基于RBF神经网络自适应滑模控制技术的某舰炮装填机构控制研究
2022-06-24吴梓萌荀盼盼苏晗
吴梓萌,荀盼盼,苏晗
(西北机电工程研究所,陕西 咸阳 712099)
某舰炮装填机构是舰炮武器的重要组成部分,由永磁同步电机(PMSM)、滚珠丝杠、同步传动齿轮箱等部分组成,其主要功能是迅速而准确地将弹药送入指定位置以便于接下来的弹药发射。永磁同步电机具有运行可靠、结构简单、功率因数高、输出转矩大、损耗小等优点,已被广泛应用于各工业、航空航天及军工领域[1]。考虑到海上由波浪引起的六个自由度方向干扰等环境原因,某舰炮伺服系统在运动过程中的运动状态,以及其快速定位和准确定位能力对后续装填工作的进行有着很大的影响[2]。但是由于干扰对机构各部分的影响,该机构的精确数学模型难以建立,因此传统的控制方法对于这种控制对象而言很难得到理想的控制效果。
在工作时,随着弹药种类、润滑条件及海况环境的变化,其内部各部分的参数,例如负载力矩、阻尼系数、转动惯量等也会发生变化。滑模变结构控制是一类针对非线性不确定系统的控制方法。由于滑模面可以按需要设计且与系统参数变化及系统外干扰无关的特性,近年来滑模变结构控制在工程系统中得到了应用。但是滑模变结构控制需要不断地切换控制量来改变系统结构,控制量在多种模式间切换会导致抖振问题的产生[3]。
从上世纪90年代开始,有学者尝试将神经网络与滑模控制结合来控制机器装置以解决非线性控制问题[4]。文献[5]为解决卧式链传动药仓机构参数摄动问题以及链传动的多边形效应对运动定位的影响,设计了一种RBF神经网络自适应鲁棒滑模控制器,采用RBF神经网络对重要的位置非线性参数进行估计,最终通过仿真证明所设计的控制律在保证药仓模型运动精度的前提下,提高了系统的稳定性并削弱了系统抖振。文献[6]针对某种带有不确定性的四旋翼飞行器系统,提出一种滑模控制和RBF神经网络自适应相结合的混合控制方法,仿真结果证明相对于RBF神经网络的自适应PID控制,该方法具有更短的调节时间、更小的超调量和更好的抗干扰能力。文献[7]针对宇航器太阳帆板控制问题,提出了一种基于RBF神经网络自适应滑模控制方案,结果表明设计的方法较好地解决了复杂空间背景下不确定性和外部干扰对帆板控制带来的影响问题。文献[8]针对舰载武器随动系统精度问题,提出了一种基于RBF神经网络滑模控制策略,使用RBF神经网络对系统某扰动参数进行自适应估计,仿真结果表明所设计的控制器能提高舰载武器随动系统的快速响应能力和动态精度,满足系统要求。
笔者针对某舰炮装填机构的高精度轨迹跟踪问题,设计了一种RBF神经网络自适应滑模控制律。期望利用RBF神经网络的学习和自适应能力预测海浪环境扰动量,提高控制精度。仿真结果表示该控制器相较于传统的PID控制器和普通滑模控制器拥有更优良的控制性能,提高了系统的鲁棒性。
1 系统动力学模型
为便于分析,基于PMSM数学模型结合机械组成,建立的某舰炮装填机构系统模型结构如图1所示。
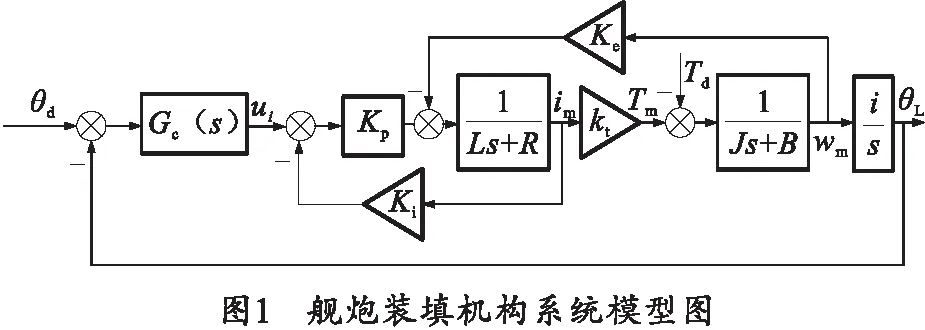
该系统使用永磁同步电机(PMSM)驱动,因为机械时间常数远大于电气时间常数,这里忽略电流环动态,有
(1)
式中:L是电枢总电感;R是电枢回路等效后的电阻;s是Laplace算子。
电机输出转矩定义为
(2)
式中:Kt=PnΨf,为电机电磁转矩系数(N·m/A),Pn为电机的极对数,Ψf为转子磁链,Kt>0;Kp是放大器环节增益;Ke是电机反电动势系数;Ki是电机驱动电流反馈系数;ui是控制输入。
因此某舰炮装填机构系统动力学方程定义为
(3)

联立式(2)、(3),可以得到最终的系统动力学方程为
(4)
通过对输入电流ui进行控制,完成实际负载端角位移θL对预设轨迹规划后的负载端角位置θd的跟踪。控制要求有:在给定误差内及时跟踪给定的角位置轨迹,运动中有良好的稳定性和动态性能,将抖振尽可能控制在较小的范围内。要求相较于普通滑模控制器抖振减小,控制精度上要求负载端的动态跟踪误差不大于±0.1 rad,稳态角度误差不大于±0.02 rad。
2 控制器设计
首先定义该舰炮装填机构系统的输出位移误差为
e=θd-θL.
(5)
定义滑模面函数s为
(6)
且规定:k1>0,即参数选择保证多项式k1+1满足Hurwitz条件。
联立式(4)、(5)和(6),得
(7)

综上,系统滑模控制律设计为

(8)
将式(8)代入式(7),设计快速幂次趋近律为
(9)
式中:k2为幂次趋近项系数,k2>0,它的存在可以使系统状态在s较大时快速趋近于滑模面;k3表示切换速率,k3>0;β为设计常数,要求0<β<1,该项过小趋近速度慢,过大则可能会加重抖振问题。sgn(s)为符号函数,形式为
(10)
为了尽可能消除抖振的影响,使切换连续,这里采取一种新型饱和函数来替代符号函数sgn(s),新型饱和函数sat(s)为
(11)
式中,Δ为大于0的常数。
(12)
式中,d为由海浪干扰和机构中存在的时变参数导致的不确定外加扰动,采取特定固定值描述该干扰不够准确。笔者采用自适应法对该干扰d进行处理,使用RBF神经网络预测真实干扰d,以求减少海浪干扰等因素对系统的影响。
RBF神经网络是一种具有单隐层的两层前向网络,已被证明在预测能力、分类能力和学习速度上优于传统BP神经网络[9]。其结构如图2所示。

(13)

则RBF网络输出为
(14)

控制输出变为

(15)

定义Lyapunov函数:
(16)
要求r大于0。
对式(15)求导,得
(17)
所以选取自适应律为
(18)
联立式(17)和(18)有:
(19)

定义一个非负函数M:
(20)
结合前面的分析可知V是一个不增函数,且V(0)有界,所以V也是一个有界函数。因此,

所以当时间趋于无穷大时,该系统角位移误差值趋于0,系统是稳定的。
3 仿真验证分析
将设计的RBF-ASMC控制器应用于某舰炮装填机构的位置控制,控制框图如图3所示。

以MATLAB/Simulink软件为平台建立仿真模型,使用ode4求解器进行仿真,仿真周期设定为1 ms。为了验证所设计算法的控制性能,对设计的RBF-ASMC控制器、PID控制器和普通滑模SMC控制器控制效果进行对比。仿真中采用与预设规划轨迹进行误差对比,可以直观观察控制效果。其中规划轨迹如图4所示。

仿真参数选取:R=0.1 Ω,Kt=1.7 N·m/A,Ke=32.2 V/(kr/s),β=0.95,Δ=0.01,J=0.109 kg·m2,Kp=20.3 A/V,Ki=1 A/V,k1=500,k2=400,k3=400,r=0.000 5。
RBF网络结构取2-5-1型,理想网络权值W*的初始值设为[0 0 0 0 0]T,bi=5.0,cj选择2×5矩阵,
在使用中,实际参数普遍存在时变现象。这里设系统等效阻尼系数存在不确定性,取Be0=B(1+sin(0.25πt))。作为参照对比用的PID控制输出ui1为
(21)
参数选取:kp=20 000,ki=15,kd=10。
作为参照对比用的普通滑模SMC控制器输出ui2为
(22)
式中:k4=500;k5=400;k6=400;d取舰船在特定海况下的海浪等效干扰,d=15sin(2πt)(N·m)。
结合特定海浪干扰和时变参数,在零初始条件下,分别对PID控制器、SMC控制器和设计的RBF-ASMC控制器进行仿真,得到的角度误差、角速度误差、控制输入信号情况如图5、6所示。


仿真结果显示在给定参数和干扰情况下,相较于PID控制器和SMC控制器,采用设计的RBF-ASMC控制器具有更加优良的稳态和动态控制效果。图5显示,RBF-ASMC控制器的角位移跟踪性能远高于PID控制器,优于SMC控制器。其动态角位移跟踪误差最大为-4.6 mrad;PID控制器的动态角位移跟踪误差最大为-5.06 mrad;SMC控制器的动态角位移跟踪误差最大为-5.3 mrad;而且从图中可以看出RBF-ASMC控制器和SMC控制器的角位移跟踪速度明显快于PID控制器,且角位移误差曲线趋势较PID控制器而言在给定的环境干扰下没有明显的波动变化。还可以看出RBF-ASMC控制器相对于SMC控制器而言,在跟踪时没有明显的抖振,误差趋近于0且稳定的时间明显快于后者。
从图6可以看出,在满足角位移指标的情况下,设计的RBF-ASMC控制器的角速度跟踪精度强于PID控制器和普通滑模控制器,其最大跟踪误差为2.04 rad·s-1,而PID控制器最大跟踪误差为-3.48 rad·s-1,SMC控制器的最大跟踪误差为2.08 rad·s-1;而且RBF-ASMC控制器的角速度跟踪速度明显快于PID控制器。SMC控制器虽然最大跟踪误差与RBF-ASMC控制器基本一致且角速度跟踪误差最后也能稳定在0,但是在跟踪过程中其动态误差明显大于RBF-ASMC控制器。


4 结论
笔者根据某舰炮装填机构结构、运动特点,对比该对象的控制现状,设计了一种基于RBF神经网络自适应滑模方案的舰炮装填机构系统控制方案,分析了该方法解决在特定海况下强海浪干扰和时变参数等因素对系统控制精度的影响,进行了某舰炮装填机构系统精确位置定位控制仿真,得到以下结论:
1)设计的基于RBF神经网络的自适应滑模控制器对系统干扰、参数变化是不敏感的,具有良好的位置跟踪精度,能够很好地跟踪给定的运动轨迹。
2)系统动态误差和稳定误差均收敛在较小的范围,满足性能指标,为后续的弹药发射过程提供了保障。
3)新控制方案下的系统相较于PID控制方案和普通滑模控制器具有更加优秀的稳态性能,同时,其控制输出电流与PID控制器的输出电流曲线相比动态响应速度更快。
4)仿真分析表明滑模控制方法性能全面优于PID控制和普通滑模控制方法,可以为某舰炮的其他部分机构控制提供参考借鉴。
