考虑车辆运动学特征的无人集卡充电策略及充电桩分配研究*
2022-06-11陈培周昆张煜尹星
陈 培 周 昆 张 煜 尹 星
1天津港第二集装箱码头有限公司 天津 120000 2武汉理工大学 交通与物流工程学院 武汉 430063 3武汉理工大学韶关研究院 韶关 512100
0 引言
近年来,建设智能高效、生态友好型码头,已经成为了国内外大型港口的主流发展方向。我国北方某重要国际贸易大港新建的全自动化集装箱码头采用电力方式驱动港区设备,利用智能控制技术实现作业设备的自动运行,如水平运输系统利用纯电动无人集卡代替传统码头的燃油集卡,具有高效智能、经济环保的优势,有助于码头实现高效作业。
国内外关于自动化码头水平运输系统的研究,大多集中在运输车辆的作业分配和路径优化方面,Lou J B等[1]提出了双回路策略,用于求解自动化集装箱码头AGV路径规划问题,并通过数值实验评估验证了算法的有效性;黄泽乾等[2]探讨了AGV数量和作业时间之间的关系,通过模拟自动化集装箱码头卸船过程,验证了模型的有效性;程聪聪等[3]提出了一种带AGV伴侣的集装箱港口工艺,有效提高了港口装卸设备的协调作业能力,减少了车辆等待时间。
除此之外,车辆充电过程对AGV整体调度有显著影响,研究人员对此类问题也进行了许多研究,如陈珲等[4]建立了考虑充电因素的AGV调度模型,设计了4种充电方式,提出按需充电方式可有效提高充电效率;周小凡等[5]综合考虑AGV充电时间和排队等待时间,建立了以最小化任务时间为目标的AGV调度模型,结果表明多频次充电方式可保持车辆较高的电量水平;张亚琦等[6]构建了考虑充电过程的AGV管控模型,并通过实际案例验证了该模型的有效性。
由上述可知,在自动化码头水平运输设备的研究领域中,对无人集卡的充电管理研究一直较少。无人集卡由电力驱动,其电量水平直接影响车辆的续航能力,同时充电桩位置直接影响无人集卡充电调度策略,故车辆充电策略及充电桩位置对码头装卸作业效率影响很大。本文在考虑无人集卡运动学特征的基础上,对其充电策略及充电桩分配展开研究,以缩短无人集卡充电时间,提高充电效率。
1 问题描述
图1为某港区C段自动化码头的整体布局,其中堆场平行于码头岸线布置,自动充电桩布置在码头右侧A场和左侧C场与岸边集装箱起重机(以下简称岸桥)作业区之间的无人集卡车道上。
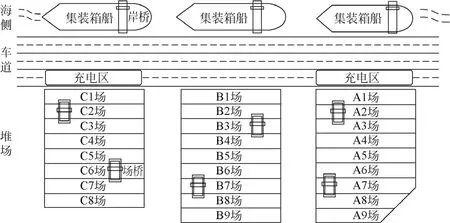
图1 码头平面布局图
在码头装卸船作业中,无人集卡收到水平运输系统指令后前往作业位置执行运输任务。当电量不足时,无人集卡发送充电请求,智能充电桩系统收到请求后为无人集卡下发具体的充电指令,无人集卡接收指令后基于车辆运动学特性生成具体路径,前往指定充电桩进行充电作业。车辆到达充电位置后,智能充电桩检测车辆位置是否满足充电头的匹配精度,作业精度满足要求无人集卡即开始充电作业,车辆完成充电任务后等待系统下一步作业指令。
2 无人集卡充电策略
2.1 充电桩分布
根据无人集卡电量需求设置不同的充电桩数量和充电策略,以此提高充电桩利用率,并保证无人集卡车队电量维持在合理水平。无人集卡单车电量的计算公式可表示为
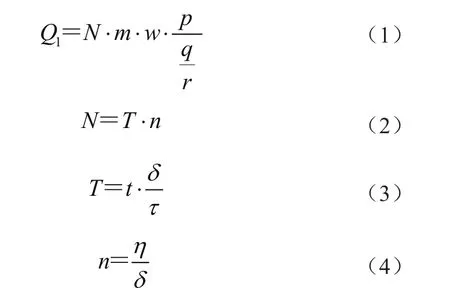
式中:Q1为单车电量;Q为每小时耗电量;N为连续作业循环次数;m为每趟平均公里数,由仿真确定;w为平均公里单耗,约为2~2.3 kW·h/km;p为冬季单耗系数,预估1.2;q为冬季电量下降比,预估80%;r为可用电量比,数值为20%~80%快速充电区间电量比;T为需要连续运行时间;n为每小时作业趟数;t为单车快速充电时间,数值为充电时间的30%~80%;δ为无人集卡与岸桥配比,数值由仿真确定;τ为充电桩利用率,数值为充电时间和作业时间的比值;η为岸桥效率。
按照岸桥效率28 mov/h,计算可得无人集卡单车电量:1C型为161 kW·h;1.5C型为107 kW·h。按照岸桥效率30 mov/h,计算可得无人集卡单车电量:1C型为172 kW·h;1.5C型为114 kW·h。按照岸桥效率32 mov/h,计算可得无人集卡单车电量:1C型为184 kW·h;1.5C型为122 kW·h。由此推荐车载电量:1C型电池为180~200 kW·h;1.5C型电池为120~130 kW·h。
基于单车电量的计算式(1)~式(4)可得出无人集卡每小时耗电量为

式中:l为无人集卡数量,其余同上。
由以上计算得到所需充电桩数量为10.9套,即设置11套充电桩可满足需求。考虑到充电桩故障等实际情况,本方案共设置13套充电桩。
如图2、图3所示,港区充电桩设置在码头前沿A01场和C01场的海侧车道附近。A01场和C01场对应充电区域长度分别为283 m、255 m,各自分为4个子区域,相邻子区域的间距为48 m,子区域内相邻2个充电桩间隔28 m。

图2 A01场对应充电桩分布
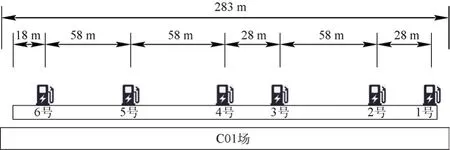
图3 C01场对应充电桩分布
在实际装卸船作业中,需要根据集装箱作业量动态调整无人集卡作业数量,根据无人集卡需求电量动态调整充电桩数量:
1)基于岸桥作业量中位数计算,1台岸桥需配置6辆无人集卡进行集装箱装卸作业,共有12台岸桥,则需要配置72辆无人集卡;对应需要配置11台充电桩保证无人集卡的充电需求,车队管理系统调度A场所有充电桩及C场4台充电桩进行充电,其中C场依次选用1~4号充电桩,以避免无人集卡转弯半径受限问题。
2)基于岸桥最大作业量计算,岸桥数量为12台,此时需要配置95台无人集卡进行装卸作业,对应需要配置13台充电桩保证无人集卡的充电需求,车队管理系统调度A场及C场所有充电桩进行充电,根据充电位进出原则为无人集卡分配具体的充电位。
在实际情况中,无人集卡单车长度为18 m,充电车辆需要40 m间隔才能直接进入充电位。所以,子区域的2个相邻充电桩中若左侧充电桩正在充电作业,则分配来右侧充电桩充电的无人集卡将面临变道区域不够宽的窘境,导致右侧充电桩无法使用。因此,应在左侧充电桩充电的无人集卡进入右侧充电桩进行二次充电,才能将另一辆无人集卡安排至该子区域的左侧充电桩充电;如果子区域相邻充电桩都有无人集卡充电,若左侧充电桩的集卡先充电结束。由于转弯空间不足,无法变道驶离左侧充电桩,故需等待右侧充电车辆离开。
以上情况表明,充电桩分配需要兼顾车辆动力学限制及充电桩位置限制,以确保充电桩高效利用且减少充电区车辆等待时间。
2.2 无人集卡运动学特征
无人集卡的运行速度、加速度和制动性等方面在重载和空载时具有较大差异,充电策略的确定需要结合无人集卡的物理结构和运动学特性,精准计算无人集卡的行驶位置、转弯半径、转向变道覆盖区域和制动距离等,以确保无人集卡在码头前沿岸桥、堆场轮胎式集装箱起重机(以下简称场桥)等作业位的精准定位,以满足其在堆场箱区和前沿作业道与非作业道之间变道的性能要求,避免转弯半径过大或转向变道覆盖区域误算所引发的碰撞事故。
将无人集卡的前轮组和后轮组分别等效为1组等效轮。当无人集卡转弯时,前轮用于转向,后轮的方向始终不变。为了减少车轮磨损,转弯时2个前轮的转向角不一样,内侧车轮的转向角更大,如图4所示。
当转向时,过4个等效车轮转轴中心的法线相交于一点,前轮转向角决定了车辆的转弯半径,前轮转向角速度决定了车辆转弯半径的变化率。由于2个前轮的转向角与角速度是互相关联的,可将2个前轮等效为一个虚拟前轮,并位于前轮轮轴中点处,故仅需得到等效虚拟前轮的相关参数即可确定无人集卡的最小转弯半径。无人集卡最小转弯半径计算可表示为
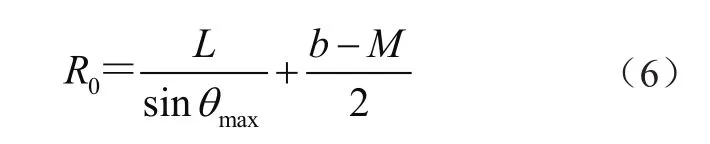
式中:R0为无人集卡最小转弯半径,L为轴距,θmax为等效虚拟前轮最大转角,b为前轮距,M为主销中心距。
由表1所示数据计算可得,无人集卡的最小转弯半径为≤6 700 mm。
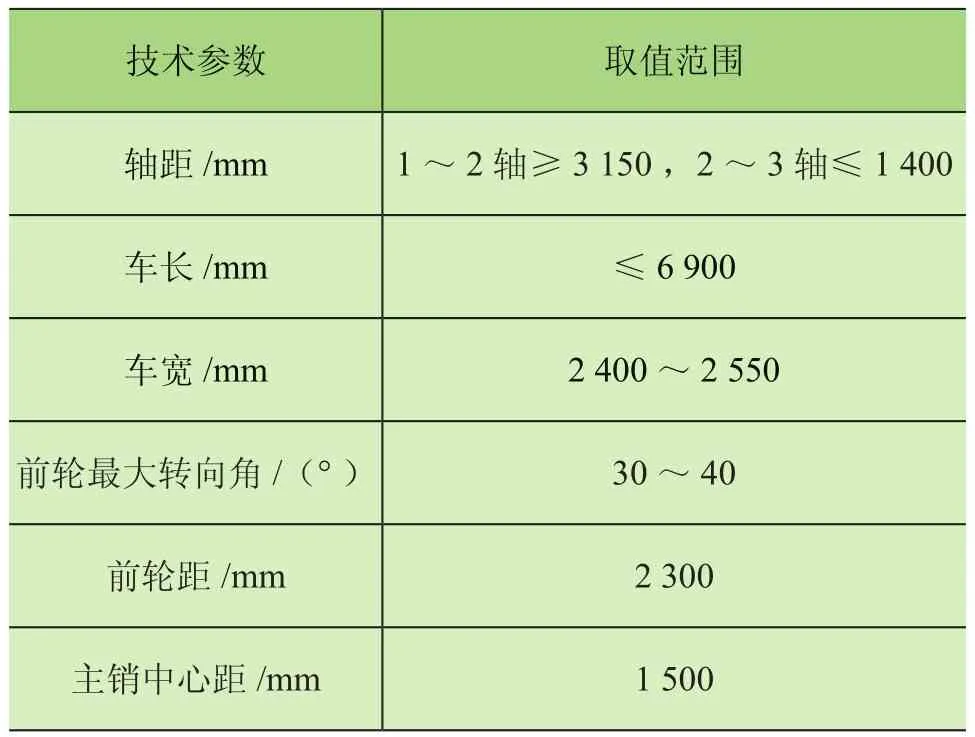
表1 无人集卡技术参数取值范围表
2.3 阶梯充电策略
阶梯充电策略流程如图5所示。系统通过作业集卡电量和数量计算充电桩需求数量,将剩余充电桩用于非作业集卡充电,无人集卡收到指令之后自主规划路径选择充电桩,充电完成之后等待系统调度。作业中无人集卡充电策略分为主动充电与被动充电2种方式。
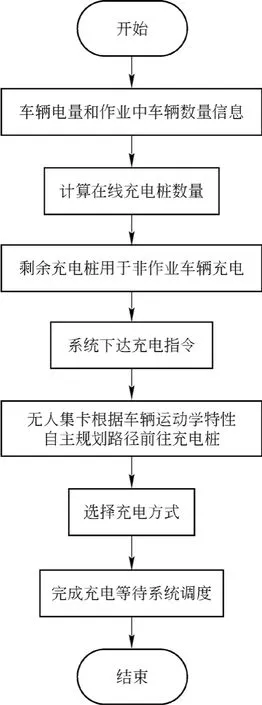
图5 充电策略流程
1)主动充电方式的流程
①当作业中集卡电量低于设定下限值时,向系统发送下线充电申请,无人集卡完成当前任务后按照指令前往指定位置充电。
②系统收到申请后,查看充电桩使用情况,若有空闲充电桩,优先指派无人集卡前往距离最近的空闲充电桩;若无空闲充电桩,则从系统中选择一辆正在充电的无人集卡停止充电,同时规划集卡进入本位进行充电的路径。选取原则为:首先从距离最近的充电集卡中查看是否有电量超过快充上限的,若有,则从超过设定值的无人集卡中选取当前电量最低的集卡停止充电;若不存在超过快充上限的集卡,则选取当前电量最高的无人集卡停止充电。
③当充电中的集卡电量达到快充上限时,向系统报告即将完成充电任务并等待系统调度。系统接到报告后,查看所有作业中无人集卡的信息,若不存在剩余电量低于下限值的作业集卡,则使正在充电的集卡继续充电,直至收到系统调度指令或电量达到最大上限值;若有低于电量下限值的作业集卡,则在作业集卡中电量最低的集卡完成当前任务后,指派其进入本充电位,同时系统指派达到快充上限的集卡上线作业。
2)被动充电方式的流程
①当作业集卡平均电量低于设定中值时,系统查询所有电量高于快充上限的非作业集卡,将作业集卡电量由低到高排序,优先替换非作业集卡中电量最高集卡,被替换下线的作业集卡按规划行驶至空闲充电桩充电。
②当充电中的集卡达到电量设定上限值时,申请上线作业并等待系统调度,同时系统强制作业集卡中最低电量的集卡完成当前任务后下线充电,当前充电完成集卡则上线作业。
3)非作业集卡充电策略流程
①当非作业集卡电量低于设定下限值时,向系统发送下线充电申请;系统接到申请后,查看当前充电桩使用情况,若存在空闲充电桩,则优先选取距离该作业集卡最近的充电桩;若无空闲充电桩,则选择一辆非作业充电集卡停止充电,同时规划作业集卡进入此充电桩的路径。选取原则为:优先查看是否存在电量超过充电上限值的集卡,若存在则从电量超过80%设定值的集卡中选择电量最低的集卡停止充电;若不存在则选取当前正在充电的集卡中最高电量的集卡。
②当充电中的集卡达到快充上限值时,申请驶离充电位并等待系统调度。系统接到申请后,查看所有空闲的非作业集卡信息,选择电量低于下限值的非作业集卡驶进充电位充电,同时调度电量达到快充上限值的集卡离开充电位并行驶到指定位置停车。
③当充电中的集卡达到电量上限值时,完成充电并进入指定停车位等待调度,同时系统查询所有非作业集卡充电记录,若存在最近一周内未到达充电至上限值的集卡,则选取该集卡进入充电位充电;若不存在上述集卡,则指派当前电量最低的作业集卡进行充电,已经充电完成的非作业集卡上线转为作业集卡。
以上所述的充电方式均设置快充与慢充2种模式,无人集卡电量水平处于总量的80%~100%时为高电量状态,选择慢充充电方式;无人集卡电量水平处于总量的30%~80%时为低电量状态,选择快充充电方式。在充相同电量相同的情况下,2种充电方式耗时不同。
3 充电管理系统
基于以上无人集卡充电策略,设计了无人集卡充电管理系统,该系统包含充电桩首页、设备监控中心、充电记录监控中心、异常监控中心、用户管理中心和详情6个子功能。
图6所示为充电桩首页,该页面能够显示当前设备运行状态,可生成各充电桩充电次数对比图以及7日充电次数对比图和充电电量对比图。
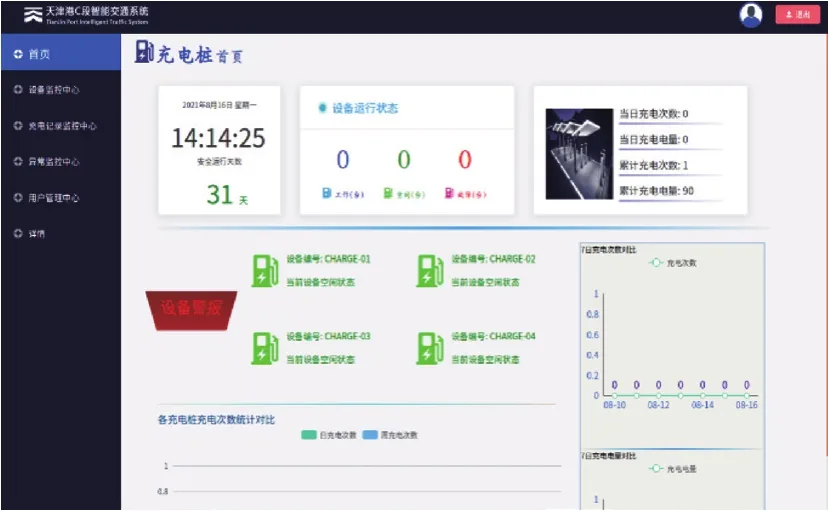
图6 充电桩首页
图7所示为设备监控中心页面,该页面主要显示了码头所有充电桩的运行状态,以及当前正在充电车辆的对应编号。

图7 设备监控中心
图8所示为充电记录监控中心页面,主要功能为显示充电桩作业的详细信息,包括充电方式、对位车辆、充电开始时间和结束时间、充电车辆的起始电量、充电桩当前状态等信息。

图8 充电记录监控中心
图9所示为设备异常监控中心,该页面能够详细展示故障设备编号、故障开始时间和结束时间、故障编码及对应的原因、故障处理方式及处理员等信息。

图9 设备异常监控中心
图10所示为用户管理中心,该页面能够查看当前用户的ID、用户名、所属部门以及操作权限,并能新增用户以及为用户添加操作权限。

图10 用户管理中心
4 总结
在分析无人集卡作业流程的基础上,综合考虑无人集卡运动学特性,根据码头实际作业情况,动态调整充电桩位置和数量,降低了无人集卡充电等待时间。通过设置阶梯充电策略提高充电桩利用率,使无人集卡电量始终维持在较高水平。同时,将无人集卡划分为作业车辆和非作业车辆进行管理,保证充电桩设备的作业均衡性和集装箱运输效率。与国内外其他码头采用的定点充电策略相比,阶梯充电策略能够保证运输设备电量水平、提高港口作业效率,具有很高的实际应用价值。