新型风电机组的差动调速功率控制方法研究
2022-06-22李刚俊黄杨森
苏 睿,李刚俊,黄杨森
(1.成都工业学院 智能制造学院,四川 成都 611730;2.中国东方电气集团有限公司,四川 成都 611731)
0 引言
常见的兆瓦级主流风电机组主要包括双馈机组和永磁直驱机组。兆瓦级机组利用变频器调节风轮转速,从而实现变速恒频运行。但是,此类采用电力电子设备调速的风电机组并网运行时会产生较多问题,如无功功耗大、电流谐波成分高、专用发电机结构复杂[1]。在此背景下,一些学者提出了风电机组传动链采用无级调速的方案,其设计思想为,基于差动轮系的二自由度特性,利用调速电机改变风轮转速,且传动链末端采用同步发电机,发电机定子直联电网,故电网频率锁定转子转速,无需变频器即可向电网输入恒频电能。
Mangialardi L[2]首次提出了采用差动轮系传动、电动机调速的电驱差动风电机组初步方案,并开展了可行性方面的研究。Idan M[3]采用调速电机与多个差动轮系组成的电驱差动风电机组方案,该方案能够实现常规调速需求,但设备数量过多、结构较复杂,未能解决能耗与成本偏高的问题。穆安乐[4]对风电机组传动链各构件的运动学关系进行了研究,建立了伺服电机相关参数的优化模型,深入分析了各轴转速的匹配关系。Freeman J B[5]采用模型参考自适应控制对该类机组的转速调节策略进行了研究。Zhang T[6]针对机组的功率、效率等进行研究,发现通过神经反步控制可实现较优的发电效能。陈垚[7]对此类机组进行了控制策略方面的研究,主要包括基于Bladed的齿轮箱二次开发、永磁电机的变速策略。
以上相关研究多从转速匹配等运动学角度分析新型风电机组的无级变速原理,但尚未针对该类型机组的功率控制方法进行深入探索,不利于该类机组设计理论体系的完善以及后续的实际工程应用。鉴于此,本文提出了新型风电机组的差动调速功率控制方法,并在低于额定风速和高于额定风速两种工况下,对不同的控制过程进行了分析。组建了1.5 MW的该类新型风电机组Simulink模型,并在不同风速下进行仿真,以验证该功率控制方法的有效性。
1 机组运行原理
新型风电机组传动链主要包括风轮、增速箱、差动轮系、调速电机和并网的同步发电机等,系统结构如图1所示。

图1 新型风电机组示意图Fig.1 Schematic diagram of wind turbine
差动轮系基本构件齿圈转速NR、轮架转速NC以及太阳轮转速NS具有下述确定关系。

式中:f为电网频率,50 Hz或60 Hz;p为同步发电机极对数。
综上所述,在差动调速风电机组并网运行时,可通过改变电动机转速以调节风轮转速。
2 差动调速功率控制方法
双馈和直驱风电机组通过变频器改变风能利用率Cp来调节机组功率,而新型风电机组通过传动链的差动调速实现功率控制,降低了大功率变频器对电能质量的负面影响,提升了机组可靠性,降低了整机成本。在额定风速以下时,通过差动调速使风轮尽可能多地获得功率;在额定风速以上时,通过差动调速使风轮获得的功率稳定在机组额定容量。风功率Pwind与风轮吸收功率Protor的关系为

式中:C1=0.73;C2=151;C3=0.58;C4=0.002;C5=2.14;C6=13.2;C7=18.4;C8=-0.02;C9=-0.003。
2.1 低于额定风速的差动调速功率控制
风功率部分转变为风轮机械功率,该功率为机组传动链的输入总功率。当风速V等于额定风速时,同步发电机以额定状态运行;当V低于额定风速时,输入总功率低于同步发电机功率额定值。对于新型风电机组,应通过差动调速以调节传动链各轴匹配转速,从而调节λ实现风轮传递功率最大化。此时β应保持为0°,则Cp与λ的关系曲线如图2所示。
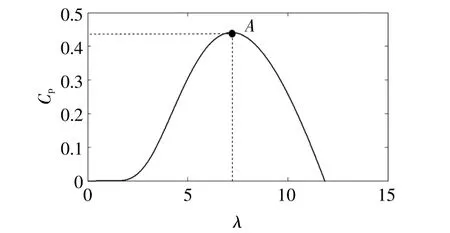
图2 β=0°时,Cp与λ的关系曲线Fig.2 The relationship between Cp andλwhileβ=0 °
为使Cp保持最大值,则机组应运行在图2所示点A的状态,差动调速的最终目标为达到A点所对应的λ。λ与风轮转速Nrotor的关系为

式中:R为风轮转子半径。
新型风电机组传动链参数设置如下:R为30 m;定轴齿箱传动比为80;差动轮系齿圈与太阳轮齿数比u为2;调速电机轴上齿轮齿数与齿圈内齿数相等;同步发电机额定功率为1.5 MW,额定转子转速为1 800 r/min。
确定额定风速:当Cp为A点对应的值0.43时,此时机组功率为发电机额定值,风速则等于额定风速值,按式(3)计算得到额定风速为12.7 m/s。
由图2可知,峰值A点的横坐标λ为7.3。风速V取不同值且均低于额定风速值时,机组应以最大Cp值为控制目标。针对风速分别为9,10,11 m/s时,按式(4)计算得到λ、风轮转速等运行参数,并按式(1)计算得到用于传动链差动调速的调速电机转速值(表1)。
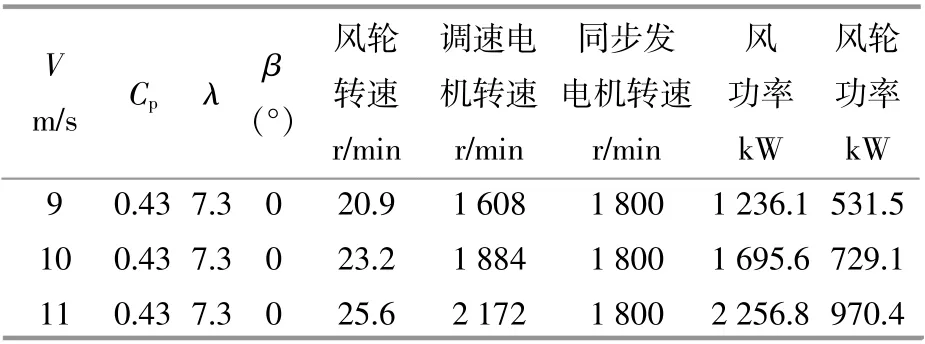
表1 低于额定风速时,不同风速下主要参数理想值Table 1 The ideal value of main parameters under different wind speeds below the rated wind
2.2 高于额定风速的差动调速功率控制
当V高于额定风速时,风轮输入瞬时功率高于同步发电机功率额定值,对于新型风电机组,应通过差动调速以调节传动链各轴匹配转速,从而调节λ以减少输入功率,保持风轮输入功率稳定在机组额定功率值附近。
图3为桨距角分别为β1,β2,β3时的Cp-λ曲线。其中β1=0°,且β1<β2<β3,图中各点坐标分别为A(λA,Cp1),B(λB,Cp2),C(λC,Cp2),D(λD,Cp2)。

图3 桨距角分别为β1,β2,β3时的Cp-λ曲线Fig.3 The curve of Cp-λwhile the pitch angle equals to the β1,β2,β3 respectively
当风速小于额定风速时,变桨机构不动作,β等于0°,风能利用率等于Cp1,机组以图3所示A点对应参数稳定运行;当风速突增,并超过额定风速时,机组瞬时功率亦增加且超过功率额定值,故需将风能利用率降低。分析图3曲线,可采用以下3种措施降低Cp。
措施1:变桨机构不动作,β1始终等于0°,通过差动调速调节传动链各轴转速,风轮始终沿着图3中A点所在曲线运行,并由A点运行至B点,λ亦降低至λB。
措施2:变桨机构开始动作,β增大为β3,同时,通过差动调速调节传动链各轴转速,风轮由图3中的β1对应曲线逐渐运行至β3对应曲线,即由β点运行至B点,λ亦降低至λD。
措施3:变桨机构开始动作,β增至[β1,β3]区间的某值β2。通过差动调速调节传动链各轴转速,风轮由图3中的β1对应曲线逐渐运行至β2对应曲线,即由A点运行至C点,λ由λA减小为λC。
以上措施最终均能降低Cp,措施1中β不动作,在较短时间内,针对大惯量风轮,通过差动调速调节风轮转速,需配备高性能的调速系统。措施2,3中变桨和差动调速同时进行,响应时间较短。措施2是措施3的极致情况,故通过措施2,3,机组最终运行在β大于零的某曲线上。
V取不同值且均高于额定风速时,机组应以降低Cp值为控制目标。针对14,15 m/s和16 m/s等不同风速,按式(4)计算得到λ、风轮转速等运行参数;并按式(1)计算得到用于传动链差动调速的调速电机转速值(表2)。

表2 高于额定风速时,不同风速下的主要参数理想值Table 2 The ideal value of main parameters under different wind speeds exceed the rated wind
表2中λ,β、风轮转速、调速电机转速用区间的形式表示。按措施1计算得到区间左端点(图3中B点)理想值;按措施2计算得到区间右端点(图3中D点)理想值,而最终稳定运行的参数值应属于对应区间。
3 仿真
在Simulink环境下搭建差动调速风电系统模型,其中同步发电机、调速电机、差动轮系为软件自带模块,并为其设计变桨风轮模块[9],[10]。模型输入分别为9,11,14 m/s和16 m/s 4种风速分段阶跃,形成阶跃风速,每阶跃段历时10 s,仿真历时40 s,如图4所示。仿真结果如图5~9所示。
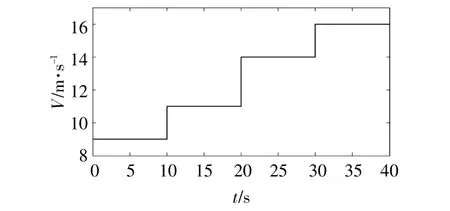
图4 阶跃风速Fig.4 The step wind
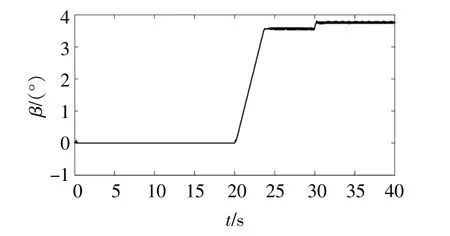
图5 桨距角Fig.5 The pitch angle

图6 λFig.6 The tip speed ratio
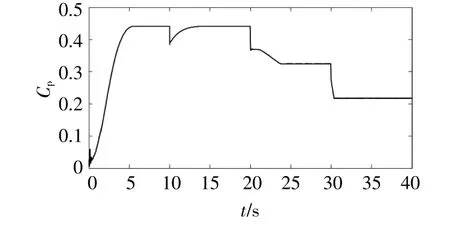
图7 CpFig.7 The utilization of wind energy

图8 风轮、调速电机、同步发电机的转速Fig.8 The rotate speed of wind rotor,speed regulating motor and synchronous generator
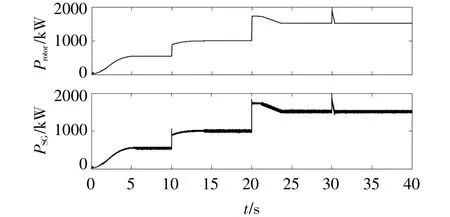
图9 风轮功率和同步发电机功率Fig.9 The power of wind rotor and synchronous generator
图4中,额定风速值为12.7 m/s,高于9 m/s和11 m/s的风速阶跃段,低于14 m/s和16 m/s的风速阶跃段。由图4~9可知:在5~10 s时,以风速9 m/s作为输入,低于额定风速,β保持0°,λ为7.2,Cp为0.45,风轮吸收的功率为500 kW,系统运行在图2所示的A点附近;第10秒时,风速发生突变,阶跃至11 m/s,差动调速系统开始动作,但大惯量风轮转速改变较慢,在风速突变的情况下,λ骤然减小,Cp瞬时降低,如图2所示,但经过历时5 s的差动调速,机组再次以A点状态运行,此时机组输入功率为1 MW;第20秒时,风速再次发生突变,阶跃至14 m/s,风轮吸收的风功率大于机组额定功率值,故按照措施3变桨机构动作,同时差动调速,β历时3 s由0°增至3.5°,差动调速中的电动机转速也由2 000 r/min提升至2 100 r/min,最终使风轮运行在图3所示曲线的C点,机组功率也稳定至1.5 MW;第30秒时,风速再次发生突变,阶跃至16 m/s,机组功率发生突变,通过增加β至3.7°,同时调节风轮转速,机组功率再次降低至1.5 MW。
图5~9中仿真开始至第5秒为载荷输入、机组系统启动阶段,参数不稳定,故以第5秒至仿真结束的参数变化作为重点分析曲线。
4 结论
新型风电机组的差动调速实现功率控制的方法为低于额定风速时,通过差动调速调节传动链各轴匹配转速,以间接增大Cp,实现风轮功率最大化;高于额定风速时,同时开始变桨和差动调速,以间接降低Cp,从而降低机组功率至额定值。具体结论如下。
①结合Cp与β和λ的关系,针对1.5 MW新型风电机组,对低于和高于额定风速12.7 m/s两种工况的控制方法进行了研究,并计算了理想情况下,6种不同风速9,10,11,14,15 m/s和16 m/s时与同步发电机、调速电机、风轮的转速匹配值,以及风轮吸收的功率值。
②在Simulink环境中,以9,11,14 m/s和16 m/s 4分段阶跃风速作为输入,λ,Cp,β、转速、功率等参数的仿真结果与计算理想值相符,验证了利用差动调速的方法对风电机组进行功率控制具有原理可行性。
