国内林果采摘设备研究现状分析
2022-06-22周建波汤晶宇
寇 欣, 王 东, 周建波*, 汤晶宇
(1.国家林业和草原局哈尔滨林业机械研究所,黑龙江 哈尔滨 150086;2.国家林业和草原局林业机电工程实验室,黑龙江 哈尔滨 150086;3.国家林业和草原局林业装备工程技术研究中心,黑龙江 哈尔滨 150086)
林果采摘是林果生产全过程中对劳动力、时效性需求最强的环节,成熟的果实若不能完成即时采收,会严重影响果实质量.造成经济损失。随着林果种植规模不断扩大,农村劳动力衰减,林果种植的投入成本增大,需要对现有的采收设备进行优化和升级,扩大机械采收设备的使用规模,以提高采收效率,降低采收成本。
国外林果机械化采收设备研究起步较早,整体技术水平比较成熟,部分大型果园已经实现机械化采收作业。欧美等发达国家在发展过程中林机与林艺配合较好,地形整备、果树间距均参考机械设备的工作规范,在很大程度上支撑了机械化产业的发展,而国内目前在林果标准化种植规范上并没有与机械化采收的技术发展相结合,大部分果园的种植条件并不符合机械设备的工作要求,也限制住了机械化设备的发展与普及。因此,应针对不同林果种类建立标准化种植规范,为机械化采收技术的发展搭建基础平台。
目前国内对于林果采摘设备的研究主要集中在以下几个分类:振动式、拍打式、气吸式、齿梳式和采摘机器人,本研究对具有代表性的各类采摘设备进行分析,为其发展提供一定的参考支持。
1 振动式
振动式采摘设备通过振动发生装置摇振枝干或主枝,使果实被迫运动,当受到的激振力大于果柄与枝干连接力时果实脱落,这是目前应用最为广泛的一种林果机械采摘形式。振动式采摘设备成本低、效率高、设备构造简单,操作维修养护方便。振动产生形式主要有两种,偏心式与曲柄连杆式[1](如图1)。有部分果实果柄与枝干的连接牢固,在振动采收前会提前喷洒脱果剂,将果实催熟,增加振动采摘效率。

图1 两种振动发生形式
振动式采摘设备经过多年的发展,在工作过程中已经不止是简单的采用加大振幅、频率的方式粗暴地将果实摇振掉落,而是充分考虑到末端执行器在夹持枝干或主枝时对树木造成的损伤,在研制过程中针对采摘的果实,参考果实特征因素、树木特征参数、果实掉落状况以及对枝干的损伤等因素,分析出最佳的振动频率、振幅和激振方式。
东北林业大学的李志鹏[2]等研制了一种振动式蓝莓采摘机(如图 2),通过建立蓝莓侧枝受力模型,分析蓝莓侧枝的轴向纵向振动,以此建立数学模型(如图3),推导出侧枝的振动响应以及果实的受迫力,验证出振动形成的径向力是蓝莓果实脱落的主要作用力,设计蓝莓采摘机。其工作效率达到人工采摘的10.6倍且破损率较低。

图2 蓝莓采摘机

图3 蓝莓采摘机激振器1.激振器;2.曲柄;3.连杆;4.摇杆
浙江理工大学的杜小强[3]等提出了一种振幅可连续调节的单向拽振式林果采收机构(如图4),通过调节曲柄摇杆滑块机构改变直线往复振动激励进而改变振幅。用ADAMS软件对摇振机构进行运动学分析,结果表明增大摇振曲柄长度能增大变幅摇振机构的行程,同时二者成递增关系。采用遗传算法对变幅摇杆机构尺寸进行优化后,制作样机进行田间采收试验,得到的平均采收率为63.9%。

图4 单向拽振式林果振动采摘装置
南京林业大学的王长勤[4]等设计了一种偏心式林果振动采收机,其夹持机构(如图 5)通过建立偏心式振动采收动力学模型,得出采收机-果树系统稳态响应振幅表达式,分析出激振频率对树干全振幅和果实采净率有显著性影响,并成正相关。对12棵成熟期核桃树进行采摘试验,通过振幅测量系统进行数据采集,综合参考采净率和落果、树干夹持处的破坏性损伤,将激振频率控制在19~20 Hz,平均采净率达到89.5%~92.6%。

图5 夹持机构1.夹持主臂;2.连杆;3.气缸;4.夹持动臂;5.夹板;6.夹板轴向固定;7.橡胶垫;8.电机托板;9.振动电机;10.夹持直径调节机构
2 拍打式
拍打式采摘与振动式采摘原理相似,二者差别主要为拍打式力作用于果实及树枝,振动式力作用于枝干或主枝。拍打式采摘果实掉落形式有两种[5]:一是当拍打部件击中果实时,拍打力大于果柄连接力时果实掉落;二是当拍打部件击中树枝时,果实被迫运动,当受到的激振力大于果柄连接力时果实脱落。故拍打式多应用于耐磕碰的果实,如大枣,板栗等。
华中农业大学的宗望远等设计一种板栗拍打式收获机,将落果装置探入板栗树冠内(如图6),由拍打装置(如图7)对板栗果实及树枝进行不断击打。影响采摘效果以及造成树木损伤的主要因素有拍打条材质、拍打机构尺寸参数及运动规律。确定参数后田间试验结果表明该装置平均落果率为90.5%,且对板栗树枝损伤较小。

图6 板栗拍打式工作机工作场景
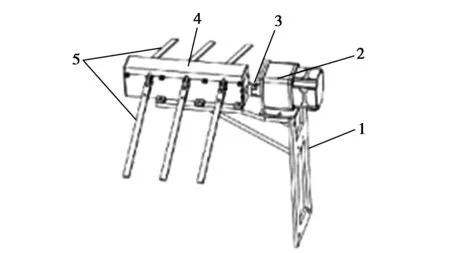
图7 拍打装置1.直角架;2.电机;3.联轴器;4.拍打箱体结构;5.拍打条
农业农村部南京农业机械化研究所的梅松[6]等设计了一种振动拍打复合式红枣采收机(如图8)。底部设置有伞形接果装置,通过悬臂将拍振部件插入果树冠层待拍振位置,启动将果实振落。在确定拍打行程及最大转动振动角后,设计拍振和伞形接果关键部件。通过田间试验,红枣归集率92%左右,采净率达到90%以上,红枣损伤率控制在5.4%以内。

图8 拍振复合式红枣采收机
3 气吸式
气吸式采收设备主要是采用真空泵生成负压,通过气管输送至果实处,当吸力大于果柄与枝干间的连接力时,果实掉落,进而实现收获。大部分吸式采收设备通过气管能够直接对采摘下的果实进行收集,不用单独设置收集装置。
气吸式采收是一种非接触式采摘方法,可以避免果实与机械接触造成损伤,保护果实完好。目前针对气吸式采收设备的研制主要集中在小浆果、花椒、枸杞、红枣等质量较轻、较易破损的果实。针对气吸式采收装备的研究主要集中在如何优化吸气管道的内部结构,使其内部气压分布更加有利于吸取果实。
中国农业大学的王荣炎[7]等对气吸式枸杞采摘试验装置(如图9)进行了研究,使用FLUENT软件对气吸管道仿真,得到气体压力云图及速度云图,并与实际工作数据进行比对,确定了采摘枸杞的最佳工作参数:气吸管径25 mm,风速27.5 m/s,气吸角度为90°时成熟枸杞脱落所需时间平均为1.92 s,破果率为6.67%。试验过程中发现成熟枸杞与未成熟枸杞的脱落时间相差可达6 s以上。

图9 气吸式枸杞采摘试验装置1.万向轮;2.吸风口;3.气息管道;4.防尘罩;5.抽风机;6.无极调速旋钮;7.散热口;8.电机;9.收集桶
新疆农业大学的张学军[8]等研制了一种用于捡拾落地红枣的气吸式捡拾装备(如图10),其难点在于控制气流速度与红枣的悬浮速度的关系以及红枣与杂质的有效分离,避免堵塞风管。通过对吸管口以及吸气室内部的流畅进行模拟,确定吸管口直径为135 mm,吸气室进出口直径分别为137 mm与180 mm时,气流最稳定,吸气室内的气流速度大于吸管口的流速,降低了捡拾过程中堵塞的可能性,提高了工作效率。经过田间试验验证,当气流速度为42 m/s时,捡拾率平均为93.11%,含杂率平均值为2.92%。

图10 落地红枣捡拾装备田间试验
4 齿梳式
齿梳式采摘是一种通过齿梳状采摘工作头,插入果树枝条中,从而将果实从枝条上梳落的采摘形式。这种收获过程采摘工作头与果树枝条进行柔性接触,能降低对果树以及果实造成的损伤。在设计过程中应主要考虑齿梳工作头的形态与分布,能够与被采摘果树性状相配,降低对树木造成的影响。
昆明理工大学的于英杰[9]等设计了一种手持振动梳刷式小粒咖啡采摘装置(如图11),采用振动与梳刷两种方式共同作用,提高采收率。其中梳刷部件的设计由小粒咖啡树的树形参数所决定。根据果树的枝条长度、果实的大小分布,确定梳齿直径、长度、分布形态。若间距过小容易损伤果实及枝干,间距过大容易漏采,降低收获率。通过二次回归正交旋转组合试验,可知影响采净率的因素依次为频率、梳齿间距、偏心块夹角,影响损伤率的因素依次为梳齿间距、频率、偏心块夹角。设定偏心块夹角为22.5°,频率为26 Hz、梳齿间距为32 mm时,采净率为91.35%,损伤率为4.15%。

图11 手持振动梳刷式小粒咖啡收获装置1.电机;2.联轴器;3.外壳;4.阻力调节器;5.梳齿;6.梳齿卡扣;7.指排光轴;8.凸轮轴9.传动轴;10、20、21、22.链轮;11.链轮卡座;12.链条;13、26.调节板;14.固定壳体;15.偏心块;16、23.菱形带座轴承;17.轴套;18、24.限位套;19、25.带槽轴承
甘肃农业大学万芳新[10]等研制的梳齿-气吸式花椒采摘机(其采摘头如图12),通过梳齿将花椒果实与枝干分离,并通过风机产生的负压收集花椒。花椒果实在花椒枝条顶部成串生长,因此采摘头采用疏齿式(如图13),采摘头由固定在旋转轴上的刀片组成,刀片垂直于轴圆周面。参考花椒粒直径,花椒串尺寸、花椒果梗直径,设定刀片齿形,并对齿形尖角进行倒圆角设计,避免硬性碰撞破损。在进行采摘作业时,采摘头向花椒串旋转,使花椒串进入梳齿之间,通过转动采摘头将花椒果的果梗在齿刃处受到剪切、牵拉,与花椒粒分离,从而实现花椒果实的采摘。

图12 采摘头

图13 梳齿刀片
江西农业大学的饶洪辉[11]等设计了一种电动胶辊旋转式油茶果采摘执行器(如图14)。在连续回转和自转过程中不停的将油茶果枝夹紧,油茶果在遭到胶辊的撞击后掉落。这种特殊的胶辊作用形式在采摘理论上与齿梳式采摘较为一致,通过卡住果实将其从生长枝条上拖拽而下。油茶果采摘效果与油茶果直径、胶辊上下组间间隙有关,同时胶辊表面光滑,能有效避免对油茶花苞的损伤,这种特殊的形式设计是根据油茶果特殊的“花果同期”特性,减少梳齿在工作过程中梳拽下花朵,影响第二年的产果量。
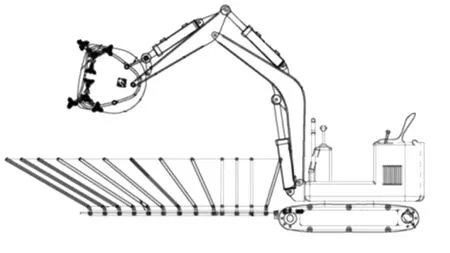
图14 电动胶辊旋转式油茶果采摘机

图15 采摘头
5 采摘机器人
采摘机械手臂、底部移动平台、末端执行器和果实识别装置为机械手式采摘机器人的主要组成部分,灵活的机械手臂通常拥有多个自由度,灵活性高,同时采用摄像机、图像识别技术来识别果实。机械手式采摘机器人工作更加偏向于“精耕细作”,生产制造成本高昂,维护保养更加复杂,其工作效率不如其他形式的采摘装备高,但采摘的质量更加优良,对果实的伤害较小。目前投入实际生产实践中的机械手式采摘机器人较少,大多处在研究阶段。
华南农业大学的陈燕[12]等设了一种夹剪一体的荔枝采摘末端执行器(如图16),通过左右刀片闭合实现剪切果柄动作,下部配备夹持手指,稳定夹持剪切下的荔枝串果母枝。在试验过程中平均工作时间2 s,成功率与母枝直径有关,在母枝直径5 mm及以下时成功率为100%,母枝直径达到6~7 mm时成功率为70%,同时具有中等的抗遮挡干扰采摘能力。

图16 荔枝采摘末端执行器采摘试验
河北工业大学的王晓楠[13]等设计一种筒式末端执行器(如图17),是一套四自由度关节式机械臂,装备激光视觉系统,由CCD相机和激光竖直扫描完成果实的定位,用于采摘吊线栽培番茄,通过负压吸入番茄后旋转扭断果柄实现收获。单个番茄的采摘耗时约为24 s,强光和弱光下的果实采摘成功率为83.9%和79.4%。
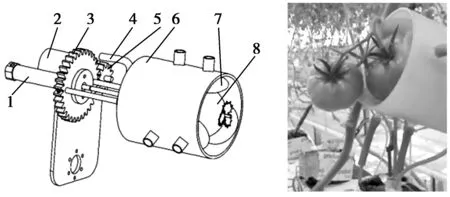
图17 番茄采摘手爪与采摘试验
此外采摘机器人末端执行器形式还有手指式、夹持式等,其动作轨迹更为复杂,零部件设计更为精密。
6 辅助式采摘设备
除成套式机械采摘设备外,在实际工作中有大量人工辅助式采摘设备投入使用。部分果实由于其自身特性,耐磕碰、果柄结合力不大,如枣类、板栗等,在进行人工采收的区域,多采用长杆拍打方式,掉落至地上后捡拾收集。另有部分手持式工具帮助工人定位高处果实,通过拖拽切割、气吸方式切断果柄,完成采收。
西北农林科技大学的张润泽[14]等设计了一种夹持切割式便携采摘辅助设备(如图18)。通过伸缩杆调节采摘高度,当达到目标高度时手动收紧闸线,摘果器顶端弧形刀片完成闭合切断果柄,沿着输送管道落入背负式收集筐内。此装置研发针对于苹果采摘,但其整体结构形式也可适用于与苹果性状相近的其他果实采收。中国农业大学的马少春[15]等设计了一种负压吸力式便携采摘辅助设备(如图19),通过伸缩杆定位目标果实(苹果),利用负压吸引苹果进入壳体,闭合壳体口出弧形刀片组完成切断果柄,果实掉入收集袋中,完成采收。
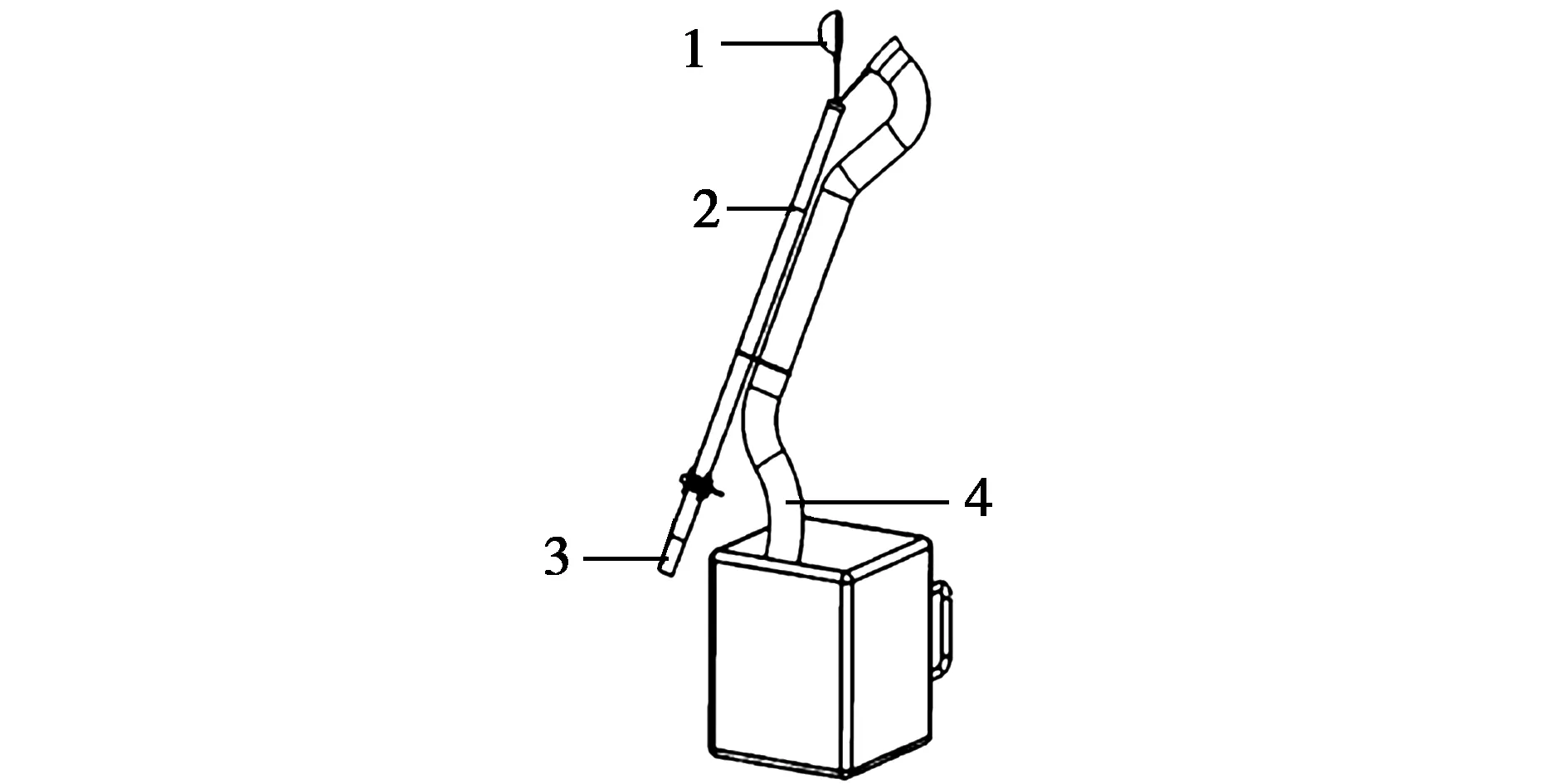
图18 夹持切割式便携采摘辅助设备1.采摘部件;2.伸缩部件;3.驱动部件;4.收集部件

图19 负压吸力式便携苹果采摘装置
辅助式采摘设备可看作成套机械采摘设备的采摘头部分,通过人工来完成工作定位,采摘作业形式基本相似,如振动、拍打、切割、气吸等。其在部分复杂地形及小范围人工采摘区域能得到很好的应用,但并不适用于大规模的标准化果园的采摘工作。
7 总结
本文总结了几种采摘设备的工作原理,但多数处于试验阶段,且“一果一机”,没有成为较为统一、可实现多种林果采摘的装备。因此要让林果收获向更加机械化、自动化方向发展,充分释放劳动力,还需进行以下方面的研究:
(1)规范林果种植模式。针对不同林果种类建立标准化种植规范,为机械化采收技术的发展搭建基础平台。目前真正投入到生产实际中的采摘设备多是结构形式简单的采摘设备,如振动式、气吸式,这些设备自动化程度和对树木的种植条件要求不高,工作中往往需要人员参与操作。自动化程度更高的精密型采摘设备,对于林果种植的整体环境要求更加严格,如种植密度、树冠宽幅、修枝情况、挂果位置等,除了继续大力发展自动化、智能化的控制技术、机器视觉技术外,还应规范林果种植模式为机械化采摘提供便利条件。
(2)一机多用。对于同一种采摘形式的装备进行多种工作模式的技术升级,如振动采摘设备的激振装置可以进行更大范围的振动输出,齿梳式采摘设备的采摘头有多种结构形式,适宜不同种林果并可根据使用需求随时更换。这种一机多用的使用形式只需根据相应的果树形式替换相应的模块即可,能大大提高采收设备的使用成本,提高利用率。
(3)加强采集系统整合研究。林果的采与集在人工采收过程中一次性完成,但是在机械化采收过程中被分割为两个部分,采摘设备工作准备就位后,再单独配备一个倒伞形状或方形的收集装置,需进行两次定位操作,延长了采收作业时间。建议加强采集系统的整合研究,一次定位即可完成采摘头和收集装置的就位。
(4)智能化与轻简化。针对部分林果存在种植面积分散,产量不集中的问题,建议面向个体种植户研制小型家用轻简化采收设备,辐射周边小型种植户,降低生产成本。同时进行设备的智能化升级,让机器完成识别、分析、设置工作参数等采收工作,降低对从业人员的操作要求。
(5)强化采收作业平台研究。研制适应复杂山地地形的多功能作业平台,降低地形条件对经济林果机械化发展的制约,将设备的工作部分与移动部分进行分类研究。采收平台作为各类操作型机械设备的承托底盘,极大影响采收工作设备的发展。
