多材料点阵结构的热可编程力学行为*
2022-06-15杨航,马力
杨 航,马 力
(哈尔滨工业大学 复合材料与结构研究所,哈尔滨 150001)
引言
传统点阵结构通过合理的微结构设计获得了轻量化、高比刚度、高比强度,以及弹性、韧性增强等优异的力学性能,实现了缓冲吸能、隔热和振动控制等功能应用[1-9].然而传统的点阵结构一旦制备完成,其预先设定的力学性能以及其他功能通常在使用寿命内保持不变,这制约了点阵结构对不断变化的环境和工作条件的适应与调节能力.设计和制造具有环境适应特性的智能点阵结构,可编程地感知和响应外界变化(例如光强、压强、溶液、温度、电磁场、电化学激励),并在时间和空间上进行形状重构、模式转换和性能调控,仍然是人造材料研究领域一个重要的科学挑战[10].
形状记忆聚合物和合金是应用最广泛的智能材料,能够承受较大的可编程变形,可以通过温度控制恢复原始形状.这种形状记忆效应被用来调控点阵结构的弹性模量、Poisson 比和带隙[11-14].Deng 等通过温度控制液态金属的固液两相转变,实现了由其填充的空芯弹性点阵结构的等效形状记忆效应[15].然而,这种液态金属填充的弹性体和大部分的形状记忆聚合物只具有单向的形状记忆效应,需要通过训练实现可逆的构型转变.虽然液晶弹性体在温度控制下可在向列相和各向同性相之间可逆转变,表现为材料的收缩或膨胀变形,但是其制造工艺复杂,承载能力较差[16-17].
另一方面,可以利用磁场对结构材料的变形进行编程.Jackson 等在空管聚合物点阵结构中填充磁流变悬浮液,通过磁场控制实现结构快速的大尺寸形状重构以及刚度变化[18].但是这类填充结构也存在制备困难、结构复杂、对缺陷敏感等缺点.向聚合物、弹性体、刚性氮化硅膜和水凝胶等基体材料中添加含有磁性的颗粒或纳米线,可以更方便地通过磁场进行远程控制,由其制备的结构表现出极大的可重构性[19-21].然而这种磁控材料缺少形状锁定机制,其变形需要恒定的外磁场来维持.为了达到锁定磁控材料临时形状的目的,Ze 等采用向形状记忆聚合物里添加磁性颗粒的方法,用形状记忆聚合物的热塑性来实现结构多模态、多步的变形和重构[22].但是这种方法制造过程复杂,需要向形状记忆聚合物基体里混合两种类型的磁性颗粒,一种用于感应加热,另一种用于驱动材料变形.
能响应多个物理场激励的智能材料可以提高结构的可控性和灵活性.如由光活性水凝胶和铁磁性纳米线组成的混合材料制成的结构,可以在光和磁场作用下实现快速和可编程的变形[23].由堆叠石墨烯和聚乙烯组成的双层膜可以通过加热诱导变形,由其制备的结构可以在红外照射下实现滚动运动[24].此外,学者们也提出了其他智能材料和结构的激励-响应机制.Cui 等通过复杂的三维微结构设计,获得了具有任意压电系数的压电超材料,通过施加应力,可以选择性地抑制、反转或增强由其产生的电压响应[25].气动控制的结构和软机器人可以实现多种可编程运动和功能应用[26-28].Xia 等和Dehghany 等以电化学和光化学反应为驱动,实现了微点阵结构和凝胶材料的形状重构[29-30].Li 等通过向点阵结构局部滴入不同溶液,利用相邻胞壁的毛细力来改变结构的拓扑构型[31].Liu 等和Zhang 等用两种具有不同刚度和溶胀特性的双材料制备的多孔结构,在水化作用下表现出负溶胀特性[32-33].
近年来,随着多材料3D 和4D 打印技术的不断进步,已经可以制造性能差别很大的、多种材料组成的复杂结构[34-38].通过合理选择组分材料、设计材料空间分布,多材料点阵结构表现出随环境条件变化的响应特性.例如,研究人员使用具有不同热膨胀系数的双材料,设计并制备了具有可调热膨胀系数的点阵结构[39-45].Janbaz 等通过将超弹性和黏弹性特性不同的材料组合成双材料梁,使点阵结构具有应变率相关的力学性能[46].利用非晶态聚合物和弹性体在工作温度下的刚度反转效应(即弹性体的模量相对较低,几乎与温度无关,而由于玻璃化转变,非晶态聚合物的模量随着温度升高,从远高于弹性体的模量降低到低于弹性体的模量),Che 等和Yuan 等提出了热力控制跳变序列和变形模式可转换的点阵结构[47-48].基于这种刚度反转效应以及形状记忆聚合物的形状记忆效应,Song 等通过在第一个热循环中进行两种材料的预应力组装和第二个热循环中的拆卸,实现了结构多模态的形状重构[49-50].基于多材料4D 打印技术,Jeong 等制备了热力控制的大变形、快速反应的旋转多稳态结构[51].Zhao 等和Mueller 等调整由两种具有不同玻璃化转变温度的聚合物材料组成的点阵结构的材料分布,通过温度变化实现了对点阵结构刚度、Poisson 比和变形模式的调控[52-53].
针对目前智能材料和结构激励-响应机制复杂、制备困难等缺点,本文采用具有不同玻璃化转变温度和温度依赖性的多种聚合物材料,结合多材料3D 打印技术对材料的空间分布进行合理设计,提出了一类具有热可编程力学响应能力的多材料点阵结构,并研究了其力学行为.以双V 结构和双U 结构为例,通过温度变化实现对多材料点阵结构弹性常数、压溃响应和结构稳定性的调控,使多材料点阵结构表现出极大的热变形、超弹性和形状记忆效应.
1 热可调结构弹性常数和压溃响应
传统的负Poisson 比结构作为机械超材料的一种,其反常的拉胀行为依赖于其微结构的几何设计,与组分材料无关.所以传统的负Poisson 比结构一旦制备完成,其力学性能通常在使用寿命内保持不变.这制约了负Poisson 比结构对不断变化的环境和工作条件的调节能力.以双V 内凹结构为例[54-60],单材料双V 内凹结构的Poisson 比由其几何参数决定,与构成材料的性能无关,如图1所示.若使用两种材料改进双V 内凹结构设计(如图1(a)所示),则该结构的Poisson 比由两种材料的相对刚度和几何参数共同决定.此时,当两种材料的刚度对温度的依赖性不同时,则可以通过温度变化调整两种材料的相对刚度,进而实现对双V 内凹结构Poisson 比的调控和编程.
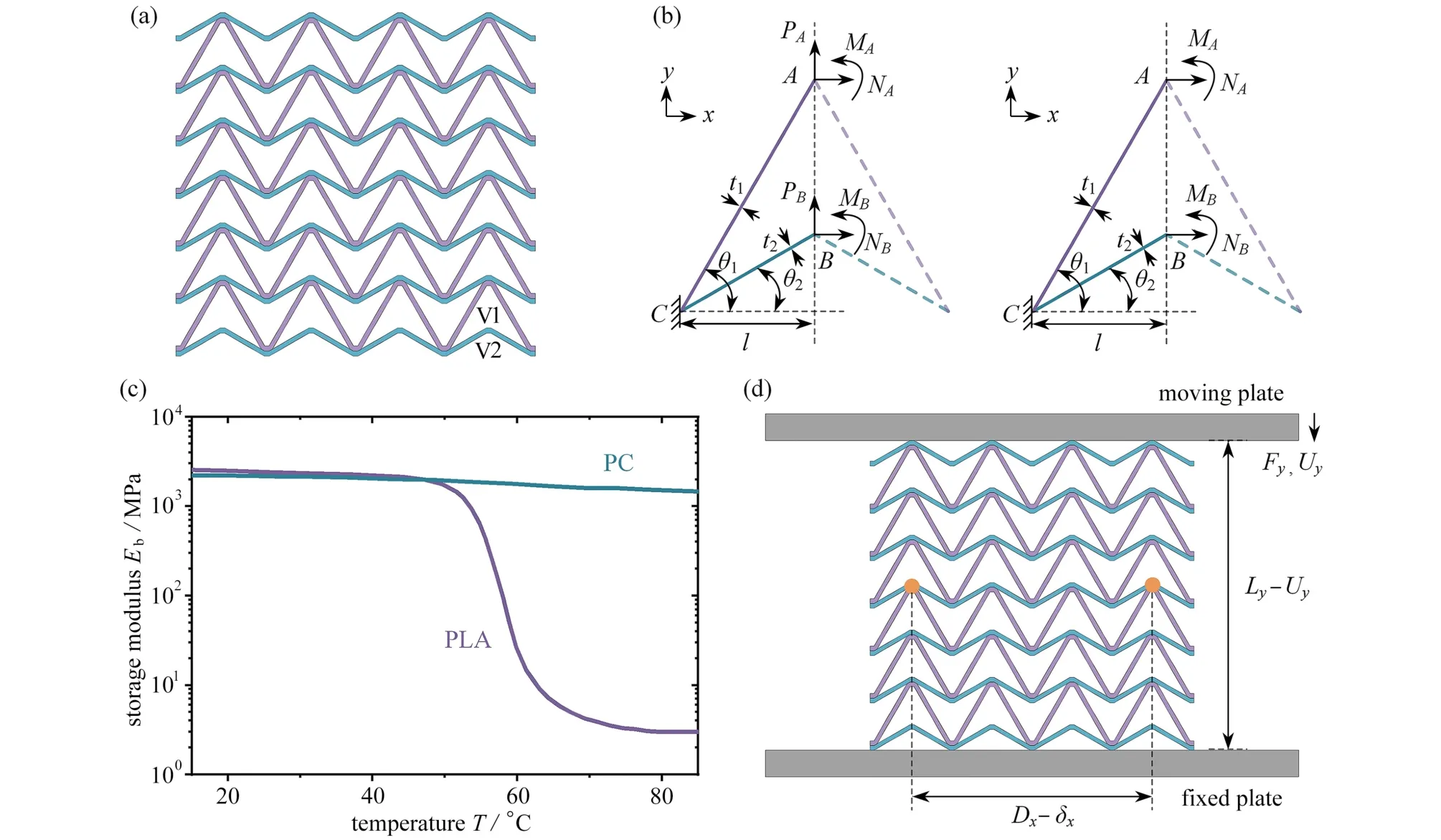
图1 双材料双V 内凹结构:(a)双材料双V 内凹结构示意图;(b)沿y 和x 方向分别加载时的边界条件;(c)PLA 和PC 材料的储能模量与温度的关系;(d)准静态单轴压缩示意图Fig.1 Bimaterial concave double-V structures:(a)schematic diagram of bimaterial concave double-V structures;(b)boundary conditions for loads along y and x directions;(c)storage modulus Eb vs.temperature T for PLA and PC;(d)schematic diagram of quasi-static uniaxial compression
如图1(a)所示,双V 内凹结构由交替堆叠的波纹构件V1 和V2 组成.图中紫色标记部分为V1,弹性模量为E1,密度为 ρ1,面内厚度为t1;蓝色标记部分为V2,弹性模量为E2,密度为 ρ2,面内厚度为t2.θ1和 θ2分别为V1 和V2与x轴的倾斜角,且θ1>θ2>0.此外双V 结构单元的水平投影长度为2l,面外厚度为b.双V 内凹结构的密度和孔隙率分别为

由上述公式可知,双V 内凹结构的密度随面内厚度和组分材料密度的增加而线性增加,而孔隙率仅由几何参数决定.
为了得到双V 结构的等效弹性常数,本文选取的代表性体积单元如图1(b)所示,并做如下假设:1)结构杆件的变形均为小变形;2)结构的杆件均为细长杆,忽略剪切以及其他变形,仅考虑轴向和弯曲变形;3)结构杆件间的连接为刚性连接,且在变形过程中角度保持不变;4)双V 结构在x和y方向上无限延伸,不考虑结构尺寸和边界效应.
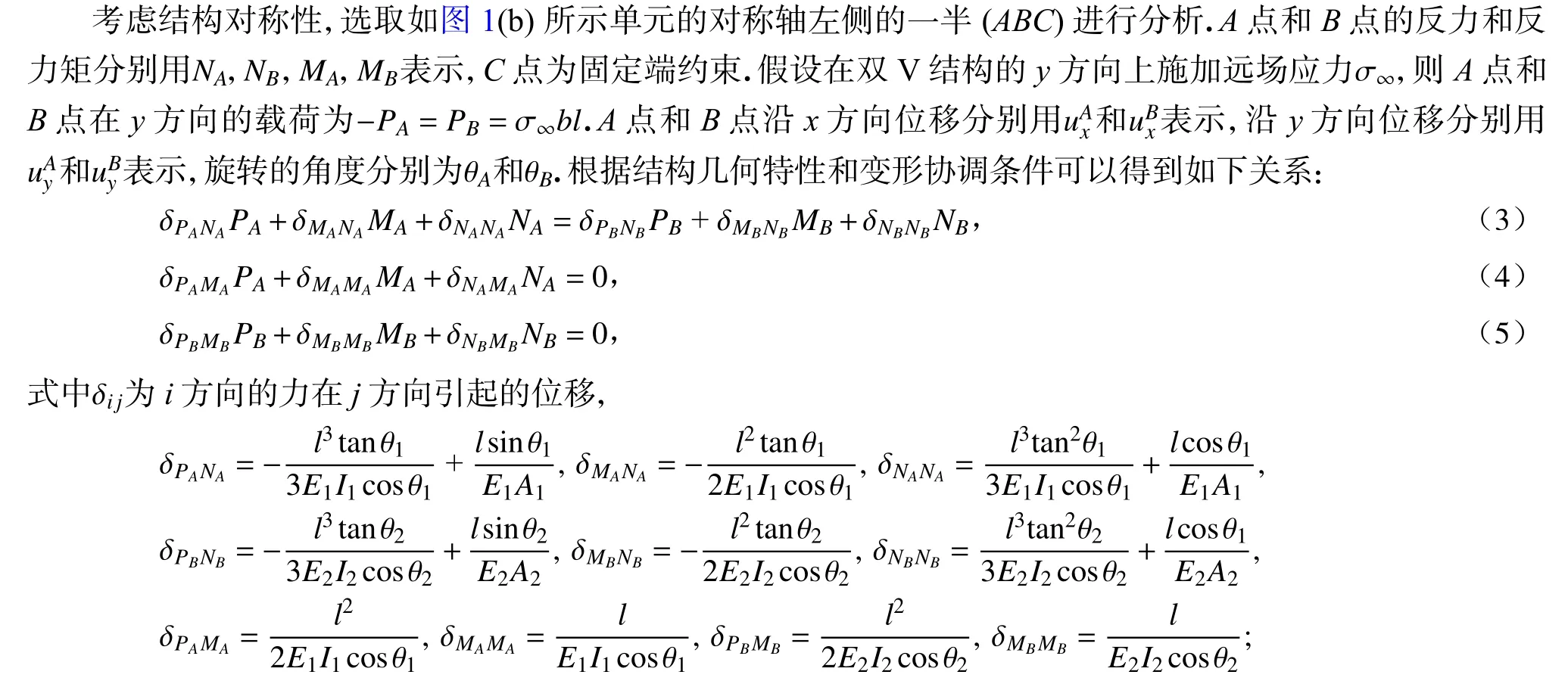
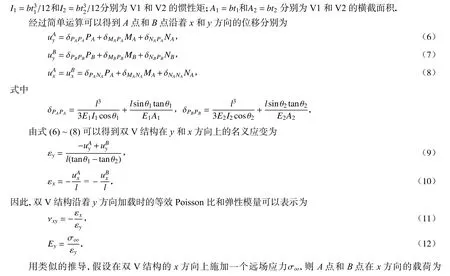
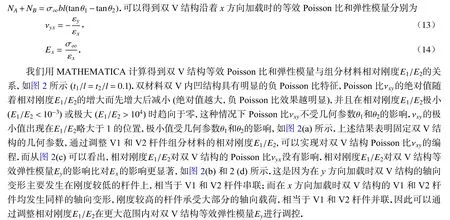
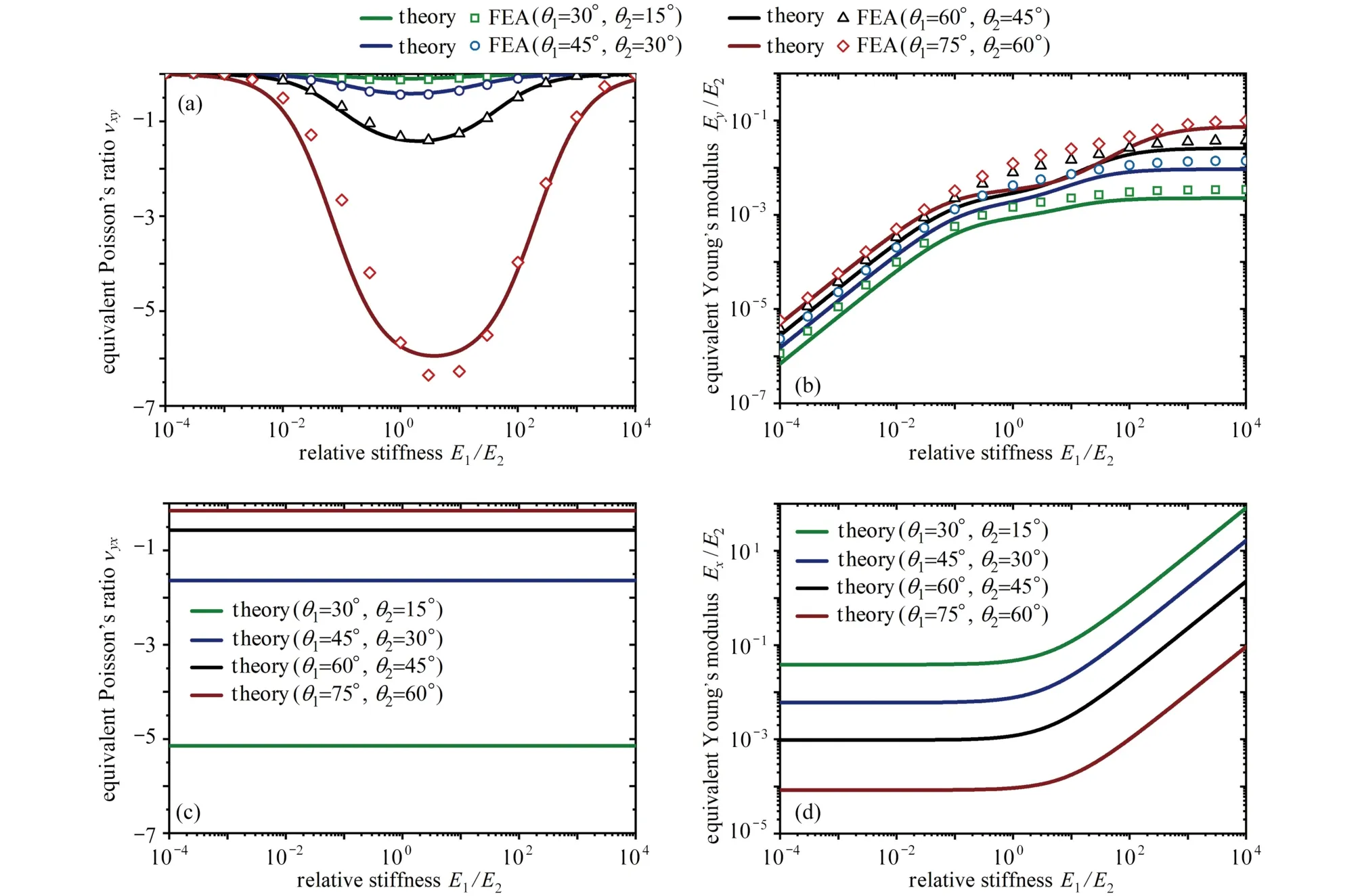
图2 组分材料相对刚度E1/E2对双材料双V 内凹结构弹性常数的影响:(a)Poisson 比ν xy与相对刚度E1/E2的函数关系;(b)弹性模量Ey/E2与相对刚度E1/E2的函数关系;(c)Poisson 比ν yx与相对刚度E1/E2的函数关系;(d)弹性模量Ex/E2与相对刚度E1/E2的函数关系Fig.2 The influence of relative stiffness E1/E2 of the constituent materials on elastic constants of bimaterial double-V structures:(a)equivalent Poisson’s ratio νxy as functions of relative stiffness E1/E2;(b)relative Young’s modulus Ey/E2 as functions of relative stiffness E1/E2;(c)equivalent Poisson’s ratio ν yx as functions of relative stiffness E1/E2;(d)relative Young’s modulus Ex/E2 as functions of relative stiffness E1/E2
通过上述分析可知,通过调整V1 和V2 杆件组分材料的相对刚度E1/E2,可以实现对双V 结构Poisson 比νxy和弹性模量Ey的调控.上述理论推导中,选择温度T为外部环境变量,即E1和E2为温度T的函数,则可以通过控制温度变化调整相对刚度E1/E2进而实现对双V 结构Poisson 比和弹性模量的调控和编程.本文选用对温度变化敏感的聚乳酸(polylactic acid,PLA)材料和对温度变化不敏感的聚碳酸酯(polycarbonate,PC)材料演示这一设计效果.通过动态热机械分析(dynamic mechanical analysis,DMA)测试得到的PLA 材料和PC 材料的储能模量与温度的关系如图1(c)所示.在室温条件下(即T=20 °C),EPC=2 207 MPa,EPLA=2 517 MPa,这两种材料表现出几乎相同的储能模量.当温度升高到T=80 °C 时,对温度变化敏感的PLA 材料的储能模量大幅降低至EPLA=3 MPa,而对温度变化不敏感的PC 材料的储能模量轻微降低至EPC=1 490 MPa,导致两种材料的储能模量相差将近三个数量级.采用这两种材料3D 打印制备了双V 型结构,其中V1 部分使用PLA 材料,V2 部分使用PC 材料.制备的双V 内凹结构试件的几何尺寸为:θ1=60°,θ2=30°,t1=t2=1.5 mm,l=15 mm,b=30 mm.
对制备的试件进行了压缩测试,试验设备为带环境温箱的万能试验机(Instron 5569).试验过程中,载荷加载速度为0.5 mm/min,温箱内温度恒定,我们利用激光引伸计记录双V 结构横向距离变化,如图1(d)所示.利用有限元分析软件ABAQUS 模拟了温度变化对双材料双V 结构Poisson 比 νxy和弹性模量Ey的影响.计算中采用平面应变模型,用CPE4 单元对所建立的有限元模型进行网格划分,通过网格收敛性研究,确定网格尺寸为0.3 mm.分析过程采用静态分析步(static general),采用通用接触,定义摩擦因数为0.3,法向采用硬接触防止单元互相穿透.
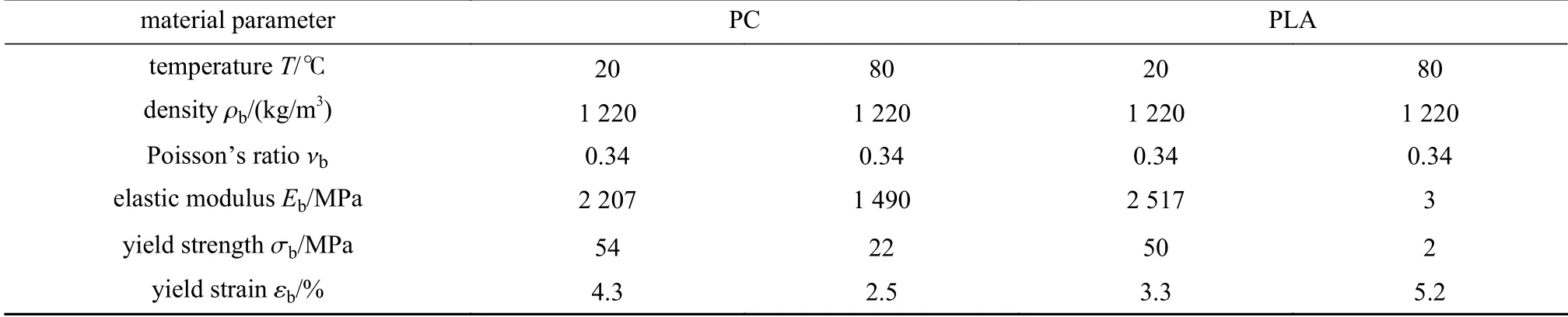
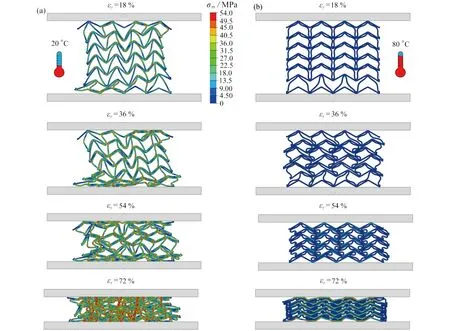
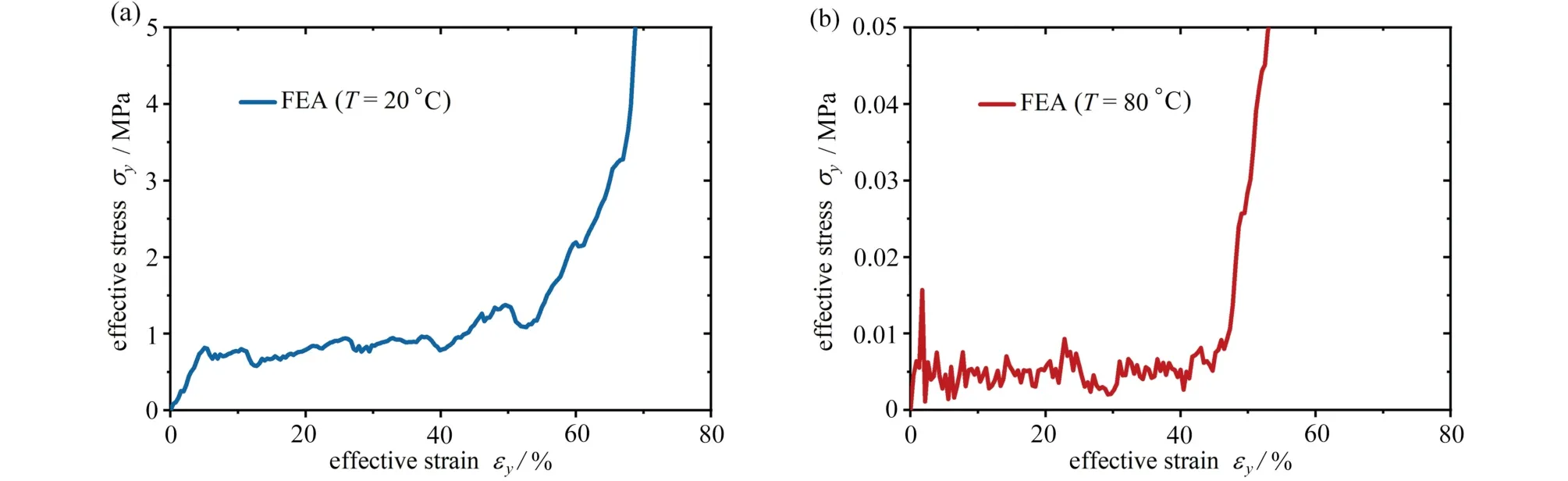
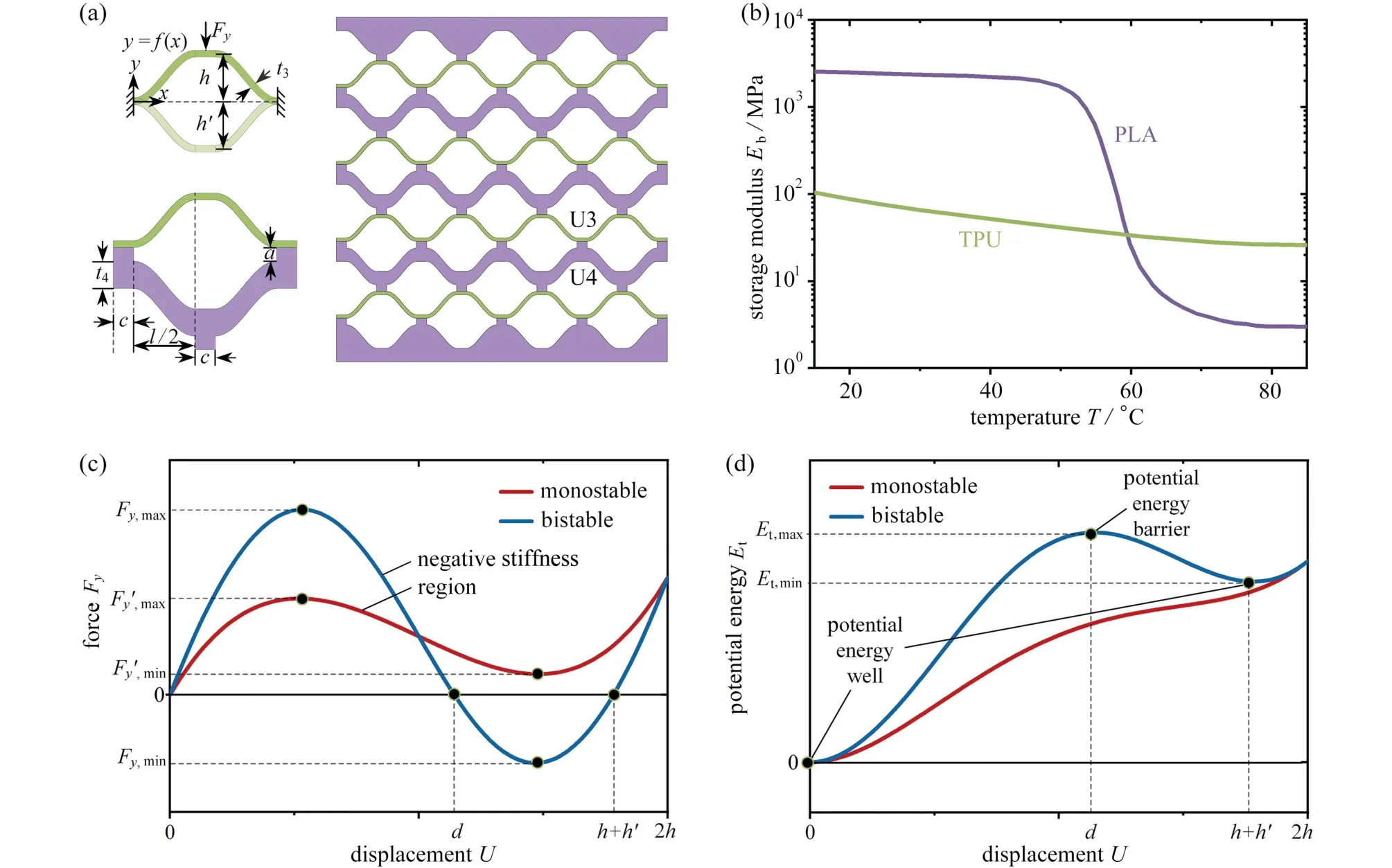
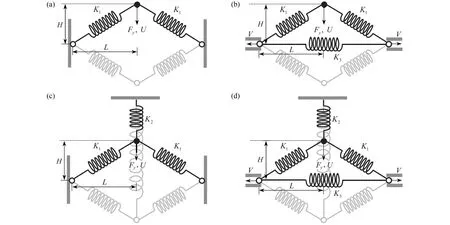
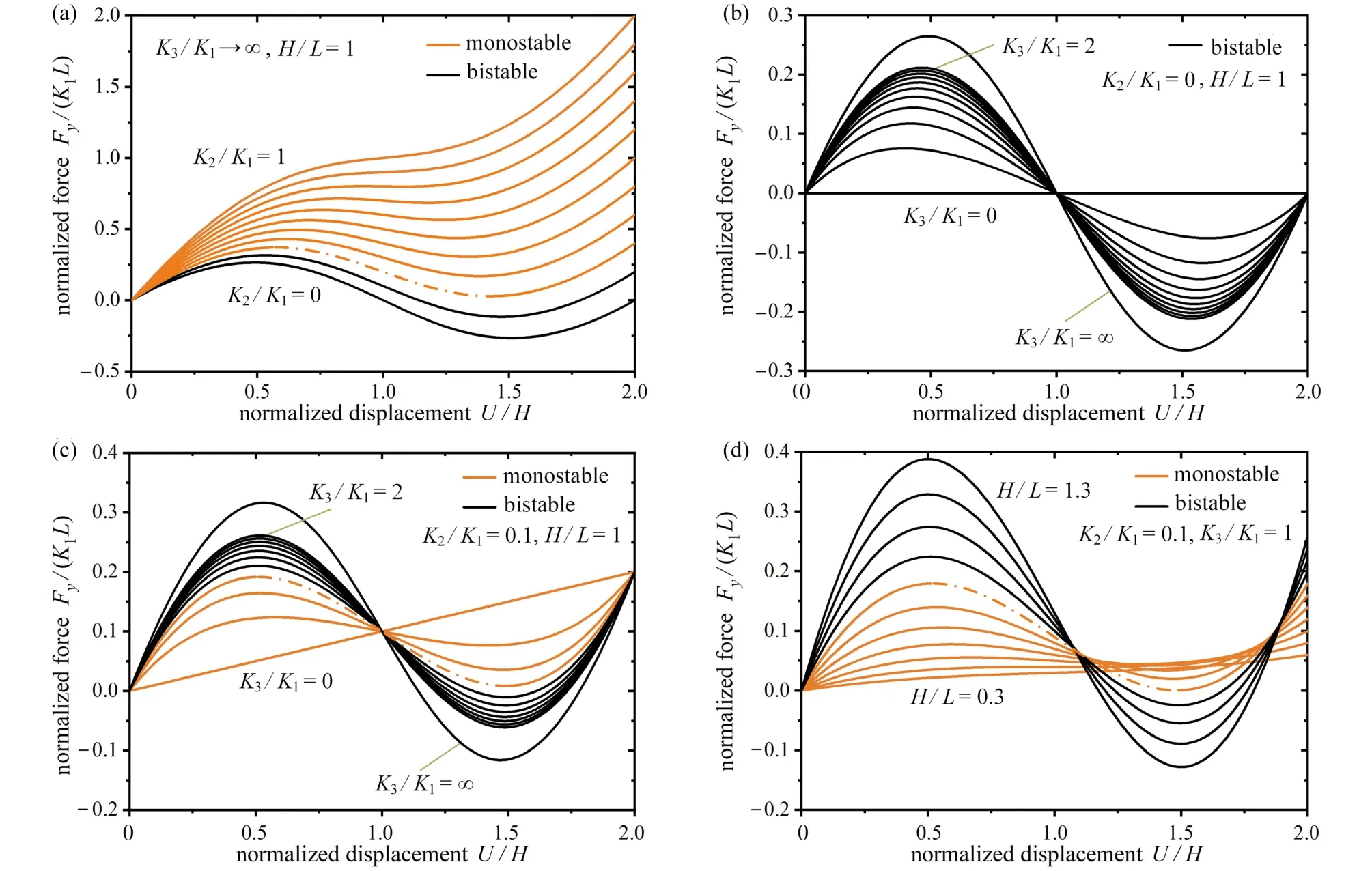
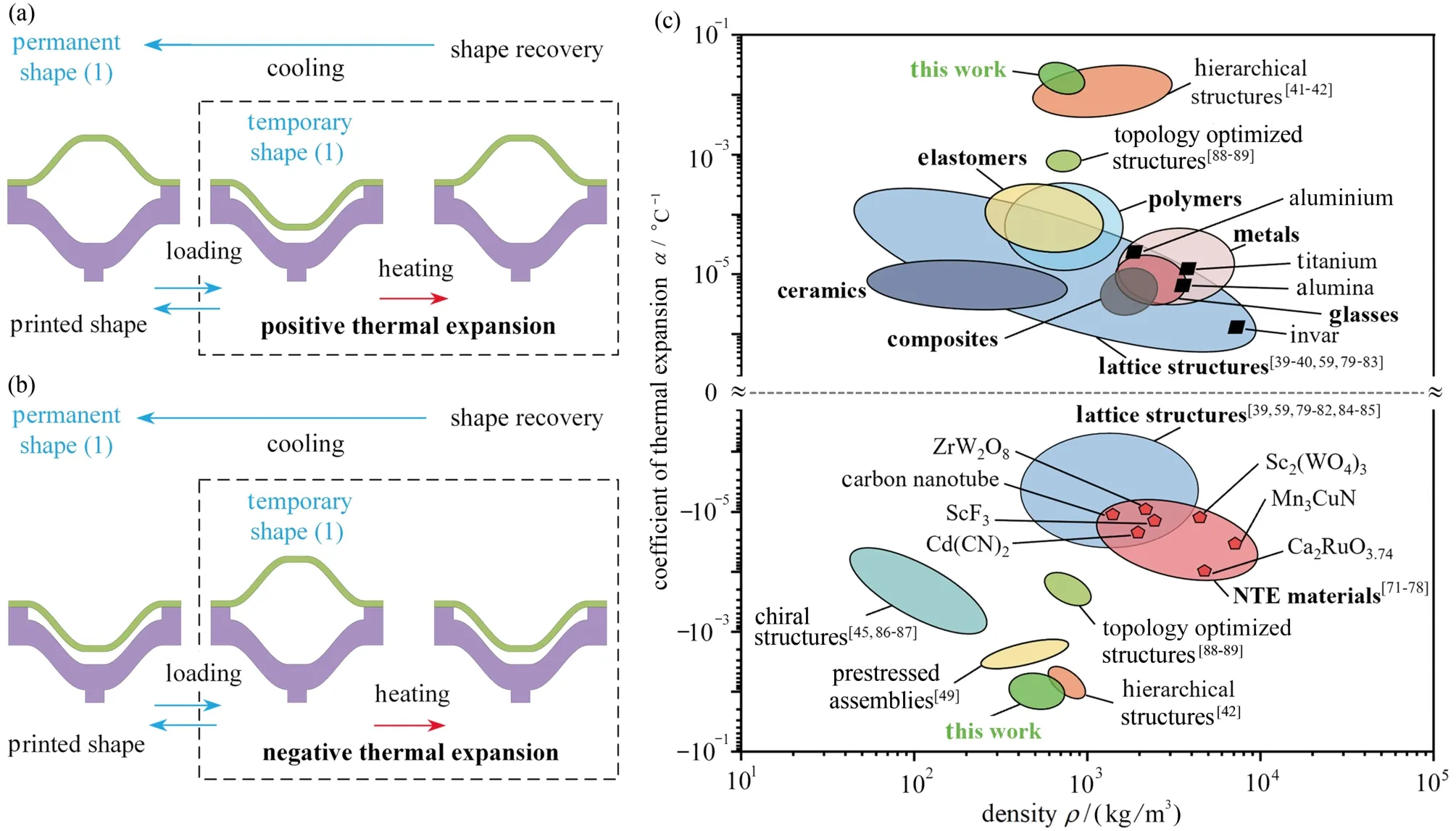
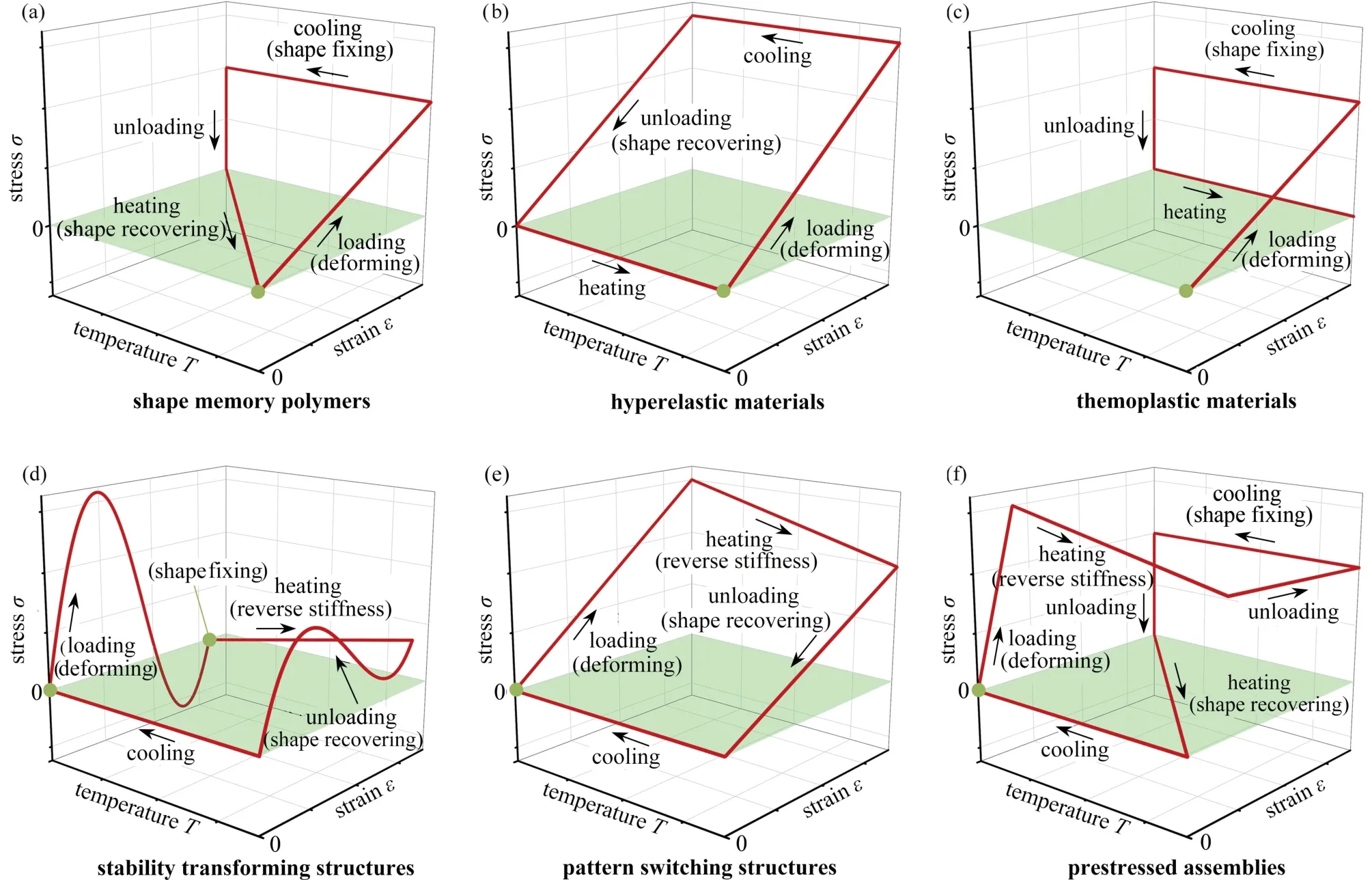
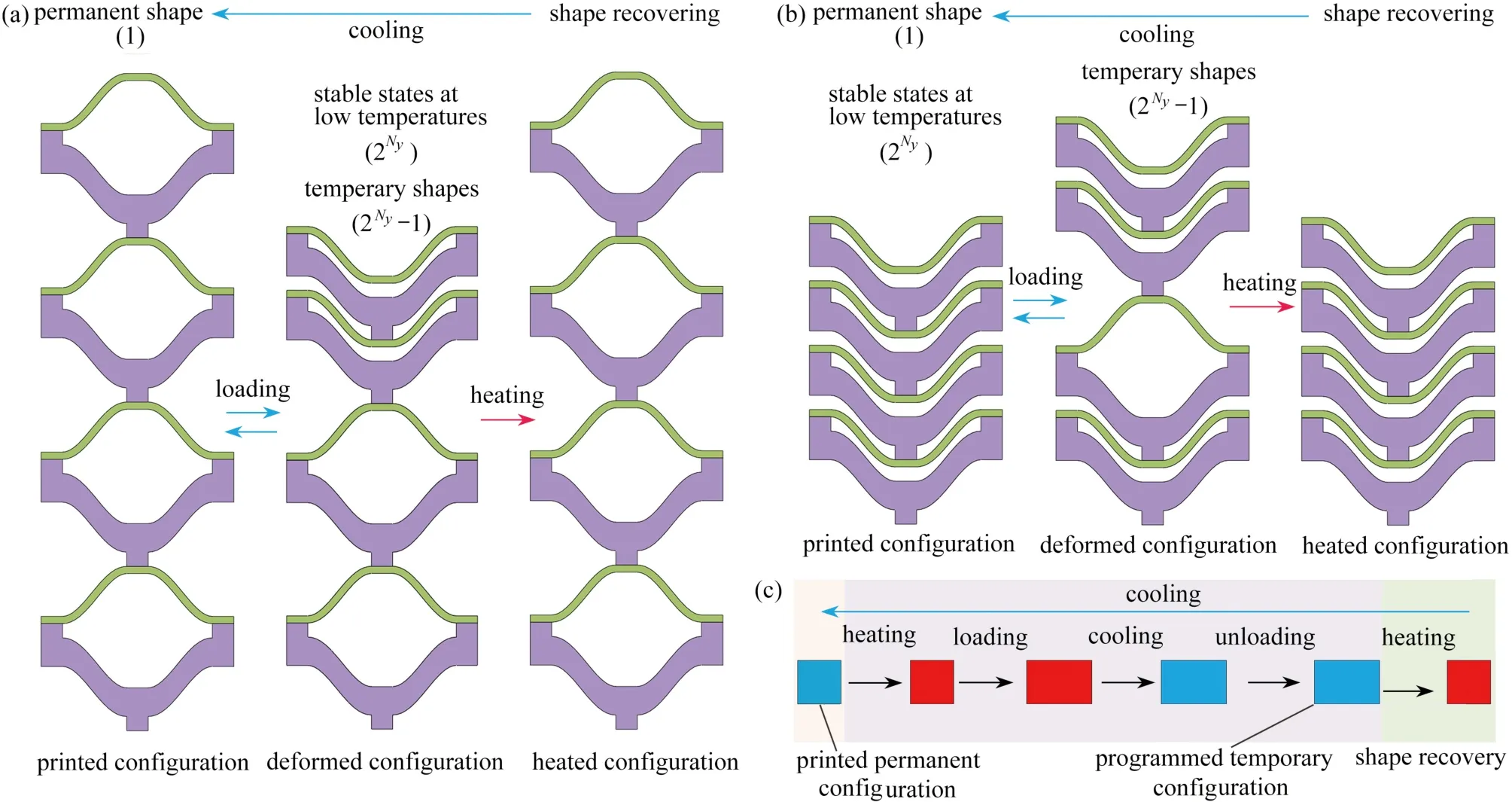
图3 给出了温度变化对双材料双V 内凹结构弹性常数的影响,双材料双V 内凹结构的Poisson 比 νxy和弹性模量Ey的理论、模拟和实验的结果对比分别如图3(c)和3(d)所示.当温度较低(T<50 °C)或较高(T>70 °C)时,组分材料PLA 和PC 的刚度变化很小,双材料双V 结构Poisson 比 νxy的值比较稳定;在50 °C 图3 温度变化对双材料双V 内凹结构弹性常数的影响:(a)低温时双V 结构在y 方向受压时的横向变形;(b)高温时双V 结构在y 方向受压时的横向变形;(c)不同温度下ν xy的理论、模拟和实验结果对比;(d)不同温度下 Ey的理论、模拟和实验结果对比Fig.3 The influences of temperatures on elastic constants of bimaterial double-V structures:(a)simulated lateral deformation for y-direction load at low temperatures;(b)simulated lateral deformation for y-direction load at high temperatures;(c)theoretical,numerical and experimental results of Poisson’s ratio ν xy as functions of temperature T;(d)theoretical,numerical and experimental results of Young’s modulus Ey as functions of temperature T 为了进一步说明通过温度变化调控双材料双V 内凹结构的力学性能,采用数值模拟研究了其在不同温度下的压溃行为.在室温(T=20 °C)和高温(T=80 °C)环境下的轴向压溃模拟过程中,有限元模型的几何参数和结构与实验样品一致,分析过程使用显式动态算法(dynamic explicit),采用具有温度相关特性的线弹性理想塑性材料模型,最小步长为1 × 10−7s−1,线性和二次黏度系数分别为0.06 和1.2.数值模拟中两种组分材料的材料参数如表1所示. 表1 有限元分析中组分材料的性能参数Table 1 Mechanical properties of constituent materials used in the finite element analysis 不同温度下双材料双V 结构准静态压溃过程的数值模拟结果如图4所示.双V 结构在压缩载荷作用下,V1 杆件承受弯矩和轴向压力,而V2 杆件承受弯矩和轴向拉力.常温下,PLA 和PC 材料的弹性模量、屈服应力和屈服应变差别很小,因此双材料双V 内凹结构的压溃变形模式与单一材料双V 结构的变形模式一致,先横向向内收缩再横向向外扩张,如图4(a)所示.然而在高温下,PLA 材料的弹性模量迅速降低大约三个数量级,屈服强度降低大约一个数量级,而PC 材料的弹性模量和屈服强度只降低到大约原来的一半.因此,双材料双V 结构在高温下表现为V1 杆件的压曲变形,在较大的应变下依然保持零Poisson 比,整体变形规则有序,如图4(b)所示.由于负Poisson 比结构在受压时的质量集中效应,双材料双V 结构在常温下的应力-应变曲线没有明显的平台应力阶段,应力水平随名义应变的增加逐渐提升.而在高温下,双材料双V 结构在较大的应变下依然保持零Poisson 比,V1 杆件的压曲失稳变形使得应力-应变曲线抖动剧烈,在V1 杆件压至与V2 杆件接触后,再继续加载导致应力水平迅速提升,如图5(a)和5(b)所示. 图4 温度变化对双材料双V 结构变形模式的影响:(a)低温时双V 结构在y 方向的压溃过程;(b)高温时双V 结构在y 方向的压溃过程Fig.4 The influences of temperatures on deformation modes of bimaterial double-V structures:(a)simulated crushing process for y-direction load at a low temperature;(b)simulated crushing process for y-direction load at a high temperature 图5 温度变化对双材料双V 结构应力-应变响应的影响:(a)低温时双V 结构在y 方向压溃时的应力-应变曲线;(b)高温时双V 结构在y 方向压溃时的应力-应变曲线Fig.5 The influence of temperature on stress-strain response of bimaterial double-V structures:(a)numerical results of stress-strain curve for y-direction load at low temperature;(b)numerical results of stress-strain curve for y-direction load at high temperature 基于弹性跳变机制的双、多稳态结构具有形状重构功能,也是机械超材料研究领域的热点.压曲梁和原曲梁是研究最广泛的跳变单元,传统的单材料双、多稳态结构采用较厚的支撑部分为跳变部分提供两端的约束,导致单材料多稳态结构的材料利用率很低.而且单材料多稳态结构的形状重构需要通过施加外部载荷实现,不具有智能响应机制,如图6所示.以双U 多稳态结构为例[61-70],单材料双U 结构的双、多稳态机制由弹性跳变部分和支撑部分的几何参数决定.而如图6(a)所示,双材料双U 结构的弹性跳变部分由另一种材料制成的支撑部分提供两端的约束,其双、多稳态机制由两种材料的相对刚度和几何参数共同决定.因此,和双材料双V 结构类似,当两种材料的刚度对温度有不同的依赖性时,就可以通过温度变化控制两种材料的相对刚度,进而实现对双材料双U 结构稳定性的调控和编程. 如图6(a)所示,双U 结构的单元由构件U3 和U4 组成.图中绿色标记部分为U3,弹性模量为E3,密度为ρ3,紫色标记部分为U4,弹性模量为E4,密度为 ρ4.几何参数如下:U3 跳变曲梁中心线的垂直投影高度和水平投影长度分别为h和l/2,面内厚度为t3;U4 支撑梁面内厚度为t4,连接平台的宽度为c,厚度为a.三角函数y=h/2×[1−cos(2πx/l)]在区域[−l/2,0]内的函数曲线作为原曲梁U3 中心线的曲线形式,面外厚度为b. 之前的研究表明[61-70],当弹性跳变梁U3 两端被完全约束时,通过合理地调整其几何参数t3/l和h/l,在竖直载荷Fy作用下,弹性梁U3 可以跳变到第二个稳态构型,此时跳变曲梁中心线的垂直投影高度为h'(h' 图6 双材料双U 跳变结构:(a)双材料双U 结构及单元几何参数示意图;(b)PLA 和TPU 材料的储能模量与温度的关系;(c)单稳态和双稳态单元的力-位移曲线示意图;(d)单稳态和双稳态单元的势能-位移曲线示意图Fig.6 Bimaterial double-U snapping structures:(a)schematic diagram of bimaterial double-U structures and geometric parameters of the unit cell;(b)storage modulus Eb vs.temperature T for PLA and TPU;(c)force-displacement curves of the monostable and bistable unit cells;(d)potential energydisplacement curves of the monostable and bistable unit cells 为了更简洁地解释支撑梁和跳变梁相对刚度E4/E3对双U 结构稳定性的影响,本文研究了与其具有相同跳变机制的von Mises 桁架模型[61-70].图7 给出了von Mises 桁架模型的系统稳定性分析.最简单的von Mises 桁架如图7(a)所示,两个具有刚度K1和原始长度S0的线弹性弹簧,其端部为销连接,在其自然状态下与水平面成非零角度倾斜.为了给系统提供惯性,在弹簧相交的地方放置一个点质量M,并限制点质量仅在垂直方向上移动.最简单的von Mises 桁架具有完全对称的双稳态,因为高亮显示和轻度着色的平衡态相对于水平轴具有对称性.这种完全对称的双稳态机制与压曲梁具有相同的力学表现.当竖直外力Fy作用于点质量时,图7(a)所述保守系统的总势能由弹性势能Et和外力势能W组成: 系统的力和位移的关系为 然而,将一定刚度的附加线弹性弹簧K2垂直连接到点质量上时,轻度阴影区域不再是稳定平衡位置,如图7(c)所示.这样,取决于相对刚度K2/K1和无量纲几何参数H/L,三个相连的线弹性弹簧具有单稳态或者不对称双稳态.该系统与斜直梁、原曲梁和轴对称壳体等具有相同的力学表现,可以用来解释其跳变机制.图7(c)所述系统的弹性势能由下式给出: 图7 Von Mises 桁架模型的系统稳定性分析:(a)两端完全约束的对称双稳态系统;(b)两端不完全约束的对称双稳态系统;(c)两端完全约束并加上竖直弹簧的非对称双稳态或单稳态系统;(d)两端不完全约束并加上竖直弹簧的非对称双稳态或单稳态系统Fig.7 System stability analysis of von Mises truss models:(a)the symmetric bistable system with complete constraints at both ends;(b)the symmetric bistable system with incomplete constraints at both ends;(c)the asymmetric bistable or monostable system with a vertical spring and complete constraints at both ends;(d)the asymmetric bistable or monostable system with a vertical spring and incomplete constraints at both ends 系统的力和位移的关系为 在周期性的整体结构中,跳变部分末端的约束由支撑段提供,不能形成完全固定的边界条件.因此,需要使用如图7(b)和7(d)所示的具有刚度K3的水平线弹性弹簧,来替换如图7(a)和7(c)所示横向完全约束的边界,并模拟结构的横向扩张和收缩阻力.图7(b)所述系统的弹性势能由下式给出: 图7(d)所述系统的弹性势能由下式给出: 图7(b)和7(d)所示系统的力和位移的关系可以通过求解下列方程给出: 通过对上述桁架系统的分析,整理总结von Mises 桁架模型的力-位移响应规律如图8所示.图中实线-虚线-实线的橙色线为单稳态和双稳态的分界线,该橙色线虚线部分表示负增量刚度阶段,实线部分表示正增量刚度阶段.竖直弹簧K2的作用体现在:当K2/K1=0时,桁架相对于水平轴对称,为对称双稳态系统,因此其力-位移曲线相对于零力点(U/H=1,0)中心对称,零力点(U/H=1,0)出现在当两个弹簧都水平的时刻,如图8(b)所示;当K2/K1>0时,竖直弹簧K2在变形过程中存储了额外的弹性变形能,因此系统的对称性被破坏,零力点被转移到具有更高位移的位置.如图8(a)所示,随着K2/K1逐渐增加,曲线逐渐提升,并在大于某一特定值时与零力水平线(Fy=0)不再相交,桁架从双稳态系统变为单稳态系统.随着K2/K1进一步增加,单稳态系统的力-位移曲线从正增量刚度-负增量刚度-正增量刚度的非单调函数变为正增量刚度的单调函数,而双稳态系统的力-位移曲线始终保持从正增量刚度-负增量刚度-正增量刚度的非单调函数.水平弹簧K3的作用体现在:当K2/K1=0时,对称双稳态系统力-位移曲线的最大值随着K3/K1的增加而不断增加,但是增幅越来越小,如图8(b)所示,其中K3/K1→∞对应横向完全约束时的极限曲线;当K2/K1>0时,双稳态系统力-位移曲线的最大值随着K3/K1的增加而不断增加,但是增幅越来越小,并在大于某一特定值时与零力水平线不再相交,桁架从不对称双稳态系统变为单稳态系统.随着K3/K1进一步增加,单稳态系统的力-位移曲线从正增量刚度-负增量刚度-正增量刚度的非单调函数变为正增量刚度的单调函数,如图8(c)所示,其中K3/K1→∞对应横向完全约束时的极限曲线,并且曲线均相对于非零力点(U/H=1,K2/K1)中心对称.几何参数H/L的作用体现在:当K2/K1=0时,对称双稳态系统力-位移曲线的最大值随着H/L增加而不断增加;当K2/K1>0时,随着H/L不断增加,单稳态系统的力-位移曲线从正增量刚度的单调函数变为正增量刚度-负增量刚度-正增量刚度的非单调函数,随着H/L再次增加,负力(Fy<0)出现,桁架从单稳态系统变为不对称双稳态系统.并且非对称系统的力-位移曲线的最大值的增加速度比最小值的减少速度快,如图8(d)所示. 图8 Von Mises 桁架模型的力-位移响应:(a)K3/K1 →∞且H/L=1时,K2/K1 对系统力-位移曲线的影响;(b)K2/K1=0且 H/L=1时,K3/K1对系统力-位移曲线的影响;(c)K2/K1=0.1且 H/L=1时,K3/K1对系统力-位移曲线的影响;(d)K2/K1=0.1且K3/K1=1时,H/L对系统力-位移曲线的影响Fig.8 The force-displacement responses of von Mises truss models:(a)the influence of K2/K1 on the force-displacement curves of the system for K3/K1 →∞and H/L=1;(b)the influence of K3/K1 on the force-displacement curves of the system for K2/K1=0 and H/L=1;(c)the influence of K3/K1 on the force-displacement curves of the system for K2/K1=0.1 and H/L=1;(d)the influence of H/L on the force-displacement curves of the system for K2/K1=0.1 and K3/K1=1 由于双材料双U 结构与图7(d)所示桁架系统的力学行为的机制相同,将t3/l类比于K2/K1,将h/l类比于H/L,将(E4I4)/(E3I3)类比于K3/K1.通过分析图7(d)所示桁架系统的跳变机制,可以说明如何通过控制支撑梁U4 和跳变梁U3 的相对刚度E4/E3改变双材料双U 结构的稳定性.如图8(c)所示,在保持K2/K1=0.1,H/L=1不变的情况下,当桁架两端完全固定约束(K3/K1=∞)时,力-位移曲线为正增量刚度-负增量刚度-正增量刚度的非单调函数,有负力出现,为非对称的双稳态系统;当横向弹簧的刚度减小到K3/K1=0.4时,力-位移曲线为正增量刚度-负增量刚度-正增量刚度的非单调函数,没有负力出现,为非对称的单稳态系统;当横向弹簧的刚度减小到K3/K1=0时,力-位移曲线为正增量刚度的单调函数,无负增量刚度阶段.通过上述分析可知,通过外部激励调整组成支撑梁U4 和跳变梁U3 的组分材料的相对刚度E4/E3可以实现对双U 结构单元稳定性的调控.本文选用对温度变化敏感的PLA 材料和对温度变化不敏感的热塑性聚氨酯(thermoplastic polyurethane,TPU)材料,结合多材料3D 打印技术,通过控制温度变化调整相对刚度E4/E3进而实现对双U 结构稳定性的调控和编程. 使用FDM 3D 打印机制备了双材料双U 结构,双U 整体结构的U3 部分使用TPU 材料,U4 部分使用PLA 材料进行打印.制备的双U 结构试件的几何尺寸为:h=7 mm,l=18 mm,t3=1.0 mm,t4=4 mm,c=3 mm,a=2 mm,b=30 mm.通过DMA 测试得到的TPU 材料(绿线)和PLA 材料(紫线)储能模量与温度的关系如图6(b)所示.由于室温下(T=20 °C)两种材料的储能模量为ETPU=87 MPa,EPLA=2 517 MPa,跳变梁U3 的两端几乎被支撑梁U4 完全约束,使双U 结构具有双稳态单元;当升高温度到T=80 °C 时,两种材料的储能模量为ETPU=26 MPa,EPLA=3 MPa,支撑梁U4 无法继续为跳变梁U3 的两端提供足够的横向约束,使得室温下的双稳态单元转变为高温下的单稳态单元. 打印的完全展开和完全闭合的两个双U 结构在室温(T=20 °C)下通过外力作用(手动压缩和拉伸)实现形状重构,再将变形后的临时稳定结构加热(放入T=80 °C 的热水中)实现形状恢复,整个恢复过程用时30 s,其实验过程如图9(a)和9(b)所示.双U 结构在加热恢复过程中会有很大的热变形:当初始结构的单元是外凸构型时,加热过程中会出现正的热膨胀,如图10(a)所示;相反,当初始结构的单元是内凹构型时,加热过程中会出现负的热膨胀,如图10(b)所示.从常温(T=20 °C)加热到高温(T=80 °C),初始外凸双U 结构的等效正热膨胀系数和初始内凹双U 结构的等效负热膨胀系数与已知文献中的材料和结构的实验结果对比如图10(c)所示,如天然材料[42,59]、负热膨胀材料[71-78]、传统点阵结构[79-85]、手性结构[45,86-87]、拓扑优化结构[88-89]、多级结构[41-42]、预应力装配体[49].可以看出,双U 结构比已知文献中的材料和结构具有更大的正热膨胀系数(αmax=0.03°C−1)和更小的负热膨胀系数(αmin=−0.01°C−1). 图9 双U 结构的形状重构和恢复的实验过程:(a)初始完全展开的双U 结构的形状重构和恢复过程;(b)初始完全闭合的双U 结构的形状重构和恢复过程Fig.9 Experimental processes of shape reconfiguration and recovery of double-U structures:(a)shape reconfiguration and recovery of initial double-U structure with fully expanded configuration;(b)shape reconfiguration and recovery of initial double-U structure with fully contracted configuration 图10 双材料双U 结构在加热恢复过程中的热变形及热膨胀系数:(a)初始外凸单元加热恢复过程中的正热膨胀变形;(b)初始内凹单元加热恢复过程中的负热膨胀变形;(c)双U 结构在加热恢复过程中的热膨胀系数与已知文献中的材料和结构的实验结果对比Fig.10 Thermal deformations and thermal expansion coefficients of bimaterial double-U structures during heating recovery:(a)the positive thermal expansion of an initial convex unit cell during heating recovery;(b)the negative thermal expansion of an initial concave unit cell during heating recovery;(c)the thermal expansion coefficients of bimaterial double-U structures during heating recovery compared with the experimental results of materials and structures reported previously 为了更好地将本文的双材料双U 结构与其他不同材料和结构的热力学行为进行对比,我们绘制了热力循环ε-T-σ示意图.形状记忆聚合物的ε-T-σ如图11(a)所示[90-94].高温下在外载荷作用时形状记忆聚合物产生变形,维持外载荷不变的情况下冷却到低温,形状记忆聚合物形状固定,之后卸掉外载荷,其在低温下保持临时形状不变,升温后形状记忆聚合物材料在没有外载荷的情况下逐渐恢复到初始的永久形状.作为对比,高温下超弹性材料在外载荷作用下产生变形,维持外载荷不变的情况下冷却到低温,之后卸掉外载荷,其在低温下不能保持临时形状不变,卸载后直接回到初始形状,有弹性恢复没有形状固定,其ε-T-σ如图11(b)所示.而高温下热塑性材料在外载荷作用下产生变形,维持外载荷不变的情况下冷却到低温,热塑性材料形状固定,之后卸掉外载荷,其在低温下保持临时形状不变,升温后热塑性材料在没有外载荷的情况下依旧保持变形后的形状,不能恢复到初始形状,有形状固定没有形状恢复,其ε-T-σ如图11(c)所示.本文通过分析跳变机制,通过温度控制支撑部分对跳变部分的约束力,在低温下可以使双稳态单元在不同稳态构型之间通过外载荷作用进行跳变,通过势能阱锁定结构的临时形状.在升温时,由于支撑部分的刚度急剧降低,不能提供维持跳变部分临时形状的横向约束力,使弹性跳变部分变为单稳态自恢复状态,通过弹性恢复力实现跳变部分的形状恢复,而支撑部分的变形由形状记忆聚合物的形状记忆效应实现形状恢复,其ε-T-σ如图11(d)所示.为了进一步说明本文的稳定性转换双U 结构的优势,选取模式转换结构和预应力装配体进行对比[48-49].如图11(e)所示,低温下模式转换结构在外载荷作用下发生变形,升温后,由于两种材料的刚度反转效应,变形模式发生转换.如果卸掉外载荷,结构可以通过弹性材料的弹性恢复力和形状记忆聚合物的形状记忆效应实现形状恢复,降温回到初始状态.但是这种结构设计无法提供形状固定的机制,没有形状重构功能.而预应力装配体需要经过低温下组装-升温变形-降温形状固定-拆卸-升温形状恢复(形状记忆聚合物的形状记忆效应)-降温一系列非常复杂的热力过程才能实现形状重构,如图11(f)所示. 图11 不同材料和结构的热力循环ε-T-σ示意图:(a)形状记忆聚合物ε-T-σ示意图[90-94];(b)超弹性材料ε-T-σ示意图;(c)热塑性材料ε-T-σ示意图;(d)稳定性转换双U 结构单元ε-T-σ示意图;(e)模式切换结构ε-T-σ示意图[48];(f)预应力装配体ε-T-σ示意图[49]Fig.11 The ε-T-σ diagrams of the thermomechanical cycle for different materials and structures:(a)the ε-T-σ diagram of shape memory polymers[90-94];(b)the ε-T-σ diagram of hyperelastic materials;(c)the ε-T-σ diagram of themoplastic materials;(d)the ε-T-σ diagram of the unit cell of stability transforming double-U structures;(e)the ε-T-σ diagram of the pattern switching structures[48];(f)the ε-T-σ diagram of the prestressed assemblies[49] 由Ny个双稳态单元串联而成的双材料双U 结构如图12(a)和12(b)所示,每一个结构在常温下有 2Ny个稳态构型.其中初始构型是其永久形状,剩下的2Ny−1个稳态构型为临时形状,稳态构型在常温下可以通过力加载任意切换,升温后均回到初始永久形状.相比如图12(c)所示形状记忆材料,稳定性转换双U 结构的形状重构不需要复杂的编程过程,在极大的应变下依然能恢复到初始形状,并且能反复循环使用,表现出远超形状记忆合金和聚合物的超弹性和形状记忆效应. 图12 稳定性转换双U 结构的形状重构和变形恢复机制:(a)初始完全展开的双U 结构的形状重构和恢复机制;(b)初始完全闭合的双U 结构的形状重构和恢复机制;(c)形状记忆聚合物的形状重构和变形恢复机制Fig.12 The shape reconfiguration and recovery mechanism of the stability transforming double-U structures:(a)the shape reconfiguration and recovery mechanism of initial structures with fully expanded configurations;(b)the shape reconfiguration and recovery mechanism of initial structures with fully contracted configurations;(c)the shape reconfiguration and recovery mechanism of shape memory polymers 本文针对目前智能材料和结构激励-响应机制复杂、制备困难等缺点,采用了具有不同玻璃化转变温度和温度依赖性的多种聚合物材料,结合多材料3D 打印技术对材料的空间分布进行合理设计,提出了一类具有热可编程力学响应能力的多材料点阵结构,并研究了其力学行为.设计的双材料双V 结构可通过温度变化实现对其等效弹性常数和压溃响应的调控和编程.双材料双U 结构可以通过简单的热力控制实现形状重构和形状恢复功能,表现出了极大的热变形、超弹性和形状记忆效应.本文提出的具有热可编程力学响应能力的多材料点阵结构的设计、分析和验证方案可以很容易地扩展到调控点阵结构的其他性能和响应其他环境刺励,为设计和制造自适应保护装备、生物医学设备、航空航天领域的变形结构、柔性电子设备、自组装结构和可变形软体机器人等开辟了新途径.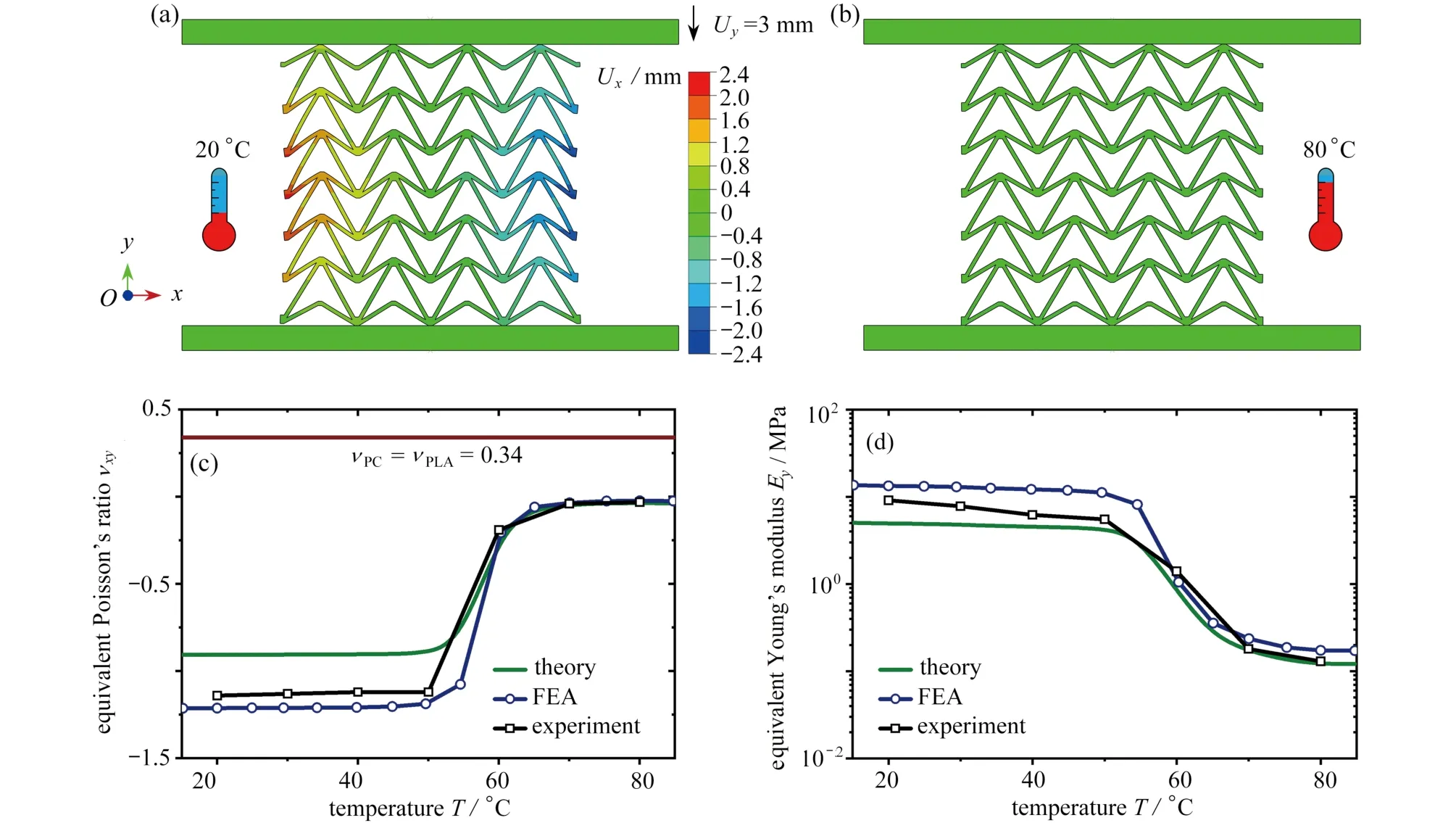
2 热可调结构稳定性








3 结论
