动物运动原理演示模型
2022-06-14长沙市长郡芙蓉中学陈水章陕西省榆林学院陈鑫
◎长沙市长郡芙蓉中学 陈水章 陕西省榆林学院 陈鑫
一、研究背景
人教版生物八年级上册《动物的运动》一课中,以哺乳动物为例,介绍了动物运动系统的组成及功能。
骨本身是不能运动的,骨的运动要靠骨骼肌牵拉,即骨的位置变化产生运动。骨骼肌受神经刺激而收缩,牵动骨绕关节活动,身体相应的部位就会产生运动。
由于骨骼肌只能牵拉骨使其改变位置,而不能将骨复位,因此骨的复位要靠另一组骨骼肌的收缩牵拉,可见一个动作至少要两组及以上肌肉的配合才能完成。
目前教学普遍使用的模型如图1,有的老师在演示时通过推动骨使其绕关节转动,让代表一侧肌肉的橡皮筋缩短,代表另一侧肌肉的橡皮筋伸长。这种演示方法与动物运动原理不符,容易让学生形成错误的认识。因此,我们设计了一个动物运动原理演示模型,帮助学生准确理解运动的原理。

图1 目前普遍使用的模型
二、设计思路
本模型按照动物运动的原理,利用继电器模块设计出模拟人脑的控制电路板,用电路板模拟人脑发出指令,控制两组模拟骨骼肌的电机丝杆装置。通过控制电流的正、反方向,实现电机丝杆装置的正转与反转,从而使丝杆上的滑块向上或向下移动,模拟骨骼肌收缩与舒张的变化。装置结构如图2。
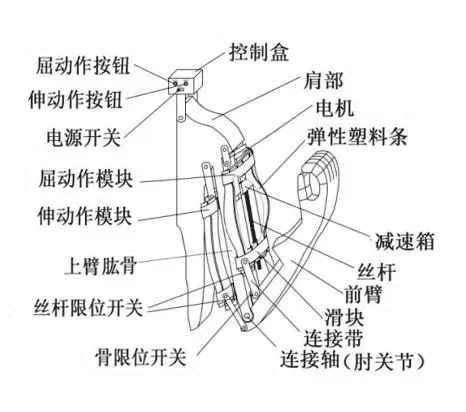
图2 装置结构图
当模拟屈肘动作时,按下屈动作按钮,屈动作的电机丝杆装置正向转动,滑块向上滑动;伸动作的电机丝杆装置反向转动,滑块向下滑动。滑块通过连接带牵拉模拟前臂骨的装置绕着模拟肘关节的支点运动,完成屈肘运动。模拟伸肘动作时则相反。
用弹性塑料条模拟伸、屈肘动作能形象地展现肌肉收缩与舒张的变化关系。当模拟骨骼肌收缩时,弹性塑料条受到挤压,中间便拱起,说明骨骼肌收缩时体积增大。当模拟骨骼肌舒张时,弹性塑料条受到拉伸,中间原本拱起的部分逐渐变小,说明骨骼肌舒张时体积变小。
三、制作过程
1.加工模拟骨的板材与控制盒
设定模拟骨与控制盒的大小和形状,先在电脑上用绘图软件画出控制盒外壳的尺寸图和模拟骨材料的尺寸图(如图3),用激光切割机将亚克力板切割成制作模拟骨的板材和控制盒的材料。撕掉两面的保护膜,并用三氯甲烷(亚克力胶)粘好控制盒。

图3 在电脑上设计模拟骨材料的尺寸
2.制作模拟骨骼肌的伸缩装置
购买12 V 600转的微型电机丝杆装置,利用不锈钢方管制作模拟骨骼肌的滑块与滑槽,将电机丝杆装置固定在不锈钢方管的滑槽内,把滑块上的螺母套在丝杆上,当丝杆转动时,滑块能在滑槽内滑动。然后在滑槽两端分别固定一块半圆形的尼龙块(如图4)。
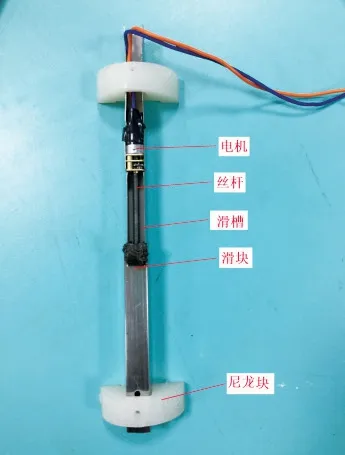
图4 模拟骨骼肌的伸缩装置
用激光切割机将塑料盒切成宽1 cm、长30 cm的塑料条,将塑料条喷上红色油漆,把塑料条纵向重叠一半排列后,平铺在两块半圆形尼龙块两端的圆弧上,并用压条固定(如图5)。

图5 模拟骨骼收缩的弹性塑料条
3.制作控制器
在控制盒内安装18650充电电池、电源开关、屈动作按钮、伸动作按钮、控制电机正反转的遥控模块、扬声器、多路触发MP3语音播放器模块、两路双联高电平触发继电器,将装置各部分的电路连接(如图6)。

图6 将装置各部分的电路连接
4.组装
将模拟前臂与上臂的亚克力板材用螺栓连接,模拟肘关节。将控制盒安装在肩部上端,用背带做成连接带。用铜丝将模拟骨骼肌的伸缩装置(屈动作模块和伸动作模块)的上端连接到模拟肩部(肩胛骨)与上臂肱骨的上端,其下端连接到模拟前臂(桡骨和尺骨)上,装置便制作完成了。
5.性能测试
打开电源开关进行性能测试。触发屈动作按钮,播放器播放:“现在模拟屈肘动作,肱二头肌收缩,肱三头肌舒张,牵拉前臂骨绕肘关节向上运动,肘部弯曲。”此时模拟肱二头肌的弹性塑料条逐渐拱起,体积变大,牵动前臂骨绕肘关节向上运动,同时模拟肱三头肌的弹性塑料条舒张,体积变小,完成屈肘动作(如图7)。

图7 触发屈动作按钮后装置的状态
而触发伸动作按钮时,播放器播放:“现在模拟伸肘动作,肱三头肌收缩,肱二头肌舒张,牵拉前臂骨绕肘关节向下运动,肘部伸展。”此时模拟肱二头肌的弹性塑料条舒展,体积变小,牵动前臂骨绕肘关节向下运动,同时模拟肱三头肌的弹性塑料条收缩拱起,体积变大,完成伸肘动作(如图8)。

图8 触发伸动作按钮后装置的状态
四、创新点
1.准确新颖。本模型针对原教具容易让人误解的问题,通过人工智能模拟人脑发出信号,控制模拟骨骼肌的装置产生收缩与舒张的反应。这种演示原理与动物运动原理是一致的,具有一定的创新性,能帮助学生形成正确的认知。
2.形象直观。本模型通过弹性塑料条的变化模拟骨骼肌在收缩时体积增大、舒张时体积缩小的现象,形象生动,便于学生观察与理解。
3.操作简便。只需要触发控制盒上的屈动作按钮与伸动作按钮就能演示相应的动作。
4.学科融合。将人工智能技术与生物、物理等学科进行深度融合,综合运用多学科知识,为生物学科开展STEAM教育提供了参考。
