燃气轮机燃料控制原理
2022-06-24徐文涛
徐文涛
(南京汽轮电机(集团)有限责任公司,南京 210037)
近年来,在国家大力提倡分布式能源的主流环境下,电力行业在寻求高效、快速、稳定的发电模式中,迅速地将眼光聚焦到燃气轮机和汽轮机的联合循环上。燃气轮机具有结构简单、紧凑、功率小、低噪声、起停快、运行过程清洁无排放污染的特性,在保证良好的效率和热电比的同时,还能满足周围企业的供热需求,这些优点令此种联合循环的发电模式迅速地成为了各个经济开发区和调峰电厂的新宠。在燃气轮机中,最重要的一环就是高效、稳定、可靠地控制燃料的进气量。我司在引进某型燃气轮机生产制造过程中,使用GE公司的天然气控制阀,速比阀和控制阀互相配合,由MOOG阀精确控制液压油的压力流量,从而实现天然气的闭环控制。下文将分别从天然气控制系统的控制原理、组成、计算等进行分析描述。
1 燃气轮机燃料控制的工作原理
燃气轮机具有良好的效率和热电比(以某型燃气轮机为例,见图1),对气体燃料的精确控制是实现良好的效率和热电比的必要条件。气体燃料的精确控制是通过VGC(控制阀)和VSR(速比阀)的相互配合,调整进入燃烧室的天然气量,从而满足机组正常运行时的转速和负荷要求。
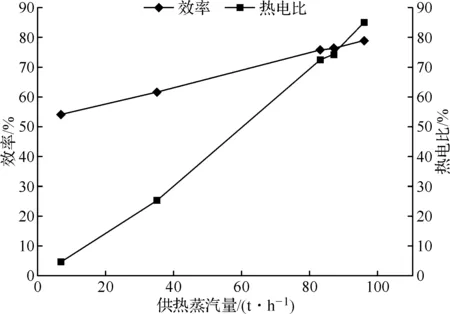
图1 基本负荷时某型燃气轮机联合循环效率、热电比(抽凝机)
VSR的作用是调节进入控制阀前的天然气压力,使流量转化为只与通流面积相关的函数。
对于天然气,流量、流速、截面积、压力之间的关系见式(1):
式中:Q1为流量,m3/s ;μ为流量系数,与阀门或管子的形状有关,取0.6~0.65;A为面积,m2;P为通过阀门前后的压力差, Pa;ρ为流体的密度,kg/m3。
由此可以看出,当一种介质通一个阀门时,如果阀门前后压力差恒定,则流量只与通流面积成正比。
另外,在燃气轮机正常运行或突发事故需要停机的时候,控制阀也能够迅速地截断燃料,从而实现燃气轮机的安全停机。以GE公司的燃气轮机为例,压力P2(P2为VSR和VGC之间的天然气压力)由三个压力变送器(96FG-2A、96FG-2B、96FG-2C)测量。VGC根据一个控制系统命令“燃料行程基准(fuel stroke reference,FSR)”控制所需的燃料流量。将VGC上游的压力维持在一个预定值,可预测燃料流量对VGC命令的响应。根据转速百分比(TNH)及P2来调节VSR,可控制VGC的上游压力P2。将P2信号(FPG2)与卡件信号进行比较,并进行调整。VGC根据燃气轮机转速和电网负荷的要求,不断地调整控制阀的开度,进而调节进入燃烧室的天然气量[1]。对于一台联合循环的某型燃气轮机的纯凝机组,标准工况下各负荷对应的天然气耗量、总热效率见图2。
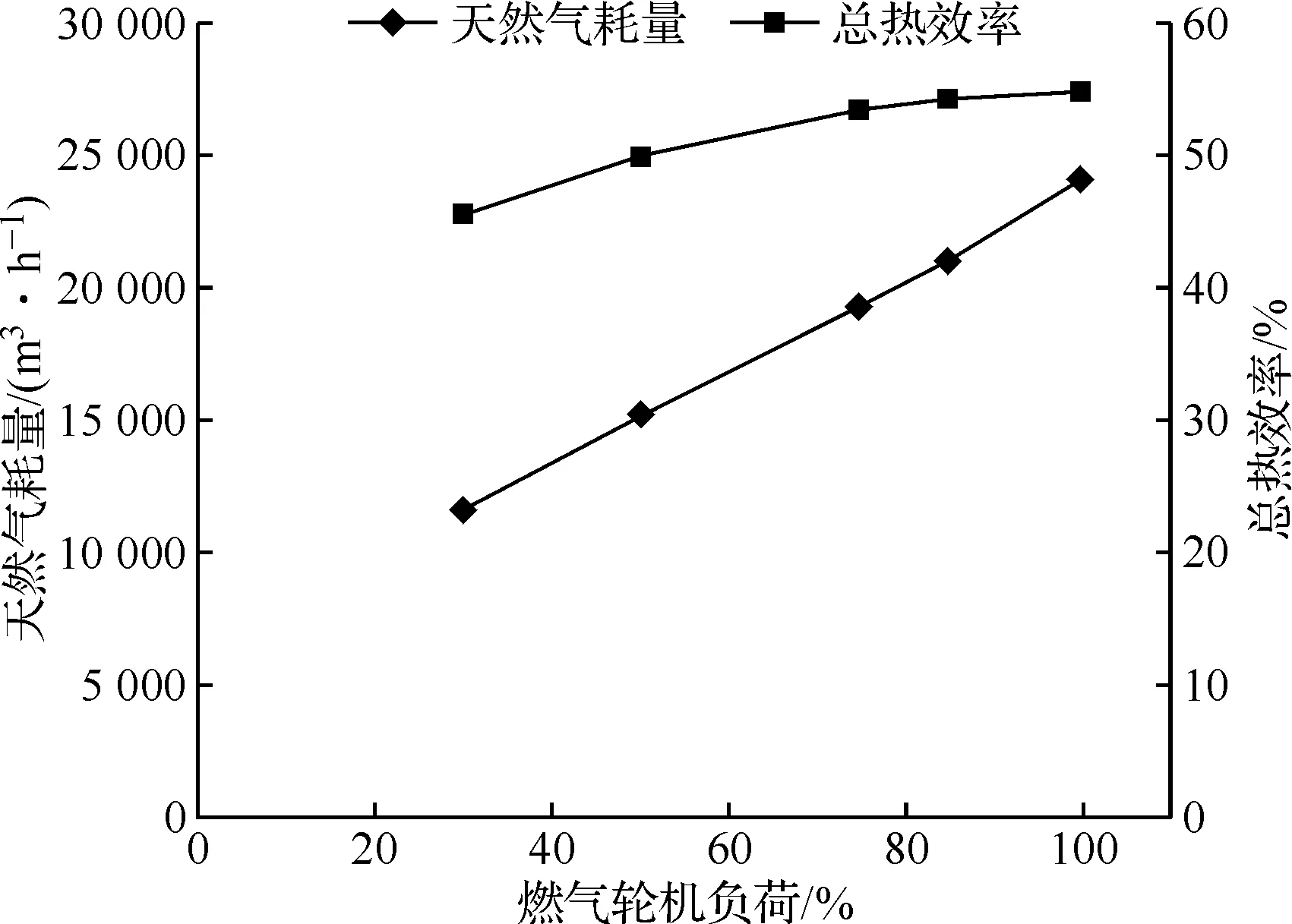
图2 标准工况下各负荷对应的天然气耗量、总热效率
由图2可以看出,随着燃气轮机负荷需求的增加,所需要的天然气量持续增加,其总热效率也是在提高,即对于某型燃气轮机机组,在基本负荷下,其控制阀和速比阀全开,燃气轮机性能最佳。
2 燃料控制的驱动方式及优点
目前,市场主流的燃气轮机天然气控制阀的控制方式为液压油控制。阀芯的移动由液压缸驱动,控制系统的电气信号驱动的3个线圈伺服阀来调节执行机构油缸中的液压油。
液压油来自润滑油油箱,从滑油母管取油(油压为0.18 MPa),经过辅助液压油泵增压至9.3 MPa,经过双联过滤器的过滤清洁,向其服务对象包括天然气控制阀,提供工作所需液压油。
液压技术作为一门成熟的应用学科,虽然历史很长,但依旧充满生机,发展速度非常惊人。液压驱动扭矩大,单位功率重量轻,结构紧凑,反应速度快、准、稳,又能在大范围内实现无级变速,易实现功率放大,并进行过载保护,又能实现自动润滑。除此之外,它还有寿命长、制造成本低的优点,不但在传统领域应用很广,在新兴的机器人和工业控制领域也渐成主力军[2]。虽然现阶段几个主流燃气轮机制造公司比如GE、西门子、三菱等正在尝试使用纯电动控制天然气流量,但在成本、可靠性、响应时间等方面依旧无法达到液压油控制的程度。
3 阀门流量特性
天然气燃料控制阀(见图3)是一种控制气体流量的高反馈性阀门,主要用于工业燃气轮机燃烧系统的天然气流量控制。其独特的设计可在非常低的压力比(P1/P2,P1为VSR前压力)下产生不受排出压力影响的流量特性。此设计具有几乎全行程的线性流量特性,即使在0%到10%的行程,以及10%到100%行程,依旧能保证线性流量特性(见表1)。

图3 气体燃料控制阀
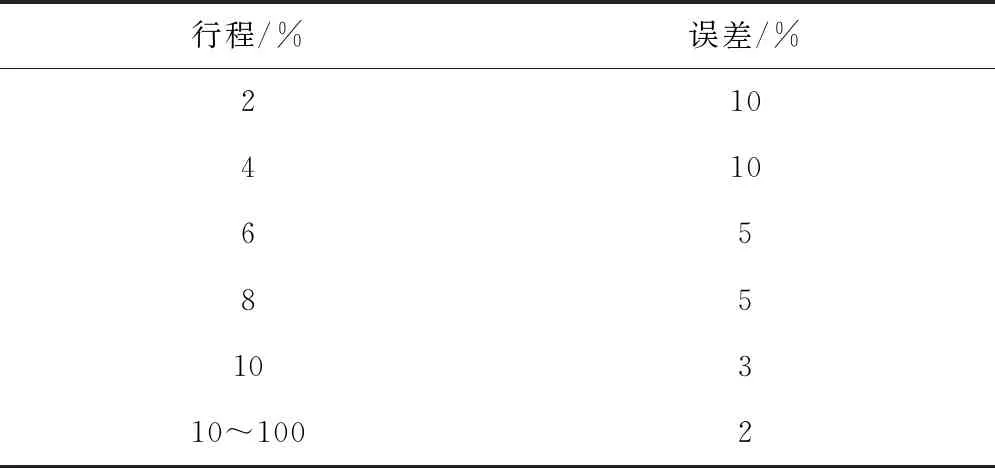
表1 各行程对应的线性误差
4 电液伺服阀
燃气轮机中天然气控制阀为MOOG阀,是一种动态响应快、控制精度高、使用寿命长的电液伺服阀。这种电液伺服阀的液压执行器是通过两级液压伺服阀来调节执行器的输出轴位置,从而控制气体燃料阀。第一级扭矩马达使用三绕组线圈,其控制第一级阀和第二级阀的位置与施加到三个线圈的总电流成比例(见图4)。其中Q是指驱动油的流量大小变化,i是指驱动线圈电流大小。

图4 伺服阀
如果燃气轮机的控制系统需要阀门的快速移动以达到向燃气轮机输送更多燃料的目的,则总电流增加。在这种情况下,控制端口连接到液压油入口,传递到执行器的活塞腔的流速与施加到三个线圈的总电流成比例。因此,打开速度也与提供给扭矩电动机的电流(高于零)成正比。
假如燃气轮机的控制系统需要快速移动来关闭气体燃料控制阀,则会提供一个反向电流。在这种情况下,端口连接到液压排放回路。从活塞腔到排出口的流速与总电流的大小成比例。因此,闭合速度也与提供给力矩电动机的电流成比例。
在零电流附近,伺服阀将控制端口与液压油进油和排油隔离,使活塞压力与弹簧平衡以保持恒定位置。控制系统调节输送到线圈的电流量,调节提供给线圈的电流以获得阀门的适当开度位置[3]。
5 跳闸电磁阀
跳闸电磁阀(20FG-1)使用二位四通电磁阀(见图5)。该电磁阀是在机组正常停机或事故停机时负责控制阀的遮断,使控制阀和截止阀迅速关闭,从而达到切断燃料供应的目的。在起机点火及正常运行时,建立跳闸油压力,打开燃料控制阀,保证燃料的供给。
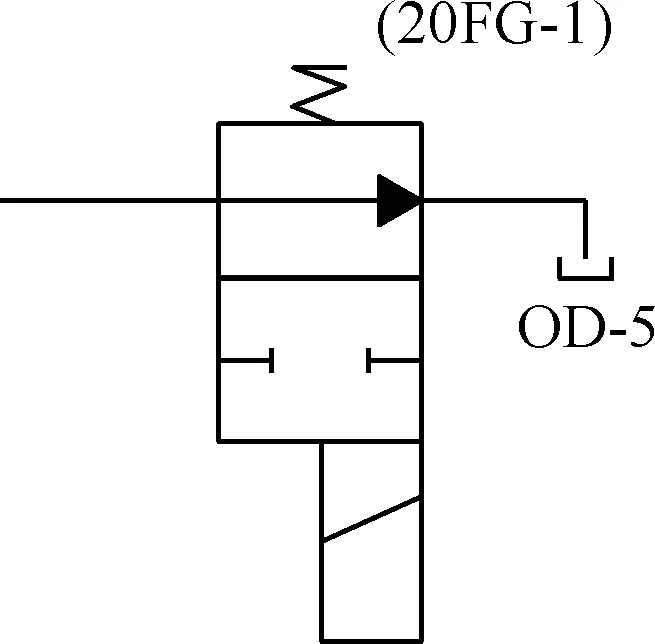
图5 跳闸电磁阀
燃气轮机控制装置为电磁阀提供一个单独熔断的125 V直流馈线,电磁阀在运行模式下通电,在跳闸模式下断电。诊断系统在接线板上的电源分配模块入口点监控每个125 V直流馈线,以保证保险丝完整性和电缆连接。
每个紧急跳闸继电器(ETR1、ETR2、ETR3)的两个串联触点连接到每个电磁阀的正极125 V直流馈线,每个主跳闸继电器(卡件中的紧急跳闸继电器PTR1、PTR2、PTR3)的两个串联触点连接到每个电磁阀的负极125 V直流馈线。每个电磁阀配套一个节电继电器(KE1、KE2、KE3),常闭触点与限流电阻器并联。这些继电器用于在电磁阀通电后降低电流负载。ETR和KE继电器线圈由每个R、S和T段中的I/O组件供电,该组件提供独立的28 V直流电源。
28 V直流母线为限流母线,用于向外部手动紧急跳闸触点供电,显示为紧急停机。如果发生手动紧急跳闸,三个主跳闸继电器(KX4、KY4、KZ4)将28 V直流母线从ETR和KE继电器线圈上断开。任何源自保护模块(如EOS)或操作模块(如手动跳闸)的跳闸将导致三个保护模块段中的每一段通过IO模块向控制模块发送跳闸命令,并可用于识别跳闸源。
6 LVDT位置反馈传感器
安装在每个阀门上的线性变量差动变压器(LVDT)三冗余传感器(可选双冗余或单冗余)为控制系统提供闭环位置控制所需的阀门位置反馈信号。控制阀使用双线圈双杆LVDT进行位置反馈,两个 LVDT 的反馈信号经过伺服放大器,在伺服放大器中两个独立的变压器和一个解调器将 LVDT 输出信号解调为可用于位置控制的直流反馈信号。最大的信号由二极管解调,并由一个放大器变换为与阀门的正确行程校准值相一致。直流信号经过反馈,并在伺服驱动器电路中的一个误差放大器的求和点处与 FSR 进行比较(见图6)。为便于稳定的控制,放大后的误差在经过恰当的均衡后,再通过积分放大器驱动伺服阀 65GC。当 LVDT 反馈信号等于 FSR 输入信号时,伺服驱动器放大器求和点的目标便达到了。

图6 燃气控制阀方框图
7 动态参数调整
控制系统零电流必须与燃气轮机中每个阀门的测量电流相匹配。不正确的零电流设置(仅限比例控制)将影响阀门的正确开度。因此必须将控制阀正确的动态特性输入燃气轮机的控制系统,从而确保燃气轮机的安全有序运行。
一旦控制系统连接到阀门并建立阀门控制,将阀门指令位置设置为全行程的10%,测量每个LVDT的反馈电压,调整反馈环路中的增益,直到反馈电压与该位置的记录值相匹配。LVDT位置和FSR对应如图7所示。 再次将阀门指令位置调整为全行程的90%, 调整反馈环路的增益,直到LVDT反馈电压与记录的值匹配为止。最后确认阀门是否在视觉上关闭,并且LVDT的反馈电压为0.7 V。 有时必须重复此过程以确保10%和90%命令位置处的反馈电压与记录的值匹配。

图7 燃气控制阀位置回路校准趋势图
8 控制阀故障排除事例
以某电厂某型燃气轮机机组调试过程中出现的问题为例,在保证润滑油、液压油、控制线路通路没问题的情况下,在控制系统给出开启命令时,控制阀没有任何动作,反馈与实际情况一致。如果一直存在一个“Stale Speed _ trip”信号,即硬件上有跳机信号。燃气轮机控制盘处于保护状态,电磁阀无法正常带电。此IO保护模块提供基于实时速度信号,并附加主控制最终检查的功能,保护工作如下:如果块脉冲信号被确定为零速度,则保护关闭。如果块脉冲信号高于零速度,程序包从主控件查看转速的值,若最近的转速值与上一个数据帧的转速值完全匹配,则计数器递增,一旦计数器达到阈值,则宣布并锁定陈旧速度跳闸;若速度不同,计数器将被清除。
该保护基于实时速度信号总是抖动或移动少量的情况。如果控制系统从控制器读取的速度值没有变化(抖动),控制器的速度信号完整性缺失。如果跳闸被解除,允许主控制装置恢复,主控制装置恢复60 s后备用保护装置重新启动。该保护在两个以太网端口连接时提供对两个主控件的监控。为两个控件配置时,有一个控制装置满足试验要求就足以防止跳闸。
最终处理方式就是通过一个转速信号发生器,给控制程序提供一个转速信号,控制系统接受之后,认为具备了控制阀动作的条件,最终允许电磁阀带电,液压油进入MOOG阀,从而使控制阀执行正常的动作,并通过LVDT反馈回控制系统。
9 结语
在燃气轮机运行过程中,控制系统给出FSR信号,经过程序计算,给出伺服马达的控制电流,从而控制伺服马达,以达到控制阀门开度的目的,然后通过LVDT 的反馈,验证阀门是否开或者关到预定位置。控制阀的控制特性决定了它的控制曲线越接近线性,控制越准确,所以在燃气轮机的调试过程中,要调整其各个参数,以达到精确控制的目的,最终满足燃气轮机相对应的负荷要求。
