一种翻盖式集装箱的设计与实现
2022-06-15郭黎
郭 黎
(中国电子科技集团公司第三十八研究所,安徽 合肥 230088)
0 引言
伴随着无人机在军事领域的成功运用,世界各国都注意到了军用无人机的优势。各国对军用无人机越来越重视。军用无人机是充分利用信息技术革命成果发展的高性能信息化武器装备。而集装箱式无人机发射系统,将无人机和发射架收纳在集装箱内,具有机动性强、隐蔽性好的特点,是近几年无人机领域研究的热点[1-2]。
本文从集装箱结构设计、翻转机构设计与计算、伺服控制系统设计三个方面,系统地介绍了某翻盖式集装箱的设计与实现。结构设计充分考虑了无人机发射空间要求、发射时产生的高温和振动载荷对集装箱的影响,伺服控制器采用可编程逻辑控制器(Programmable Logic Controller,PLC)作为主处理器。目前该翻盖式集装箱已经实现,满足无人机发射系统工作方式等要求,系统运行稳定,环境适应性强。
1 系统总体设计
翻盖式集装箱系统的主要功能是接收控制中心指令,对集装箱进行展开和撤收,与无人机发射系统进行数据通信,接收无人机发射系统状态,并上报当前自动架设状态。
该系统总体设计主要包括集装箱结构设计和伺服控制系统设计。集装箱结构设计主要包括安装框架、左右翻转顶盖、右翻转顶盖、翻转机构、开门机构以及锁紧机构的设计,伺服控制系统设计主要完成状态数据采集、逻辑运算及控制驱动等功能的实现。
2 集装箱结构设计
2.1 总体结构设计
该集装箱为开顶式集装箱,上半部设置为左右顶盖结构,顶盖相对车厢沿两侧轴心线旋转,左右翻转顶盖分别为向车厢两侧开盖形式,顶盖通过内部的电动缸完成开闭。顶盖关闭时,通过锁紧机构可靠锁紧,顶盖开盖角度180°。电动缸的展开及撤收通过多圈编码器控制,在折叠到位均设置减速功能,避免顶部展开和闭合到位时产生冲击。集装箱后端采用对开门扇结构,方便人员维修及工作状态气流快速排出。活动顶盖与端部门扇与箱体对接处采用密封圈进行密封,同时接缝处采用排水槽结构以满足防雨要求。活动顶盖设计有锁闭结构,保证运输状态顶盖可靠锁紧及密封要求[3]。总体结构如图1 所示。

图1 翻盖式集装箱总体结构示意图
2.2 主要结构设计
2.2.1 翻转机构
翻转机构主要用于顶盖的打开及闭合。翻转机构由一组同步电动缸、四连杆机构、安装座以及传动轴等部件组成,通过电动缸推动四连杆机构运动,达到左右顶盖打开及闭合的目的[4]。整个集装箱共设置2 个翻转机构,为保证左、右翻转顶盖到位后定位,以及避免冲击翻转机构,集装箱两侧壁下方设置有两个定位挡块。
2.2.2 开门机构
为了方便车厢内部设备的安装、操作、维修以及为无人机尾焰预留空间,在集装箱尾部设有电动推缸打开式对开门,所有门和门框均为矩形钢管拼焊成型,强度可靠[5]。开门系统的承载驱动机构具有结构简洁、运动阻力小、安装方便及可靠性高等优点。开门机构采用两组电动推杆控制两扇门的关闭和开启,通过信号控制电子锁解锁,然后通过电动推杆带动左右门绕铰链旋转打开,从而完成后门的开启和闭合。
3 翻转机构计算
翻转机构[6]由同步电动缸驱动四连杆机构,达到左、右顶盖翻转180 度的运动,主要克服左、右顶盖的重力和风阻。因右翻转顶盖的质量较大,所以以右翻转顶盖为计算对象。并且,因采用的是机械同步的电动缸,所以不考虑不同步造成的影响。将右翻转顶盖简化为质点,最大拉力的位置根据结构分析可能有两处。
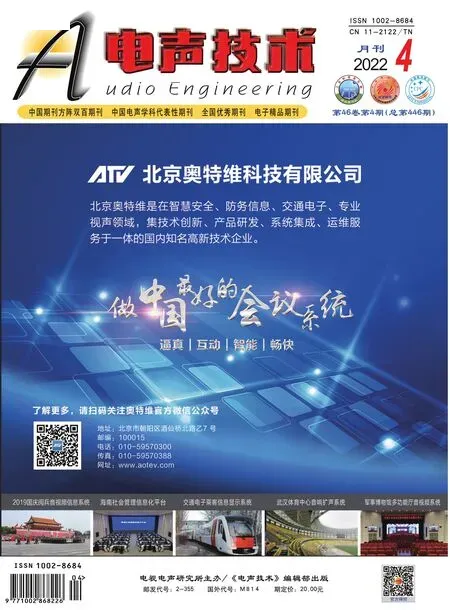
(1)当右顶盖处于最底部位置时,其受力情况如下图2 所示。当重心与铰链铰点处于同个水平线,所需的电动缸拉力最大。质心位置可简化为质心G。连杆因质量较小可忽略不计。取右翻转顶盖单独进行静力学分析,承受重力、连杆对右翻转顶盖的作用力。根据力矩平衡原理,以O1点对右翻转顶盖取矩。因两个翻转电动缸同时动作,所以单个电动缸负载按照重力的一半计算。
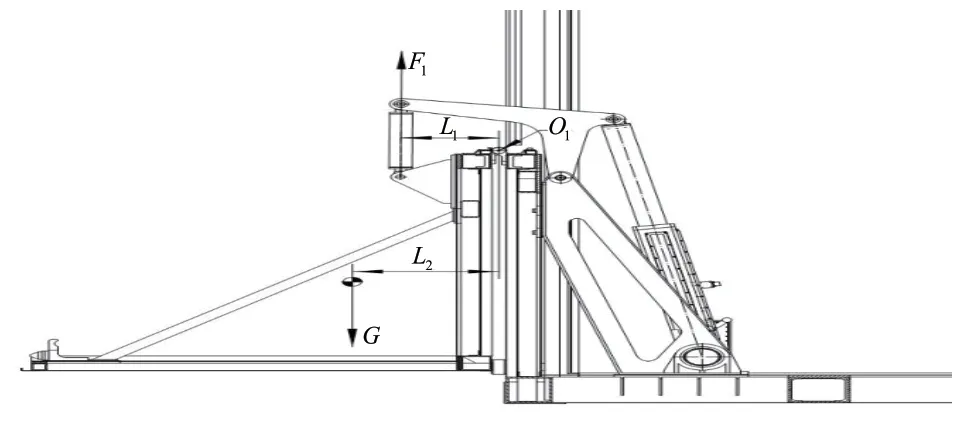
图2 右翻转顶盖受力图

式中:F1为连杆对右翻转顶盖的作用力,L1为连杆对右翻转顶盖的作用力相对于铰接O1点的力臂,L2为右翻转顶盖的重力相对于铰接O1点的力臂。
再对四连杆机构进行静力学分析,其受力情况如图3 所示。
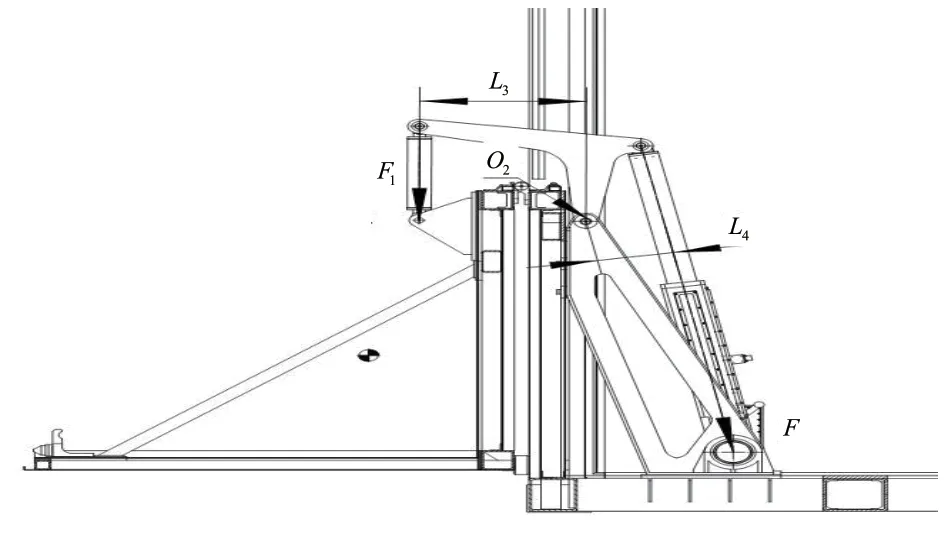
图3 右翻转顶盖受力图

式中:F为电动缸的作用力,L3为连杆对右翻转顶盖的作用力相对于铰接O2点的力臂,L4为电动缸作用力相对于铰接O2点的力臂。
(2)当重心与铰链铰点处于同个水平线时,其受力情况如图4 所示。
图4 右翻转顶盖受力图

再对四连杆机构进行静力学分析,其受力情况如图5 所示。
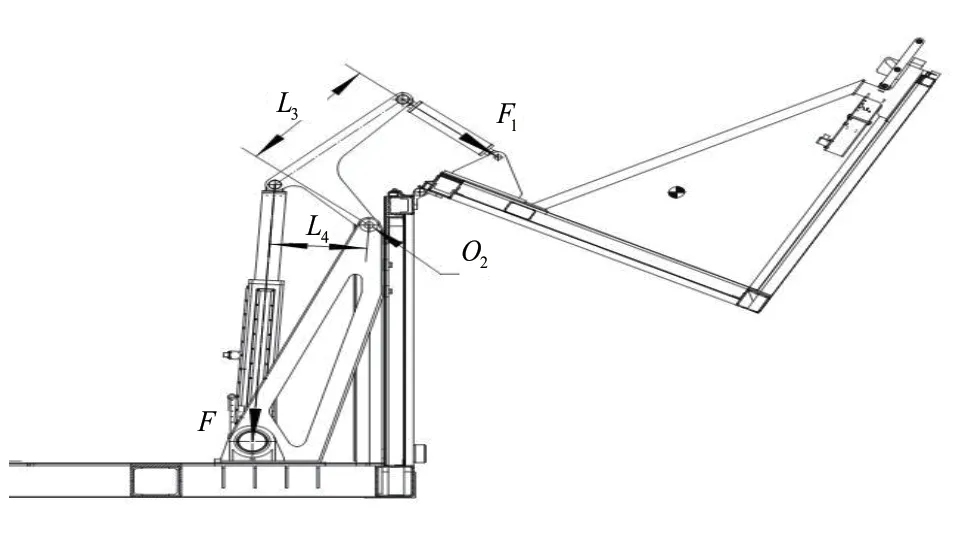
图5 右翻转顶盖受力图

本文中右翻转顶盖质量为540 kg,取翻转电动缸最大拉力1 500 kg,根据铰点起始位置,可得翻转电动缸最小绞点距为772 mm,最大绞点距为1 323 mm,行程要求为551 mm。
4 伺服控制系统设计
伺服控制系统具有顶盖解锁/锁紧、翻转顶盖展开/闭合、尾门解锁/锁紧、尾门打开/关闭、无线互联、状态指示以及报警等功能。伺服控制系统构成及接口框图如图6 所示。触摸屏作为主要操作设备使用,按钮为冗余设计,在触摸屏失效时使用。

图6 伺服系统构成及接口框图
5 伺服系统的组成
该伺服系统主要由集装箱翻转顶盖展开/闭合、尾门展开/关闭、运输锁定、控制箱以及供电系统等方面组成。
集装箱在运输时处于关闭状态。在进入发射阵地、飞机起飞前,要将顶盖展开,使无人机发射架能够升起。在发射完毕后,运输前,需要将顶盖重新闭合。顶盖的展开和闭合,由电动缸推动顶盖翻转打开,顶盖到位检测采用多圈编码器实现。
尾门的展开、关闭由电动撑杆完成动作,实现集装箱尾门的展开和关闭功能。
顶盖展开前,伺服系统首先将顶盖运输锁进行电动解锁,解锁后再进行展开动作。顶盖闭合到位后,进行顶盖运输锁锁定。顶盖运输锁均由电机带动锁定机构实现,解锁和锁定均由检测开关进行检测,以确保顶盖在解锁后才能展开和运输前锁定,确保设备的安全性。
伺服控制箱是伺服分系统的控制核心,安装在运输平台上,主要有顶盖展开/关闭、运输锁定、操作及状态指示等功能,主要由PLC 控制器、电源模块、继电器、水平仪及操作面板等组成。
6 结语
本文从结构设计、翻转机构计算、伺服控制系统设计三个方面详细介绍了某翻盖式集装箱的工程设计与实现。该集装箱已完成实现,相关指标达到要求,具备耐热、防水等功能,环境适应性强。