基于有限元法的水下绝缘体小目标电磁场探测方法仿真研究
2022-06-28高俊侠王君楷
高俊侠,王君楷,易 忠
(1.北京工业大学,北京 100124;2.北京卫星环境工程研究所,北京 100094)
0 引言
近年来,我国对水下目标异常体的探测越来越重视,探测目标由导电体逐渐向绝缘体转变。由于水下环境干扰严重、可视范围较小,对于小尺度目标的探测一直是水下检测领域的难题之一。例如声呐法,由于浅海强噪声、强混响和强杂波背景的影响,其对于小目标检测分辨率较低,很难保证正确跟踪。电磁勘探技术可有效应用于水下目标的探测,从而有助于维护我国海洋主权和权益;但该技术之前主要用于对潜艇等水下大型目标或金属目标的探测,对如蛙人和玻璃承压球等水下小型非导电异常体(也称绝缘体小目标)的探测鲜有涉及。
要实现对水下绝缘体小目标的探测,首先要确定电磁探测系统的关键部分——电磁信号发射源的参数,包括发射电流、发射频率以及排列方式等。因实际探测条件有限,故考虑先进行仿真分析以验证探测方法的有效性。电磁场数值仿真软件有许多种,如美国Zeland 公司开发的基于矩量法(MoM)的集成全波电磁仿真优化包(IE3D),德国Recom 公司开发的基于时域有限差分法(FDTD)的三维全波电磁场仿真软件,丹麦奥胡斯大学Hydro Geophysics Group 开发的电磁模型分析软件Electro Magnetic Model Analysis(EMMA),美国Ansoft 公司基于FEM的电磁场仿真工具(HFFS)等:这些软件多数只适用于高频电磁波及电机模型,不适用于海洋模型。电磁场仿真软件ANSYS Maxwell具有灵活的建模能力,采用有限元方法计算分析,可保证良好的计算精度,常被用于稳态电磁场的分析求解。
本文尝试将ANSYS Maxwell 软件引入水下小目标磁场探测方法的分析,以有限元法为基础,采用理论分析和仿真计算,研究通过布置“激励—响应”设施探测有限海域内绝缘体小目标的有效方法。首先,采用该软件分别对350m×35m 和350m×350m×35m 的海域建立二维和三维仿真模型;然后利用有限元离散形式将模拟的磁场转换为矩阵计算,量化处理水下有无绝缘体小目标时的磁场数值;通过比较不同电流及不同水面高度/水下深度有无绝缘体小目标的磁感应强度差值来判断有无绝缘体小目标通过。
1 总体方案设计
首先,本文利用等效原理,引入基于有限元分析方法的Maxwell3D 软件电磁模拟方法对待分析水域进行结构建模,建立水下绝缘体小目标电磁探测装置3D 模型,模型中以导线中的电流作为激励,以不同水深处电磁信号接收点测量的磁感应强度作为响应。将3D 建模结果导入电磁仿真软件ANSYS Maxwell,进行前处理;并使用ANSYS Maxwell 进行仿真域内模型的网格剖分,进行电磁仿真后处理。继而逐一改变激励与电磁信号接收点的参数,分别对仿真模型进行多次电磁数值模拟,以确定合适的电磁信号发射源参数和接收参数。根据多次磁场数值模拟结果,研究有、无绝缘体小目标时发射/接收信号的差异性,并对其进行初步量化处理,判断是否能够对水下绝缘体小目标进行有效检测。
应用ANSYS Maxwell3D 软件进行建模仿真流程如图1 所示,主要有以下几个步骤:
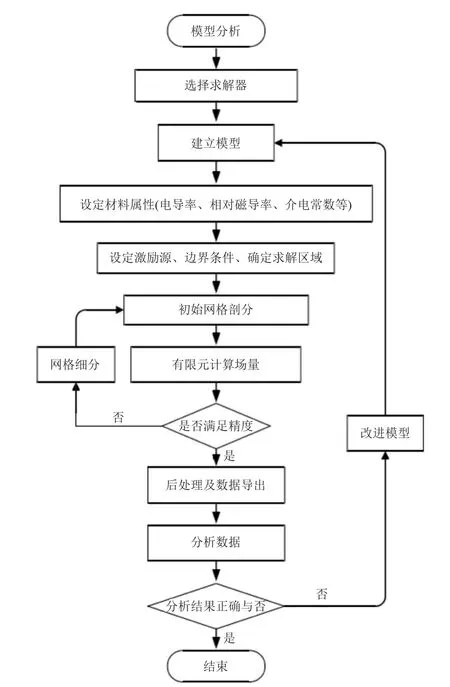
图1 ANSYS Maxwell 建模仿真流程Fig.1Flow chart of modeling simulation by using the ANSYS Maxwell software
1)模型分析。建模前需确定模型中如模型尺寸、材料属性、建模维度、激励源、边界条件、求解区域和求解器类型等参数。
2)建立模型。利用Maxwell3D 的Modeler 编辑器建立模型,按照模型分析时确定的参数进行模型参数设定。
3)模型计算。对建立的模型和求解区域进行初始网格剖分。ANSYS Maxwell 可根据提前设定好的误差精度自动进行网格细分,以便达到精度要求。
4)分析数据。计算完成后,可以得到磁感应强度分布的云图、曲线图及数值表等多种结果形式;还可以根据需求进行数据再处理,求解出最终物理量。
2 海域模型的建立
2.1 二维模型
首先应用ANSYS Maxwell 软件建立海域二维模型,分析二维情况下海域中有无绝缘体小目标时磁场的变化。以350m×35m 的海域建立二维模型,如图2 所示,模型顶线代表水面;如果在水下导线中通交流电,则在海水中存在涡流损耗,因此选择通直流电,即激励源设定为直流源;边界条件为零磁边界;有限元计算场量为磁感应强度;材料属性为一根半径10mm、纵深350m 的铜导线,经研究分析,放置在水下35m 处中间位置;绝缘体小目标设在水下17m 处,取普通人的身形尺寸,设其长1.7m、宽0.4m、高0.15m,如图2 所示。
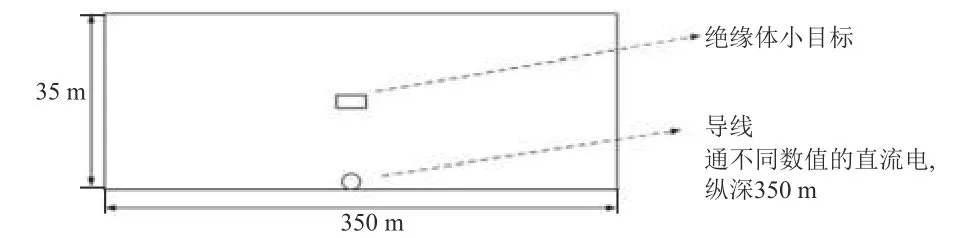
图2 海域二维模型描述Fig.2 Two-dimensional model of a rectangular sea area
2.2 三维模型
在二维模型的基础上建立三维模型,分析三维情况下海域中有无绝缘体小目标时磁场的变化。以350m×350m×35m 的海域建立三维模型,如图3 所示,其中:仿真域高度70m;观测面距离水面上方15m,横向以10m 为间隔共设置36 条观测线;激励源距仿真边界175m;参数设定同二维模型;绝缘体小目标尺寸及设置不变。
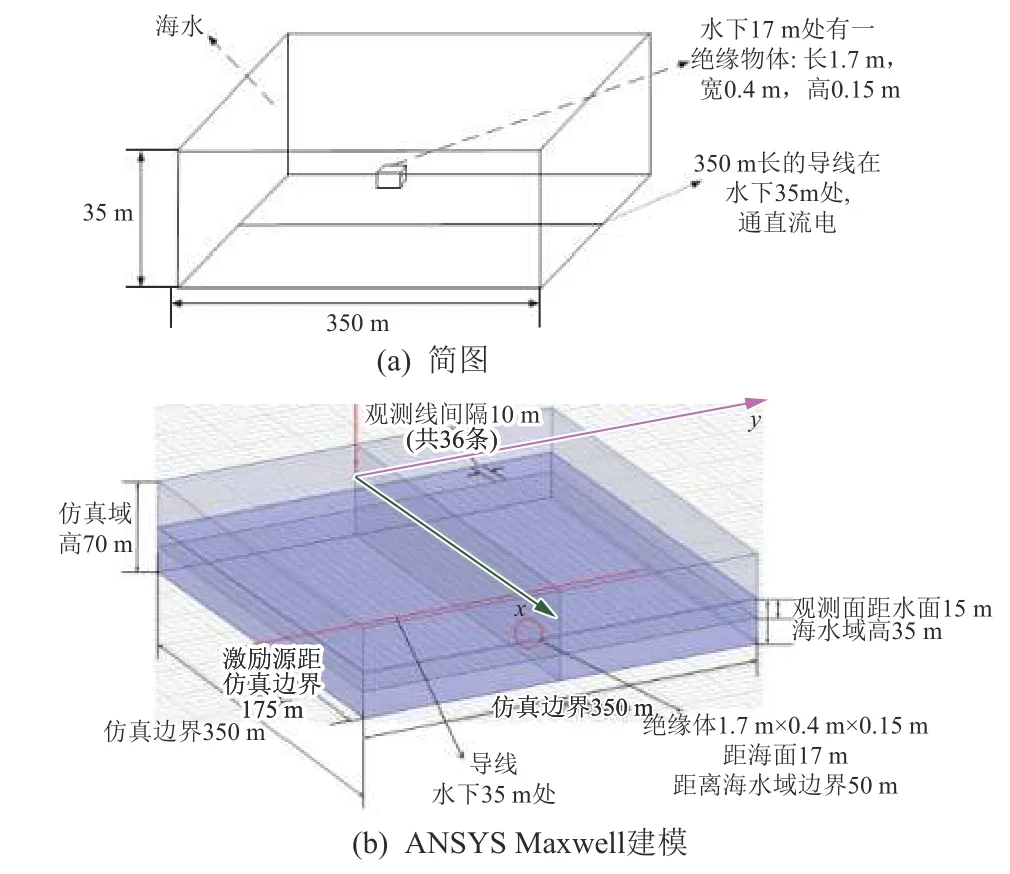
图3 海域三维模型Fig.3 Three-dimensional model of a cubed sea area
3 磁场数值模拟
在二维模型中,为了确定能够探测出有无绝缘体小目标的导线通电电流,首先逐一改变磁场信号发射源与磁场信号接收点的参数,电流分别取直流20A、40A、60A、100A 和200A,分别模拟水面、水下15m 和水下35m 处有无绝缘体小目标时的磁感应强度数值;然后将模拟出的有无绝缘体小目标时的磁感应强度对应做差值(由于篇幅原因,二维模型的仿真结果在此不列举)。结果表明,当水下导线电流为200A 时,差值大于0.3nT(磁场接收器能够测量的数值),即可探测到有无绝缘体小目标通过。
根据二维模型的磁场数值模拟结果,在三维模型中只需模拟水下导线电流为200A 的情况即可。分别对水上10m、水面,以及水下10m、20m 和35m 处有无绝缘体小目标的的磁感应强度数值进行模拟,生成了磁感应强度标量图、矢量图和分布图。由于篇幅原因在此只列举有绝缘体小目标时的磁感应强度分布图(如图4 所示)。
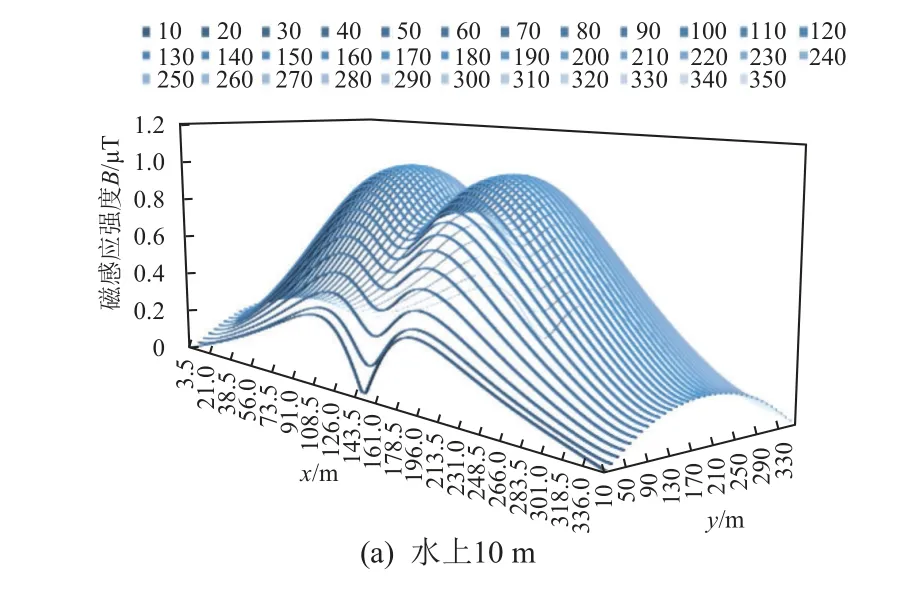
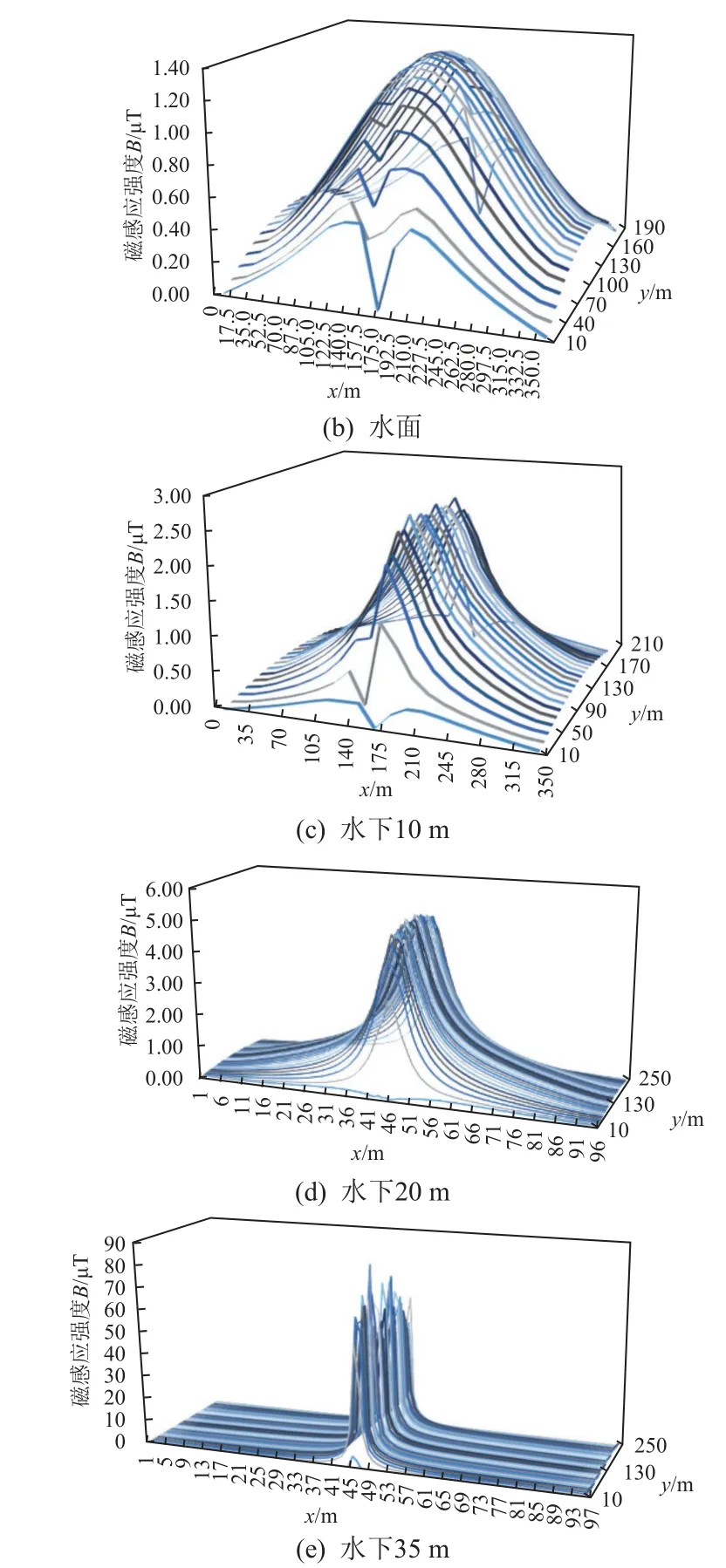
图4 不同水面高度/水下深度有绝缘体小目标时磁感应强度分布Fig.4 Magnetic induction intensity distribution at different water heights and depths of the insulator small target
将模拟出的不同高度/深度下有无绝缘体小目标时的磁感应强度分别做差值,结果分别如图5(a)~(e)所示。
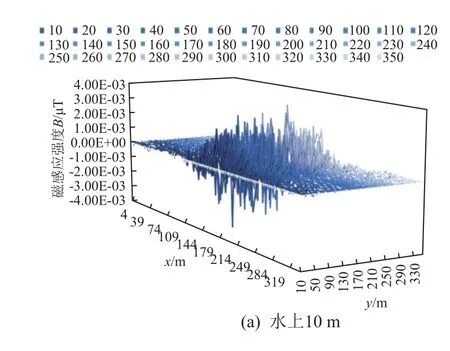
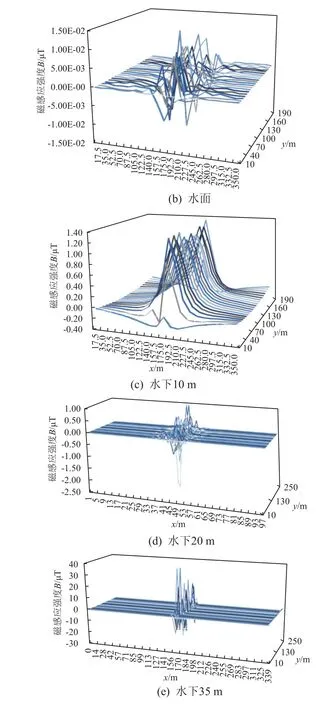
图5 不同水上高度和水下深度有无绝缘体小目标时的磁感应强度变化差值Fig.5 Difference values of magnetic induction intensity at different water height and depth with/without target
从上面的仿真结果可以看出:当水下导线中通200A 电流时,从水下35m 处至水面上10m 处均可测出有无绝缘体小目标时磁感应强度的差值,且差值大于0.3nT;绝缘体小目标越接近导线,磁感应强度差值越大,测量效果越好。
4 结束语
水下绝缘体小目标探测是目前的研究热点,为此本文提出一种电磁场探测方法,即布置“激励—响应”设施,用大功率发电机为导线提供直流电作为激励,采用磁力仪作为探测器,通过多点布局探测器来实时监测磁场变化,以探测是否有目标通过。为验证该方法的可行性和有效性,本文对其进行仿真验证。首先利用ANSYS Maxwell 软件进行了模拟仿真,并利用有限元法将计算区域剖分,将模拟的磁场转换为矩阵计算,量化处理水下有无绝缘体小目标时的磁场数值。仿真结果表明:本文所提出的电磁场探测方法不受海洋背景噪声的影响,能够实现对水下绝缘体小目标的有效检测;根据仿真结果可以得出实际测量时的所需的激励电流值、导线布置位置和探测器布置位置等,为实际条件下的探测打下了基础。
对于本文提出的水下绝缘体小目标的电磁场探测方法,后续还有许多问题待深入研究,其中主要涉及各种因素对磁场的影响以及对多目标情况的判断处理等。本文研究成果可为后续水下小型非导电异常体的探测以及我国海域勘探开发提供技术支撑。
