深水刚悬链线立管限位锚安装与限位链回接技术研究
2022-06-21李东生檀晓光钟任欢黄秀龙
李东生 崔 宁 檀晓光 钟任欢 黄秀龙
(深圳海油工程水下技术有限公司,广东 深圳 518067)
0 引言
为消除刚悬链线立管底部张力,避免张力导致连接的PLET和跨接管发生拖拽或偏移,须对刚悬链线立管底部进行holdback限位,设计研究深水立管限位锚和锚链对立管进行限位控制,保障水下设施安全和稳定。该套限位系统的适用张力大、稳定性高,但施工难度较大,需要重点考虑施工安装方案。
1 原理概述
该立管限位锚属于吸力锚,与普通吸力锚不同点主要在于其顶部具有锚链捕获及锁止机构,通过限位链连接立管进行限位。同时在该施工项目的设计中,有2种限位方式,一种为立管管道端部PLET限位,一种为立管中部限位,图1和图2为2种类型的限位吸力锚限位方式和顶部结构图。图1为立管中部限位示意图,图2为立管端部PLET限位示意图。
因此,为了实现立管限位的作用,需要安装吸力桩作为限位锚点,通过链条进行连接限位。立管中部限位是在管道中部的两侧进行限位,通常适用于立管海床段有弯曲段,需要在弯曲段后进行限位。立管端部PLET限位是在海管铺设时,将限位锚通过链条连接至立管末端的PLET上,在后方形成限位拉力,保证立管的稳定性。通常适用于立管铺设无弯曲路由,是直线形式。
2 深水限位吸力锚安装技术
刚悬链线立管的应用水深通常较深,在该工程应用中,水深达1400m以上,其安装进度包括位置偏移精度、艏向朝向精度、水平精度、贯入深度等要求。因此,在深水无潜水支持的情况下完成高精度吸力桩安装是技术的重难点。以下主要阐述其实现高精度要求的安装方法。

表1 限位吸力桩安装精度要求
为完成限位吸力锚的精确就位安装,需要从设计到安装都进行全方位的考虑,主要包括以下内容:限位锚设计建造与测试、限位锚吊装与安装分析、水下精确就位与安装以及吸力贯入操作。
2.1 限位锚设计建造与测试

图1 立管中部限位示意图
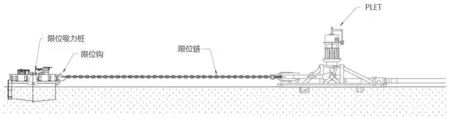
图2 管道末端PLET限位
首先限位锚为吸力桩形式,因此其具有吸力桩的必备结构排水舱口、吸力贯入接口。以便于形成吸力贯入结构。同时,由于为深水作业,须设计制造有ROV交互平台,便于ROV水下引导就位和进行相关调整。并且设计有作为限位链连接的限位结构,以实现立管限位作用。吊点设计为三点吊装,保持稳定性。限位的吸力桩顶部结构如图3和图4所示。
在限位吸力桩建造完成后,需要对其进行陆地测试,以校验相关设计参数以及模拟海上安装,识别问题,以便于在出海安装前将所有可能存在的问题和风险消除,确保其安全圆满安装。在相关各方确认无误后,才可以出具放行条进行出海安装。测试的主要类别见表2。

表2 限位吸力桩陆地测试项
2.2 限位锚吊装与安装分析
限位锚的吊装主要需要考虑2点:1)其吊高比较高,吊装索具的设计需要考虑吊高的影响,参考作业船舶的吊机性能设计吊装索具;2)吊装路径须清爽无干涉,需要对装船的位置和吊装路径提前设计。限位锚安装分析需要考虑的因素:船舶艏向与浪向的角度、过飞溅区计算、各个不同水深的下放速度、着泥速度等要求。以下为南海某项目实际工程应用中,计算分析得出的限位吸力锚的安装分析要求和天气海况限制。该分析考虑船舶艏向与浪向角度为±30°;飞溅区下放速度不超过0.2m/s;水中下放速度约0.5m/s;landing速度推荐AHC(Active Heave Compensation,主动深沉补偿)模式下最小速度0.13m/s。
2.3 水下精确就位与安装
水下精确就位是深水限位锚安装的重点和难点,为实现其就位精度,需要提前布设LBL(Long Base Line)矩阵,形成水声定位系统,通过与吸力桩顶部提前布置好的Gyrocompatt进行信号传递,将限位锚的艏向、位置信息实时传递至船舶中控室定位图上,便于施工监督下达调整和施工指令。同时,为实现精确就位的可视化,可提前在安装位置的精度要求范围内放置Mark buoy(定位浮球),便于ROV协助就位时观察。精确就位的步骤如下。布设LBL矩阵,调试设备;ROV在定位图上限位锚的精度范围外援放置4个Mark buoy,多次打点,保证精度;吊装就位至水下,通过Gyrocompatt与LBL定位系统的实时反馈,船舶中控指挥ROV调整限位吸力桩的艏向和位置,确保都在精度范围内;持续下放着泥,ROV观察牛眼读数,观察吸力桩水平度变化情况,船舶中控监控艏向和位置情况;下放至吸力桩不再自沉,表示第一阶段自沉贯入结束。
2.4 吸力贯入
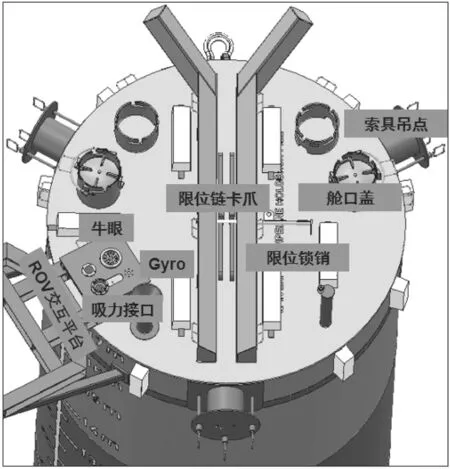
图3 立管中部限位吸力桩顶部结构设计

图4 立管端部限位吸力桩顶部结构设计
吸力桩自沉结束以后,ROV从ROV 工具篮中将舱口盖取出,安装至舱口上,旋紧锁上。ROV将吸力泵的hot stab 插入吸力桩的吸力接口位置,逆时针锁紧。ROV启动吸泥泵,按照设计压力开始吸泥,另一台ROV观察桩身的泥线刻度下沉情况。吸泥过程需要同步以0.13 m/s的速度下放吊机钢丝绳,并设置恒张力,最后的恒张力不能小于吸力桩索具的质量,吸力桩吊装索具质量约为2.5 mt。吸力结束以后,ROV#1断开吸力泵Hot stab的连接。将保护接头安装至吸力接口作为保护。记录吸力桩艏向、水平度、位置、泥线数据等信息。ROV移除吊机索具和回收相关工机具。
3 限位链回接技术
管道末端PLET限位在立管铺设时,由铺管船将末端PLET下放后,由ROV将PLET的限位链条迁移至限位吸力锚的限位钩位置,扣紧和关闭限位钩,再将锁销插上完成限位。如图2所示。由于操作简单,不再描述和介绍。
立管中部限位结构主要分为2个部分:短链和长链。短链与SCR为一个整体,随铺管船铺设至海床;长链由工程船吊装下放,然后由ROV将短链与长链连接在一起,并铺设链条至限位锚进行锁紧限位。由于短链比较重(约450kg),为便于连接,需要将其进行漂浮状态进行ROV回接作业。因此,在铺设SCR时,在短链上绑扎有一个小的浮球。铺设完成后,工程船抵达该位置,通过配重块下放一个大的浮力块(浮力约500 kg),将短链漂浮。工程船再将长链下放至水下,ROV完成长链和短链的连接。步骤如图5所示。
为便于铺设锚链时观察是否出现打扭情况,在陆地准备时将锚链的上侧涂成白漆,便于深水水下ROV观察。同时由于长链较长,无法使用吊机直接挂钩整条锚链起吊。因此设计成将锚链来回折成多段,由吊机起吊连接点。同时根据链条的特性,区分和编号链条,保证安装时不会出错。并且为保证限位链环在卡槽位置方便ROV调整,就位链环至卡槽内,在陆地时在设计位置附近的链环上绑扎有monkey fist(绳结)。同时,考虑到水下应急情况,出现回收限位链的情况,在限位链的前后设置应急回收索具。
工程船移船铺设限位链条至限位锚位置,ROV监控限位链铺设情况,确保白色涂漆面朝上。限位链铺设进限位锚的链条导向槽内,ROV确认链环卡入限位槽内,ROV插入插销,锁紧限位链条。工程船继续铺设,将链条平铺至海床,最后由ROV解钩悬挂索具。
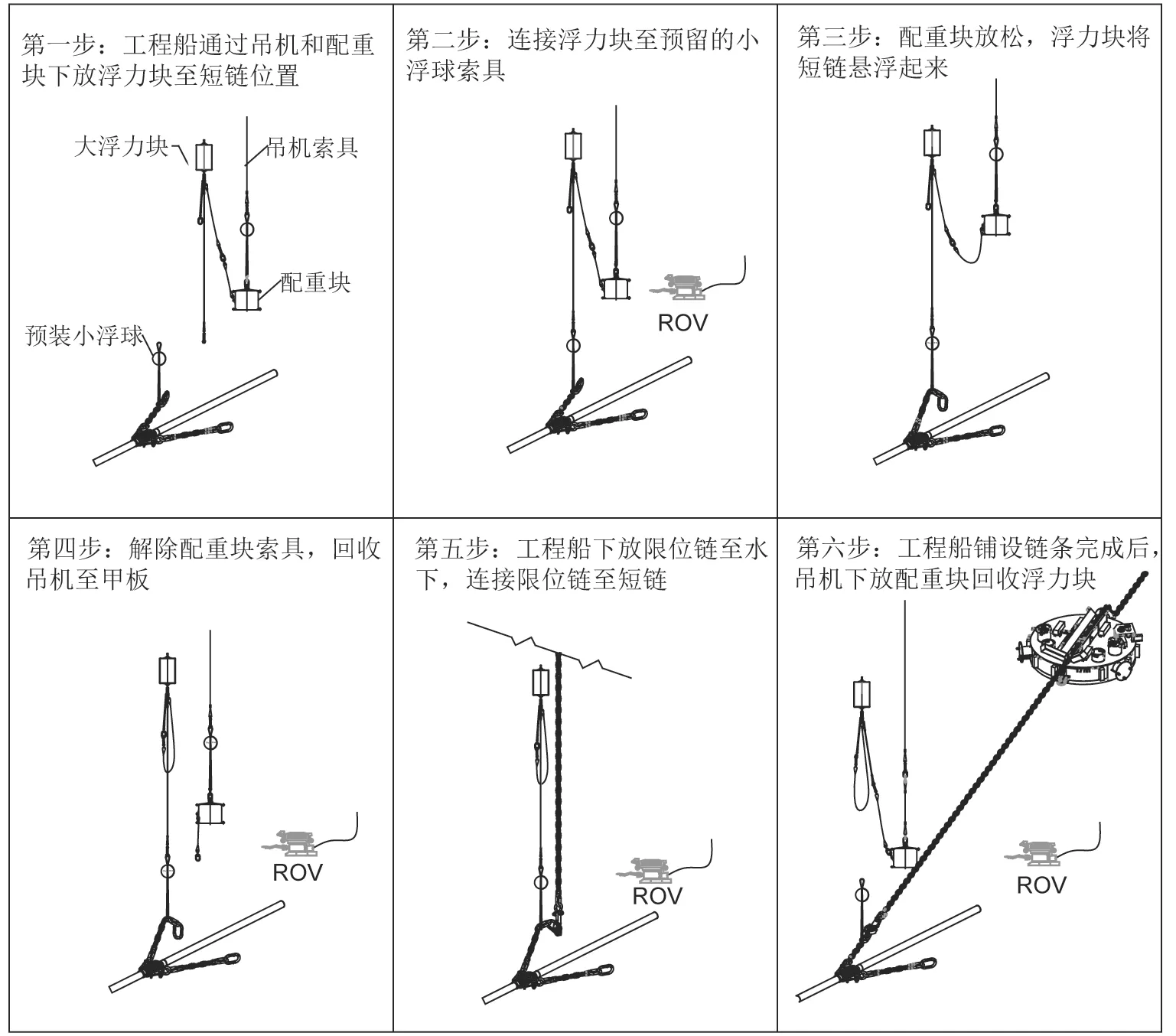
图5 ROV连接短链与长链
4 结语
深水刚悬链线立管限位吸力锚安装和限位链回接技术涉及水深较深,在国内的海洋石油工程中属于前沿施工和技术,国内的海洋石油开发逐步正走向深水,在后续的深水油气田开发中将会应用得非常广。该技术的开发与应用为后续的类似SCR限位作业提供思路以及施工参考案例。
