基于独立变桨控制的台风下风电机组停机载荷分析
2022-06-22许波峰戴成军王海良汪亚洲纪宁毅刘皓明
许波峰,戴成军,蒋 澎,王海良,汪亚洲,纪宁毅,刘皓明,蔡 新
(1.河海大学 江苏省风电机组结构工程研究中心,江苏 南京 211100;2.河海大学 可再生能源发电技术教育部工程研究中心,江苏 南京 211100;3.中国船级社质量认证公司 南京分公司,江苏 南京 210011;4.新兴重工集团有限公司,北京 100070;5.新兴际华集团技术中心,北京 100070)
0 引言
不断增长的能源需求促进了风力发电行业的迅速发展。为了提升风力发电对化石能源发电的竞争力,风电机组逐步向着大功率大尺寸的方向发展,相应的机组载荷也在不断增加。随着我国海上风电的发展,台风对风电机组的影响受到了更多的关注。
近年来,不断有整机厂商尝试设计抗台型机组,但还是出现了很多风电场受台风影响而造成经济损失的事故。在台风作用下,机组叶片载荷会显著增加,受风切变、塔影效应、湍流效应和对风误差等的影响,载荷的不平衡也更明显。独立变桨控制技术在降低机组的不平衡载荷方面优势明显,学者们主要从独立变桨控制器的输入量[1]、控制器参数的整定方法[2],[3]和降载效果[4],[5]等方面对独立变桨控制技术展开了研究。这些控制技术一般都是控制机组正常发电时的载荷,却很少关注停机过程的控制策略。文献[6]研究了5 MW风电机组紧急停机时传动系统载荷的动态响应,发现紧急停机使转子发生转矩反转,对传动系统造成较大的负面影响。Jiang Z[7]研究了叶片失去控制故障下采用液压驱动变桨的紧急停机控制情况,研究结果表明,在停机过程中产生了较强的系统动力学和共振响应。金鑫[8]分析了基于线性二次型调节(LQR)和干扰自适应控制(DAC)技术的独立变桨控制策略,该控制策略可有效降低风电机组振动以及系统结构的等效疲劳载荷。柯世堂[9]研究了风力发电塔-轮系统的随机风场模拟和风振动力响应,发现风振动力响应以共振分量为主,背景分量和交叉耦合项不能忽略,主要呈现多模态耦合和多振型响应两个特性。丁红岩[10]分析了漂浮式风力发电机组在停机时的变桨控制策略,在不同变桨速率情况下对停机过程的载荷进行了仿真,相对于直接顺桨,采取高速轴刹车并减速顺桨的方法可以有效减小机组系统内部载荷和弯矩的增加量。
以上研究说明,在叶片大型化后,停机过程的不平衡载荷更加显著,需要针对停机设计更优的降载变桨控制策略。风速更大、风向变化更快的台风会加剧机组停机时的载荷冲击,而目前鲜有针对台风环境下机组停机的控制策略研究。
为研究适合台风作用下机组停机的控制策略,进一步提高极端环境下的机组安全,减小机组损坏率,本文设计了应用于台风下风电机组停机控制的独立变桨控制策略。对台风环境下的设计载荷工况中风向变化的极端相干阵风(ECD)和台风极端风向变化(EDCT)两种工况进行载荷动态仿真,分析了机组停机时轮毂极限载荷的变化情况。
1 台风下机组正常停机时的设计载荷工况
为了确保台风环境下风力发电机组的安全,国家质量监督检验检疫总局和国家标准化管理委员会联合发布了《台风型风力发电机组》标准。该标准是在IEC 61400-1等非针对台风型机组标准的基础上,对台风型机组安全运行条件的补充和完善。抗台型风力发电机组的设计载荷工况表由两部分组成,第一部分为正常的设计载荷工况表,第二部分为《台风型风力发电机组》中提出的台风环境下的设计载荷工况表。台风环境下机组正常停机时的设计载荷工况如表1所示,该设计载荷工况为机组风向变化工况,这足以反映抗台型机组的特性并为在台风登陆前仍在发电的机组的安全性提供参考依据。

表1 台风环境下机组正常停机时的设计载荷工况表Table 1 Design load conditions when the unit is normally shut down under typhoon environment
2 独立变桨控制
图1所示为独立变桨控制系统框图。
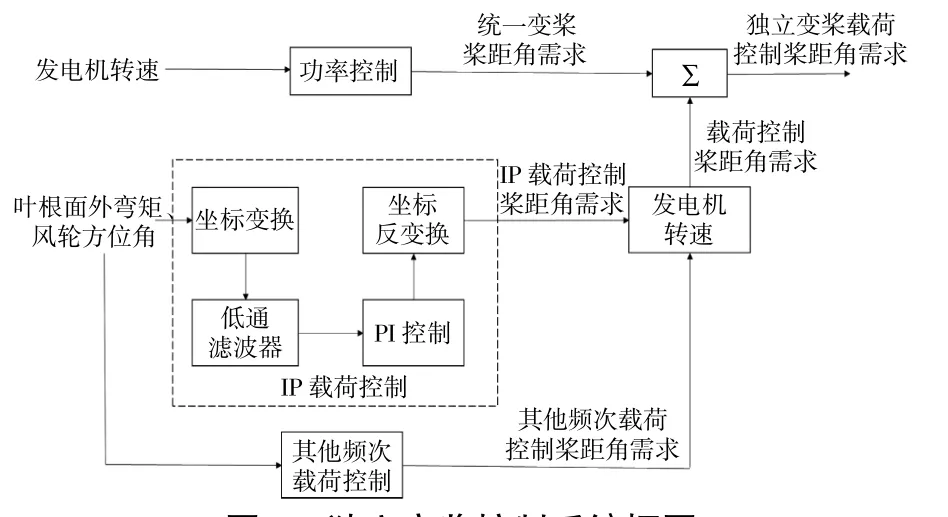
图1 独立变桨控制系统框图Fig.1 Block diagram of individual pitch angle control
独立变桨控制的桨距角需求为统一变桨的桨距角需求与载荷控制的桨距角需求之和。其中,统一变桨的主要控制目标是通过调节桨距角使机组的功率稳定在额定值附近。载荷控制通常分为1P,2P和4P载荷控制(P为风轮旋转频率),目的是减小叶片叶根面外弯矩的1P,2P和4P载荷,在固定轮毂坐标系下表现为降低轮毂MYN和MZN的平均值和3P载荷。
独立变桨控制策略一般是基于叶片叶根载荷的测量量设计的。第i(i=1,2,3)个叶片的叶根MYBi载荷为

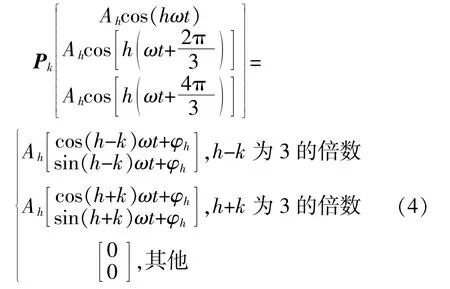
叶片叶根MYB的第h次谐波经过矩阵Pk的坐标变换后满足式(4)所示的关系[11]。MYB中的高次谐波对载荷的影响较小,一般只考虑4P及以下的分量[12]。坐标变换后叶根面外弯矩中的部分高频谐波分量不会消失,因此需要加入低通滤波器以避开高次谐波的影响,通常情况下将此滤波器的截止频率设置为低于3P的一个值。
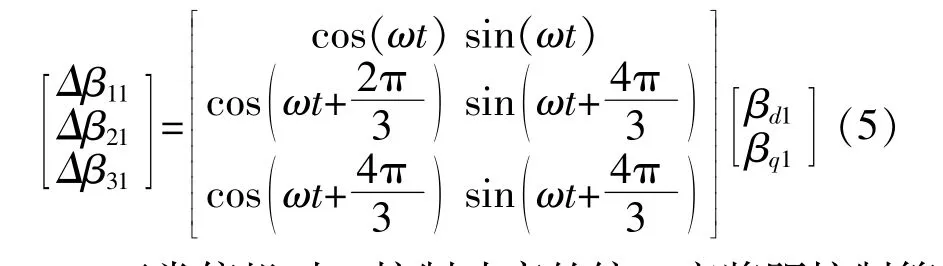
在载荷控制中,PI控制器的输出量是d轴和q轴下的桨距角β需求量,需要进行坐标反变换以得到实际独立变桨三叶片需求的β。以1P载荷控制为例,βd1和βq1在进行如式(5)所示的坐标反变换后,得到了实际独立变桨三叶片需求的桨距角Δβ11,Δβ21和Δβ31。
正常停机时,控制功率的统一变桨距控制策略停止运作,取而代之的是主控发出的顺桨速率需求,因此最终的β为顺桨速率的β与载荷控制的β需求之和。考虑到测量载荷的传感器的延时、变桨驱动机构的机械延迟和滤波器导致的相位偏移等,在进行坐标反变换时会加入一定的相位补偿。其中,测量载荷的传感器的延时相对较低,可以忽略不计;滤波器导致的相位偏移固定不变;变桨机构的机械延迟ΔT通常为几十毫秒甚至几百毫秒[13],在相位补偿中占很大比重。当机组以额定转速运行时,变桨机构的机械延迟导致的相位补偿固定不变。而当机组停机时,机组的转速会在短时间内发生较大的变化,因此变桨机构的机械延迟所导致的相位补偿也应随之变化,本文按照式(6)进行机械延迟导致的相位补偿的设置。

在机组所受的载荷中,科氏力占较大的比重,随着机组转速的下降,由该力导致的载荷会迅速衰减。此外,由于风轮半径可达数十米,因此转速下降一点即可使叶片的相对风速显著下降,从而使风载荷大幅下降。总之,停机时,只需经过很短的时间,机组所受的载荷便会降低很多,即使不进行独立变桨控制也可以保证机组的安全。而随着风轮转速的降低,需要降低滤波器的截止频率才能滤除坐标变换后的高次谐波分量。不断调整低通滤波器的截止频率是一件比较困难的事情,而停机初始时刻,可以采取在设计滤波器截止频率时保留更多裕量的方法满足初始时刻的滤波需求。停机3 s后,机组的转速已经显著下降,即使不进行独立变桨停机控制,机组的不平衡载荷也不会超限。因此,最终的桨距角期望值可按照式(7)进行设置。

式中:Δβ11,Δβ21,Δβ31,Δβ12,Δβ22,Δβ32,Δβ13,Δβ23和Δβ33均为独立变桨控制的桨距角需求量;t0为主控发出正常停机信号时的时间;t为当前时间;v为顺桨速率。
3 仿真与分析
3.1 仿真软件与机组模型
GH Bladed是风力发电机组设计和载荷分析领域应用最为广泛的软件之一,该软件支持以C/C++,Fortran编写的外部动态链接库(DLL)进行仿真机组的控制。但DLL的编程和调试过程比较复杂,而在MATLAB/Simulink中,只需要对相关的模块进行简单的“拖”、“拽”操作即可构建一些主流的控制器。本文基于MATLAB Engine技术和命名管道技术设计了GH Bladed和MATLAB/Simulink交互软件,其数据流向如图2所示。其中机组模型为美国国家可再生能源实验室公开的5 MW风力发电机组模型[14]。
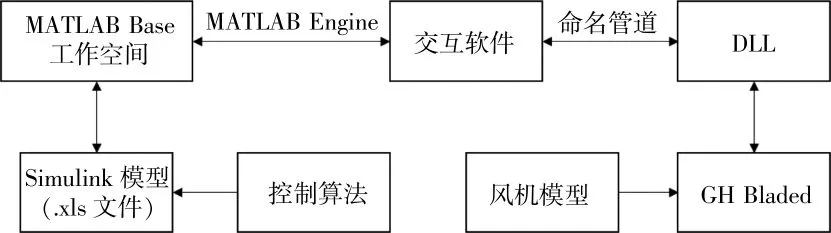
图2 GH Bladed和MATLAB/Simulink交互软件的数据流向图Fig.2 Data flow diagram for GH Bladed and MATLAB/Simulink interactive software
3.2 控制效果对比
为了获得更高的经济效益,机组的偏航对风控制系统并不会实时地跟踪风向的变化。表1中的ECD和EDCT风况存在风向变化的情况,在这两种风况下会存在一定的偏航误差,机组的不平衡载荷较大。ECD和EDCT两个风模型的风向变化均为恒速变化,变化周期分别为10 s和6 s。本文选择在风向变化的半个周期时进行停机控制仿真。台风型机组的风机等级为TIIB,本文按照风速最大值25 m/s(切出风速)设置仿真所用风速。仿真所用前10 s风速为恒定的25 m/s,从第10秒开始分别进入ECD和EDCT,并分别在第15秒和第13秒进行正常停机。图3,4分别为ECD和EDCT下未使用独立变桨停机控制和使用独立变桨停机控制时固定轮毂坐标系下轮毂MYN和MZN的变化曲线。
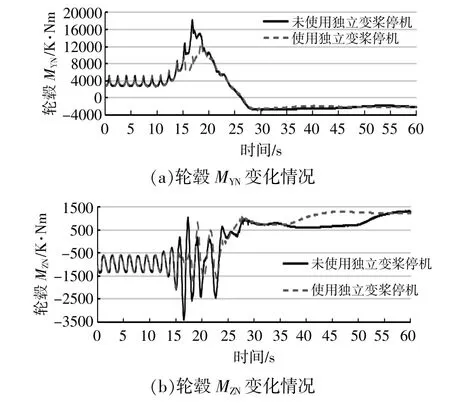
图3 风电机组在台风ECD工况下的载荷变化情况Fig.3 The load variation of typhoon wind turbine under ECD of typhoon

图4 风电机组在台风EDCT工况下的载荷变化情况Fig.4 The load variation of typhoon wind turbine under EDCT of typhoon
由图3,4可知:在主控发出停机信号(ECD为15 s,EDCT为13 s)前,无论采用何种停机控制方式,固定轮毂坐标系下的MYN和MZN均保持一致;在停机初始时刻,采用独立变桨控制策略可以有效减小MYN和MZN,随着独立变桨控制策略的切出,对MYN和MZN的抑制作用逐步消失。
表2为ECD和EDCT下的MYN和MZN的绝对值的最大值(MOAV)对比。由表2可知:使用独立变桨停机控制策略可以有效降低台风下机组停机时MYN和MZN的MOAV;在ECD下,MYN和MZN的MOAV分别降低了27.89%和39.33%;在EDCT下,MYN和MZN的MOAV分别降低了38.46%和39.10%。但采用独立变桨停机控制策略会显著增大机组变桨机构的动作,因此需要在降低载荷和增加变桨机构的机械磨损之间做一个权衡。

表2 MYN和MZN的MOAV对比Table 2 Comparison table of the MOAV of hub MYN and MZN
4 结论
本文对传统独立变桨控制滤波器的设置方法、相位补偿的设置方法和工作时间进行了改进,将其引入到了台风工况下机组的停机控制中。基于GH Bladed和MATLAB/Simulink交互软件进行了ECD和EDCT风况下的停机控制仿真研究。仿真结果表明,本文提出的独立变桨停机控制策略可以将机组停机时MYN和MZN的极限载荷降低27.89%~39.33%。但采用独立变桨停机控制策略会显著增大机组变桨机构的动作,因此需要在降低载荷和增加变桨机构的机械磨损之间做一个权衡。
