基于高频成像声呐的水下小目标跟踪技术研究
2022-06-15郭雪松
郭雪松,王 胜
(中国电子科技集团公司第三研究所,北京 100015)
0 引言
水下小目标跟踪技术是探测水下小目标的关键技术之一[1]。本文在目标检测结果的基础上(本文不讨论目标检测结果的获取过程),通过对声呐图像连续帧的处理,得到目标运动轨迹,并根据目标运动特征过滤掉干扰轨迹,最终获得真实目标的位置、方位等信息。
1 算法设计
水下小目标跟踪技术可分为3 个步骤[2]:一是起始轨迹的建立(包含轨迹头的确定);二是对声呐图像连续帧的处理,确认轨迹并进行轨迹管理;三是轨迹撤销/终止。
1.1 轨迹头
每个轨迹的第一个点称为轨迹头。轨迹生成前,以第一个点为中心,建立一个环形波门。此波门的范围与目标的最大速度、最小速度有关。
1.2 轨迹起始
每一个轨迹头与在波门内的点关联后,都要根据目标的最大速度和最小速度推算出第三个点可能的范围,若第三次关联成功,则可以生成一条起始轨迹。一般假定目标匀速直线运动得到起始轨迹。
1.3 轨迹确认
采用如下方法进行轨迹的确认:
(1)若第四次关联成功,则确认是一条轨迹,放入轨迹库进行管理;
(2)若第四次未关联成功,则采用外推的方法,与假定的目标点进行关联,第五次与真实检测点关联成功,则确认是一条轨迹,放入轨迹库进行管理;
(3)若第四次未关联成功,采用外推的方法,与假定的目标进行关联,第五次仍没有真实检测点进行关联,则清除起始轨迹点。
1.4 轨迹管理
1.4.1 轨迹预测
轨迹预测的方法步骤如下。
(1)根据目标的运动特征建立直角坐标系下的运动模型[3]。目标的模型反映在状态矩阵上可表示为:

式中:A1表示加速运动模型,A2表示匀速运动模型,T表示运动时间。
(2)k+1 时刻预测模型概率μj(k+1|k),如式(3)所示:

式中:πij为状态转移矩阵。
交互权重计算如式(4)所示:

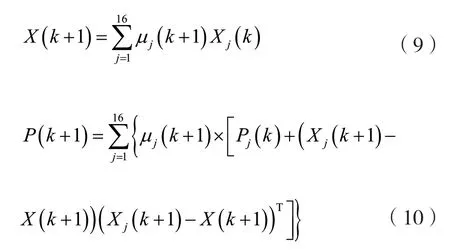
(3)确定k+1 时刻模型j对应的滤波器估计算法的状态输入及其协方差:

式中:Xi(k)表示运动模型i对应的滤波算法在时刻k的输出,Pi(k)是其对应的协方差。
(4)采用kalman 滤波对各个模型的运动状态进行估计。
(5)利用滤波算法获得各个模型的信息及其协方差S,计算各个模型的似然函数L。

(6)利用似然函数更新模型概率:

(7)根据更新后的模型概率μj(k+1),对各模型对应的估计结果进行输出交互,最终完成k+1 时刻的目标状态及其协方差的估计。
由于水下环境的限制及目标在远距离上的回波非常微弱,目标检测的概率会相应地降低,此时目标的轨迹就会不连续。多模型的方法对目标位置的估计更准确,更有利于目标轨迹的管理。
1.4.2 轨迹拟合
目标轨迹的测量点在空间上的离散程度很高,不易判断目标的真实运动方向。在对目标进行估计和预测的同时,对其轨迹进行拟合,能够反映目标的真实运行方向。
(1)在直角坐标系中,将坐标系划分为n×n的棋盘;
(2)对包含轨迹的方格求均值;
(3)如果方格中的点不连续,则可以判定轨迹点在出方格后又进了方格,求两个方格的均值;
(4)将所有的方格点按照时间顺序排列。得到的新轨迹即为拟合后的轨迹。
1.4.3 检测点关联
采用最邻近法进行关联。具体为通过定义以下两个度量来进行数据与目标的关联。
(1)基于欧氏距离的数据有效性度量。在波门中,只有小于门限值的测量点才有可能是目标,由于检测门限设置得较宽松,可能会有多个点符合条件。如果没有其他的度量方法,只能通过增加轨迹分支的方法,通过后续周期的测量与预测值的关联来确定是否为真实轨迹,这会大大增加计算量。因此,可以采用目标尺寸和反射强度的相似性度量来进一步提高关联准确度和关联速度。
华堂村桃形李种植历史悠久,但普遍种植、销售还不到10年时间.村里在产业引导上也做了一些工作:一是有统一印制的礼盒包装,在水果市场上打出桃形李品牌;二是建有一个桃形李市场,供农户和外地客商交易;三是组织过一些桃形李种植技术的培训.另据村支书介绍,村里还与台湾客商合作开发过桃形李果酒,但因为桃形李淀粉含量少没有成功.
(2)基于目标尺寸和反射强度信息的相似性度量。在有效性度量的基础上,对符合条件的测量点进行相似性度量。相似性度量基于以下假设:在空间域和时间序列中,真实目标的尺寸(声呐图像中以像素个数表示)不会发生剧烈变化,即像素个数不会突然增加或减少很多,应该有一个渐变过程。在反目标探测上,基于尺寸的相似性度量需要实验验证,可能依据尺寸的变化不能起作用。在空间域和时间序列中,真实目标的反射强度(声呐图像中以灰度级表示)不会发生突变。在相邻的两个周期中,目标的亮度可能发生变化,变化的程度(或变化速度)应该有一个上限和下限。设置一个门限,只要点在这个门限内,可以认为其是目标的可能性很大。
如果仍然有不止一个点符合条件,可以形成分支轨迹,然后依据轨迹撤销规则对虚假轨迹进行撤销。
1.5 轨迹撤销/终止
针对以下几种情况,需要分别进行处理。
(1)对只有轨迹头的情况,只要其后的第一个周期内没有点迹出现,就将其撤销。
(2)对一条初始化的轨迹来说,如果在以后连续三个扫描周期内没有出现任何点迹(这里指没有关联上任何轨迹点),这条初始轨迹就可以在数据库中被消去。
(3)对于一条已确认的轨迹,可以设定连续4~6 个扫描周期内没有点迹落入相应的关联门内作为轨迹撤销准则。此时,需要多次利用盲目外推的方法,扩大波门,对丢失目标进行再捕获。也可以采用小滑窗检测器,设立一个轨迹结束准则。只要满足该准则,就可以对该轨迹进行撤销。令滑窗宽度为5,轨迹撤销门限为4,这就意味着在连续5 个周期中,只要有4 个周期没有点迹存在,就宣布该轨迹被撤销。也可以采用连续3 个周期没有点迹时宣布该轨迹被撤销。对已经确认的轨迹进行撤销时,可以考虑加大滑窗宽度,以便放宽撤销条件。
(4)对于一条跟踪了很长时间的、稳定的轨迹所对应的目标,在目标离开探测器工作范围时,也需要对其进行撤销。
本文算法的整体流程如图1 所示。

图1 算法整体流程
2 仿真
利用Matlab 仿真所提出的跟踪算法,结果如图2 所示。
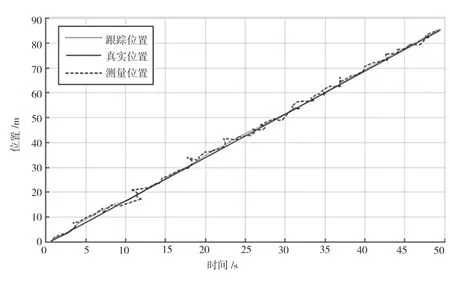
图2 利用Matlab 仿真跟踪算法
利用本文跟踪算法的预测方法与传统的kalman 预测方法[4-5]相比,两者的跟踪误差如图3 所示。由图3 可以看出,本文跟踪方法在不影响实时性的前提下,位置误差相比传统的kalman 预测方法有了很大的改善。
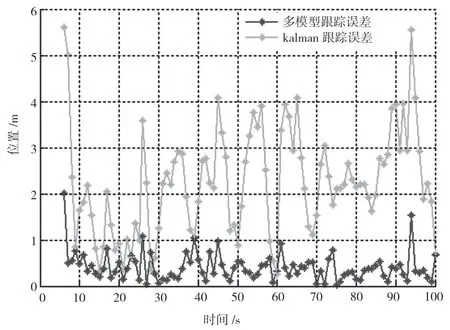
图3 跟踪误差比较
针对多目标跟踪的仿真结果如图4 所示。
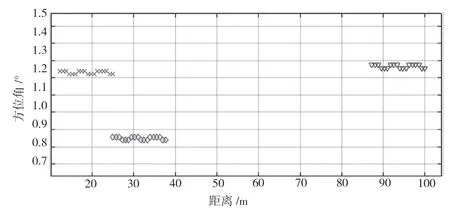
图4 对多目标跟踪算法的仿真结果
2.1 单目标跟踪算法仿真
利用Matlab 对跟踪算法进行仿真,输出的轨迹如图5 所示。
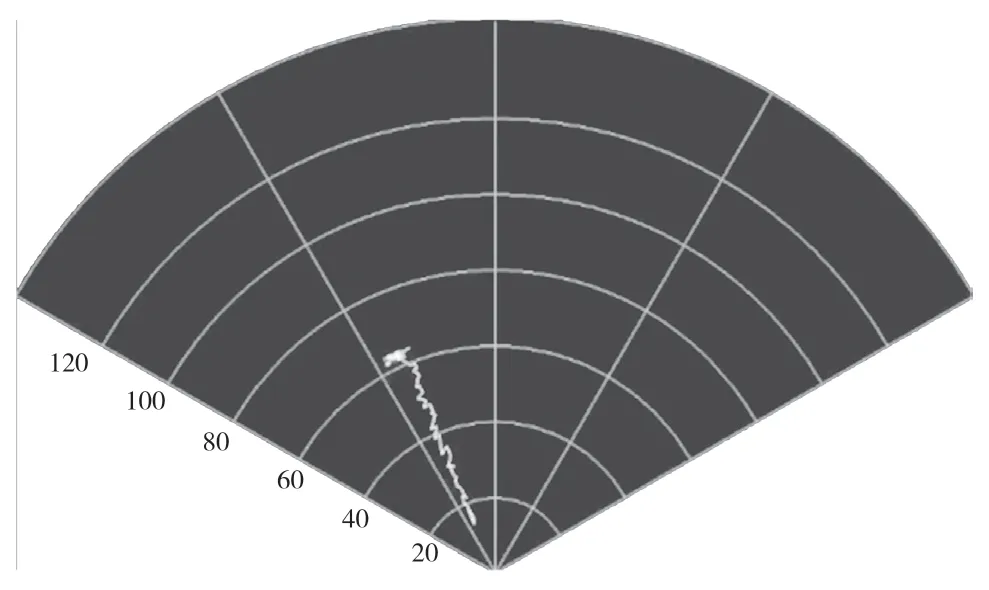
图5 单目标轨迹仿真
添加噪声后的仿真轨迹如图6 所示。噪声为随机在图像中添加的稀疏噪声点,输出的轨迹如图6 所示。
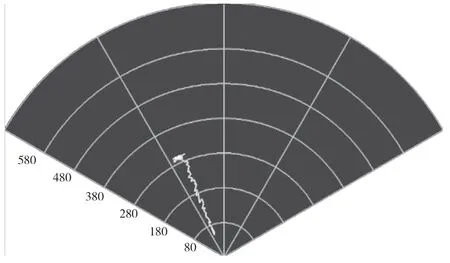
图6 加噪声的单目标轨迹仿真
2.2 多目标跟踪算法仿真
在单目标跟踪算法的基础上,对多目标跟踪算法进行仿真,对多目标跟踪的结果如图7 所示。
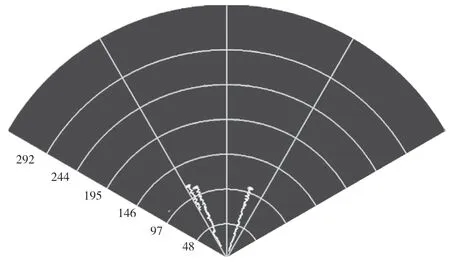
图7 多目标跟踪仿真
3 结语
水下小目标的跟踪分为轨迹起始、轨迹管理以及轨迹撤销/终止3 大部分,其中的核心是数据关联问题。由仿真试验数据验证,本文提出的跟踪方法能够实现对水下小目标的有效跟踪。在此基础上,可以继续研究复杂背景下水下小目标的稳定跟踪方法。