基于Prescan 的车道偏离预警系统研究*
2022-06-16马宏伟吴长水
马宏伟 吴长水
(上海工程技术大学机械与汽车工程学院 上海 201620)
1 引言
车道偏离预警系统是组成高级辅助驾驶系统的重要一部分,信息采集模块通车载摄像头传感器才采集车辆与车道线的相对位置关系,决策模块对传感器采集的信息进行分析,进而判断车辆的横向偏移量是否处于正常范围内,如果车辆的横向偏移量超出了预先设定偏离阈值,控制模块则向驾驶员发出警告[1~2]。
目前,国内外对车道偏离预警算法的研究有很多,大致分为时间算法模型和空间算法模型。时间算法模型包括车辆跨道时间模型(TLC 模型)[3]等,空间算法模型包括车辆相对位置模型(CCP 模型)[4~5]和未来偏移量模型(FOD 模型)[6]等,不同的算法模型都有其特点。
本文在研究基于CCP 模型车道偏离预警算法的基础上,基于Matlab/Simulink 和Prescan 软件分别搭建控制算法模型和交通测试场景模型,最终在Matlab/Simulink环境下进行联合仿真,并对设计的车道偏离预警算法在不同的车道偏离阈值下进行验证分析。
2 车道偏离预警算法
2.1 CCP模型基本原理
本文车道偏离预警算法采用基于CCP 算法模型。如图1 所示,该模型充分考虑了车辆与车道边界线的实际位置关系,并假设车辆行驶过程中车辆与车道边界线处于平行状态,如果车辆到车道边界线的距离小于设定偏离阈值(车道边界线和报警边界线的距离),则报警系统提示驾驶员车辆有偏离车道的危险[7~8]。该模型以车辆在当前道路的实际距离作为评价标准,具有一定实际意义。
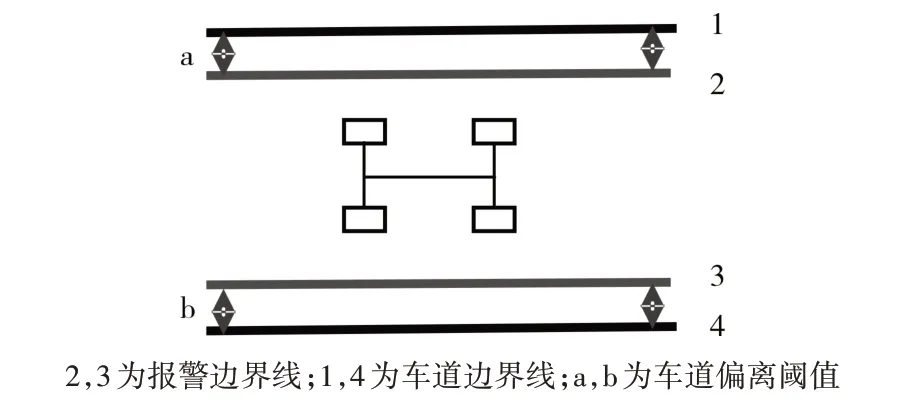
图1 车道偏离报警示意图
本文规定车辆偏航角小于零为向左偏离,大于零向右偏离。车辆左偏分为两种情况:车辆左前角到左侧车道边界线距离小于给定偏离阈值,并且车辆偏航角为负,或者车辆左前角到左侧车道边界线距离小于给定偏离阈值,并且车辆偏航角大于零且小于偏航角阈值,即可判断车辆向左偏离。车辆右偏也分为两种情况:车辆右前角到右侧车道边界线距离小于给定偏离阈值,并且车辆偏航角为正,或者车辆右前角到右侧车道边界线距离小于给定偏离阈值,并且车辆偏航角小于零且大于偏航角阈值的相反数,即可判断车辆向右偏离。车道偏离预警算法的数学模型如下所示。
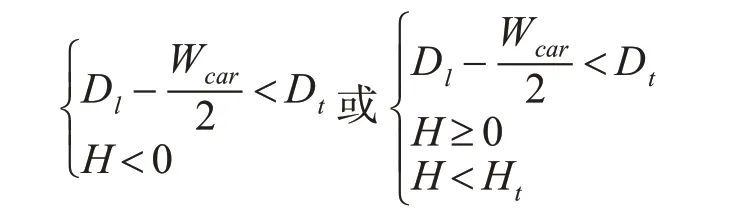
车辆向左偏离算法:
车辆向右偏离算法:
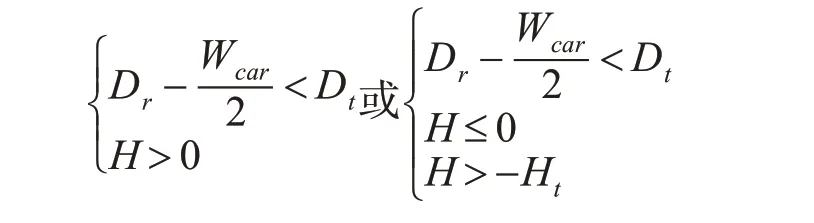
其中,Dl为车辆和左车道边界线的距离;Dr为车辆和右车道边界线的距离;Dt为车辆到车道边界线偏离阈值;H为车辆偏航角;Ht为车辆偏航角设定阈值;Wcar为车身宽度。
2.2 Simulink环境下CCP模型建模
CCP 模型车道偏离预警算法的核心是如何准确地检测车辆的左右横向偏移量[9~10]。Prescan 软件中的Lane Sensor传感器模型可以检测道路曲率、车辆到车道边界线的横向距离等信息。在Matlab/Simulink 环境下进行车道偏离预警算法设计时,只需使用BUS-Selector 模块进行自定义,调用传感器模块输出信号即可。
车道偏离预警算法主要由车道偏离判断模块和偏航角计算模块组成,如图2 所示。车道偏离判断模块主要采用Matlab-S-Function 模块自定义编程封装在相应的模块内,该模块有六个输入信号,分别为车身宽度、车道偏离阈值、偏航角、偏航角阈值、车辆到车道左右边界线的偏移量;两个输出信号,分别为车辆左右偏离检测输出信号。偏航角计算模块主要也是采用Matlab-S-Function 模块进行Matlab 语言编程实现,该模块有八个输入信号,分别为车辆在不同坐标系下的坐标,经坐标变换得到车辆在不同时刻的偏航角,该模块主要用来计算车辆在行驶过程中的偏航角,输出信号主要给车道偏离预警算法逻辑调用,以方便车道偏离预警算法模块判断车辆是否发生偏离。
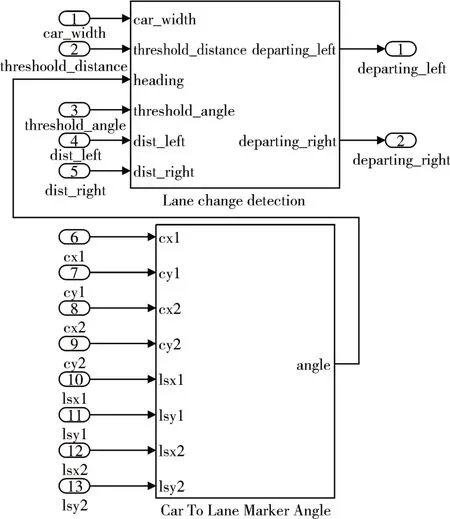
图2 车道偏离预警算法模型
3 Prescan场景搭建
Prescan 软件是西门子旗下的一款主动安全仿真软件,主要用于高级驾驶辅助和智能驾驶交通场景的开发,在图形用户界面里面可以方便地进行交通场景建模、传感器模型的设置以及车辆动力学配置,并且还可以一键导入Matlab/Simulink 中,结合搭建的控制算法形成一个集环境感知、控制算法为一体的仿真测试环境[11~12]。
本文基于Prescan 软件构建的交通测试场景,如图3 所示。首先,设置三车道StraightRoad 道路模型,车道宽3.5m,道路长120m,并在道路两旁添加树木等基础设施。其次,在配置道路模型的基础上进行车辆行驶路径配置,以方便被测车辆对象沿着预定路径行驶。然后,添加车辆测试对象,本次搭建的仿真环境中选用Audi-A8车辆模型,在仿真过程中,测试车辆沿着软件预先设定路径进行行驶。最后,添加Prescan 软件提供的车道偏离预警所使用的Lane Maker传感器模型,该传感器主要用于检测车辆与车道边界线的距离、道路曲率、偏航角等车道偏离预警算法所需要的输入信号。如图4 所示。Lane Maker 传感器模块配置完成后,可生成车道偏离预警算法所需要的Matlab/Simulink 接口,以方便车道偏离预警算法模块调用相关的输入信号。
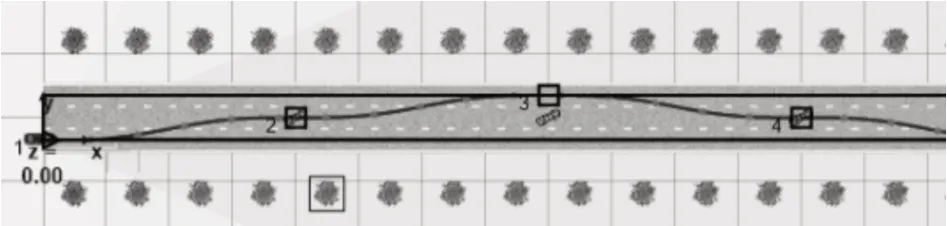
图3 测试场景模型
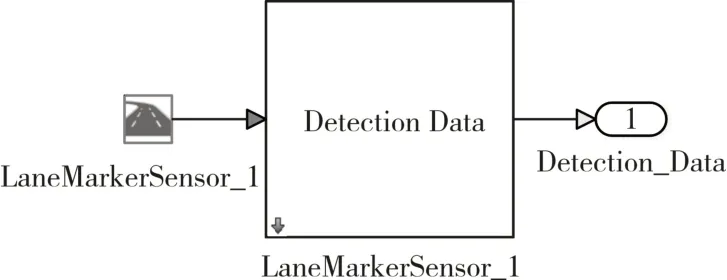
图4 Lane Maker传感器接口
4 联合仿真
4.1 联合仿真的流程
Prescan 和Matlab/simulink 联合仿真具有一套基本的流程[13~15]。首先,基于Prescan 软件搭建交通测试场景,对车辆行驶路径进行规划,配置车辆行驶参数,添加Lane Maker 传感器模块,并对传感器参数进行配置,以确保传感器处于有效的检测范围之内。
其次,基于Matlab/Simulink 搭建车道偏离预警控制算法,根据传感器模块采集道路环境信息对车辆是否偏离车道进行判断。
上述配置完成后,如图5 所示,在Matlab/Simulink 环境下进行感知模块和控制模块的集成,针对不同的车道偏离阈值对搭建的控制策略进行仿真验证。

图5 仿真模型集成图
4.2 仿真分析
本次测试中,被测车辆对象Audi-A8沿着预定路径行驶前进,根据Prescan 软件提供的Lane Maker传感器输入的道路场景信息,在保证相同的交通测试场景情况下,分别对不同车道偏离阈值进行仿真验证,车道偏离阈值设置0.5m 时,检测结果如图6(a)所示,车道偏离阈值设置为0.6m 时,检测结果如图6(b)所示。其中车辆发生偏离时,检测结果输出1,否则输出0。
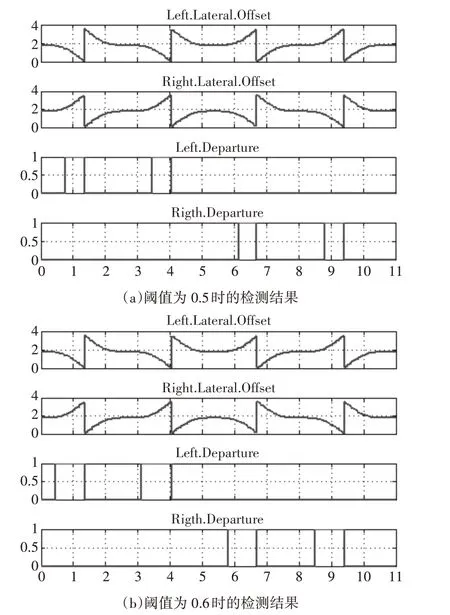
图6 车道偏离检测输出结果
由车道偏离检测结果曲线图可知,针对不同的车道偏离阈值,车道偏离预警算法都能准确地检测车辆是否发生偏移。车道偏离阈值设置为0.5m时,车道偏离预警时刻相对较晚,预警响应时间较短,驾驶员进行修正车辆的时间也较短。车道偏离阈值设置为0.6m 时,车道偏离预警时刻相对较早,预警响应时间相对较长,驾驶员进行修正车辆的时间也相对充分。该测试结果表明,对于不同的车道偏离阈值,车道偏离预警控制算法都能实现其车道偏离报警功能,该控制算法具有一定的参考价值。
5 结语
通过本文的研究对车道偏离预警系统算法和基于Prescan 软件场景开发有了更深的理解,设计的车道偏离预警算法,根据不同的车道偏离预警阈值能及时进行报警,达到了功能需求。通过Prescan 软件和Matlab/Simulink 进行联合仿真,验证了车道偏离预警算法的合理性,对智能驾驶产品的开发验证提供一种虚拟场景仿真思路。
