牛羊养殖电动推料机设计与试验*
2022-06-20王保兴董和银范国强王金星王忠宇吴爱兵
王保兴,董和银,范国强,王金星,王忠宇,吴爱兵
(1. 山东农业大学机械与电子工程学院,山东泰安,271018; 2. 山东省农业装备智能化工程实验室,山东泰安,271018;3. 山东省园艺机械与装备重点实验室,山东泰安,271018; 4. 泰安意美特机械有限公司,山东新泰,271215;5. 泰安市畜牧智能装备产业技术研究院,山东新泰,271215; 6. 农业农村部南京农业机械化研究所,南京市,210014)
0 引言
近年来,我国推动牛羊养殖业向集约化和规模化转变,取得了显著的成效。但小规模牧场仍占比较多,且机械化程度低,饲养模式和管理模式都不具有科学性[1]。由于国内玉米、大豆等牛羊养殖常用饲料农作物种植面积减少,以及国际市场相关饲料价格不断升高,导致我国牛羊养殖业面临一定风险[2]。25%的牧场由于鲜牛乳价格低、饲料成本上升和招工难等问题导致奶牛存栏量锐减[3-4]。
为了提高国内牛羊养殖业抵抗风险的能力,需要继续提高牛羊养殖业的现代化水平。针对这一问题,需要改变传统的饲喂方法,以减少饲料的浪费、降低成本。在传统饲喂过程中,撒料车将饲料抛撒在牛羊的围栏边缘供牛羊食用,但牛羊在食用过程中会将大量的饲料拱出饲喂区域,如果不及时推回会造成饲料的浪费。目前国内牧场中的饲料回推作业主要依靠装载机或人工实现,人工作业劳动强度大且效率低,且随着近年来劳动力成本逐年提高,导致饲喂成本上升。通过改造装载机可以推回饲料,但大材小用且效率低。所以牧场饲喂中的饲料回推工作需要一种机械化程度很高的机械设备代替人工作业。沈治[5]研制了自适应PID控制的自动推料机器人,焦盼德等[6]研制了奶牛智能推料机器人,袁玉昊等[7]研制了精料撒料及推草机器人。但这些推料机器人适用于大型机械化和智能化程度较高的牧场,无法适用于大量小规模牧场。
针对我国牛羊饲喂现状,设计一种集推料与扫料于一体的电动推料机,该推料机由电力驱动,只需一人操作即可实现推料、扫料和巡逻等功能,能够代替人工作业,提高作业效率并降低劳动成本,以实现在牧场中机械化推料的目的。
1 整机结构与工作原理
1.1 整机的结构
电动推料机主要由推料板、液压系统、照明系统、转向机构、行走机构、清扫机构、车架、驾驶室、牵引架组成。整机结构如图1所示。

图1 电动推料机结构示意图
电池组为行走机构和液压系统提供动力,由人工操作转向机构控制行走机构的前轮实现推料机的转向。行走机构主要由前轮、后轮、车桥和电机组成,电机驱动后轮为整车的行走提供动力,前轮控制车的行进方向。推料机构主要由2个液压缸和推料板组成,液压缸控制推料板运动,实现推料板升降和转向功能。清扫机构安装在推料机的一侧,通过1个液压缸控制清扫柱刷的上升与下落并通过1个液压马达控制柱刷旋转,便于清扫牧场。车前方的照明系统由电池组提供电力,能够实现在光线阴暗以及夜晚情况下的作业。车架后方的牵引架能够牵引其他车辆或机械装置,可以实现一车多用。电动推料机的设计参数如表1所示。

表1 整机参数Tab. 1 Whole machine parameter
1.2 工作原理
电动推料机在进行推料工作时首先打开电源开关,然后行驶到工作区域。通过控制阀杆操纵推料机构的2个液压缸,使推料板下降到合适的高度并调整推料板的角度。之后驾驶推料机前进,并根据推料效果选择合适的作业速度;同时也可控制柱刷与地面接触并驱动其旋转,清理未被推料板推动的残余细小饲料。当电动推料机进行清扫工作时,首先通过控制阀杆把推料板升到最高位置,使其远离地面。随后再通过控制阀杆操作清扫系统的液压缸使得柱刷下降到与地面接触的位置,驱动液压马达使柱刷旋转,驾驶推料机前进开始清扫工作。
1.2.1 推料机构
推料机构是电动推料机中最关键的部分,主要由升降液压缸、升降板、三角块、转向液压缸和推料板组成,如图2所示。

(a) 主视图
推料机构中的升降液压缸固定于车体外壳,升降液压缸的推杆与升降板连接,控制升降板的升降运动。三角块与升降板的一侧采用铰接,转向液压缸的两端分别连接三角块与升降板,推料板与三角块焊接,通过操纵转向液压缸推杆的伸缩可以控制推料板调整推料方向。通过升降液压缸与转向液压缸的相互配合可以将推料板调整到合适的位置进行推料工作。
1.2.2 清扫机构
清扫机构主要由柱刷、柱刷罩、液压缸和液压马达组成,如图3所示。
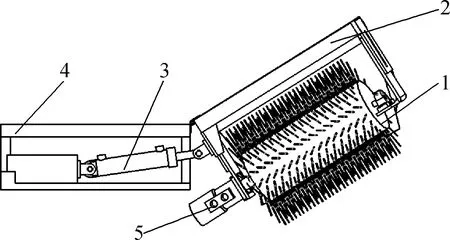
图3 液压清扫机构结构示意图
清扫机构中的液压缸的缸体通过铰接的方式固定于车架,液压缸的推杆与护罩通过铰接的方式连接,护罩又与车架铰接于一体。柱刷远离车架的一端通过轴承座固定在护罩上,柱刷接近车架的一端与液压马达相连接,驱动柱刷旋转,同时液压马达安装在护罩上。
此结构可以通过控制液压缸的伸缩实现柱刷收起与下落动作,当不需要进行清扫工作时,液压缸推杆伸出,护罩带动着柱刷向上做收起运动;当进行清扫工作时,液压缸推杆收缩,护罩连同柱刷一起向下运动,运动到与地面平行且接触的位置停止液压缸推杆的运动,启动液压马达带动柱刷旋转,开始工作。
1.2.3 液压系统
电动推料机的液压原理图,如图4所示。液压泵由电机带动旋转后从油箱中吸油,油液经过滤器进入到液压泵中,进而流入到三位四通换向阀和二位二通换向阀中,以控制升降液压缸、转向液压缸、柱刷液压缸以及液压马达,最终回到油箱。

图4 液压系统原理图
2 关键部件设计
2.1 清扫机构的设计
清扫机构能够实现清理牧场环境的功能,其主要工作部件为柱刷,柱刷的清扫宽度为0.5 m,半径为0.25 m,柱刷工作时的转速为300 r/min,刷毛采用尼龙材质,经研究发现尼龙材质的柱刷清扫性能更好,同时能够适应国内传统的牛舍、羊舍和牧场中狭窄的道路[8]。柱刷外侧设有120°的护罩,可以有效降低工作时产生的飞尘对驾驶员的影响。
如图5所示,柱刷工作时,推料机以速度v带动柱刷前进,同时柱刷以线速度vm逆时针旋转,清扫前进道路上的杂物。根据设计目标推料机速度v为5 m/s。刷毛与地面接触后,受地面的影响刷毛会变形。设刷毛与地面刚接触时的极限位置为点A,刷毛与地面接触的垂直位置为点B,刷毛离开地面的极限位置为点C。刷毛由A点运动到B点经过的角度为β,刷毛的变形量也由零增加到最大值,当由B点运动到C点时,变形量由最大值逐渐降低到零。在此过程中,刷毛的变形以及刷毛与地面的摩擦都会消耗功率。

图5 柱刷工作示意图
柱刷在工作时所消耗的功率
P=Pa+Pb+Pc
(1)
式中:Pa——刷毛和地面摩擦所消耗的功率,kW;
Pb——刷毛变形所消耗的功率,kW;
Pc——柱刷克服空气阻力所消耗的功率,kW。
刷毛和地面摩擦所消耗的功率[9]

(2)
式中:N——刷毛变形后对地面的作用力,N;
μ1——刷毛与地面的摩擦,μ1=0.4[10];
v——推料机的工作速度,5 m/s;
vm——柱刷的线速度,m/s;
η——传动效率,由于柱刷与液压马达直接相连,所以η=100%。
刷毛变形后对地面的作用力[11-12]

(3)
式中:d——刷毛直径,0.002 m;
Rm——柱刷半径,0.25 m;
l——刷毛的长度,0.15 m;
E——刷毛材料的弹性模量,取1×1011Pa[2];
J——刷毛摩擦截面的惯性矩,m4;
h——刷毛接触地面因弯曲产生的变形量,0.02 m;
zB——工作时与地面接触的刷毛的数量。
刷毛摩擦截面的惯性矩
(4)
工作时与地面接触的刷毛的数量
(5)
式中:B——柱刷的清扫宽度,m。
(6)
柱刷的线速度
(7)
式中:n——转速,300 r/min。
经计算得刷毛与地面接触后变形作用到地面上的力N=270.73 N,刷毛与地面摩擦所消耗的功率Pa=1.39 kW。
柱刷在工作时,刷毛与地面摩擦消耗部分功率,刷毛与地面接触后变形也会消耗部分功率,因此刷毛变形所消耗的功率[13]

(8)

(9)
计算得出刷毛变形所消耗的功率Pb=0.97 kW。柱刷旋转时因空气阻力的作用也会消耗部分功率,因空气阻力所消耗的功率
Pc≈0.01Pa
(10)
计算得柱刷旋转因空气消耗的功率Pc=1.39×10-2kW。故柱刷工作时所消耗的总功率P=2.373 9 kW。
2.2 推料机构的设计
推料板是电动推料机推料机构中最主要的部分,推料板需要将远离围栏的饲料推回到围栏边缘。如图6所示,推料板主要由两部分组成分别为推板和橡胶板,推板用Q235普通碳素结构钢制作,其长度L4为1.2 m,在推板的下方安装一橡胶板,橡胶板通过螺栓与推板固定,橡胶板比推板多向下延伸L3=0.04 m距离,防止推板直接与地面摩擦,能够提升推料效果;因该推料机构的设计主要是利用推料板左侧部分工作,故在推板左侧也用螺栓将橡胶板安装在推板上,橡胶板也比推板多向左延伸L3的距离。

图6 推料板示意图
推料板工作时的示意图如图7所示,K为饲料区域,工作时,液压缸会围绕点O2在角度α2的范围运动,液压缸的伸缩能够控制推料板中心线O1N1围绕O1在角度为α1的范围内运动,从而可以根据实际情况调整合适的推料角度,将远离围栏的饲料推回到围栏边缘,供牛、羊食用。

图7 推料工作示意图
推料板完成推料工作后,需要将推料板提升以远离地面,减少橡胶板与地面的摩擦,等到下次工作时再将推料板下降。设计如图8所示的升降机构达到其升降效果,升降板正面焊接有液压缸安装座与图7中的液压缸相连接,升降板的背面连接有滑块和导轨,由安装在车架上的液压缸控制升降板上下滑动[14-15]。
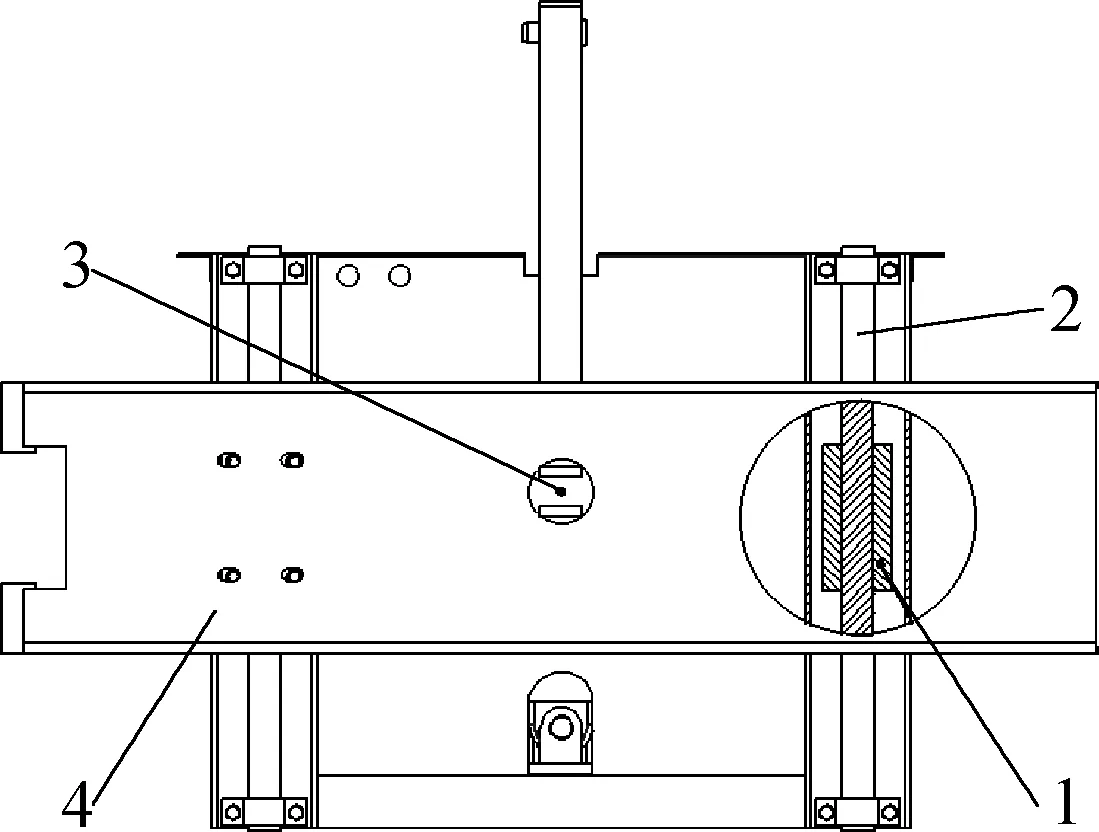

(a) 主视图 (b) 侧视图
电动推料机推料机构的推料功能通过控制图7和图8中的两个液压缸实现,图7中的液压缸控制推料方向,图8中的液压缸控制推料板的升降运动。
2.3 驱动电机的选型及传动比的计算
对推料板的推料过程进行受力分析,如图9所示。图9(a)为推料板推料过程的三维示意图,图9(b)为俯视图,图中K所在的阴影区域表示饲料,面A1B1C1D1表示推料板。沿推料机的前进方向为x轴的正方向,垂直地面向上的方向为y轴的正方向,垂直于xy面指向饲料宽度方向为z轴正方向。

(a) 三维示意图 (b) 俯视图
按最大有效推料量进行受力分析,而最大有效推料量取决于推料板的面积和饲料的堆积角。最大有效推料质量
(11)
式中:ρ——青贮饲料密度[16],取值420 kg/m3;
L5——推料板高度,取值0.4 m;
ε——青贮饲料堆积角[17],取值39.8°。
青贮饲料与地面的摩擦力
fa=μamg
(12)
式中:μa——青贮饲料与地面的摩擦系数[18],取值0.6。
青贮饲料与推料板的摩擦力
fb=μbFN
(13)
式中:μb——青贮饲料与推料板的摩擦系数[18],取值0.565;
FN——推料板对青贮饲料的力。
联合式(16)~式(18)进行求解
FN2+fb2=fa2
(14)
计算得FN=255.95 N,fb=144.61 N。
当推料板与z方向的夹角大于物料与推料板的摩擦角时,青贮饲料才能沿推料板流动。随着推料板角度的增大,青贮饲料需要推料机沿x方向提供的力也就越小。所以青贮饲料需要推料机沿x方向提供的最大力
(15)
式中:β1——推料板的推料时的摩擦角,取值29.47°。
摩擦角β1是由青贮饲料与推料板之间的摩擦系数μb求得的。在进行推料工作时,人和推料机与地面间的摩擦力
Fc=μc(m1+m2)g
(16)
式中:μc——轮胎与地面的摩擦系数,取值0.02;
m1——推料机的质量,取值670 kg;
m2——人的质量,取值80 kg。
推料机推料过程中驱动推料机和青贮饲料运动的总功率
P=Fcvc+Ffvc
(17)
总功率P=612.98 W,根据总功率P选择推料机的驱动电机,根据设计方案推料机有牵引其他车辆和机械装置的需求,同时考虑负载特性以及蓄电池供电的特性,选择直流串励电机,该电机能够提供较大的启动转矩可达到额定转矩的5倍左右,同时转速变化范围较大,调速范围在1∶3以上,适合低速大扭矩推料工作和高速巡逻等功能。所选电机的具体参数如表2所示。

表2 驱动电机参数Tab. 2 Drive motor parameters
根据设计要求推料机在巡逻状态下行驶速度最高为15 km/h,则车后驱动轮转速应为177.3 r/min,而电机的输出转速为3 500 r/min所以需要车桥提供的传动比
(18)
式中:n1——电机输出转速;
n2——车轮驱动轮转速。
求得在巡逻状态下车桥传动比i为19.7,根据电机和传动比的要求,同时为了便于电机与驱动车桥的安装,选择电机车桥一体式结构,其传动比为20,实际最高速度为14.805 km/h,约为15 km/h满足要求。
在推料过程中,驱动轮的负载扭矩
T=(Fc+Ff)R
(19)
式中:R——推料机后轮的半径,225 mm。
计算得负载扭矩T为106.722 N·m。在推料过程中电机提供给驱动轮的最大驱动扭矩
(20)
求得驱动轮的最大扭矩Tm为163.7 N·m大于负载扭矩,所以在推料过程中推料机能够正常运动。在此最大扭矩时推料速度
(21)
计算得在最大扭矩时的推料速度vcm=4.948 km/h,约为5 km/h,满足要求。
3 试验结果与分析
本试验在天津市福沃奶牛养殖专业合作社进行,用撒料车抛撒青贮饲料到奶牛围栏边缘,撒料后饲料堆积在围栏边缘,饲料堆的截面形状近似为三角形,如图10所示,此时饲料堆的宽度为0.8 m。

图10 撒料后青贮饲料堆形状
奶牛在食用过程中会将青贮饲料拱到较远位置,其中青贮饲料离围栏边缘的最大宽度可达到1.7 m,如图11所示。但是经过测量发现奶牛食用后的青贮饲料堆宽度平均为1.2 m,如图12所示。

图11 食用后宽度最大的青贮饲料堆

图12 食用后一般宽度的青贮饲料堆
驾驶电动推料机以5 km/h的作业速度进行在不同位置进行多次推料作业,推料机经过后的地面上未出现大范围饲料未被推离的现象,仅保留有极少数细微的青贮饲料颗粒,电动推料机能够有效地将青贮饲料推到围栏边缘。推料后,青贮饲料堆宽度为0.7 m,成年奶牛的采食区域为距离围栏0.8 m范围内,所以能够满足奶牛食用需求。
推料机清扫效率
Q1=3 600Bvqkn
(22)
式中:kn——重叠系数,取值0.9;
vq——测试中推料机前进速度,取1.39 m/s。
推料机推料效率
(23)
相关试验测试数据如表3所示。
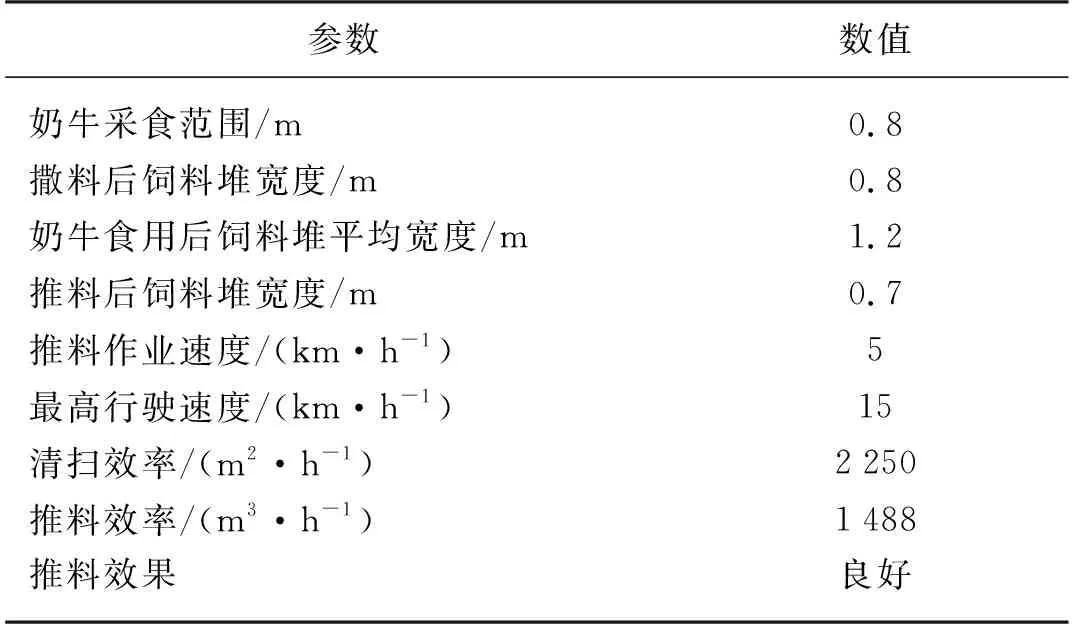
表3 试验测试结果Tab. 3 Test result
经过试验发现,电动推料机各部件均能正常工作,远离围栏的饲料均能被推回围栏边缘,既方便了奶牛的采食又避免了饲料的浪费,同时降低人工劳动强度,提高了工作效率,达到预期效果。
4 结论
针对在国内传统的牛羊饲喂过程中,牛羊在采食过程中会将饲料拱出饲喂区域,需要人工将远离围栏的饲料推回围栏边缘,人工劳动强度大,作业效率低这一问题,设计一种牧场用电动推料机,该推料机能够代替人工推料,只需一人即可完成推料工作,降低劳动强度且作业效率极高。通过对关键机构进行设计计算,建立推料作业的理论模型,为后续研究和改进提供了理论基础。
电动推料机采用电力驱动不会排放有害气体既防止奶牛吸入有毒气体损害身体健康又起到保护环境作用。电动推料机集推料、清扫、巡逻和牵引其他机械多功能于一体,真正实现了一机多用。推料宽度为1.2 m,清扫宽度为0.5 m,最高行驶速度最高可达到15 km/h。整车的动力由安装在车内部的电池组提供,其结构主要包括推料机构和清扫机构,推料机构采用2个液压缸实现推料板的灵活运动,能够根据每个牧场的不同情况调整推料角度,达到最佳工作效果;清扫机构主要利用液压马达控制柱刷的转速,通过液压缸控制柱刷的升降运动,该机构可清除推料后残留在地面上的饲料。通过试验验证,该机能够将远离奶牛饲喂区域的饲料顺利推回到奶牛饲喂区域,达到预期效果。
