智能控制理论案例教学在车辆工程专业中的应用
2022-06-15石沛林郑辽东赵玉帅王牧天
石沛林,郑辽东,赵玉帅,王牧天
(1.山东理工大学 交通与车辆工程学院,山东 淄博; 2.山东理工大学 机械工程学院,山东 淄博)
一 引言
智能控制技术是目前控制理论的最高形式,代表着现代控制系统理论的全面发展,能够高效解决更复杂的控制和管理问题,智能控制技术全方位广泛应用于航空航天、机器人控制、过程控制(石油化工、冶金建材、轻工纺织、生物制药)、车辆工程、路桥隧道、交通运输、智慧农业、家用电器、企业管理和金融服务等领域[1-7]。
智能控制理论课程理论和实践并重,对于学生的创新意识、实践水平以及创业精神的培养具有非常重要的作用。课程内容涵盖:神经网络、模糊控制、遗传算法、故障诊断和专家系统。当前课程讲授过程中的主要问题为:首先,以往的老师讲课学生听讲是一种单一方向的信息传递,这种教学模式难以调动学生的学习积极性;其次,教学与具体实践存在一定脱节现象,因而从智能控制学科的发展特点和该学科目前呈现的课程教学效果来看,很有必要引入创新教学理念,对课程教学手段进行改革。
二 案例教学的提出与建设的紧迫性
案例教学法是一种创新形式的教学方法,起源于二十世纪八十年代,由美国教育研究组织卡内基小组(Carnegie Task Force)最早提出了这一方法并进行了深入的教学研究,他们倡导教师在传统课堂教学中加入案例讨论环节,鼓励教师根据教学目的和内容,课前准备各种现实案例,以便于课堂上展示并引导学生积极参与,组织引导学生结合案例勤于思考、敢于争鸣、善于讨论、清晰表达自己的思想,以期培养学生认识、分析和解决问题的综合能力[8-10]。
智能控制的研究和实践应用相对丰富,但将科研和实践应用的成果反哺到教学上,尚存在挖掘不足、总结不够的问题,教学上表现为案例资源匮乏、供给不足,特别是与当前经济社会密切联系具有较强现实意义且与时俱进的新案例较少。智能化是目前全球研究的热点之一,案例教学能极大促进师生交流互动,提升课堂教学质量,教师可以构建案例库,根据自己教学需求从案例资源中选取相应案例;案例教学法也可以作为其他各种教学模式的补充,从不同方面、以不同角度加以应用,从而提高课堂教学质量。案例能够传递最新消息,同时有利于研究生特别是专业学位研究生提高理论知识的综合工程应用能力。
近年来,随着我国经济日益繁荣和人民生活水平蒸蒸日上,为了减轻劳动者负担和提高生活质量,智能控制可以说已应用于各行各业,尤其是基于人民生命财产安全考虑的许多不适合人员现场工作的恶劣环境或危险场所,是目前各国研究的热点领域,但我国的教学案例库建设水平相对较落后,为了响应“新工科”服务国家战略、满足工程教育认证要求、体现学科专业前沿和以学生为中心的教育教学理念,针对教育部对车辆工程类各相关专业硕士研究生的培养要求,教学中提出了一些车辆工程专业领域智能控制理论课程案例库建设值得思考的一些想法,对课程案例库建设及其相应的教学方法进行了初步探索。具体案例教学应用摘选如下。
三 案例教学应用选例
(一) 基于误差反向传播神经网络的自动紧急制动系统控制策略案例
误差反向传播(Back Propagation,BP)神经网络在智能控制领域应用十分广泛,它的主要的优点在于其信号正向传播,误差反向传播,因为这种神经网络结构层次较多,所以它被定义为多层前馈神经网络。BP 神经网络的层级可以分为输入层、隐含层、输出层(以下分别简称I 层、H 层、O 层),同一层又可分为左层(L 层)和右层(R 层)。BP 神经网络的基本单元是神经元,在同一层神经网络内,L 层与R 层的各个神经元之间均有连接,但其不同层次的神经元之间又相互独立。BP 神经网络可以按照一定的方式进行训练学习,当神经网络接收到用于练习的信息后,神经网络的I 层会发出神经元的激活值,并通过各H 层进行传递,最后在O 层输出相应的网络响应;为了减小信号传递过程中产生的误差,误差会从O 层发出,经过H 层返回I 层(同层从R 层到L 层),逐层修正每层的连接权。由于这个减小误差过程是从O 层到I 层一层一层传递的,所以被称为“误差反向传播算法”。 通过这种误差逆向传播训练的不断修正后,从而提高网络响应对输入模式的准确性。
在制动距离模型中,BP 神经网络通过分析驾驶员驾驶状态,自动识别车辆当前行驶状态,并修正车辆安全距离,记录驾驶员反应时间,同时监测驾驶工况,对不同工况的冲击度进行测量并进行分析计算,在此基础上,基于当时的道路情况,确定和驾驶状况有关的一系列信息,最后得到自动紧急制动系统控制(Automatic Emergency Braking,AEB)参数,最后,在系统中进行应用,以提高自动紧急制动系统的控制效果,该系统的控制流程如图1 所示。

图1 制动系统控制流程
(二) 轿车ABS 故障诊断案例
车辆制动防抱死系统(Antilock Braking System,缩写:ABS),由其内部的电子控制器(electronic control unit,ECU)控制,实现制动、速度监测、调节制动压力等功能。该系统能有效防止车辆在紧急情况下的车轮侧滑和方向失控,即保障车辆刹车时车轮不被锁死,使汽车在刹车状态下仍能转向。汽车ABS可保证汽车制动方向稳定,它是一种具有防滑、防锁死等优点的汽车安全保障系统,其实现原理是轮速传感器实时检测汽车车轮转速,获取的速度信号传送到汽车ECU 内进行分析,当发现车轮即将要抱死时,控制系统会向制动压力调节器传递信号,由制动压力调节器对汽车进行制动-保压-减压-再增压等一系列调整,从而防止制动过程中轮胎锁死。总之,在车辆紧急制动时,系统会自动调节制动压力,防止车轮被锁死,保证车轮和地面具有附着最大力。最大限度保证车辆和人员在突发情况下的安全。
教学中利用故障树技术理论,建立ABS 故障树模型,通过引用模糊评价矩阵对专家经验进行合成评判,进一步优化 ABS 故障树,并将故障树顶事件和底事件的相关结果应用到专家系统设计中,从而提高故障诊断的准确性。根据故障信息实现BP 神经网络样本的建立与训练,得到所需的神经网络。将神经网络与故障树专家系统进行有效结合,完成基于两种机制的轿车ABS 故障诊断专家系统的总体设计和各个模块设计,轿车ABS 故障诊断系统功能模块图如图2 所示, 基于神经网络与故障树专家系统的诊断流程图如图3 所示。
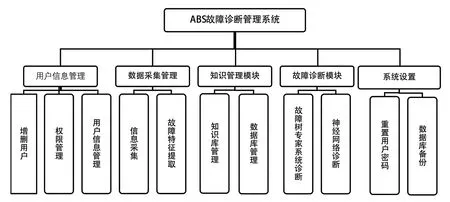
图2 轿车ABS 故障诊断系统功能模块
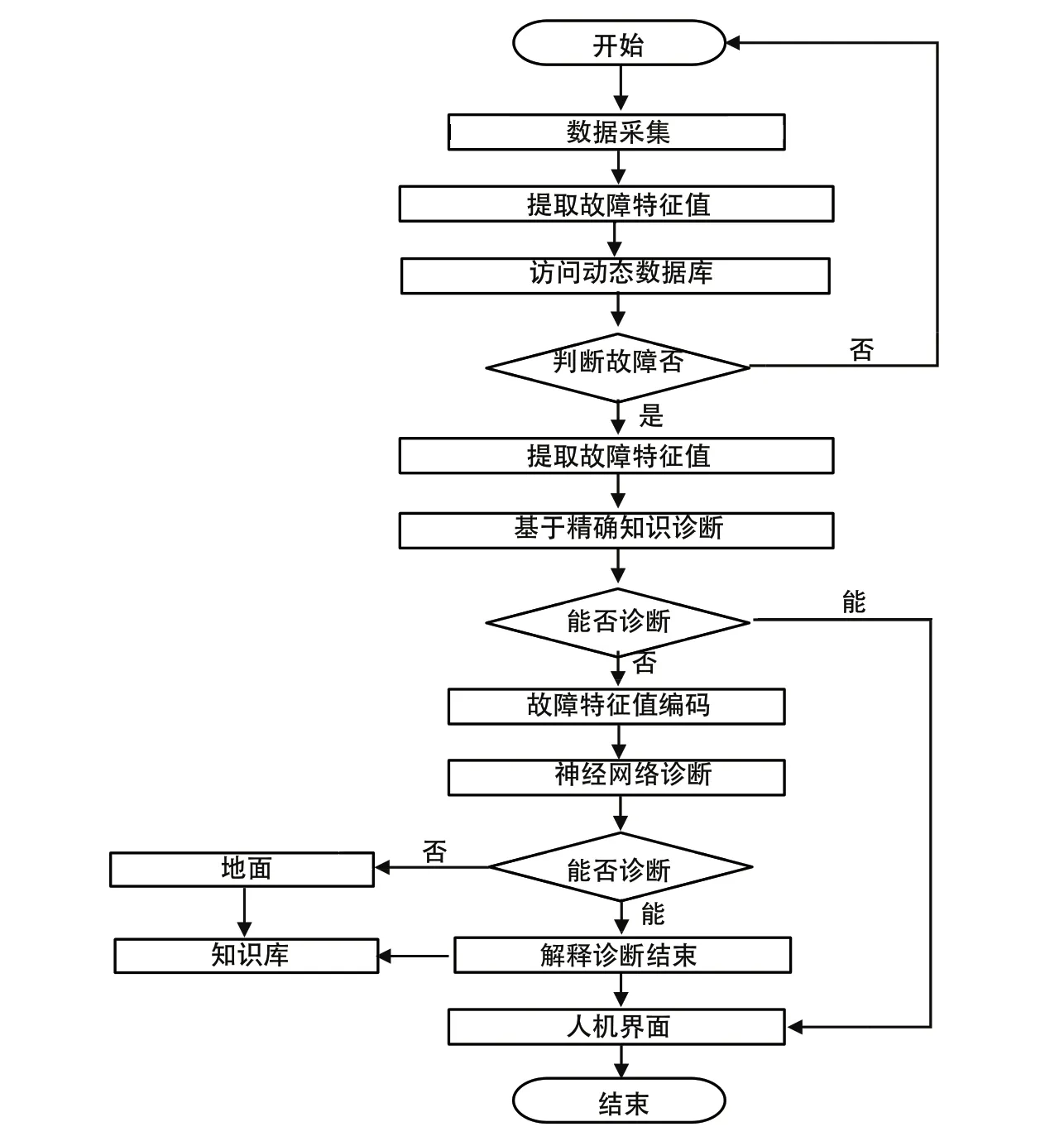
图3 基于神经网络与故障树专家系统的诊断流程图
在智能控制理论教学过程中,通过理论讲解和分析,帮助学生们了解智能控制系统的结构、特点,通过案例图解项目分析和讨论,理清了智能机模糊控制系统具体的实现方法和手段,为同学们未来的工作和学习打下了坚实的基础。
总之,在教学过程中引领学生理解各种智能控制算法的特点和各自的应用领域,引导学生进行更深入的学习研究[8],并提出算法优化的思路和方向。比如神经网络算法教学中,不仅让学生明白神经网络算法具有强大的非线性学习能力,在模式识别、数据分析和挖掘等众多领域应用广泛,还要让学生知道神经网络控制算法自身也存在局限,即虽然其来源于神经科学的发展,但并不意味着可以将神经网络直接取代人类脑神经系统,目前神经网络模型普遍采用的激励函数,激励方式和人类脑神经系统相比,相去甚远,未来发展之路遥远,由此激发学生积极思考和探索。
智能控制理论与技术应用广泛,教学过程中还要注重学生工程设计能力的培养[9-10],我们知道工程设计能力是由设计者体现出来的,所以要求学生按照一定的设计原则和设计方法来表达自己的设计思想,通过典型的具体代表性的神经元网络、模糊控制器理论及实际应用,再运用MATLAB 语言编程并进行模拟仿真实验,理解和掌握智能控制系统的设计方法,形成理论联系实际的贯通式掌握,使学生的学习过程原理清晰,方法明确,应用得当,从而极大地激发学生的学习热情,提高学生学习的积极性、主动性和自觉性。
四 结语
课程所选案例反映的教学目标明确,案例和生产生活实际紧密结合,组建了有利于研究生课堂质量提升与培养研究生分析问题、解决问题能力的车辆工程及交通工程的智能控制系统教学案例库,建立多学科知识与案例的融合与统一。在建设过程中根据教师教学需要编写教学案例,在每个教学案例中详细给出案例问题的提出和原理分析,对于具体的案例问题进行仿真、故障诊断和控制,并能综合对比分析结果。不仅使学生能熟悉工程系统的设计流程,同时也培养了研究生需要具备的科研思维,有利于研究生自主进行智能控制系统的研究、设计、开发与调试,形成了一套系统的、完整的、具有行业特色的车辆工程智能控制系统教学案例库。
智能控制理论案例化教学过程的探索和应用,拓宽了专业知识面,理论与实践联系更加紧密,加深了学生对相关专业知识的掌握,提高了学习积极性和教学质量,值得在类似课程的教学过程中加以推广和应用,对于车辆工程领域案例教学的推广应用及倡导新工科教学理念具有一定的借鉴和参考价值,案例教学的应用推广前景十分广阔。