基于外转子PMSM的直驱起升机构控制系统设计
2022-06-16向斌许名熠
向斌,许名熠
(1.江西工埠机械有限责任公司,江西 宜春 331200;2.湖南安全技术职业学院防灾与救援学院,湖南 长沙 410151)
现代工业生产吊装、物流转运都需要大量的工业起重机,包括各类桥式起重机、港口起重机、集装箱起重机、造船门式起重机等等[1],其作业安全及工作效率直接关系到企业的经济效益。其中的起升机构是起重机最重要的部件,其技术数据决定了起重机的性能优劣及安全性。传统的起重机的起升机构由电动机、联轴器、传动轴、减速机、卷筒等组成[2](见图1)。传动系统结构复杂,存在传动环节长、断齿、漏油、噪音大等多个难以解决的问题[3],并存在断轴、制动器失效后的失速等安全隐患。
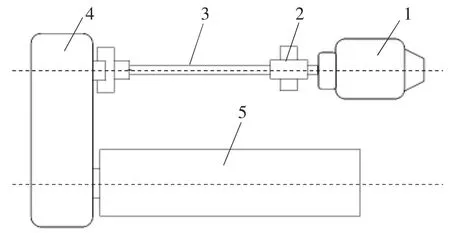
图1 传统平行式起升机构结构图
基于一种新型的无齿轮传动装置[4],结合外转子永磁电机的结构,利用其低速、大扭矩的特点,设计了基于外转子永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)的直驱起升机构控制系统。
1 直驱式PMSM起升机构结构形式
直驱式PMSM起升装置取消了减速机、联轴器和补偿轴等,实现了起重机起升机构的简化及轻量化,缩短了传统起重机力的传递路线,避免传动环节可能出现的断齿、漏油、断轴、噪音大问题。其外形结构如图2所示,PMSM的外转子(永磁体)部分与起重机的卷筒合二为一,内部是永磁同步电动机的定子(线圈),卷筒作为PMSM的外转子带动钢丝绳低速运行,实现起重机的起升动作[5]。

图2 外转子PMSG结构
2 直驱式PMSM起升控制系统设计
2.1 直驱式PMSM起升控制系统结构
起升控制系统实现对PMSM及相关辅助设备控制,并实现对外部的安全性采集处理[6]。PMSM电机的驱动采用永磁同步驱动变频器进行速度及转矩的控制。可编程控制器(Programmable Logic Controller,PLC)做为主要的逻辑控制部件,采集外部操作指令、限位开关、电机温度等信号,经PLC内部逻辑运算及故障检测处理后,PLC输出档位信号、起升制动器开闭闸信号、起升短路接触器控制信号、故障报警信号、系统启动及急停信号等,实现对起升系统的控制。
2.2 基于旋转变压器转子位置检测的PMSM矢量变频控制设计
PMSM起升控制系统采用旋转变压器作为PMSM的转子位置检测,实现PMSM矢量控制。图3为PMSM转子磁场定向的矢量控制系统原理框图。PMSM矢量变频控制是由电流内环、转速外环组成的双闭环控制结构[7]。两相d,q坐标系与转子磁链同步旋转,如果d轴在转子磁链方向,则转子磁链与转矩分别由定子电流的励磁分量isd和转矩分量isq单独控制,由此实现对转矩与转子磁链的解耦控制。通过旋转变压器检测到PMSM外转子的实际转速,并与给定转速nref进行比较,实现转速环的控制,同时利用转速与转矩之间的关系,通过速度PI控制器得到定子电流ia,ib的参考输入给定isqref和isdref。通过相电流检测电路提取ia和ib,再通过Clark变换将它们转换到定子两相坐标系中,然后使用Park变换,将它们转换到d,q旋转坐标系中,将d,q坐标系中的电流信号与isqref和isdref相比较,设定isdref=0,通过PI控制器计算的控制量。控制信号再通过Park逆变换送到三相逆变器,从而得到控制定子三相对称绕组的实际电流。速度外环产生定子电流的参考值,电流内环得到实际控制信号,从而构成速度矢量双闭环控制系统。

图3 PMSM转子磁场定向的矢量控制原理图
2.3 PMSM变频控制起升控制系统原理图
基于直驱式PMSM起升控制系统的结构,设计了电气原理图如图4所示。主动力部分包括变频器及电磁制动器由主电源供电。控制信号包括操作台的信号给定输入、限位器、安全保护、超载信号、变频器故障反馈、制动器故障、电机超温保护及其他状态反馈等信号。核心控制器PLC接收外部的输入信号,同时经过逻辑处理后控制变频器的档位,以及故障复位、制动器状态。电磁制动器的开闭动作由变频器直接控制。电动机转子安装旋转变压器进行位置检测,反馈PMSM的实时转速信号,信号由变频器的扩展卡接收,提供给变频器的内部速度闭环矢量算法。变频器外接制动单元,实现能耗制动。

图4 PMSM起升控制原理图
3 直驱式PMSM起升控制系统测试及应用
结合桥式起重机工程应用项目实际情况,设计一台外转子PMSM,其设计参数见表1。
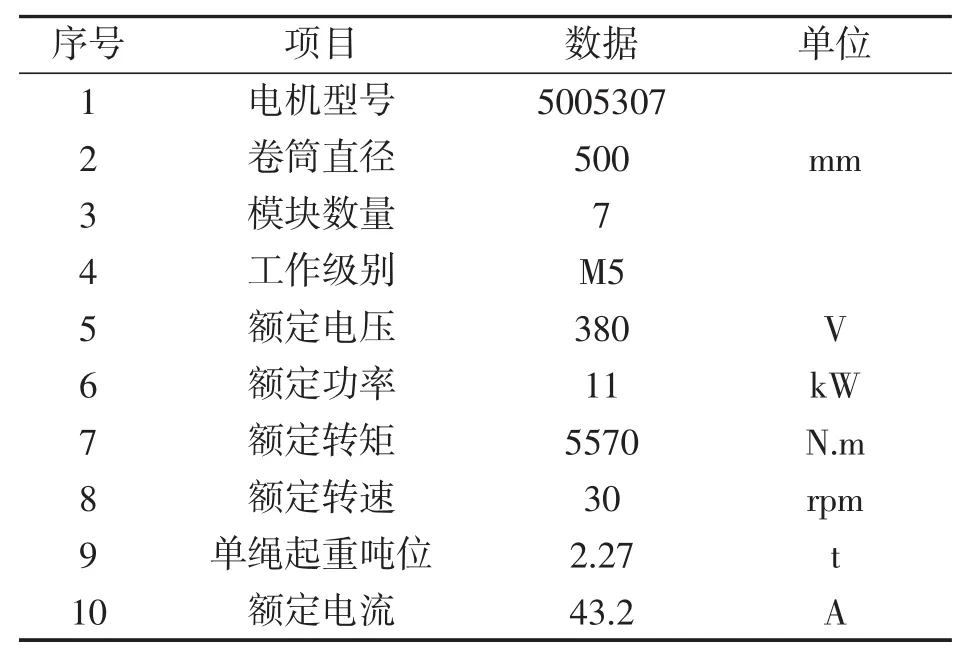
表1 5005307型PMSM参数
在实验台架上进行测试,记录在不同负载的时候的电流及电压值,检测该直驱式PMSM性能及控制效果,是否满足设计的要求。
实验台如图5所示。将测试电机安装固定在台架上,缠绕单根钢丝绳,准备不同重量的砝码,进行不同载荷下的吊载实验。用多功能万用表记录不同载荷(空载、半载、满载)不同转速下重物向上提升时的PMSM电压及电流值(见表2)。由数据可以看出PMSM在双闭环矢量空载方式下,电机运行满足设计的要求,不同载荷下运行电流稳定,电流随负载的增加而增大,电压随转速的提高而增大,在满载的情况下,还有一定的裕量,可以满足现场重载情况下载荷冲击要求,保证起升机构安全稳定运行。

图5 直驱式PMSM起升性能测试台

表2 5005307型PMSM不同载荷测试数据
该台PMSM起升机构安装在某造纸厂QD5+5t桥式起重机上(见图6),设备运行正常,满足使用工况要求。
4 结论
外转子PMSM直驱起升机构控制系统实现了起重机新型无齿轮传动装置的控制功能。在起重机应用特点的基础上,结合先进的双闭环的矢量控制技术,完成了系统结构、电气原理图的设计,并在实验台架上进行了直驱式PMSM起升机构完整测试,分析了在不同载荷不同转速下的电压、电流数据,证明了该控制系统能够满足起重机起升机构的控制要求,实现了设计的各种功能,并成功应用在QD5+5t桥式起重机现场使用工作中,满足了起重设备的工况要求。

图6 QD5+5t桥式起重机起升机构
