垂直举升排水车多模式切换控制系统设计
2022-06-16段蒙蒙汉京勇魏广娟
段蒙蒙 , 汉京勇 , 魏广娟
(1.徐州工程机械集团有限公司,江苏 徐州 221004;2.江苏徐工工程机械研究院有限公司,江苏 徐州 221004)
随着社会经济的快速发展和人类活动的日益增强,近年来城市洪涝灾害问题日益凸显。我国的救援排水装备虽然取得了长足的进步,但仍然存在设备操作复杂繁琐、救援设备准备时间长、智能化程度低等问题。
垂直举升排水车适用于立交桥、深井等地点的积水排除,在抢险救援、积水排除等方面发挥着不可或缺的作用[1]。本文设计了基于多模式切换的垂直举升排水车智能控制系统,该系统操作简单方便、救援准备时间短,改善了垂直举升排水车工作装置的控制精度和智能化水平。
1 垂直举升排水车的结构组成及控制现状
垂直举升排水车的主要结构由专用底盘、支腿机构、绞盘机构、臂架机构以及位于臂架上的伸缩水管组成。该车的主要功能是采用位于伸缩水管底部的潜水泵将立交桥、深井等地方的积水排除。现有产品水泵由主泵驱动,臂架、支腿和卷盘都由辅泵驱动。每次作业需要辅泵先取力,整车布放完成后,关闭辅泵,发动机熄火再进行主泵取力,开机工作需要17步,操作繁琐。控制箱采用按钮操作,操作界面约有30多个按键,查找不便。臂架部分动作采用开关量调节,微调效果比较差。水泵开机升速采用人工缓慢调节旋钮实现。普遍存在功能单一,调运不灵活,不能迅速投入工作状态[2]。所以,开发一种功能全面、反应迅速、智能化程度高的排水车迫在眉睫。
2 垂直举升排水车控制系统的组成
垂直举升排水车电控系统的组成图如图1所示,主要由IMC T4775D控制器、底盘控制器、电液比例阀、电子手柄、操作按钮、急停按钮、无线遥控器、各类传感器以及ICP6600显示器组成。其中,控制器主要接收发动机、电子手柄、按钮、温度、压力、速度等各类传感器的输入信号,经过控制器逻辑分析与计算后,输出相关的控制信息,对发动机、液压泵、液压控制阀等执行元件进行控制,进而达到控制整车工作装置的目的。ICP6600显示器用来监测车体各装置的工作状态,例如车体倾斜角度、臂架回转角度、液压油温度、工作模式、发动机转速、液压油流量等多项工作参数。当工作装置的运行参数处于故障状态时,显示器会发出声光报警以及警示信息,通过人机界面和完善的故障监测功能,实现快速检修。

图1 垂直举升排水车电控系统组成图
垂直举升排水车控制系统的核心是威卡IMC T4775D控制器。该控制器适用于大多数复杂工况,采用32位的Tricore高速处理器,时钟频率可达300M,程序响应速度快。该控制器有122个IO端口,4通道CAN通讯,外部输出端口以及电缆等,可对各种故障类型进行快速、准确的判断,便于检查端口故障,提高维修效率与成本[3]。
垂直举升排水车工作装置状态智能监控方案采用的是威卡ICP6600系列的7寸TFT液晶屏,该显示器采用flash开发工具,分辨率为800RGBx480,采用两路CAN总线与外界进行通讯。
垂直举升排水车控制系统采用近地与远程遥控的控制方案,以便操作人员在危险区域外控制工作装置,不仅改善操作人员作业的舒适度,并且提高了系统的可靠性,满足了整机工作流程的智能化需求。不论处于近地操作还是遥控操作,整车电控系统设计了四种工作模式(如表1所示),分别为支腿模式、卷盘模式、臂架模式、水泵模式,垂直举升排水车工作装置功能的实现是采用五个单轴比例电子手柄来控制左/右支腿升降、卷盘收放、卷盘平台收放、转台旋转、变幅升降、平台平移伸出缩回、外管架收放、内管架收放、发动机油门以及水泵转速调节等动作。在不同的工作模式下,电子手柄控制不同的工作装置。

表1 各工作模式下电子手柄功能定义
3 垂直举升排水车控制系统功能的实现
垂直举升排水车遥控器的操作界面如图2所示。本文通过对遥控器操作界面的详细说明,来阐述垂直举升排水车各工作装置功能的实现过程。
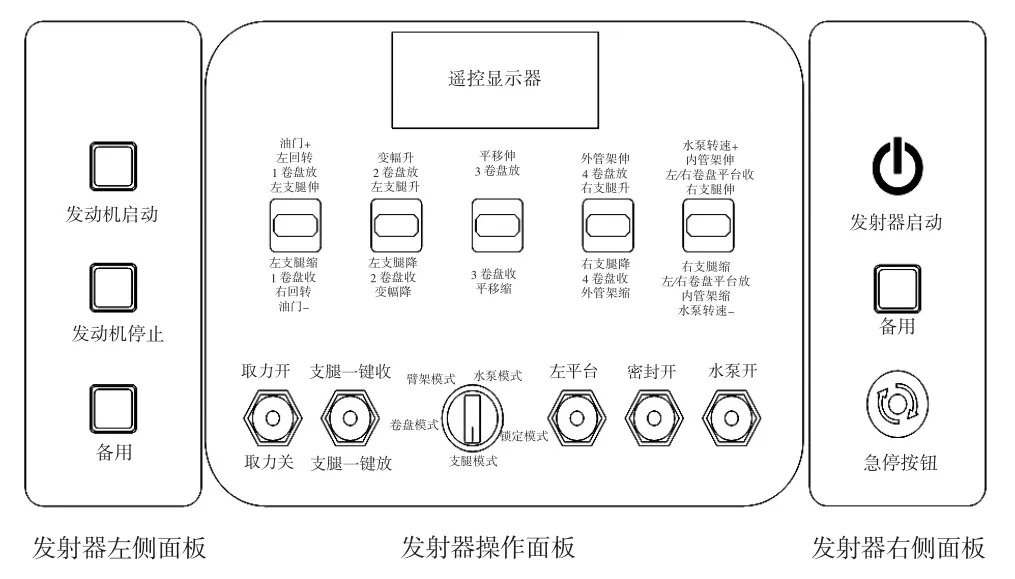
图2 垂直举升排水车遥控器操作界面
在各工作装置操作前,首先应对变量液压泵进行取力,按下发动机启动按钮,发动机在怠速模式下运行,拨动取力开钮子开关后,变量液压泵完成取力工作。
支腿机构的控制主要包括左/右支腿油缸的伸出、缩回、上升、下降以及支腿的调平工作。首先在遥控器上将模式选择开关拨到支腿模式,发动机转速与液压泵流量根据控制逻辑自动调节到此模式下最佳的参数值,然后通过电子手柄可以操作左/右支腿动作。所有支腿的收回、放出与调平也可通过支腿一键收/放按钮来完成。
卷盘机构的控制主要包括左/右卷盘平台的收放、1卷盘的收放、2卷盘的收放、3卷盘的收放、4卷盘的收放。当模式选择开关拨到卷盘模式时,首先选择左平台或右平台使能开关,操作电子手柄使卷盘平台放出,然后根据需要操作卷盘放出水带。
臂架机构的控制主要包括回转平台的旋转、变幅机构的升降、平移机构的伸缩、外管架的伸缩、内管架的伸缩。当模式选择开关拨到臂架模式时,控制变幅升摇杆将臂架升起,使臂架举升至回转不发生干涉情况下,控制右回转或左回转摇杆调节臂架与车身合适角度,调节变幅升、平移伸、平移缩、外管架伸和内管架伸摇杆功能,使水泵浸没在抽排水液面内。
水泵的控制主要包括发动机油门的增减以及水泵转速的增减。当模式选择开关拨到水泵模式时,首先按下水密封开启,再打开水泵开按钮,根据现场需求通过电子手柄调节发动机与水泵的工作转速,直到满足扬程和流量使用要求为止。
此外,为了防止操作人员误碰电子手柄,该技术方案设计了锁定模式。锁定模式不改变其他模式的参数和正在进行的动作,但它抑制除应急停止按钮以外的任何按钮的输入。
在本地控制箱上,其控制方案与遥控操作的功能相同。当按下控制箱显示器上的工作模式选择按钮后,显示器会切换到相应工作模式的界面,作为人机交互的主要通道,操作人员可以直观地看到发动机转速、水泵转速以及各工作模式下的工作状态参数,实时了解各工作装置的运行情况以及车辆的故障报警信息,以便操作人员对整车工作装置进行操作、调试与维护。
4 垂直举升排水车控制系统在CAN总线中的应用
CAN总线是国际上应用最广泛的现场总线之一[4]。CAN总线是一种多主控的总线系统,并被广泛应用于工业自动化、船舶、工业设备、医疗设备等方面。CAN总线有以下特点:
(1)可以多主方式工作,网络上任意一个节点均可以在任意时刻主动地向网络上的其他节点发送信息,而不分主从,通讯方式灵活。
(2)网络上的节点可分为不同的优先级,可以满足不同的实时要求。
(3)采用非破坏性仲裁总结结构机制,当两个节点同时向网络上传送信息时,优先级低的节点主动停止数据发送。
(4)可以点对点、一点对多点或全局广播传送方式接收数据。
(5)直线通讯距离最远可达10km。
(6)通讯速率最高可达1MB/s。
(7)每帧信息都有CRC校验及其他检错措施,数据错误率极低。
(8)节点在错误严重的情况下,具有自动关闭总线的功能,切断它与总线的联系,以使总线上的其他操作不受影响。
垂直举升排水车的CAN总线网络如图3所示。该CAN总线网络主要由底盘控制器、IMC T4775D控制器、无线遥控接收器、显示器、物联网终端、倾角传感器组成,通过CAN网络,各节点部件之间相互通讯,共同实现垂直举升排水车智能控制系统以及整车的状态监控功能。
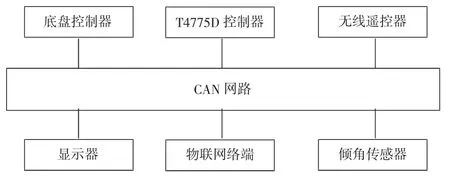
图3 垂直举升排水车控制系统总线网络
5 结论
为了进一步提高现有垂直举升排水车控制系统的性能,本文提出了基于多模式切换的垂直举升排水车智控控制系统,在不同的工作模式下,系统所对应发动机的转速与液压泵的流量各不相同,从而使各工作装置工作在最佳状态下。通过将CAN总线应用于垂直举升排水车控制系统,使得整车的状态监控更加智能,维护保养更简单更方便。