近场分析法在航天器磁测试中的误差因素及精度评估
2022-06-28吴卫权陈丽王浩孙晓春王韬周雪琴
吴卫权,陈丽,王浩,孙晓春,王韬,周雪琴
(上海卫星装备研究所,上海 200240)
0 引言
航天器磁性测量误差因素及精度评估与航天器结构尺寸、磁矩量级、内部磁性分布特征,以及所用的磁测试方法和测试设备等密切相关。常用磁测试方法中,球面作图法的误差主要是非偶极场带来的,而近场分析法(亦称赤道作图法)的误差则主要取决于磁测试条件和测试布局。中小尺度及以下航天器的整器磁性测试可在零磁环境中或地磁场环境下进行,而中等尺度及以上航天器的整器磁性测试仅可在地磁场环境下进行。当航天器不能作侧置态磁测试时,在零磁、地磁场中测试均存在水平和垂直分量磁矩测试计算方法不一致所造成的结果差异问题。实际的试验条件下通常较难获取理想的测量数据,在获得的有效数据结果中,随机误差往往比计算方法产生的误差大得多。随机误差取决于测试仪器设备技术指标和不同磁测试环境条件下传感器布局位置上测得的磁场信号数据。统计意义上的不确定度主要是由随机数据引起的。
本文针对航天器近场分析法磁测试中的系统误差、随机误差等因素进行逐一分析,并给出航天器磁测试结果有效性综合评估方法。
1 系统误差因素及精度评估
航天器磁测试系统误差的主要诱发因素为:
1)测试方法,包括:①由航天器尺寸和其自身的磁源分布特征引起的误差;②由磁矩计算方法(求解公式、方程阶数的选择等)引起的误差;③由磁传感器布局(传感器近场布局模式、数量、传感器与航天器之间测试距离、传感器与传感器之间间距比例等)引起的误差。
2)测试仪器、设备技术指标,包括:①磁场巡测系统性能(灵敏度、分辨率、量程、稳定性);②测距仪测量精度;③无磁转台角度测量精度;④零磁线圈系统性能(线圈均匀性、稳定性)。
3)中大尺度航天器无法侧置或倒置状态下进行磁测试时的垂直分量测试综合误差影响,包括水平与垂直向磁矩测试算法不一致误差、垂向感磁综合系数值的不确定性。
4)不同磁环境下航天器感磁影响的评估方法等。
1.1 测试方法引起的误差因素及精度评估
经典理论与实践经验表明,近场分析法的精度受制于2 个方面:
1)航天器尺寸和其自身的磁源分布特征
近场分析法中,航天器尺寸越大、磁矩分布越偏离航天器赤道中心,偏心引起的测试误差越大,尤其是大磁矩部件引起的偏心误差。理论上,当航天器尺寸增大,而传感器至航天器最小距离不变时,测试精度将随着航天器近场测距比参数(=/,其中,为航天器直径,为传感器至航天器赤道中心距离,0.4<<1.4)的增加而下降。这是由于偏离航天器中心的含有磁性部件单机的多极矩量值增加引起。测试误差随舱内磁源部件数量、位置、磁源强度和参数变化的机理复杂且规律难寻。应当重视的是,某些非常规动能类航天器中若使用大量软磁材料及与其相关的线圈绕组,由于软磁材料易受外部磁场变化影响而产生感磁矩,一旦形成不可逆成分,则软磁材料感生磁矩对磁测试精度的影响也不可忽视。对于该类航天器,必须根据软磁材料特性、其在舱内磁路的特征、与之相关周围通电线圈电流的大小、软磁材料在舱内安装位置及其所处磁环境等因素进行磁矩仿真计算、测试和预估。必要情况下须对该软磁材料进行饱和磁化例行试验以给出其对整器磁矩的贡献变化范围和确定性量值,并进行整器级不同工况下的验证试验(例如大矩类部件、磁力矩器等静动态工况下受软磁影响的线性度试验)。中大尺度大磁矩类航天器因磁化、偏心等因素引起的测试误差应进行单机或系统级专项磁测试分析评估。
2)近场方程求解的阶数和传感器布局方式
相对于航天器尺寸及自身磁源分布特征因素,近场方程求解的阶数、传感器数量及传感器位置布局等影响因素理论上具有较大可预测性,对测试精度的影响小于前者。
①近场方程计算磁矩模型分析
为便于近场分析法误差的直观分析,将近场方程求解理论模型简化为

式中:(r)为理论上由航天器偶极子矩和多极子矩产生的场强值;为近场方程求解阶数,=1,2,3,…;r为航天器赤道面上传感器距航天器中心的距离,m;为赤道面上与航天器最靠近的传感器距航天器中心的距离,m;r为传感器间测距比,r=r/r;(r)为磁强计采集值,nT;(r)为磁强计采集波动值,nT;(r)为磁强计采集最大值,nT;(,ri,rmin,rij,B(ri),B(ri)f,(r))为与方程求解阶数、测试距离、最小测试距离、传感器间测距比及磁强计采集值等参数相关的系数;为航天器偶极子矩,A·m;为航天器多极子矩,A·m,=1,2,3,…。
由式(1)可知:理论上,距航天器中心不同测试距离处的磁场强度由偶极子矩和多极子矩产生,它与方程的求解阶数、测试距离、最小测试距离、传感器之间测距比等参数密切相关;随着测试距离增大,多源偶极子组合下偶极矩>>其他多极矩,则可认为采集的磁场强度主要由偶极子矩产生。
运用模型分析计算可知,在确保传感器获得有效信号数据的情况下,随着方程阶数(二阶以后)的增加,计算获取的磁矩结果精度也随之有所提高。对一个特定航天器产品和给定的阶数来说,相同的传感器测试布局下,绝对精度将保持不变;当阶数增加时,绝对精度可获得一定改善。但是,一旦传感器获取的信号数据不理想,方程阶数的增加与测试精度的相关性将失去意义。进一步数据计算结果表明:当传感器布局方式确定实施后,再次改变方程阶数获取计算多极子场与中心偶极子场的变化情况可以发现,即使在传感器信号并不理想的情况下,由方程阶数变化引起的计算误差对偶极子结果的影响还是较小的。
航天器磁测试中,近场方程以某低阶数(=1,2)计算得到值的精度通常不差于使用完好数据取高阶计算得到值的精度。这一现象是由于精度受随机磁场值影响,起因与每组数据的随机值的误差不确定性点,即与测试设备量程、分辨率、稳定性及随机干扰等因素有关,也与特殊布局下测距比例因子相关。由于布局位置的不同,这种不确定性随场的量级变化而变化。假定所有布局的传感器所获得的场强信号均真实有效,在计算时所采用的信号数据为理想状态,则所有方程权重是相等的,通常这种理想状态是很难获取到的。由于每组近场方程的误差权重随每一组传感器布局而不同,在较近的传感器布局获取场强的量值更高,与上述误差因素量值相比,这些传感器相关方程的误差权重小于较远的那些传感器的,这就意味由较近传感器引起的系统误差将相应减小。
假定磁测试系统所获取的航天器磁场数据真实有效,则给定的计算方程在满足二阶条件下可获得足够有效的磁矩测试结果。在给定的传感器布局方式下,用中国计量科学研究院标准磁矩模型进行校准试验,近场方程求解阶数(取二阶)对系统误差的影响小于1%。
②磁传感器布局方式
在工程实际应用中,通常传感器位置布局应满足近场测距比规则,即0.4<<1.4。测试距离增大,偶极化程度增强,但采集信号会减弱且信噪比减小,测试误差将随之加大。因此,为了获得足够高的测试精度,测试距离的选择与信噪比两者必须综合考量——既要保持适当远距离、又要采集到足够大的信号强度(测试距离以及场强信号最大值、波动值等均是与测试误差因子有关的权重因素)。磁强计的灵敏度决定了它能放在离航天器多远距离处(应尽可能地远)。表1 列出了近场分析法中传感器“一”字布局方式下几种典型的传感器之间测距比模式。
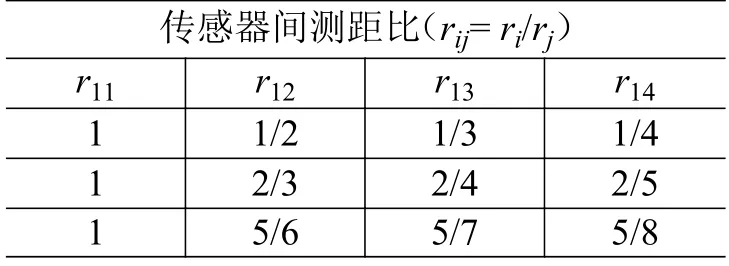
表1“一”字布局方式下几种典型的传感器间测距比参考值[3]Table1 Typical referenced values of probe in a straight configurations[3]
在“一”字布局方式下,随着传感器间测距比r减小,近场测试精度相应下降;当对某个多偶极子矩部件源进行测定时,测试精度下降的现象将显现。这种变化效应仅在传感器间距极小时敏感和重要。通常传感器间距与测试精度变化关系是比较复杂和难以预估的,但可以肯定的是传感器间测距比不是测试误差最关键的影响因素。
在“一”字布局方式下,对一个特定磁源测试获得的某磁轴上的偶极矩结果表明:排除航天器尺寸和其自身的磁源分布特征因素,与测试设备量程、灵敏度、分辨率和稳定性等技术指标相比,预想计算结果中已有的系统误差变化通常很小。在试验环境、设备有效保障的前提下,且获得的数据信号理想时,“一”字布局方式下近场分析法引起的不确定度理论上优于10量级。
理论和工程实践表明,如果传感器所采集获得的数据真实有效,近场分析法是一种经典、有效和简便的航天器偶极子矩测定方法。
1.2 测试仪器设备引起的误差因素及评估
测试仪器设备引起的测量误差主要有:磁强计测量误差(分辨率、量程、稳定性、传感器正交度);传感器轴取向(无磁转台轴与传感器方向之间正交度)误差;测距仪测量(传感器距离定位)误差;无磁转台测角刻度误差、转台旋转时指针与角度刻度线同步校准误差;零磁线圈系统(磁场均匀性和稳定性)误差(此项误差因素仅针对零磁环境下中小尺度航天器及产品磁测试)等。
现以近场方程取阶数2 为例,进行测试误差分析如下:
由近场方程积分求解,可预估得到误差扰动近似模型:

式中:为航天器磁矩,A·m;为传感器获得的航天器磁感应强度,nT;为无磁转台测角度数,(°);为航天器与传感器之间距离,m;d、d、d、d分别为相对应的测试误差。
磁强计综合测量误差:d/≤1%(选择中高精度以上类设备);
传感器轴取向误差:优于1‰(利用地磁东西向磁场为0 的特征,取地磁场30000nT,归零(趋近于小于10nT 取向后);
测距仪测量误差:d/≤5‰(取d=1cm、r≥2m中位数计算);
无磁转台测角刻度误差、转台旋转时指针与角度刻度线同步校准误差:d/≤1%(d=0.1°、角度间隔=10°计算);
零磁线圈系统(分辨率为0.1nT;稳定度为±2nT/h;不均匀度为1×10)误差:按最常规典型的软磁体硅钢材料(普遍使用于传感器、继电器、动能类载荷部件中)起始磁导率=450 评估计算,航天器受零磁线圈均匀区内产生的近零磁场的感磁影响可忽略不计,测试误差还是来自于线圈不稳定性产生的波动磁场(波动磁场对测试误差影响分析见第2 章)。
1.3 航天器正置态测试时垂向磁矩测试误差因素及评估[1]
1)垂向磁矩测试和计算方法误差
①中大尺度航天器垂向磁矩测试和计算方法误差系数()
随着航天器的体量越来越大,受限于零磁线圈产生的零磁空间,中大尺度以上航天器整器不得不在地磁场环境下进行磁性测试。同时,考虑到试验时航天器产品的可靠性和安全性,航天器往往只能以正置(不允许侧置或倒置)状态进行磁测试。由于近场分析法在水平面内和垂直方向所用的磁场、磁矩数据处理方法和计算公式不同,在正、侧置两种不同状态下测试时,零磁场中正置态下垂向永磁矩测试结果和地磁场中正置态下垂向永磁矩、感磁矩测试结果与侧置态下零磁、地磁两种环境下的垂向测试结果相比均存在测试计算误差,这一误差评估与航天器尺度、内部所含部件单机磁矩及分布情况等有关。航天器值获取的基本步骤为:
a.在不同尺度航天器结构壳体内及各象限面上,布局各种规格的标准磁矩,建立不同尺度和磁矩量级的航天器标准磁矩模型;
b.航天器标准磁矩模型正、侧置态下磁矩测试;
c.航天器标准磁矩模型正、侧置态下磁矩测试结果的比对分析;
d.航天器值获取。
为验证上述值获取方法的合理性,兼顾最大误差裕度范围,整器标准磁矩模型尺度按实际航天器壳体尺度,模型中安置的标准磁矩样本数量≥航天器舱内实际磁源部件数量,磁源布局位置可随机分布但也须兼顾外层边缘位置布点数量,传感器布局严格按不同尺度航天器整器磁测试时的布局方式。因此,考虑到常规的误差评估,上述误差预估要大于或者涵盖实际的航天器误差阈值范围。
②水平向与垂向测试和计算方法区别
考虑到航天器水平方向和垂向磁矩测试计算方法的差异,通常在航天器尺度、传感器布局、求解方程阶数等相同确定条件下,在对应的磁轴上,赤道面水平向测得场强能给出更多的航天器内部磁源磁场分布信息及求解方程数量和方法,而垂向测得场强仅为航天器垂向场强的简单算术平均。因此,为了获得更好的测试精度,特别对于大尺度航天器(排除分舱测试方法)而言,为了减少偏心误差的影响,在条件允许情况下,应尽量采用长轴卧置于赤道面测试状态下进行测试的方法。
2)航天器及部件单机垂向地磁感磁误差
①中小尺度航天器及部件单机垂向地磁感磁误差系数()
在零磁环境中进行航天器磁性测试可避免地磁对航天器产生的感磁影响,可供某些有零磁环境及其他磁模拟环境需求的中小尺度及以下航天器整器和系统级产品进行一些非常规类磁检测项目模拟试验。在地磁场中进行磁性测试的中小尺度航天器,由于其置于地磁场中,将遭受地球南北向和天地方向磁场的磁化作用而感生磁场。感生磁场的大小取决于航天器自身所含软磁产品数量及所处地磁场环境(考虑评估裕度,一般取地磁场强度最大值7×10T进行计算)等因素。在测试地点、测试方法、传感器布局明确及测试仪器设备定型后,由地球天地向磁场产生的感磁是影响航天器垂向磁性测量的因素之一(因为垂向测试误差中含有水平与垂向测试计算误差及某些大磁矩部件引起的方法误差的综合影响,此处须强调的是,应避免航天器磁测试中过度考虑地磁对航天器的感磁影响)。
为避免航天器受地磁场感磁影响,水平面南北方向的感磁可通过地磁东西向为0 的特征,将南北向磁矩结果减去东西向磁矩结果后获取;天地方向感磁可通过试件侧置和倒置的测试结果相减获取。通过对航天器、、三个方向上的剩磁场和感磁场进行分离测试和组合计算,可获取其剔除了地磁场微弱感磁影响后的磁特性。中小尺度航天器及部件单机值获取的步骤如下:
a.地磁环境下,中小尺度航天器及部件单机正、侧、倒置状态下,部件水平面、分量和垂向分量静、电态磁矩的测试和获取;
b.零磁环境下,中小尺度航天器及部件单机正、侧、倒置状态下,部件水平面、分量和垂向分量静、电态磁矩的测试和获取;
c.地磁和零磁环境下,中小尺度航天器及部件单机正、侧、倒置状态下,部件水平面、分量和垂向分量静、电态磁矩比对;
d.中小尺度航天器及部件单机值获取。
上述零磁和地磁场中磁测方法是中小尺度以下航天器及部件单机常规测试项目磁场和磁矩测定时最常采用的测试方法,两种磁环境下的测试误差(在获取的测试数据完好有效条件下)评估相差在2%以内。
②中大尺度航天器垂向综合误差(计算方法误差+地磁感磁误差)系数()
地磁环境下中大尺度航天器正置态测试时,无法如中小尺度航天器及部件单机那样进行倒、侧置态测试及对地磁和零磁两种环境下的垂向测试结果进行复核比对验证,因此,如前所述垂向测试结果的影响因素已不仅仅是单一的地磁感磁,而是涉及了水平、垂向磁矩测试计算方法差异等诸多综合因素。特别对于航天器非侧置态下的磁矩测试,由于近场分析法在水平面内和垂直方向所用的磁场、磁矩数据处理方法不同,零磁场中垂向永磁矩测试结果和地磁场中垂向永磁、感磁矩测试结果均存在一定的测试计算误差。这一误差评估必须与航天器尺度、大磁矩部件数量与位置、航天器自身内部含有的磁性部件材料性质与数量、部件材料在航天器内部所受磁环境(强度和方向)、磁场数据和磁矩计算处理方法、航天器测试场地所处磁场环境、测试转台磁性等因素综合考量。中大尺度航天器值的获取步骤如下:
a.按1.3 节1)中①方法,获取中大尺度航天器值;
b.按1.3 节2)中①方法,获得中大尺度航天器常规部件单机分布规律及其均值;
c.对非常规类大软磁体部件单机进行不同磁环境充退磁试验,获得其磁矩变化范围和饱和磁矩最大值,以及垂向最大感磁系数;
d.综合b、c,获取中大尺度航天器垂向地磁综合感磁系数上下限量值范围;
e.综合a、d,获取中大尺度航天器垂向综合误差系数(+)上下限量值范围;
f.中大尺度航天器获取。
1.4 不同磁环境下航天器感磁影响的评估
1)航天器自身磁场引起的感磁影响
航天器自身磁场引起的感生磁场的大小取决于:①航天器自身内部感磁材料的特性和数量;②软磁材料所处磁环境(自身通电线圈匝数、电流大小、与磁力矩器距离等因素)。常规类航天器内部感磁材料(软磁体)量少质轻,其感生磁场较微弱;非常规动能类航天器内部感磁材料的磁特性变化复杂、数量较多(经验表明,感磁材料的增加将导致整器磁性不稳定性的增加)。对于该部分软磁材料可在地面预先进行整器或部件单机仿真计算,单机部件材料专门的充退磁和磁饱和度试验,整器不同通电工况测试和试验验证,在综合考虑和叠加计算航天器内部多种大电流通电工况磁场环境影响条件下,摸清材料的感磁矩变化范围、饱和磁矩的最大量值等磁性参数特征。
2)航天器在地磁场中的感磁影响
航天器在地磁场中进行磁测时,在获得永磁矩的同时也获得由地磁场的磁化引起的感磁矩,可由下面的经典公式估算出航天器整器的平均体磁化率和平均导磁率:


进而可通过公式转换得到航天器感磁矩与所处环境磁场之间的估算公式

式中:为航天器在地面测得的感磁矩,A·m;为估算的航天器在空间轨道上的感磁矩,A·m;为航天器在地磁环境下所受磁感应强度,nT;为航天器在空间轨道上所受磁感应强度,nT。
由式(6)可知:由于中低轨道的地磁场值与地面地磁场值比较接近,对于围绕地球运行的中低轨道航天器,在地磁场中进行干扰场试验时,由地面磁强计测得的干扰场值比在零磁环境中测得的更能真实反映器载磁传感器在轨所受的干扰磁场情况。
3)在其他星体磁环境下的感磁矩
对于探测木星类航天器,通过式(6)的平均估算,可得到相应磁环境下航天器所受感磁矩量级。虽然该类航天器所处磁环境与地球磁环境相比量值大数倍,但在总体探测技术指标相对误差值不变条件下,其器载磁传感器的量程和分辨率绝对值也相应放大,因此对航天器干扰场的绝对测试误差可适当放宽。
2 随机误差因素及评估[3 ]
航天器磁性测试时,随机误差由磁测设备稳定性、零磁线圈磁场波动、环境磁场波动(地磁、航天器周围磁环境)、航天器自身磁场随机性(电机转动、电流交变场、各种频率电磁场等)、无磁转台旋转过程中指针与角度读数偏差等引起。在测试方法、测试地点、测试距离明确及转台、测试仪器定型后,随机误差是影响航天器磁矩测试精度的主要因素。在航天器磁测试工作状态不变情况下(同一工作状态多次重复测试),排除无磁转台旋转过程中指针与角度读数偏差等人为因素后,零磁线圈磁场及环境磁场波动是影响航天器(尤其是大尺度航天器)磁矩测试精度的主要因素。

假定航天器磁矩试验结果按进行估算,式中:为试验获取的航天器磁矩,A·m;为航天器真实磁矩,A·m;为磁矩测试误差,A·m;为与测试距离相关的常数;为航天器实际环境磁场产生的磁感应强度,nT;为环境磁场波动引起的磁感应强度,nT;为传感器中心到航天器中心的距离,m。可以看到,磁矩误差值与磁场波动值及测试距离的3 次方成正比。因此,对于大尺度航天器,相应测试距离增大,引起的误差也更大。
一般在磁测试周期内,需对环境磁场进行同步监测。若转台转动1 周(0°~360°)后传感器测得的环境磁场波动小于3nT,则测试周期内采集的磁场数据及磁矩计算结果为有效。
表2 列出了测试环境磁场波动小于3nT 的情况下,采用偶极子作图法计算公式得到的测试距离与试验结果不确定度的一组参考值。

表2 环境磁场、测试距离与试验结果不确定度关系Table2 Dependence of test uncertainty on environmental magnetic field and test distance
在地磁环境下进行航天器磁测试时,由于数据采集系统采用了环境磁场波动闭环跟踪补偿控制技术,即计算机根据监测环境磁传感器获得的干扰源磁场数据对测试航天器磁场传感器同步获得的磁场数据进行实时补偿和修正,可将补偿和控制后的磁场波动量值限制在0.2~0.5nT 范围内,大大减小环境磁场波动对磁矩测试精度的影响。
3 测试结果有效性综合评估
3.1 磁场测试数据和磁矩计算结果有效性评判
1)测试设备、测试方法、传感器布局等有效性评估
①试验前,用标准磁矩或通电标准线圈对磁场测试设备进行校核,以确认其是否满足系统误差小于1%~2%的要求。
②确定地面测试传感器数量、传感器布局方式,并根据航天器尺度,判定传感器布局位置是否满足近场分析法测距比规定,即0.4<<1.4。

④确定地面测试传感器磁轴与地磁场磁轴、航天器磁轴的零位及正交性一致状态。
2)试验过程中采集数据、计算结果有效性评估
目前,近场分析法最常规的传感器布局方式是在航天器赤道面上距其中心不同距离处呈“一”字排列4 个传感器。航天器在无磁转台上绕垂直轴转动1 周(0°~360°),传感器采集航天器赤道面上不同角度点的场强值,完成1 次完整的测试工况。在确定的近场方程阶数下两两计算传感器采集数据求解出航天器磁矩结果。每次测试工况计算获得一组6 个磁矩计算结果(满足CNAS 实验室规范标准的最小统计样本要求),取中值后作为航天器在某工况下的完整测试结果。
在上述测试过程中,为有效消除系统误差和随机误差对测试结果的影响,力争获取近场分析法所需的“有效数据信息”,保证航天器磁场测试数据和磁矩计算结果的有效性,须同时满足如下条件:
①无磁转台每旋转1 周(0°~360°)完成1 次完整的工况测试回归后,采集系统中各通道采集数据中0°和360°始末场强数据变化值应<3nT。此即通常所称磁场测试数据“回归好”。
②无磁转台旋转1 周(0°~360°)完成1 次完整的工况测试回归后,近场方程计算获得的6 个磁矩结果须基本保持一致,取中值后获得第1 次测试结果。
③再重复上述步骤②的测试过程,获取第2 次测试结果,然后评估这2 组测试结果的一致性,若一致性较好,则该工况测试结束。此即通常所称磁矩测试结果“一致性好”。
④否则,重复该工况的第3 次测试,然后选择2 组较接近的测试结果平均后作为最终有效结果,结束该工况测试。此即通常所称磁矩测试结果“3 取2 原则”。
3.2 综合误差的评估
对于中小尺度以下航天器,近场分析法的测试精度受系统误差、随机误差等影响相对较小。不同传感器数量、不同布局方式、不同测试距离条件下的测试结果表明,测试精度随这些参数变化而略有相应变化,但变化通常是较小和可控的。对中等尺度以上航天器,在1.1 节1)中所述条件约束下,近场分析法的测试精度受系统误差和随机误差的影响明显加大。特别是非常规类航天器(在偏离航天器赤道面位置安装有多种大磁矩部件),即使磁矩测试结果同时满足上述3.1 节2)中所述的4 个数据有效性判定依据条件,仍有可能无法得出较真实的航天器磁矩结果。由于上述系统误差和随机误差因子的权重比相互影响、相互牵制,所以航天器磁测试过程的误差分析须对各因素综合考量,必须进一步分析评估航天器各舱内系统及部件单机的磁矩量值和分布情况并结合传感器布局方式来确定其磁矩偏心误差系数。目前,针对含有多种大磁矩部件的动能类航天器、火箭末子级类平台组合体,采用在航天器赤道面上下多层或错层布局传感器的近场分析法可代替航天器分舱测试方法,有效获取偏心等因素引起的误差。
根据工程经验和大量试验结果,表3 给出了不同尺度航天器磁测试误差预估参考范围。需要特别指出的是:对于某些大尺度及以上、含有多种偏心大磁矩磁源(软硬磁源)的非常规类航天器,在获得的磁测试数据不理想的状况下,可能还会产生更大的测试误差。除了增加特殊传感器布局测定其磁矩偏差外,工程上常采用最大磁补偿方法减小航天器垂直轴磁矩绝对量值改善该轴相对误差偏大所引起的不确定性,以满足整器磁矩总体测试指标要求。

表3 不同尺度航天器磁测试误差预估参考范围Table3 Estimated error range of magnetic test for spacecraft of different size
4 结束语
随着国内大功耗、大电流遥感类、大磁矩动能类等各种航天器的设计、研制和生产,航天器磁性控制、试验评估技术也遇到了一些新情况。针对此,本文借由国内外航天器磁测试积累的成功经验,总结了该领域的一些新技术及方法,就航天器磁测试中的误差因素评判、精度评估等问题进行了详细分析解剖,对于优化完善国内航天器磁测试误差评估技术、助解相关飞行器设计师系统在航天器磁试验中的某些疑惑具有积极意义。
