楼梯攀爬机器人结构设计
2022-06-26邢一童刘丹宁于家骅赵鑫鑫
邢一童 刘丹宁 于家骅 赵鑫鑫
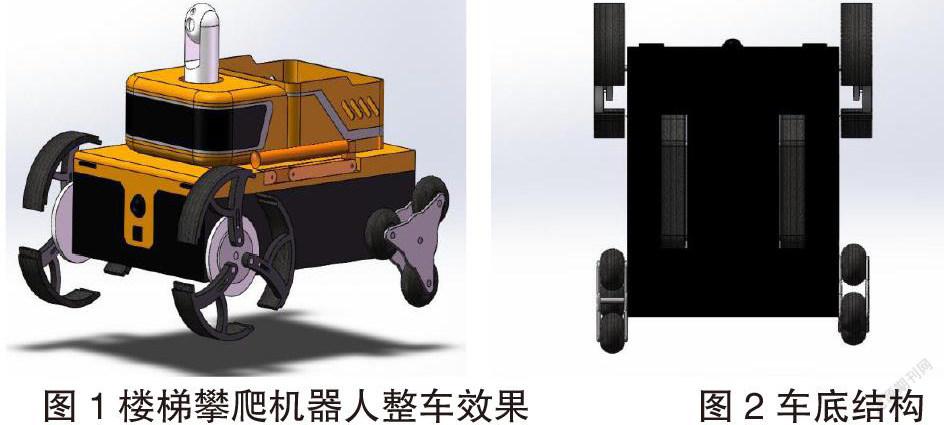
摘要:多功能楼梯攀爬机器人,旨在制造一个应用于更简便的上下楼梯机器人,楼梯间货物的运输,也可以应用于救援探测。因多功能楼梯攀爬机器人需要在室内承载负载并攀爬楼梯,故移动机构采用四轮式移动机构,两个变形轮为驱动轮,两个行星轮为从动轮,可更好的满足机器人的各种工作环境的要求,减少室内作业时候的转弯半径,通过前轮分散驱动,减少电源损耗,延长工作时间。基于此本研究提出一种将变形轮行星轮与履带相结合的复合式结构设计方案。
关键词:多功能楼梯攀爬机器人;超声波传感器;吸盘式机械手
1、引言
智能机器人的出现,正在慢慢的改变人们生活和工作的方式,在越来越多的方面呈现出巨大的亮点,比如在某些情况复杂的局面、崎岖不平的地形环境中替代人类工作。非结构化环境下智能移动机器人的研究对于拓展智能机器人的工作环境,以及在人类不舒适或无法接近的危险和困难环境中工作具有重要意义。智能移动机器人还可以用于工业生产中相对危险和困难的工作场所,提高工作效率和产品质量,改善工作环境,降低工作强度;其中,当智能移动机器人参与各种工作时,楼梯是人工环境中最困难、最常见、最特殊的障碍物之一。根据不同的应用环境和不同的操作要求,必须设计不同类型的移动机构来满足移动机器人的要求。越障机器人采用的运动结构形式主要有轮组式、履带式、腿足式、组合式和变结构式。该组合方法考虑了不同方法的优缺点,使机器人具有更好的灵活性和适应性,本文的楼梯攀爬机器人采用轮式和履带式组合方式。
2、总体设计
为了使履带式爬梯机器人具有平面全方位运动,实现爬梯功能,将总体方案设计分为机械结构方案和控制方案两部分。
其中机械结构包括楼梯攀爬机器人由两个变形轮为驱动轮、两个行星轮为从动轮、履带、超声波传感器、吸盘式机械手等组成。控制结构包括电机、电池、2.4G无线模块等。
机器人工作原理如下:
机器人首先通过已编好的程序将吸盘机械手处于放开状态,机械手到达物品所在的位置后程序启动使得吸盘处于吸附的状态,这时机械手将物品抬起或者放到车身上放的箱子中,此时在到达楼梯之前使用的是履带向前行驶,在到达楼梯之前的十米以内的距离超声波传感器即可将检测到的信息传递给运动控制模块,变形轮在这时通过运动控制模块下降代替履带进行爬楼梯,在到达楼梯顶部后变形轮这时会上升让履带作为主要行驶的轮子到达指定地点后将物品放下,即完成任务。
当某一地方发生灾害时为了防止人员的伤亡可以使用楼梯攀爬机器人,当到达需要检测的地点时,机器人通过上方的云台摄像头将检测地的实际情况记录下来通过内部的图像运输模块快速且准确的将内部的情况传递给救援人员在保证安全的情况下实施救援。
3、机械手机构设计
控制原理:机械手为气动射流程序控制,其动作程序:吸料—上升—伸出—放料—延时—缩回—下降—吸料。
具有攀爬楼梯功能的机器人设置有吸盘式机械臂,机械臂手设置在底盘的上表面,用以抓取和放置物品。其机械臂每个构件有个轴链接,多个范围可动,实现模仿手臂运动且方便收缩不占地方而且吸盘式机械臂通过编程来控制吸盘的吸放使得拿取物体更加的稳定。
4、电子硬件及控制部分的设计
整个机器人由24V锂电池供电,控制电路的每个部分由稳压电路供电。超声波测距传感器检测环境,陀螺仪加速度计接收机器人的位置角来调整重心;2.4G无线通信实现远程控制,单片机实现PWM和电平信号控制,驱动电路驱动变形轮、行星轮和轨道进行正确操作,以及吸盘式机械手对货物的拿取。
5、结论
该楼梯攀爬机器人能够应用于楼梯间货物的运输,也可以应用于楼房的或灾后的救援探測。本文利用变形轮、行星轮和履带的复合式结构,结合升降杆实现变形轮与履带的交替使用进行爬楼梯越碍的作用;通过超声波测距仪来判断是否到达楼梯底部(顶部),以此切换机器人的主要行驶轮,在车身部分设计了吸盘式机械手以便于更稳定的搬运货物。研究履带、变形轮、行星轮和一些辅助机构,对于机器人在恶劣环境、越障和运输重物等方面的工作具有重要意义。
参考文献:
[1]张阳阳. 阶梯攀爬机器人的控制系统研究[D].兰州理工大学,2016.
[2]杨萍,龚林强,施俊屹,曹强. 阶梯攀爬机器人结构及控制方案设计[J]. 机电工程,2017,34(06):557-561+572.
[3]李春玲, 一种用于阶梯攀爬机器人的变形轮机构. 甘肃省,兰州理工大学,2016-11-23.
[4]朱奋永,陈虎城,聂炜军,钱奕臣,黄相宁,黄军淋.一种轮履复合式爬楼梯机器人[J].装备制造技术,2020(05):35-39+43.
基金项目:2021年山东省大学生创新训练项目(S202113320023);2020年青岛黄海学院科技创新活动项目;2021年国家大学生创新创业训练计划项目.
作者简介:邢一童(2000.06-),女,汉族,山东曲阜人,大学本科学历,专业:机器人工程。
