车载毫米波雷达结构组件设计
2022-06-15张大霖荣志强宋玉河
马 涛,张大霖,荣志强,宋玉河
(1.东软睿驰汽车技术(沈阳)有限公司,辽宁 沈阳,110179;2.东软睿驰汽车技术(大连)有限公司,辽宁 大连,116601)
随着智能交通系统在全球的广泛应用,无人驾驶技术作为信息化与工业化深度融合的产物为整个汽车产业带来了颠覆性的变化。汽车逐步由代步工具演变成为特殊的移动智能终端,高级驾驶辅助系统作为无人驾驶技术的基础在全球范围得到了快速发展[1]。
汽车辅助驾驶系统日益完善,包含多种传感器,如雷达、摄像头等,车载雷达包括基于不同技术(激光、超声波、微波)的各种不同雷达。目前,毫米波车载雷达的关键技术主要由博世、奥托立夫、电装、大陆等传统汽车零部件巨头所垄断[2]。本文主要介绍市场主流毫米波雷达及其布置要求,并以一款量产的毫米波雷达结构组件设计为例,介绍了车载毫米波雷达的使用要求、设计依据及试验测试项目。
1 毫米波雷达介绍
1.1 毫米波雷达的技术原理
本文中的毫米波雷达应用于车前方碰撞警示系统,它可侦测车辆前方的物体,由先进的警示系统提醒驾驶员,降低事故发生概率。在车辆发生危险之前,雷达立刻侦测前方物体的相对速度及距离,然后蜂鸣器发出声响提醒驾驶员规避。
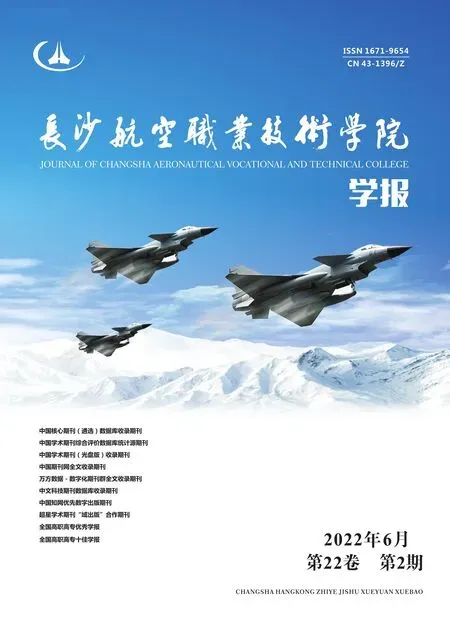
雷达由发射天线传送频率调变连续波,信号经目标物体被反射,再由接收天线接收(如图1)。由发射信号与接收信号间的时间差(Δt)与频率差(Δf),可以计算出侦测目标的角度、距离及速度信息,并生成警告信息传递给汽车控制电路,由汽车控制电路控制汽车变速器和制动器作出应对动作,从而避免发生碰撞。
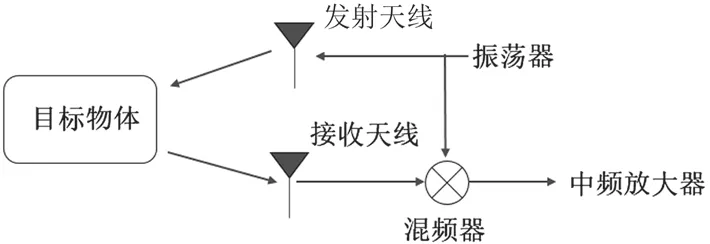
图1 雷达工作原理图
图2 雷达天线架构
毫米波雷达一般拥有三支发射天线与四支接收天线(如图2),三支发射天线中,一支侦测短距离,两支侦测长距离。这些天线可以侦测目标物的位置,且多天线可以拥有更宽广的可视角度。
毫米波雷达具有探测性能稳定、作用距离较远、环境适应性好等特点。与超声波雷达相比,毫米波雷达具有体积小、质量轻和空间分辨率高的特点。与红外、激光、摄像头等光学传感器相比,毫米波雷达穿透雾、烟、灰尘的能力强,具有全天候全天时的特点。
1.2 毫米波雷达参数
本文以图3 所示的毫米波雷达为对象,进行雷达结构组件设计,此雷达的频谱为77GHz,以保证探测的精度与探测目标的多样性。
图3 毫米波雷达
此款雷达的基本参数如表1。
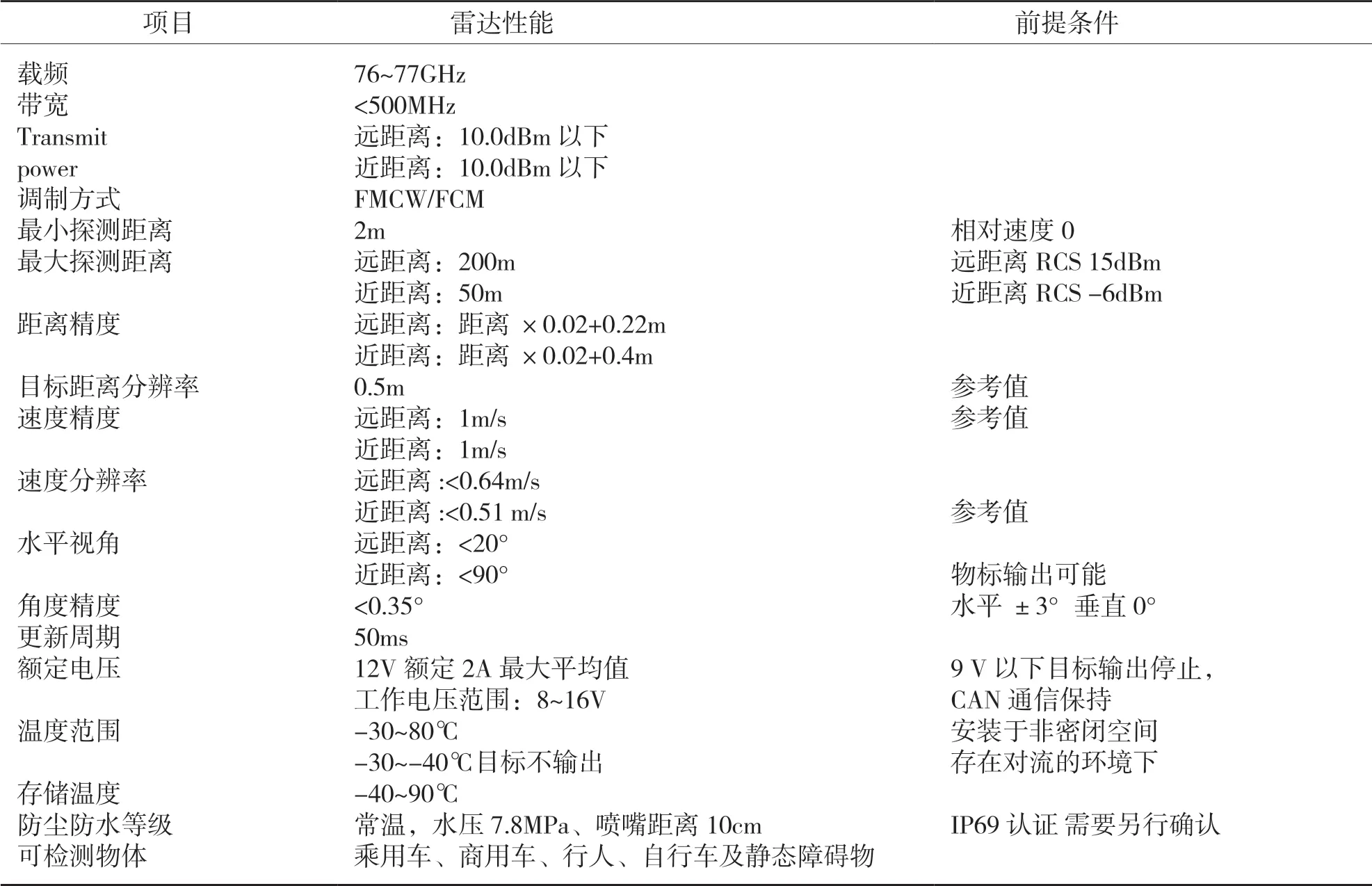
表1 雷达基本参数
2 毫米波雷达布置要求
2.1 毫米波雷达布置位置
毫米波雷达一般要求安装在车前端水平正中间的位置(如图4),离地高度依据毫米波雷达选型不同而不同,也与布置在商用车或者乘用车的位置有关。目前乘用车上的离地高度为300~400mm,商用车上的为600~800mm。
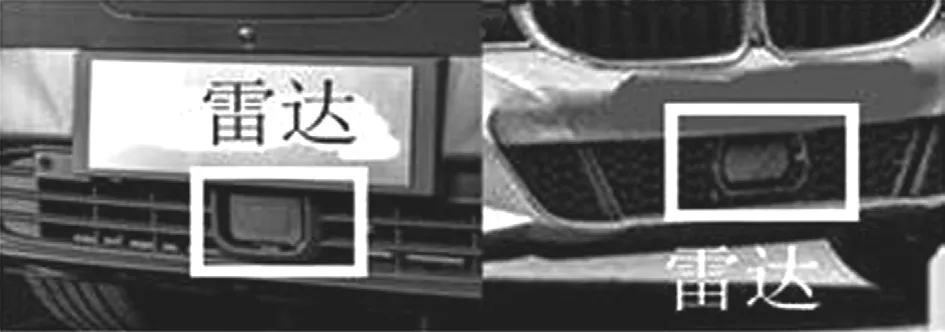
图4 雷达布置位置
另外在毫米波雷达发射的信号范围内需要没有金属遮挡物,且雷达距离周边件不小于10mm;雷达布置角度一般要求为:水平轴误差在±3°以内;垂直轴误差在±2°以内;面内旋转误差在2°以内。
完成毫米波雷达布置还需周边相关车身(如前保险杠、前格栅、牌照框、前防撞杠等)模型数据,车头与地平线夹角(车辆空载、半载、满载时)和车配位置及尺寸等。
2.2 毫米波雷达安装形式
毫米波雷达在整车上安装主要有两种形式。一种为裸露型,即毫米波雷达在整车前端可见,此种安装方式对毫米波雷达信号干扰小,保证毫米波雷达性能,降低成本,但毫米波雷达有破损风险;另一种为隐藏型,即毫米波雷达前面有罩盖,罩盖应尽可能避免雨雪尘霾、地面污水泥浆、飞沙走石对毫米波雷达天线罩的沾污、覆盖、腐蚀与损伤。毫米波雷达最好安装在相对干净、散热较好的空间中,以减小损坏的风险,但是罩盖设计优劣影响毫米波雷达性能。
3 毫米波雷达结构组件设计
为了保证毫米波雷达在整车上的正常使用,通常要有支架与车身相连及有雷达罩盖以保护毫米波雷达。
3.1 毫米波雷达支架设计
毫米波雷达支架设计主要从支架刚性及毫米波雷达安装后角度可调性两个方面考虑。目前毫米波雷达与支架采用螺纹连接或者卡扣连接,支架与车身一般采用螺纹连接。为了保证毫米波雷达的可靠性,支架刚性要求是比较高的,本次设计采用冲压钢板作为支架主体。
另外要保证毫米波雷达能达到装配精度要求,需要支架在X、Y、Z 三个方向上可以进行微调,所以支架与车身采用3 点固定(如图5),且一个安装点为可调节状态,在车辆下线标定时可以对毫米波雷达进行角度微调。

图5 雷达支架
3.2 毫米波雷达罩盖设计
在毫米波雷达表面设计罩盖,罩盖设计要考虑罩盖的曲率半径、罩盖材料,以及罩盖与毫米波雷达之间的距离、毫米波雷达与罩盖的安装角度要求。
毫米波雷达最好安装在平坦的保险杠上,过弯的保险杠会影响毫米波雷达的功能,对于罩盖其水平和垂直方向的曲率半径建议满足R>500mm的要求(如图6 与图7)。
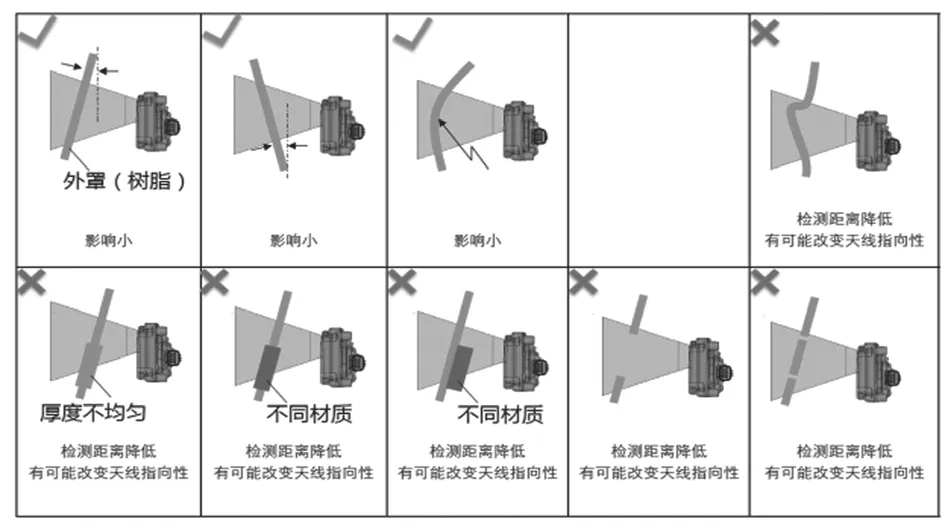
图6 可透电波罩盖垂直方向
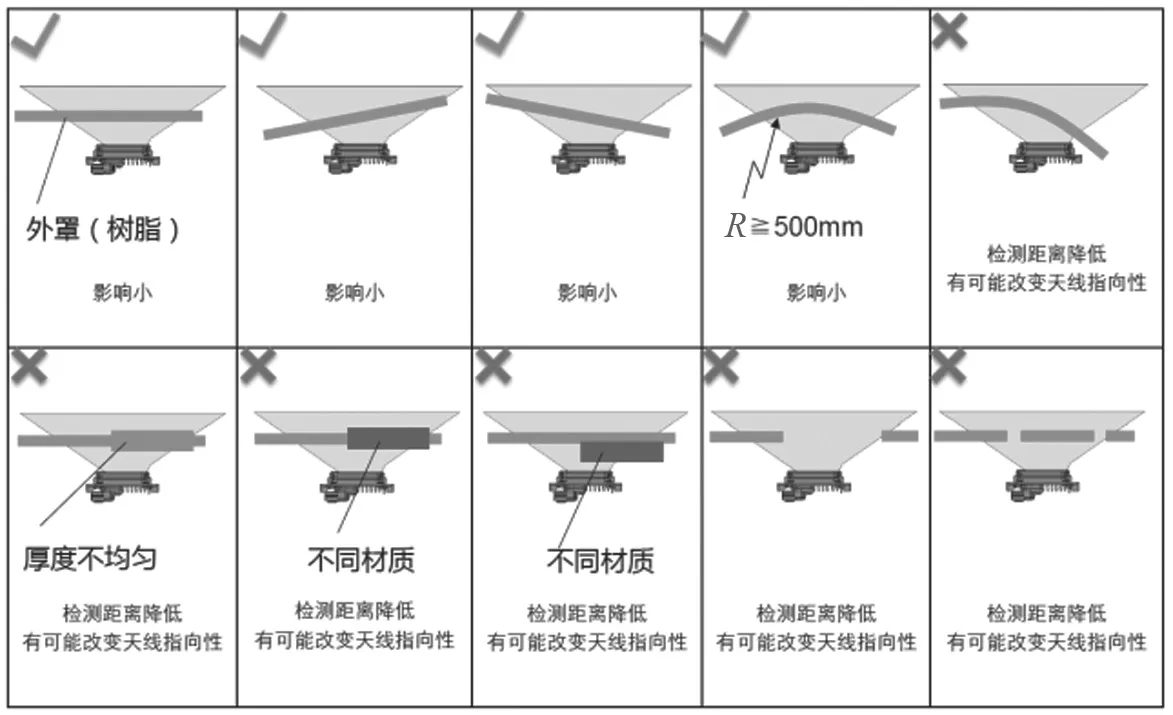
图7 可透电波罩盖水平方向
另外罩盖的材料也有明确要求,以保证毫米波雷达探测的准确性。罩盖的材料必须避免使用金属,此外金属涂料也必须避免用于罩盖表面涂覆,金属涂料也会有屏蔽效果,而屏蔽效果会影响雷达信号。射频天线的信号不仅受涂料材质影响,也受上漆厚度影响。如果涂料存在着大的衰减因数,雷达效能将随着衰减,毫米波雷达的效能能够被罩盖材质与涂料厚度影响,因为不同材质和厚度会造成雷达信号的不同衰减。表2 是建议的罩盖材料及罩盖厚度,且罩盖厚度公差必须控制在5%以下。
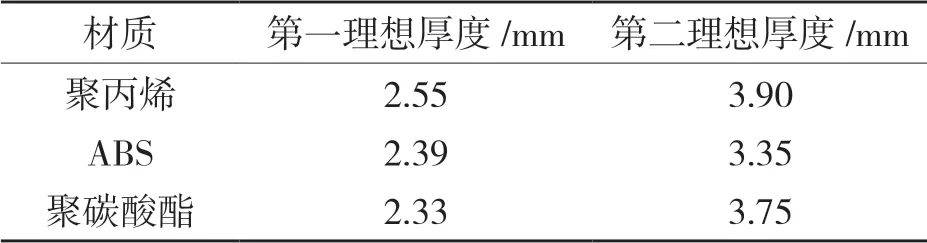
表2 罩盖的材料及罩盖厚度要求
罩盖与毫米波雷达的垂直方向的安装倾角θ 建议为8°(如图8),以保证该毫米波雷达的发送与接收效果。
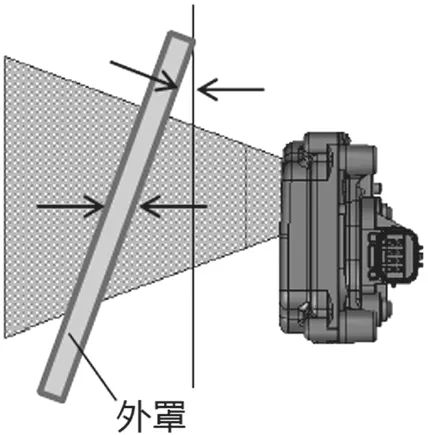
图8 垂直方向安装倾角
4 试验测试
4.1 毫米波雷达下线检测
目的是通过测量毫米波雷达轴线与车身行驶方向轴线在水平及垂直方向上的偏差角度,进行软件补偿使两者轴线重合或在一个允许的范围内。
首先搭建校正测量环境,参照图9。
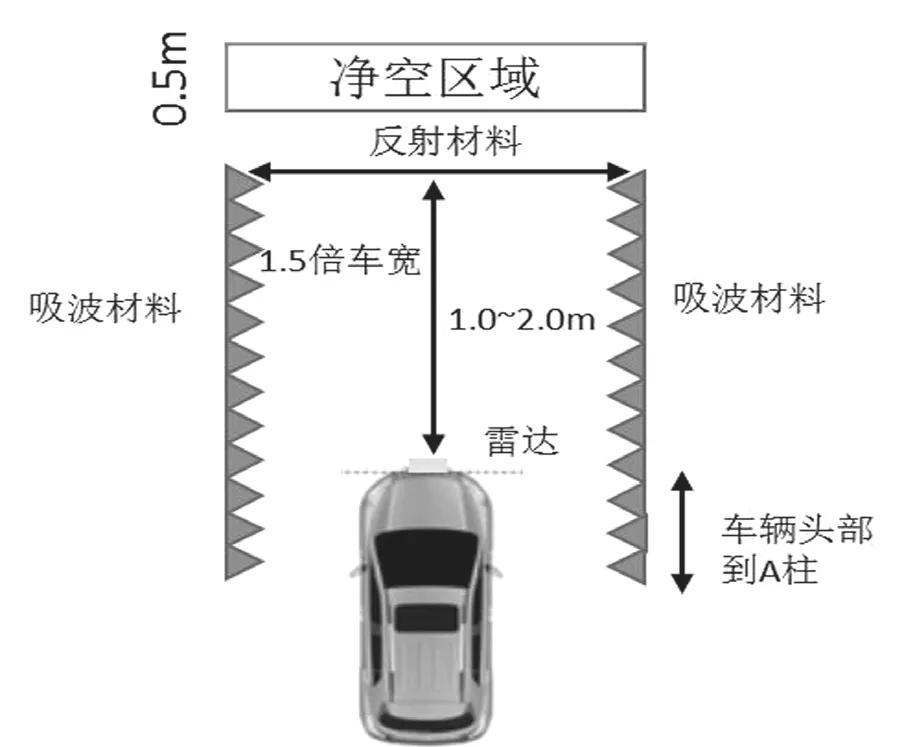
图9 基本校正测量环境
参数参考图9 所示,金属反射板与毫米波雷达前表面之间(1.0~2.0m)、金属反射板后方0.5m的区域内,不允许有任何金属反射物或任何障碍物。毫米波雷达垂直方向净空角度为±20°或净空高度3.0m,水平方向净空角度为±70°或1.5倍车宽。通过反射板反射目标物信号,可以测量毫米波雷达轴线与车身行驶方向轴线在水平及垂直方向上的偏差角度,该角度可通过软件自动进行水平及垂直角度的补偿校准,如果角度偏差过大,超出补偿范围,可以通过支架调整螺栓对毫米波雷达角度进行调整。
4.2 雷达组件的试验验证
根据GB/T 28046.3-2011《道路车辆 电气及电子设备的环境条件和试验 第3 部分:机械负荷》与公司《驾驶辅助系统DV 试验计划书》中的规定,对试验件进行并完成了振动试验。
试验件按实际工作状态安装在专用夹具上,夹具刚性固定在振动台水平滑台(X 向、Y 向)或扩展台面(Z 向)上(如图10),振动试验采用两点平均控制方式。控制点均位于夹具上,雷达上另有监测点1 个,试验结束毫米波雷达性能测试通过。
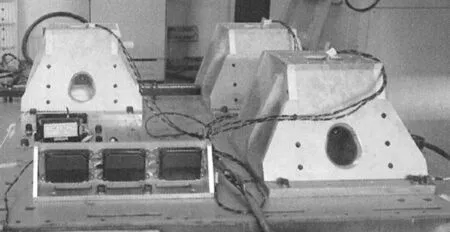
图10 试验件在振动台状态
5 结论
本文通过介绍车载毫米波雷达结构组件设计,为同类产品设计提供一些启示,在保证产品使用性能的同时,也要考虑设计合理性、标定的可实施性及产品生产的可靠性。