基于显式模型预测控制的轮毂驱动电动车垂向振动研究
2022-06-17李仲兴李忠远刘晨来
李仲兴, 李忠远, 刘晨来
(江苏大学 汽车与交通工程学院, 江苏 镇江 212013)
环境和能源问题已成为国际社会广为关注的主题,电动汽车作为一种环境友好和低碳经济的交通工具应运而生。轮毂驱动电动车具有结构紧凑、传动效率高和动力可控等优点,已成为研究的热点领域[1];但由于其采用分布式的布置方式,造成非簧载质量增加,影响了车辆的行驶平顺性和操纵稳定性。
针对以上问题,国内外学者在悬架控制及阻尼调节方面展开研究并取得一系列成果。钟银辉等[2]探究了开关磁阻电机激励对车辆性能的影响,并基于FxLMS算法进一步实现对主动悬架的控制,抑制了振动负效应;汪若尘等[3]提出了一种集成电磁悬架的悬置式新结构,并采用天棚控制策略进行分析,验证了所提新结构以及控制方法的可行性;李哲等[4]构建不平衡径向力建立悬架耦合模型,并提出基于多目标粒子群算法的电磁主动悬架优化设计方法,通过对控制器参数的优化设计,有效削弱振动负效应;李佩琳等[5]提出一种考虑时滞的主动悬架H∞控制策略,实现了对带有时滞主动悬架系统的有效控制;Wang等[6]设计了一种有限频率状态反馈H∞控制器,实现了对目标频率范围的干扰抑制;Ibrahim等[7]提出基于模糊控制和H∞控制的主动悬架控制策略,并通过仿真试验验证了所提方法的有效性;Luo等[8]基于音圈电机作为作动器,构建主动悬架系统,提出了一种串级控制方法,试验表明主动悬架性能得到明显改善。
综上所述,目前对轮毂驱动电动车的研究主要集中考虑悬架和轮毂电机两方面因素,对轮胎的考虑较少,并且控制方法多为在线计算,计算耗时较长。据此本文提出一种显式模型预测控制(explicit model predictive control, EMPC)策略,建立1/4轮毂电机与空气悬架(hub motor-air suspension, HM-AS)系统模型,考虑轮胎内部垂向力,EMPC采用离线计算、在线查找的方式,并基于多参数二次规划理论构建显式多面体分段仿射系统,综合考虑时域和频域两方面因素,降低车身垂向加速度、轮胎动载荷和轮毂电机偏心距,有效抑制振动负效应,改善车辆的行驶平顺性、操纵稳定性和电机性能。
1 1/4 HM-AS系统模型
1.1 不平衡电磁力模型
本文轮毂电机选用外转子永磁无刷直流电机。轮毂电机的气隙磁场包括永磁体磁场和电枢反应磁场。在极坐标系下,分别计算永磁体、电枢反应磁场,并采用线性叠加法,将上述两者相加,得到轮毂电机偏心状态下径向气隙磁场和切向气隙磁场[9]
Ber(r,α,t)=[Bmr(r,α,t)+Bar(r,α,t)]εδ
(1)
Bet(r,α,t)=[Bmt(r,α,t)+Bat(r,α,t)]εδ
(2)
式中,Bmr和Bar为非偏心时永磁体和电枢绕组的径向磁场;Bmt和Bat为非偏心时永磁体和电枢绕组的切向磁场;r为极坐标系极径;α为极坐标系极角;εδ为偏心时磁导修正系数。
偏心时磁导修正系数εδ为

α+φ)
(3)
其中,
式中:e为轮毂电机偏心距;δ0为实际气隙长度;μr为相对回复磁导率;hm为永磁体厚度。
轮毂电机工作时,定转子之间产生偏心,进一步产生垂向不平衡电磁力Fez为

2[Ber(r,α,t)·Bet(r,α,t)]cosα}dα
(4)
1.2 刚性环轮胎模型
本文考虑垂向振动,建立刚性环轮胎模型。从文献[10]中可以得知,不考虑轮胎胎体形变时,轮胎带束运动可视为刚体运动,因此可以将轮胎胎体部分视为刚性环。轮毂电机与车轮通过螺栓固定连接,且轮毂电机外转子与车轮同步运动。从图1可以看出,刚性环轮胎模型在垂向上简化为车轮、环形弹簧和减振器,并引入接地弹簧来表示轮胎形变,计算轮胎与地面在垂直方向上的垂向力[11]。图1中:mt为轮胎质量;mms为定子质量;mw_mr为车轮与转子质量;kbeaz为垂向轴承刚度;kt_rd为轮胎径向刚度;ct_rd为轮胎径向阻尼;kcz为轮胎残余刚度。
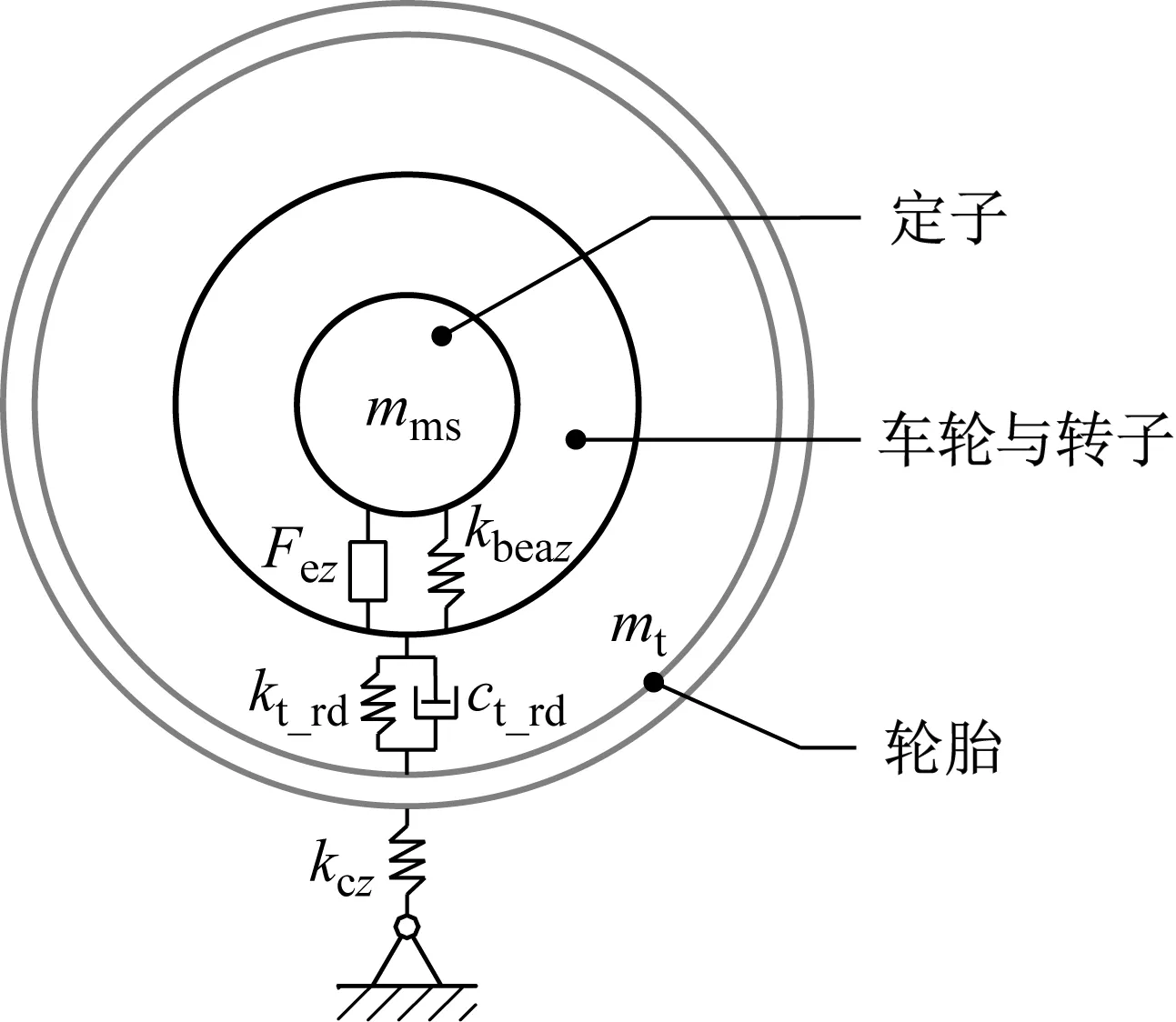
图1 刚性环轮胎模型与BLDC模型结构Fig.1 Structure of rigid ring tire model and BLDC model
1.3 四质量系统模型
HM-AS系统结构组成如图2所示:包括轮毂电机、空气悬架和轮胎。以轮毂电机气隙为分界面,将轮毂电机分为内定子与外转子,结合刚性环轮胎模型、空气悬架模型并引入由电磁作动器产生的主动力,将传统1/4车辆二自由度振动模型转化为1/4车辆四自由度振动模型,其垂向振动模型如图3所示,振动微分方程为

(5)

图2 轮毂电机与空气悬架结构Fig.2 Structure of hub motor and air suspension

图3 四质量系统模型Fig.3 Four mass system model
其中,
式中:ms为簧载质量;zs、zt、zms、zw_mr分别为簧载质量、定子质量、车轮与转子质量、轮胎质量垂向位移;q为路面激励;g为重力加速度;Ae为空气弹簧有效面积;k为多变系数;pa为大气压强;p0为空气弹簧初始气压;fd为悬架动行程;V0为空气弹簧初始体积;cs为减振器阻尼系数;Fspr为空气弹簧力;Fdam为阻尼力;Fbeaz为电机垂向轴承力;Fs为主动力;Ft轮胎内部垂向力。
1.4 路面模型
本文采用随机路面作为激励,路面功率谱密度的幂函数表达式[12]为
(6)
式中:n为空间频率;n0为参考空间频率;Gq(n0)为路面不平度系数。
建立基于滤波白噪声的时域随机路面模型,其表达式为
(7)
式中:n00为路面空间截至频率;w(t)为白噪声激励;v为车速。
本文以B级路面为例,即路面不平度系数Gq(n0)=64×10-6m3,车速v=30 km/h,随机路面输入下的车轮垂向位移如图4所示。
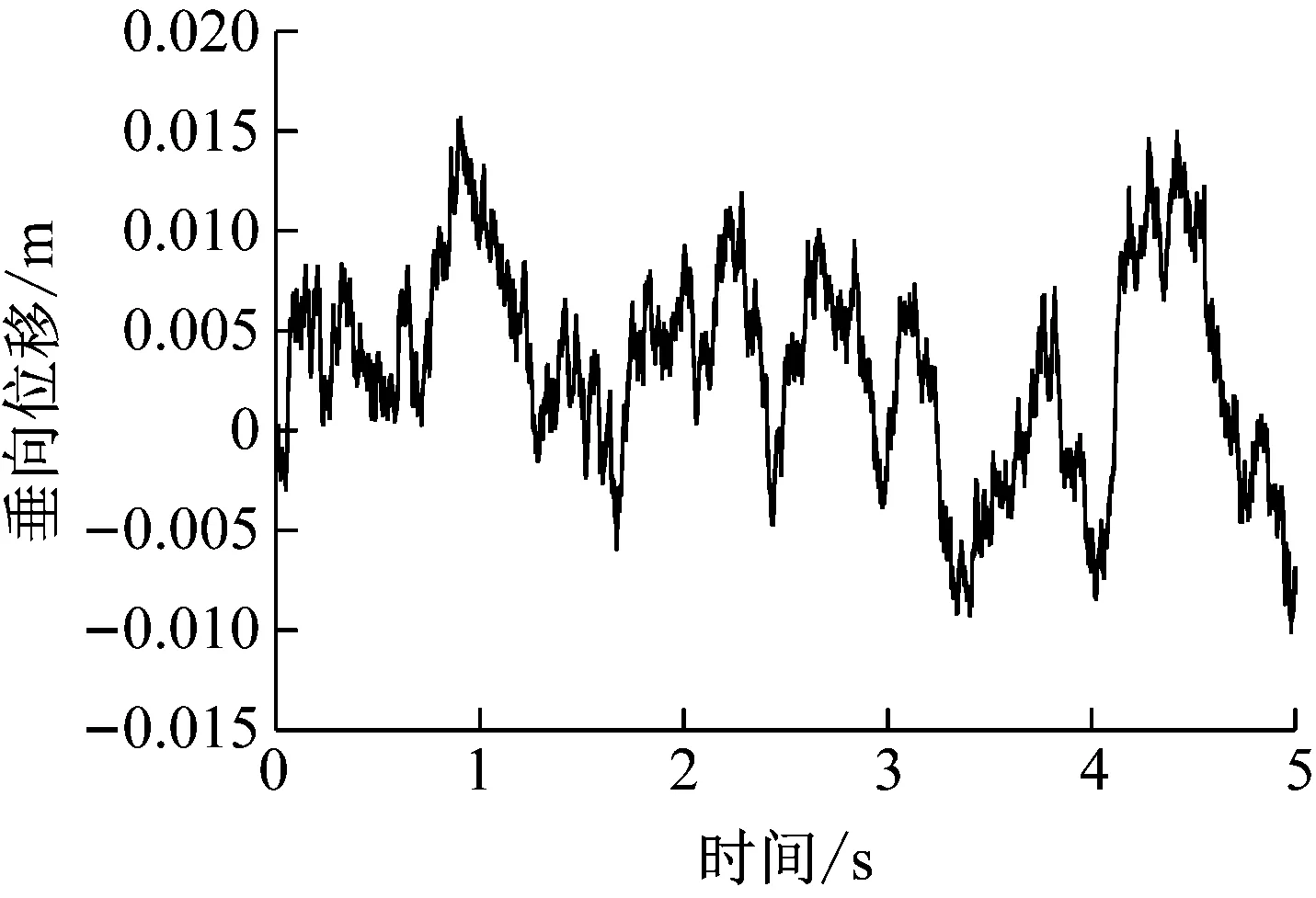
图4 随机路面输入下的车轮垂向位移Fig.4 Wheel vertical displacement under random road input
2 HM-AS系统显式模型预测控制
2.1 MPC控制器设计
MPC的控制思想是明确使用系统预测模型来预测系统未来时刻的输出,在每个采样时刻,MPC通过有限时域内的滚动优化使性能指标最小,在线计算获得最优控制序列,并将第一个控制量作用于系统,同时在下一时刻根据系统输出和预测之间的误差校正未来输出。根据式(5)中所示的振动微分方程,系统的状态空间可以写为
(8)

矩阵A、B进一步计算为
系统输出定义车身垂向加速度、悬架动行程、轮毂电机偏心距和轮胎动载荷为
(9)
同样,矩阵C、D进一步计算为
由于MPC用于解决离散时域内的最优问题,因此对式(8)进行离散化处理,进一步以状态空间的形式获得满足MPC控制器设计要求的离散时间模型为
(10)
其中,
式中:Ts为离散时域步长;τ为积分时间常数。
MPC控制器的设计目标是找到最优控制率u(k),以主动力约束和动力学方程为基础,在行驶平顺性、操纵稳定性和电机使用寿命方面优化车辆主动悬架和电机的性能。本研究考虑悬架动行程约束|fd|≤0.05 m,同时考虑主动力约束|Fs|≤5 000 N,选择最优预测时域Np、最优控制时域Nu

(11)
式中:NP为预测时域;Nm为控制时域;Q为目标权重矩阵;R为输入权重;yref为目标参考轨迹,在本研究中表示车身垂向加速度、悬架动行程、轮毂电机偏心距和轮胎动载荷参考值。
然后,采用滚动时域优化策略,得到车辆主动悬架系统MPC的控制律:
(1) 在k时刻获得系统状态xk;
(2) 利用混合整数规划理论求解下列二次问题;
(12)
(3) 将计算出的第一个控制量作用于系统优化问题;
(4) 将预测时域向前移动一步,在k+1时刻重复以上过程。
2.2 EMPC控制器设计
Bemporad[13]提出在模型预测控制中引入多参数二次规划理论(multi-parametric quadratic program, MPQP),将隐式MPC过渡到EMPC。EMPC引入多参数二次规划理论,对系统的状态区域进行凸划分,离线求解每个状态分区上的线性状态反馈最优控制律,并得到显式多面体分段仿射(polyhedral piece-wise affine, PPWA)系统[14]。EMPC在线实时控制时,根据系统状态值查找所在多面体分区,接着调用对应的显式线性控制律得到最优控制律,由于无需反复在线优化,相比隐式MPC,效率明显提高[15-18]。
图5所示为本文所提基于EMPC控制理论的HM-AS系统控制框图,实线代表离线求解过程,虚线代表在线控制过程。EMPC控制策略分为三部分,首先根据动力学理论,建立预测时域内的目标函数及约束条件,将对提升行驶平顺性、操纵稳定性和电机性能的问题转换为求解最优主动力的问题,然后采用EMPC控制方法,运用MPQP理论,离线求解并得到多面体分段仿射系统,接着通过显式控制律求得每个状态分区上的最优控制向量,最后通过在线查找状态定位分区,确定对应分区最优控制向量,进而有效控制HM-AS系统的垂向振动。
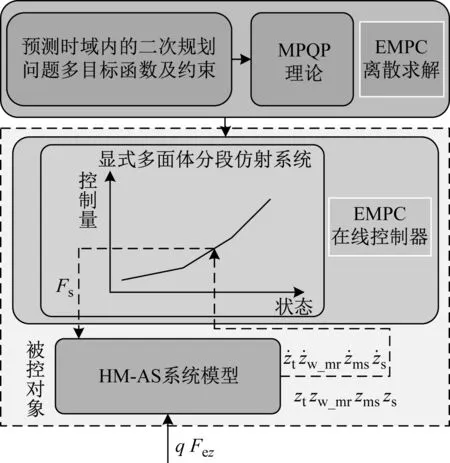
图5 EMPC HM-AS系统控制框图Fig.5 EMPC HM-AS system control block diagram
当给定状态变量x(k)时,在每个采样时刻,隐式MPC在线求解二次规划(quadratic programming, QP)问题,而EMPC离线求解给定x(j)中所有x(k)值的QP。隐式MPC和EMPC的解是等价的,因此EMPC保留了MPC解的特性。由式(13)导出MPC的解可以用分段仿射函数的形式得到,表示为
(13)
式中:x(k)为状态变量;矩阵Fi和向量gi分别为固定反馈增益和位移常数。
当前状态x(k)为每个多面体x(j)的一部分,并且这些集合组成状态空间中的多面体分区,即x(j)=X1,X2…XN。多面体集x(j)用半空间的交点表示为
x(j)={x(k)∈Rn|S1x≤S2}
(14)
利用MPQP理论对EMPC离线计算实现状态变量凸划分,经过MATLAB求解,得到117个凸参数分区。图6为参数分区截面图及其局部放大图,其中图6(a)为在其它维度参数值为零时,状态变量车轮与转子垂向速度、车轮与转子垂向位移两个维度的截面图,图6 (b) 为其它维度参数值为零时,状态变量车轮与转子垂向速度、车身垂向速度两个维度的截面图,图6(c) 为其它维度参数值为零时,状态变量车轮与转子垂向位移、车身垂向位移两个维度的截面图。由图6可以看出截面分区关于原点对称,且多面体在零附近区域相对比较集中,满足控制要求。
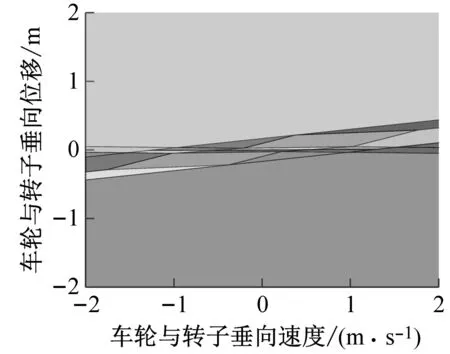



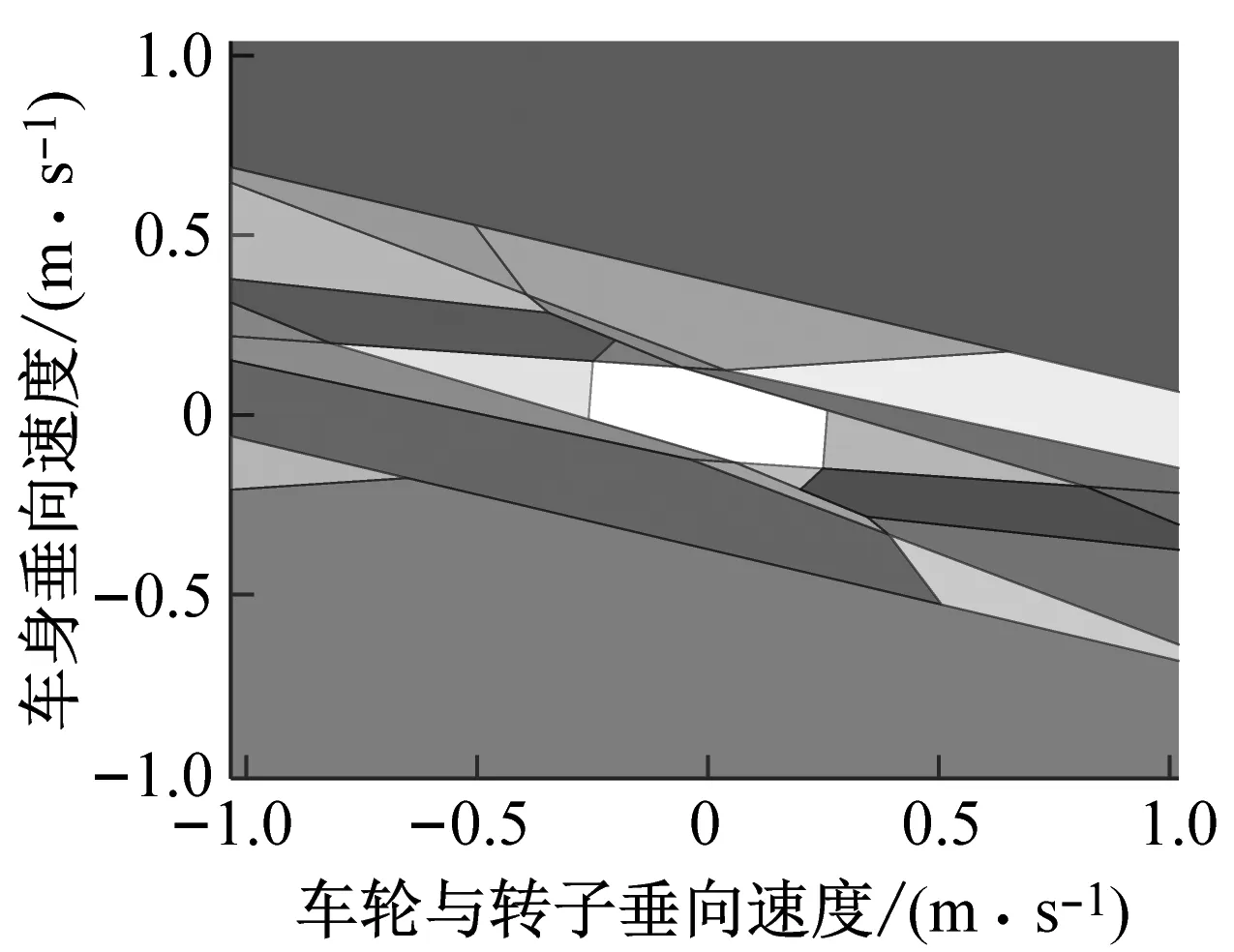


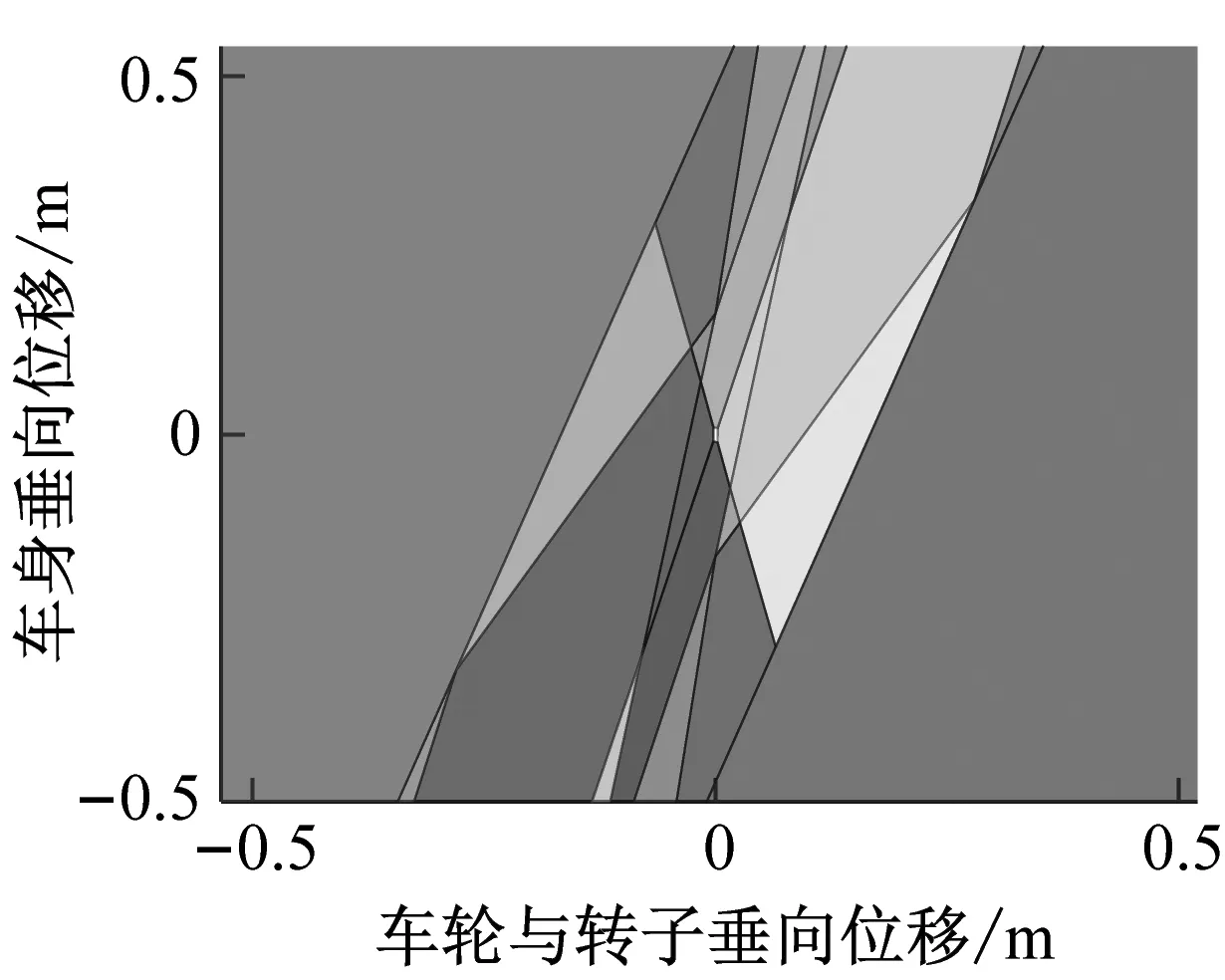

图6 参数分区截面图Fig.6 Parameter partition sections
经过上述求解,得到状态参数的所有分区,以及对应分区上最优控制量与初始状态的显式函数关系,建立显式多面体PPWA系统,通过在线搜索,进一步快速有效的根据当前定位分区和PPWA系统实现系统最优控制。
3 仿真结果分析
为评价HM-AS系统的控制性能,将本文所提EMPC控制方法与被动悬架、运用天棚控制策略的主动悬架进行对比,由于系统中引入了轮毂电机,其高频振动会影响系统的振动特性,因此,选取车身垂向加速度、轮胎动载荷和轮毂电机偏心距作为评价指标,并通过仿真试验验证所提EMPC控制方法的有效性。在EMPC控制器中将预测时域设置为10,控制时域设置为2,采样时刻设置为0.05 s,通过对不同加权参数的EMPC控制器进行反复性能比较,得到了满意的控制效果。
3.1 时域分析
分别对车身垂向加速度、轮胎动载荷和轮毂电机偏心距进行分析,仿真结果如图7所示。HM-AS系统性能均方根值对比,如表1所示。
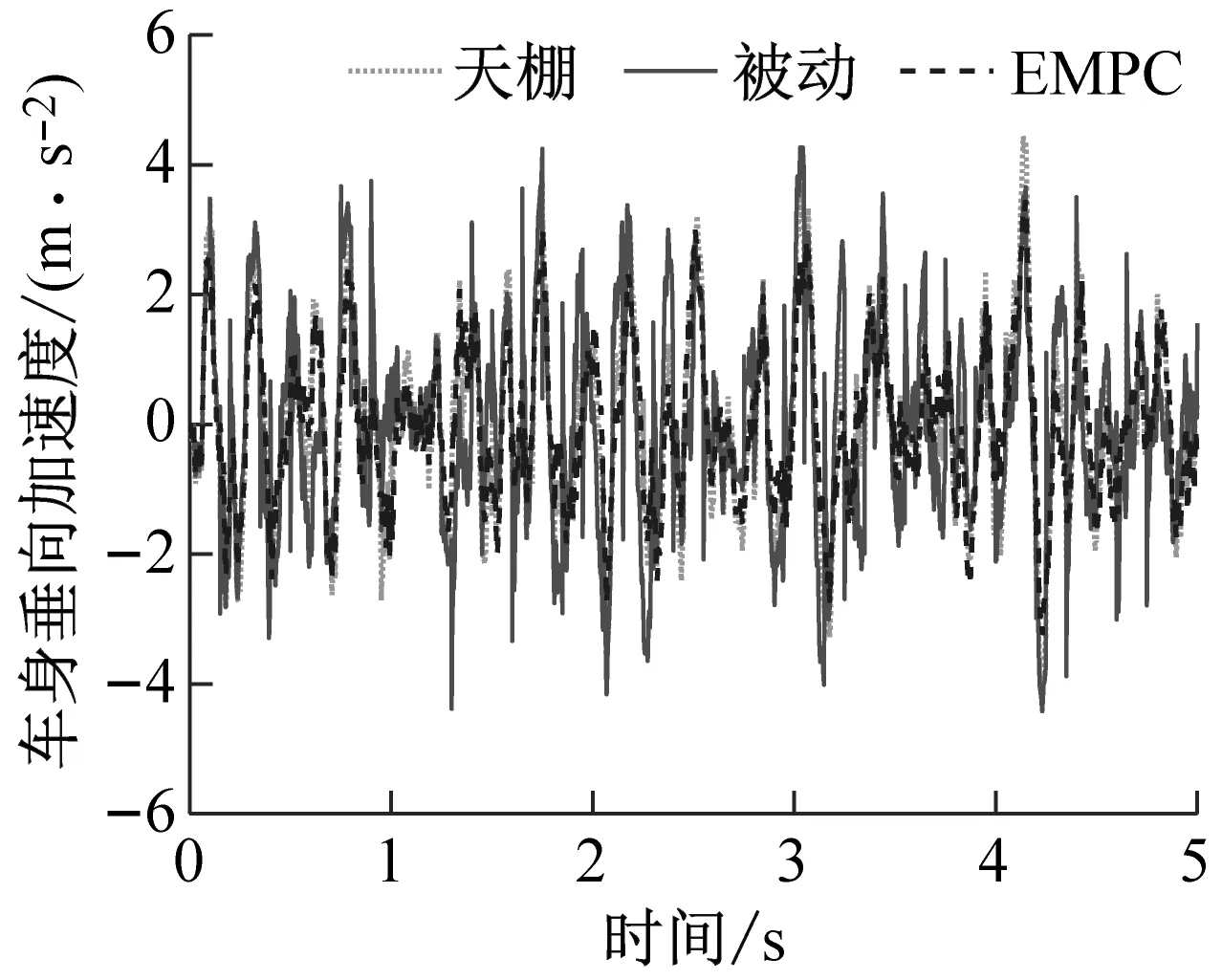
(a) 车身垂向加速度
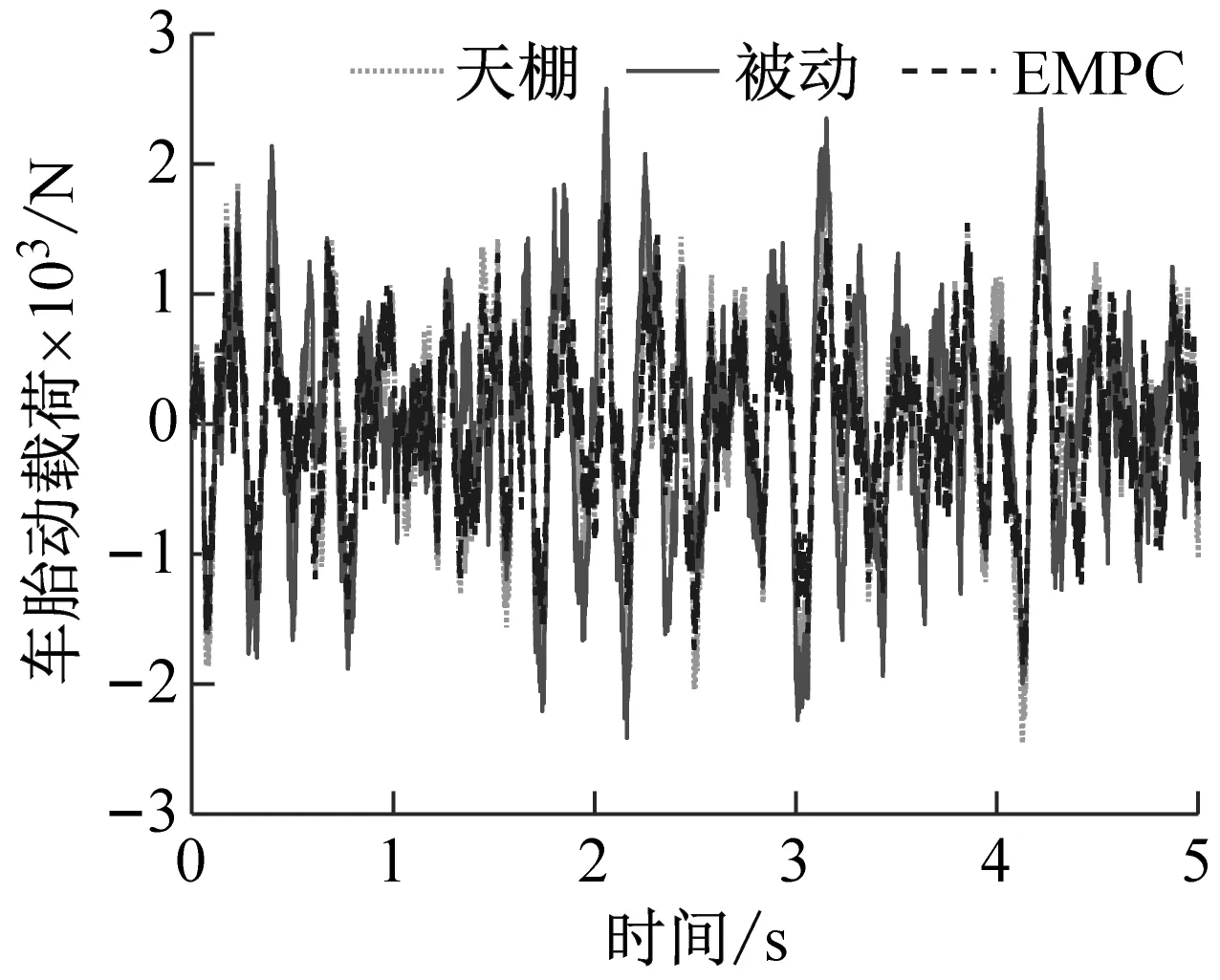
(b) 轮胎动载荷
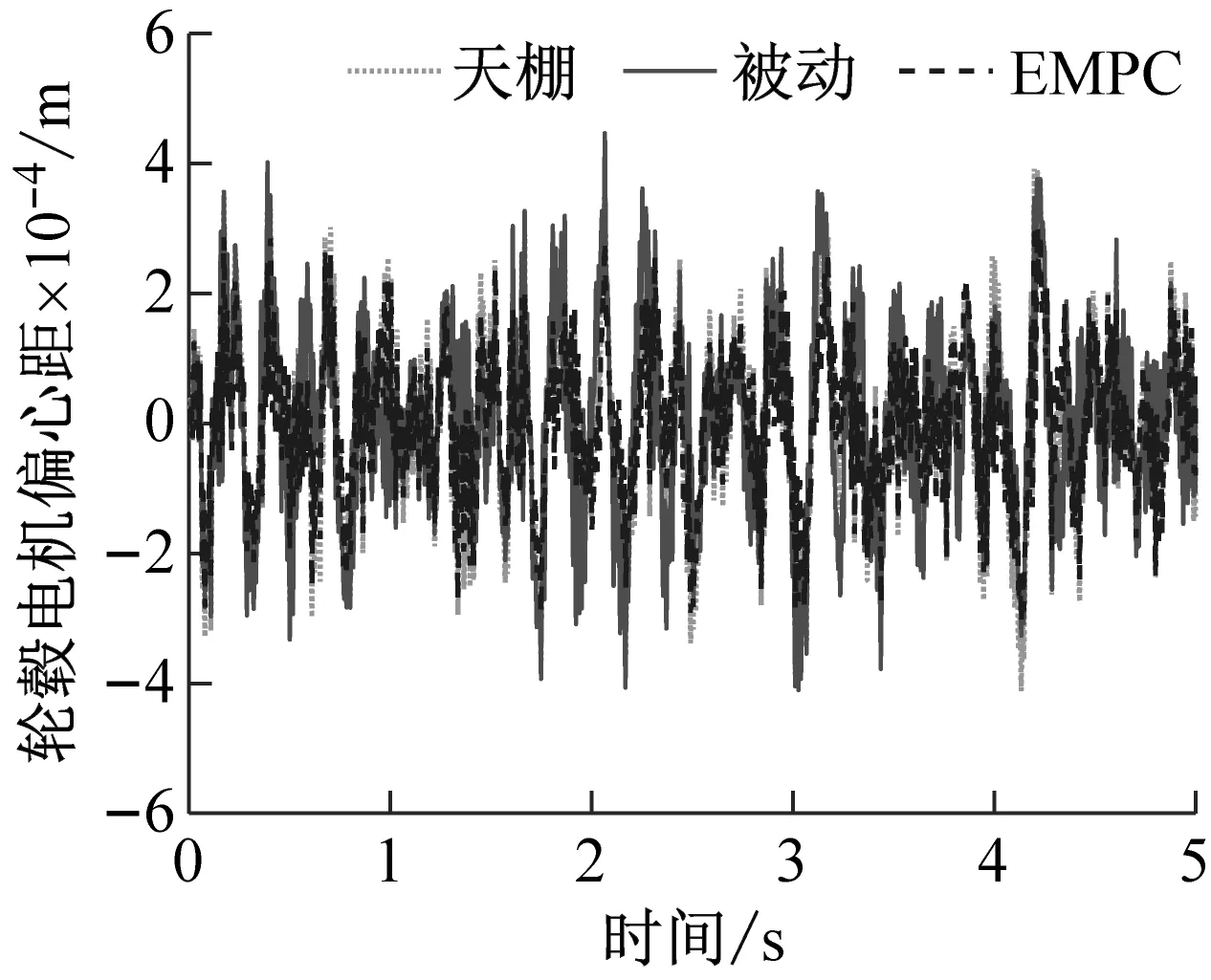
(c) 轮毂电机偏心距图7 EMPC控制效果对比Fig.7 EMPC control effect comparison
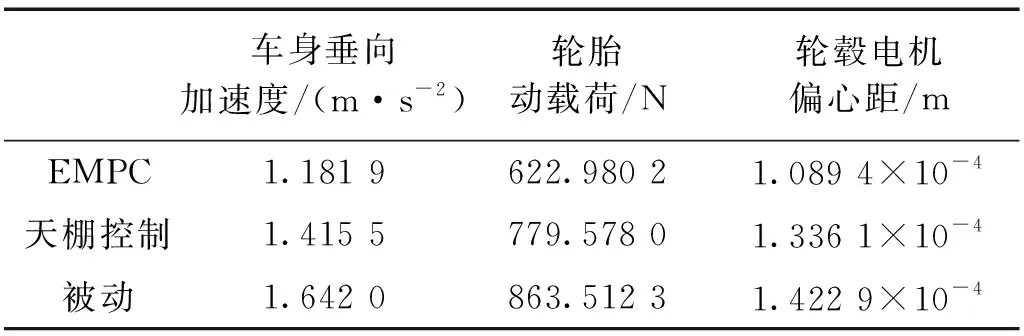
表1 HM-AS系统性能均方根值对比Tab.1 Comparison of root mean square values of HM-AS system performance
从图7和表1中可知,HM-AS系统通过显式模型预测控制,降低了车身垂向加速度、轮胎动载荷和轮毂电机偏心距的RMS值,相较于被动悬架分别降低了28.02%、27.85%和23.44% ,相较于运用天棚控制策略的主动悬架分别降低了16.50%、20.09%和18.46%。因此,所提EMPC控制方法改善了车辆行驶平顺性、操纵稳定性和轮毂电机性能,验证了所提控制方法的有效性。
3.2 频域分析
为进一步验证所提EMPC控制方法的性能,通过仿真试验对车身垂向加速度、轮胎动载荷和轮毂电机偏心距进行频域分析,仿真结果如图8所示。

(a) 车身垂向加速度频域响应

(b) 轮胎动载荷频域响应

(c) 轮毂电机偏心距频域响应图8 EMPC控制效果功率谱密度对比Fig.8 Comparison of power spectral density of EMPC
从图8中可知,采用本文所提EMPC控制方法的HM-AS系统,车身垂向加速度和轮毂电机偏心距功率谱密度在低高频均低于被动悬架和运用天棚控制策略的主动悬架的功率谱密度,能够有效改善车身垂向加速度和轮毂电机偏心距,明显提升行驶舒适性、平顺性和轮毂电机性能;轮胎动载荷功率谱密度在中低频均低于被动悬架和运用天棚控制策略的主动悬架的功率谱密度,在一定程度上提升了操纵稳定性。验证了所提EMPC控制方法的有效性。
4 结 论
本文分析轮毂电机、空气悬架和车轮间的作用机理,建立了四自由度HM-AS系统模型。基于多参数二次规划理论,以改善车身垂向加速度、轮胎动载荷和轮毂电机偏心距为目标,提出一种基于系统模型的主动悬架EMPC控制策略,将MPC反复在线计算的闭环系统转化为对应的PPWA系统,离散计算获得车身垂向速度、车身垂向位移等状态变量间的最优控制律,并依据分区的显式最优控制律实现HM-AS系统的最优控制,显著提升了HM-AS系统的实时性。通过仿真分析,所提出的显式模型预测控制方法显著提升了车辆主动悬架的性能:在时域内,有效减小车身垂向加速度、降低车轮动载荷和轮毂电机偏心距;在频域内,有效降低车身垂向加速度、车轮动载荷和轮毂电机偏心距的功率谱密度,充分改善了车辆行驶平顺性、操纵稳定性和轮毂电机性能,仿真分析验证了所提EMPC控制方法的有效性。