航空精准施药航线实时导引系统研发与设计
2022-06-24北大荒通用航空有限公司
北大荒通用航空有限公司
□张伟巍
北京市农林科学院智能装备技术研究中心
□ 李鑫鹏 陶轩 徐刚 刘国驰 郑冠龙 张瑞瑞
农业航空施药是结合航空应用技术的新型农业施技术。相比传统人工施药和地面机械施药来说,作业效率高,作业质量好,防治效果好,广泛适用于高秆农作物作业,尤其在水田、丘陵山地、盆地、洼地、滩涂、沼泽等地块适用性更强。为保证航空施药作业质量,必须具备低空或超低空作业能力,且作业高度距离冠层不超过10 米,但极易发生安全事故。数据显示,有人驾驶飞机在施药作业过程中,发生剐蹭、撞障碍物、撞地等事故占比大约为80%。此外,当前控制施药作业精度主要依靠飞行人员作业经验,存在较多技术难点,容易造成实际喷洒轨迹与理论航线严重偏离现象,重喷率、漏喷概率较高。为了有效地解决这些问题,提高航空施药作业精度和作业效率,研发一种新型导航系统具有十分重要的现实意义。
在农业领域,有关农机车辆与有人驾驶航空施药飞机的导航监控终端系统研究较少,多数系统处于研讨阶段,投入使用量相对较少。
针对上述问题,本研究在基于Kalman 滤波器的组合导航技术和航线规划算法方面展开研究,设计并开发了航空施药导航系统,并在北大荒集团农场进行了大面积实验验证。
一、材料与方法
(一)基于自适应Kalman滤波算法的组合导航系统硬件设计
GNSS 全球定位导航还是INS 惯性导航都会不同程度地受到外界环境以及工作时长的影响从而导致定位精度不足。本文以有人驾驶航空施药飞机为平台,研究和开发一套多传感器融合的航空施药导航系统。采用捷联惯性导航(SINS)方式获取飞机的姿态角(航向角、俯仰角、横滚角)和三轴加速度,并计算实时位置和速度信息。通过引入卫星导航系统(GNSS)为处理误差随时间积累问题。硬件工作流程图如图1 所示。
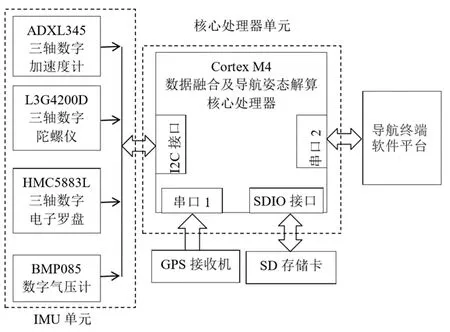
图1 系统硬件设计框图
(二)自适应Kalman 滤波算法设计
本文采用松散组合滤波器演算方法,根据SINS 采集到的姿态角和三轴加速度数据计算飞机速度和位置,并设计自适应Kalman 滤波组合导航算法融合GNSS 速度和位置数据,实现卫星/惯性组合导航系统。
其中SINS 采集到的数据包括实时姿态角(航向角、俯仰角和滚转角)、地理位置以及运动速度,通过以下处理步骤计算定位和测速:1.提取姿态角,2.计算运动速度;3.计算地理位置。
1.提取姿态角
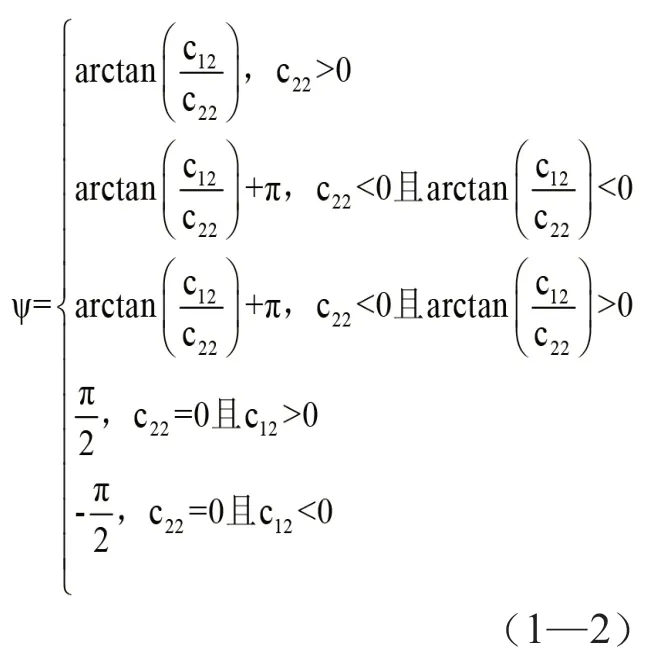
导航系统参数确定后,采用四元素算法计算空间坐标和导航坐标变化,按以下公式分别提取航向角ψ、俯仰角θ 和滚转角γ。

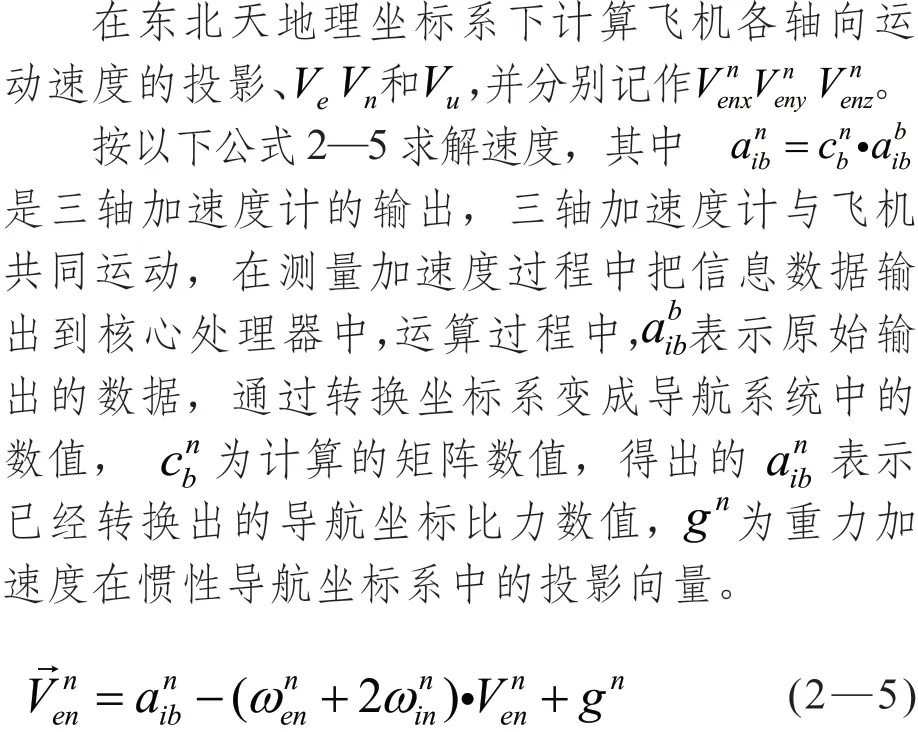
2.计算运动速度
3.地理位置计算
飞机载体飞行过程中的定位包括三个数值,分别是纬度lat、经度lng 以及高度h,通过确定这三个数值,能够确定飞机在三维空间中的位置,计算方法如(1—6)所示。
其中,lat0 为纬度初值,lng0 为经度初值,h0 为高度初值。
完成SINS 导航参数提取后,需要将之与GNSS 系统采集到的导航参数融合。为此,本文设计自适应 Kalman 滤波组合导航算法。
本研究导航坐标系使用东北天地理坐标系(ENU),以位置、速度、姿态角误差、姿态角漂移量、和三轴漂移量构建系统地状态参数矩阵Fk,,k-1,系统状态方程如公式(1—7)和公式(1—8):
将GNSS 在地理坐标系中的位置和速度输出分别表示成SGNSS和VGNSS,由公式(1—6)解算得到计算得到SINS 系统的位置和速度分别表示为SSINS和VSINS,。取 GNSS 输出的位置和速度,与SINS 输出的位置和速度做差,构建以差值为目标的观测方程。


考虑到参数仍然需要调和,保证计算过程符合实际情况,引入自适应因子αk调和动力学模型和观测信息,这样基于上面公式(1—8)和公式(1—9),可以得到离散的自适应 Kalman 滤波解为:
其中,Xk表示k 时刻状态参数的预测向量。
因为观测量维数小于状态参数的维数,需要构建在自适应因子中加入预报残差的统计量

则自适应因子αk可按公式(1-16)计算:
其中,c 是常量,取值为(0.85,1)。
(三)实验设计
由于现场实验中组合导航系统同时受到现场环境和飞行参数影响,很难控制实验条件和干扰因素。本文采用仿真计算方法验证组合导航系统的定位精度。本研究针对东北地区大面积航空施药实际需求应用组合导航系统开发了设计并开发了航空施药实时导航系统,如图2 所示。

图2 系统装机图
系统在北大荒通用航空公司所属罗宾逊R66和贝尔407 型直升机上装机4 套,在2021 年作业完成后对比装机与未安装导航系统飞机平均作业面积和作业时长验证系统实际工作效率,并回访飞行员了解其对本系统的意见和建议。
二、结果和讨论
具体演算过程和仿真结果如下所示,主要是根据滤波前后的位置误差比较,以及滤波前后速度误差比较:
图3中,在滤波前后位置误差比较中,黑线表示滤波前的位置误差,变化较大,随着时间延长,误差逐渐扩大的趋势,但是红线表示滤波后位置误差保持一个相对平稳的状态,虽然随着时间延长但是误差变化不对,相对稳定。
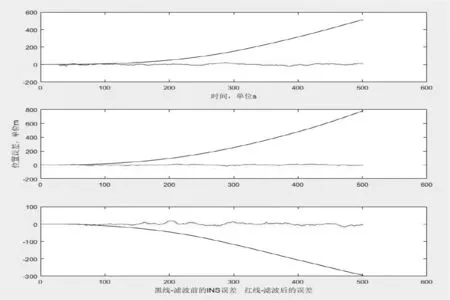
图3 滤波前后位置误差比较
图4中,滤波前速度误差黑线表示随着时间延长,变化相对较明显,但是滤波后的速度误差曲线则表示相对平稳,随着时间延长曲线没有活动幅度变化。结合滤波算法后,产生的位置误差和速度误差明显缩小,随着载体飞行轨迹拉长误差仍然保持在一定范围。这直接提高了飞行载体的测量精准度,能够更好地应用于载体飞行轨迹导航。
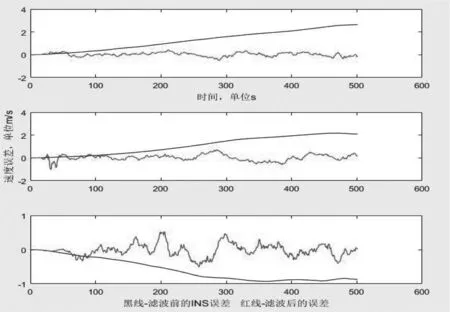
图4 滤波前后速度误差比较
由此得出结论,自适应Kalman 滤波算法可以保证误差扩大,并且随着时间推移仍然保持在合理误差范围,对于预测导航坐标起到很大作用。根据统计和预测,进一步将根据算法后得到的误差范围进行分析和绘制,变化曲线如图5 和图6所示。
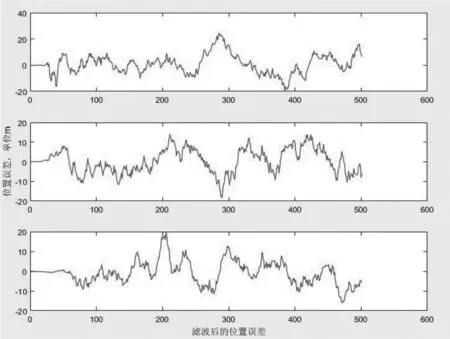
图5 滤波后的位置误差
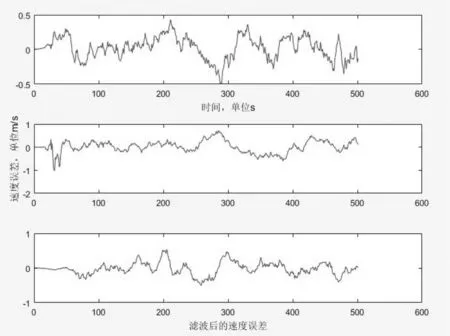
图6 滤波后的速度误差
为了放大仿真实验效果,将GPS 东北天方向上量测误差均方差的仿真参数设置为30m。经过500s 仿真滤波后,得到位置误差的统计结果如表1 所示,速度误差的统计结果如表2 所示:
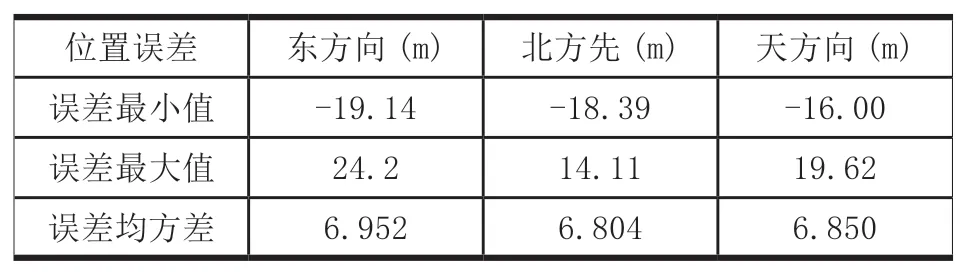
表1 滤波后的位置误差统计表
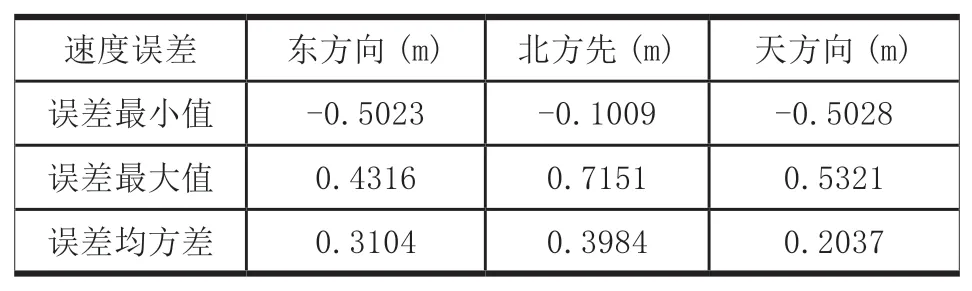
表2 滤波后的速度误差统计表
从表1 和表2 数据中发现,结合滤波算法降低了位置误差和速度误差,提高了导航精准度,并且弥补了产生的信息空缺,很大程度上使得飞行载体导航轨效率提高,能够将30m 的仿真误差控制在每个方向不足7m 的范围内,误差率降低了77%。
实际施药实验结果如表3 所示,测试组飞机2021 年平均作业面积较对照组多约8.7%,作业时长则短15.0%,平均每日作业面积增加20.6%。
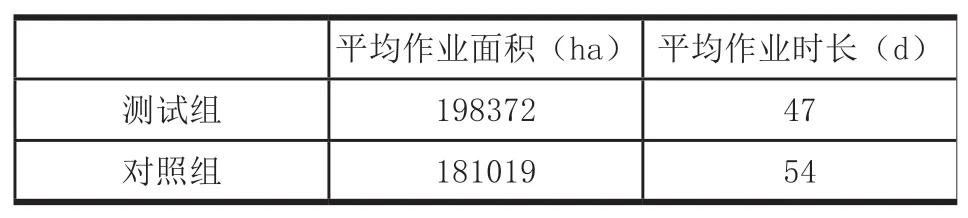
表3 实际施药实验结果
三、结论
航空施药作为农业机械智能化的产物,涉及到计算机、自动化、控制工程、电子通信以及地理信息系统等多个学科,是当前农业智能装备领域的研究热点。对捷联惯性导航系统(SINS)中基于四元数的导航姿态解算方法进行了推导,用于处理捷联惯性导航系统中获取的原始数据,从而得到姿态信息。单一的捷联惯性导航系统虽然可以独立工作,并且在较短时间内能提供有效导航信息,但随着使用时间增加会产生累计误差,降低导航精度;GNSS 定位导航系统虽然能够提供没有误差累积的导航,但却容易受到天气和地形影响,导致无法定位。本研究采用自适应Kalman 滤波组合导航算法融合两种传感器数据,实现了卫星/惯性组合导航系统,通过Matlab 环境进行算法仿真,将30m 的设定误差控制在每个方向7m 以内,误差降低率为77%,验证了算法的可靠性和可行性。在实际装机实验中,安装了导航系统的飞机较对照组飞机每日作业面积增加20.6%,效率提升非常明显,由于可以严格按规划航线作业,施药均匀性也明显提升。Θ