水下机器人在中国的早期发展
2022-06-16梁波赵宏宇王楠
梁波 赵宏宇 王楠
地球总面积约5.1亿千米2,其中海洋约3.61亿千米2,占地球表面积的71%。人类每天获取的蛋白质中有20%来自海洋,她是人类的摇篮,也是地球上大部分生物的栖息地。今天,海洋是超过90%的商品、数据与信息交流的中转站;明天,海洋对人类的生活将更加重要。2000多年前,古罗马哲学家西塞罗(M. T. Cicero)就曾说过,“谁控制了海洋,谁就控制了世界”。
那些极大改变人类社会面貌的技术革新,大多是在海上或是因航海而诞生的[1],水下机器人也是如此。它是人类认识海洋、经略海洋和开发海洋的利器,一直为世界海洋强国所关注和重视。它通过水下目标探测和识别、水下导航定位、水下通信等高技术手段,可实现水下打捞救援、水下探测、资源开采等多种任务。
人类抵近海内部进行探索已有一百多年的历史,其间,各种潜水器应运而生。早在1884年,法国科学家第一次潜入西西里岛附近的海域进行水下考察。1927年,苏联地质学家科列诺夫(M. B. Korenov)乘坐钟形潜水装置潜入45米水深处,进行观察和搜集土壤样品。1930年代,苏联生物学家采用潜水装具对渔业区进行了科学观测。同一时期,意大利、法国和美国也都进行了水下考察,美国的毕比(W. Beebe)还曾在百慕大群岛乘潜水球深潜到960米深处[2]。
1953年,美國研制出第一艘作业型潜水器。20世纪五六十年代,由于水下机器人所涉及的新技术还不够成熟,如电子设备故障率高、通信匹配差、脐带电缆绞缠,以及吊放和回收等问题没有很好解决,因此难以被市场广泛接受,发展缓慢。直至1966年,美国CURV水下机器人在西班牙沿海将失落在868米深处的氢弹打捞上来后,水下机器人才开始受到广泛重视[3]。1975年以后,由于海底石油和天然气的开发需求以及电子技术的发展,国际上水下机器人研究才显露出快速发展的苗头。但直到此时,这项工程技术在中国几乎还是一片空白。

现代意义上的水下机器人历史不过七十年左右,经历了从载人到无人,从直接操作、遥控、自主到混合几个阶段。加拿大国际潜水器工程公司(ISE)总裁麦克法兰(J. R. McFarlane)认为,水下机器人经历了四次革命:第一次革命出现在1960年代,以潜水员潜水和载人潜水器的应用为主要标志;第二次革命出现在1970年代,以遥控水下机器人迅速发展成为一个产业为标志;第三次革命发生在1990年代,以自主水下机器人走向成熟为标志;第四次革命发生在21世纪,水下机器人进入了各种类型混合的发展阶段[4]。中国的情况大致与国外类似,但所用时间更短。
中国水下机器人研究究竟始于何时,目前在业内尚未达成统一的共识,普遍认为“起步于1980年代或1970年代末期”。
中国科学院有着集多科学、先进技术知识、尖端科技人才、完善的科研中心与基地、广泛的国际科技合作、活跃的学术环境为一体的优势,因势利导,在国内最先重视水下机器人的研究与开发,中国科学院沈阳自动化研究所(简称沈阳自动化所)则是国内最早开展机器人研究的单位。
1972年10月,在中国科学院于沈阳召开的“电子·自动化科研工作座谈会”上,确定“以控制机系统研究为主,同时开展……人造智力系统的探索”[5],这是沈阳自动化所最早给出的与机器人相关的表述。1973年12月,沈阳自动化所官方资料首次使用了“机器人”一词,该所制订的《1974—1980年科研规划》提出,“人造智力的研究与应用,是自动化发展的趋向”“人造智力是近十几年发展起来的自动化领域内的新学科,它是人赋予机器有模拟人类某些智力行为的自动化系统”[6],将“智力机器人的研究”作为人造智力方向拟开展的八项研究课题之一,并把“智力机应用于海底开采的探索研究”作为“待定”任务。该所还同时提出与“水下机器人”相关的研究课题。
1974年5月,在向中国科学院的汇报中,沈阳自动化所首次提交“开展人工智能和机器人技术研究”的立项申请,正式提出将人工智能与机器人作为该所的学科发展方向,在国内率先开展机器人理论与应用研究。中国人工智能与机器人学领域的主要开拓者和奠基人之一蒋新松院士认为:“我国的机器人技术起步较晚,但将机器人技术作为一个专门学科介绍到国内来并不晚。大致是在七十年代初,世界范围内第一次机器人高潮的末尾。”[7]
1977年10月,中国科学院自然科学学科规划会议将机器人项目列入学科规划。同年8月,沈阳自动化所编制的《1978—1985年科研发展规划》提出,“由于深海海底开发是一个综合性的技术,它涉及很多其他学科如海洋学、深海机械、海底测量、深海信息传输等的问题,要多学科协同工作”。[8]该发展规划列出的未来八年内重点研究的八个项目中,“海底用自动机械的研制”“海底定位与姿态控制”两项直接与水下机器人相关。
1979年8月,为了落实学科规划,中国科学院成立了以蒋新松为组长的人工智能与机器人赴日考察组。考察组考察后认为,“我国需要研究机器人,在我国当时劳动力丰富的情况下,搞特种机器人容易得到用户和领导支持,特种机器人的应用将是我国机器人研发的突破口”。[9]考察组随即就如何立题进行了讨论,最后集中到两种可能的情况,“一类是核辐射下应用的机器人,另一大类就是海洋机器人”。后来就提出以第二个课题作为研究的目标,[10]水下机器人自此成为中国机器人研究的“突破口”。同年10月26日,沈阳自动化所与中国科学院长春光学精密机械研究所(简称长春光机所)联合调查组提交了《我国需要研制海洋机器人》的初步调查情况汇报[11],汇报中首次明确提出“海洋机器人”一词,而“水下机器人”一词大致是在1980年代后期开始使用并沿用至今,二者并无本质区别。不久后的12月7日至10日,中国科学院又在沈阳组织召开了“海洋机器人”计划座谈会,共有10家单位30名代表参加了会议。会议议题包括:对海洋机器人研究进行课题论证;讨论研究工作计划和分工协作方案;组织总体组;草拟开展海洋机器人研究工作报告。沈阳自动化所在会上作了“关于开展海洋智能机器人研究的设想”的报告[12],与会代表一致支持开展这一课题研究。会议做出的一项重要决定就是在1980年组织开展全国性的课题调研工作,从对水下机器人概念的理论探讨转到课题预先研究的实际行动,中国水下机器人事业的大幕由此拉开。

1980年2月,中国科学院下发《关于开展海洋机器人总体调研和预先研究工作的通知》,由沈阳自动化所和长春光机所牵头总体调研和预先研究,明确指出“海洋机器人研究课题已列入一九八〇—八一年重点科研项目计划。……在全面开展研究工作之前,应着重抓好总体调研、方案论证和预研工作”。[13] 4月初至5月中旬,由蒋新松带队,中国科学院所属的沈阳自动化所、长春光机所、海洋研究所、南海海洋研究所组成的联合调研组一行11人,对二十多家单位开展大规模调研,召开各类座谈会十余次,并召集海洋科学家、海军指战员、打捞人员、潜水员等参与,大家共同呼吁亟需开发新的水下探测及作业装置——水下机器人,最终形成调研报告并报送中国科学院。6月12日至14日,在沈阳自动化所召开“海洋机器人调研总结和工作讨论会”,着手考虑总体方案;16日,以密件形式向中国科学院报送了《海洋机器人调研汇报和工作讨论会简报》。与会者认为,“在我国进行海洋机器人研究,一是需要,二是可能”,会议预定“年底拿出初步方案,拟在年底召开审议会”。[14]
1980年9月28日,沈阳自动化所在报送给中国科学院的《1981—1990十年科研发展规划》中提出:“五年内完成第一代能在大陆架海底进行观察和简单操作的有缆游式海洋机器人;逐步开展第二代监控式海洋机器人单项技术的预研工作。十年内完成能自行回避障碍的监控式第二代机器人,并投入使用。为此,……开展和完成海洋机器人水下观测电视系统,水下图像处理和物景分析,机器人感觉、滑觉、接近感觉等方面的研制工作。”[15]这些研制任务是沈阳自动化所水下机器人事业长远发展的基础。
1981年11月上旬,在沈阳友谊宾馆召开了“海洋机器人研究课题评议会”,李薰、陶亨咸、张作梅、张钟俊、杨嘉墀、常迥六位学部委员(院士)与会,一致同意立项,并根据李薰建议将课题名称定为“智能机器在海洋中的应用”。11月20日,沈阳自动化所向中国科学院提交《关于“智能机器在海洋中的应用研究”列为我院重点课题的申请报告》。
1982年8月,在杭州莫干山召开的“无人有缆可潜器方案评议会”上,代表们一致认为,近年来随着我国海上石油开发、海洋调查、海洋工程和救捞事业的发展,当前研制的无人有缆可潜器是我国海洋事业发展迫切需要的工具,对“四化”和国防建设都有重要的现实意义,应予积极支持。沈阳自动化所及时预见发展趋势,提出了相关研究课题,并主动与上海交通大学等单位合作,适应了国家的需要,与会代表对此一致给予充分的肯定。当月,“智能机器在海洋中的应用(‘HR-01’试验样机)”被列为中国科学院重点课题,获经费支持并全面开展研制。
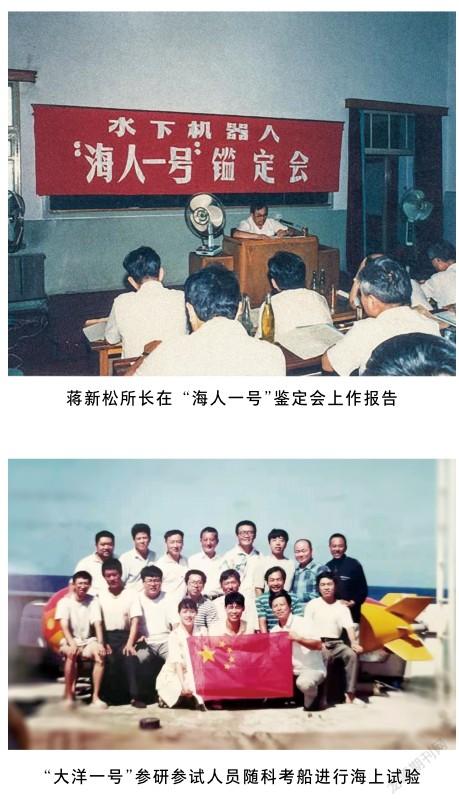
“海人一号”(HR-01)水下机器人由水面支持和机器人本体两大部分构成,主要性能指标达22项之多。水面支持部分包括供电系统、控制室、电缆绞车、声纳定位系统;机器人本体为框架式结构,便于安装其他海洋仪表,本体运动为浮游方式。经过两年多的不懈努力,“海人一号”在沈阳自动化所完成总装调试后,于1985年底至1986年初,在大连海域进行了整机功能试驗。1986年底至1987年初,它又在海南岛海域进行了测试。1987年8月,举办了“海人一号”鉴定会。会议认为,“海人一号”达到了设计指标要求,在技术上居于国内领先地位;填补了国内空白;控制系统达到了国外1980年代初期产品相应系统的水平。“海人一号”顺利通过鉴定,标志着中国自主研制的中国第一台水下机器人正式诞生。

“海人一号”的研制工作是中国科研人员完全依靠自主技术和立足于国内配套条件开展的,是中国水下机器人发展史上的一个重要里程碑。以蒋新松、封锡盛等为代表的中国第一代水下机器人专家为此做出了开创性贡献,中国水下机器人由此掀开了波澜壮阔的宏伟篇章,沈阳自动化所也因此奠定了国内水下机器人研发的领先地位。
通过对早期水下机器人领域重要事件的梳理,从概念提出、规划编制、初步调查、需求调研、预先研究、方案论证、课题申报,直到项目审批和“海人一号”研制完成,重要时间节点主要集中在1979年至1982年期间,尤以1980年开展的全国性调研及此后形成技术方案、确定任务目标和建立全国性协作网络等工作为最重要的时间节点,故认定1980年为中国水下机器人研究的起始年——元年,较为符合历史客观情况。
水下机器人是一个跨学科的研究领域,是多学科、高技术的系统集成,知识和技术密集,涉及光、机、电、声学以及自动控制、计算机、材料、腐蚀、密封、数据和图像处理、水下作业等多种技术的综合运用。因此,每种型号的水下机器人研制都需要多家单位和多领域的专家学者协作配合。水下机器人研究是一项集体性的事业,团队精神和大协作是成功的保证,在“海人一号”研究试制过程中,除牵头的沈阳自动化所外,参与研发的还有上海交通大学、中国科学院声学研究所等多家单位,这些协作单位及其科研人员所做的工作也不应被忘记。
[1]雅克阿塔利. 海洋文明小史. 王存苗, 译. 北京:中信出版社, 2020: ⅹ.
[2]亚斯特列鲍夫. 水下机器人. 关佶,等,译. 北京:海洋出版社, 1984: 1.
[3]蒋新松, 封锡盛, 王棣棠. 水下机器人. 沈阳: 辽宁科学技术出版社, 2000: 17.
[4]McFarlane J R. Tethered and untethered vehicles: the future is in the past. Mar Technol Soc J, 2009, 43: 9-12.
[5]沈阳自动化所. 中国科学院沈阳自动化研究所所志·第一卷(1958—1985). 沈阳: 沈阳自动化所, 2004: 12.
[6]沈阳自动化所. 科研规划草案第四次讨论稿. 中国科学院档案馆B105-79号档案, 1973-12-1: 4-8.
[7]蒋新松. 国外机器人的发展及我们的对策研究. 机器人, 1987(1): 58-65.
[8]沈阳自动化研究所. 中国科学院沈阳自动化研究所科研发展规划(研究方向部分). 中国科学院档案馆B105-00151-001号档案, 1977-8-16: 10.
[9]劉海波. 二十世纪七十年代的学科发展及历史意义//中国科学院沈阳自动化研究所. 中国科学院沈阳自动化研究所50周年纪念册.沈阳: 中国科学院沈阳自动化研究所, 2008: 102.
[10]蒋新松. 关于“海人一号”研制过程的总结. 沈阳自动化所综合档案室B105-KY-00030-006号档案, 1987-8-12: 1-2.
[11]沈阳自动化研究所, 长春光学精密机械研究所联合调查组.我国需要研制海洋机器人. 沈阳自动化所综合档案室B105-KY-00044-002号档案, 1979-10-26: 1-5.
[12]沈阳自动化研究所. 关于开展海洋智能机器人研究的设想. 沈阳自动化所综合档案室B105-KY-00044-003-001号档案, 1979-12-8: 1-6.
[13]中国科学院. 关于开展海洋机器人总体调研和预先研究工作的通知. 沈阳自动化所综合档案室B105-KY-00046-022号档案, 1980-2-25: 1-2.
[14]海洋机器人调研汇报和工作讨论会简报. 沈阳自动化所综合档案室B105-KY-00045-014号档案, 1980-6-16: 5-6.
[15]沈阳自动化研究所. 中国科学院沈阳自动化研究所1981-1990十年科研发展规划. 沈阳自动化所综合档案室B105-WS-00008-001号档案, 1980-9-28: 16.
关键词:水下机器人 沈阳自动化研究所 海人一号 ■
