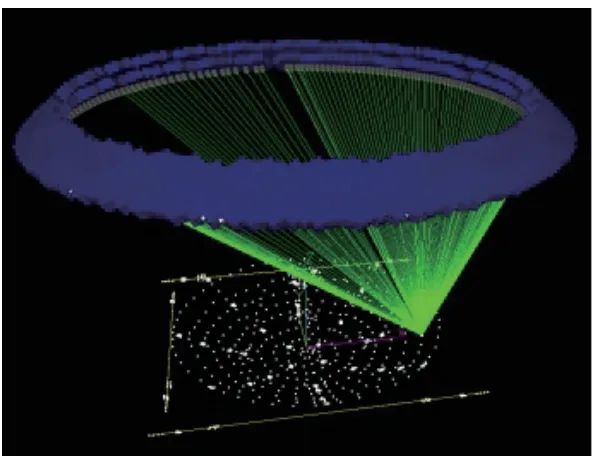
图8 测量摄站布局示意Fig.8 Layout of camera stations
采用专业测量软件对拍摄的大量数字图像进行数据处理,将解算得到的测点坐标转换至天线设计坐标系下,得到典型工况下的天线形面测量结果(见图9),并与天线形面变形仿真分析数据进行比较,如表2 所示。其中,天线形面变形仿真采用ANSYS 软件进行计算,天线材料属性、天线结构以及环境温度参数设置须与天线在轨典型工况的数据一致。天线变形实测结果与仿真数据的对比结果表明,两者基本相符,仿真模型较试验状态略为保守,能够验证热效应模拟和测量结果与仿真数据的一致性。

图9 天线不同工况下相对于基准工况的实测变形云图Fig.9 Measured deformation diagram of antenna under different test conditions
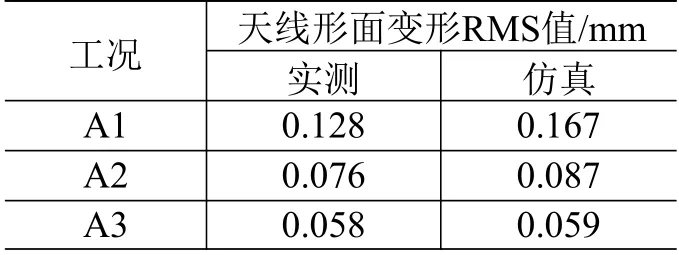
表2 天线形面测量结果与仿真分析数据比较Table2 Comparison between test results and simulation analysis data
通过对摄影测量系统在试验前的重复性精度标校和试验过程中的在线精度标校得到:试验前进行的5 次重复性测量中,天线上所有测点的单点重复性偏差RMS 为0.0035mm;试验过程中对低温标尺长度的测量中,相对于标定长度的点位测量偏差RMS 为0.014mm。依据误差合成的方和根法,系统总测量精度为重复性偏差和点位测量偏差的方和根值,即本次试验热变形测量精度为0.015mm(=2),满足试验总体技术要求提出的优于0.05mm的测量精度要求。
5 结束语
本文针对天线在轨受太阳辐照射环境下产生剧烈温度交变导致结构变形的情况,提出采用太阳模拟器进行真实空间太阳辐照外热流模拟,结合摄影测量方法对天线热变形进行高精度测量。将该方法应用于某天线的地面热变形测量试验中,能够较为真实地模拟天线在轨热效应,同时能够高精度获取天线在模拟外热流环境下的热变形数据,为天线结构热设计和热复核提供了翔实的试验数据支撑。试验数据表明:典型工况下的变形实测数据与仿真数据基本相符,验证了热效应模拟和测量结果与仿真数据的一致性,在天线1.5m 口径范围内的变形测量精度优于15μm(=2),满足试验测试精度指标要求。
太阳模拟器结合摄影测量的太阳辐照热变形测量试验方法可同时实现高精度外热流模拟和高精度非接触热变形测量,在对航天器复杂结构的模拟在轨热变形测试中具有显著优势,能够大幅提高模拟验证数据的准确性,具有推广应用价值。
